Поваляев А. А.ОАО «Российские космические системы»Влияние вращения Земли на определение координат и составляющих вектора скоро
- Поваляев А. А.ОАО «Российские космические системы»Влияние вращения Земли на определение координат и составляющих вектора скоро

Содержание
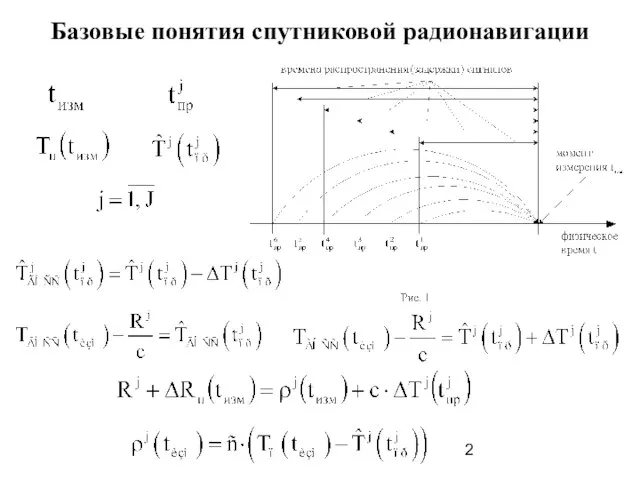
- 2. Базовые понятия спутниковой радионавигации
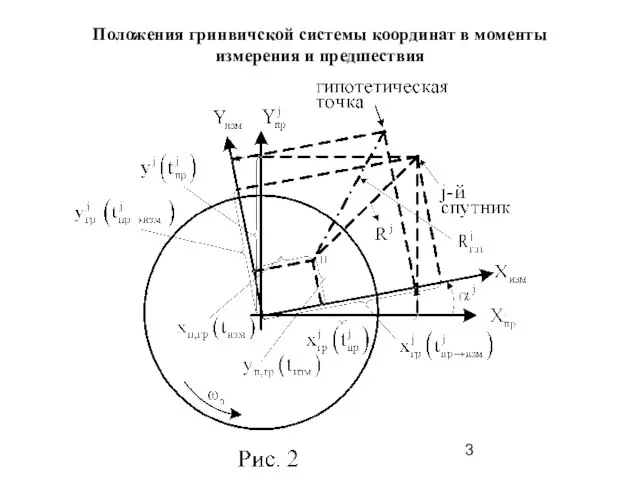
- 3. Положения гринвичской системы координат в моменты измерения и предшествия
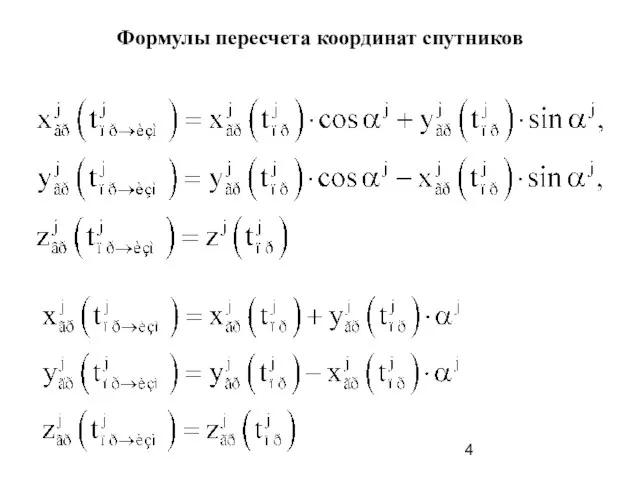
- 4. Формулы пересчета координат спутников
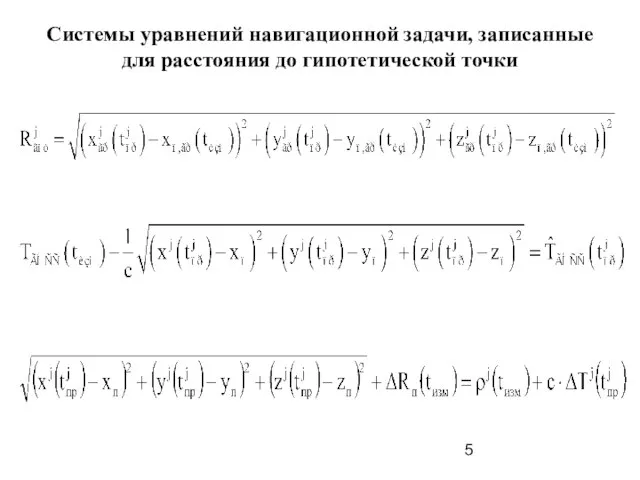
- 5. Системы уравнений навигационной задачи, записанные для расстояния до гипотетической точки
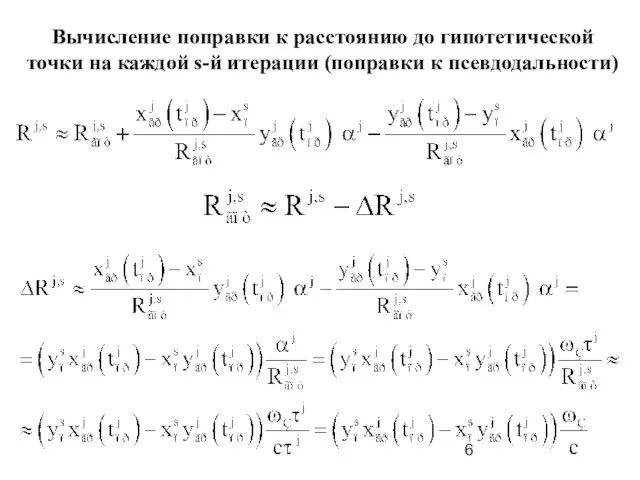
- 6. Вычисление поправки к расстоянию до гипотетической точки на каждой s-й итерации (поправки к псевдодальности)
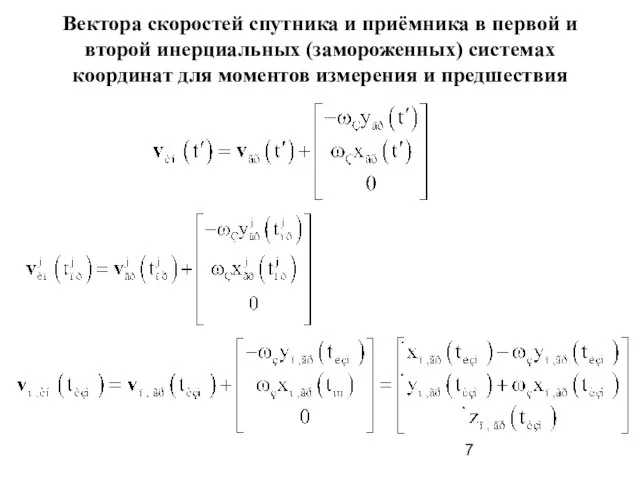
- 7. Вектора скоростей спутника и приёмника в первой и второй инерциальных (замороженных) системах координат для моментов измерения
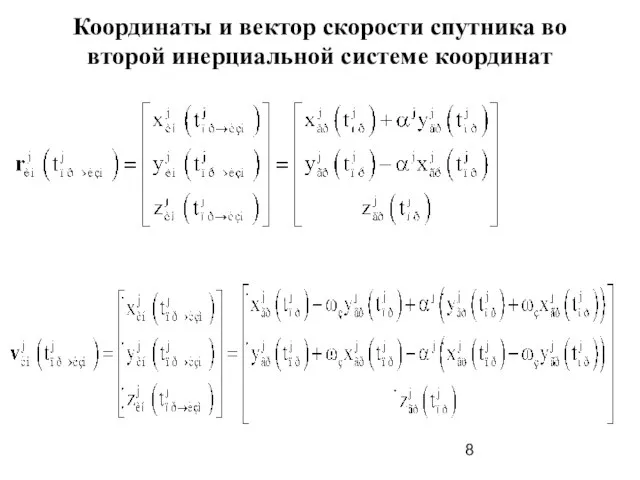
- 8. Координаты и вектор скорости спутника во второй инерциальной системе координат
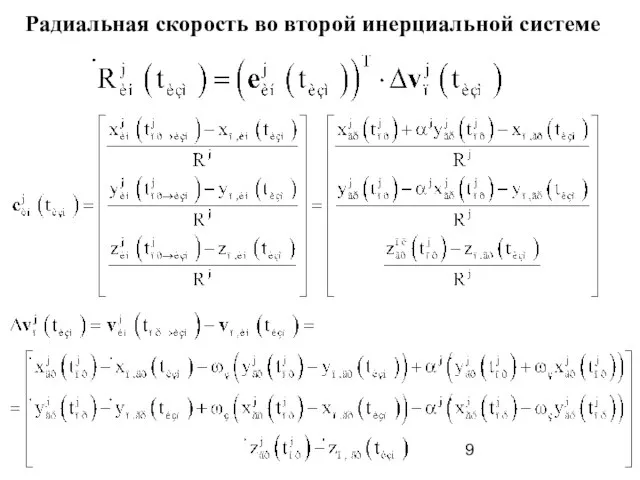
- 9. Радиальная скорость во второй инерциальной системе
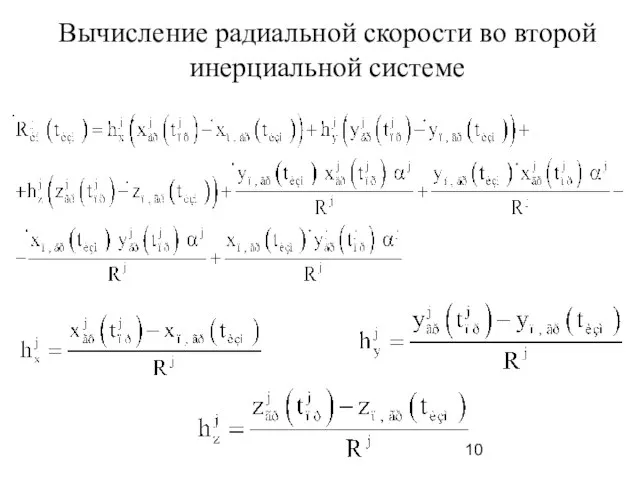
- 10. Вычисление радиальной скорости во второй инерциальной системе
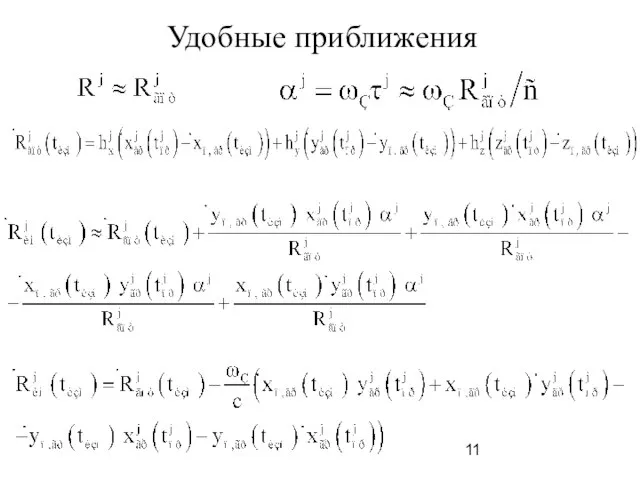
- 11. Удобные приближения
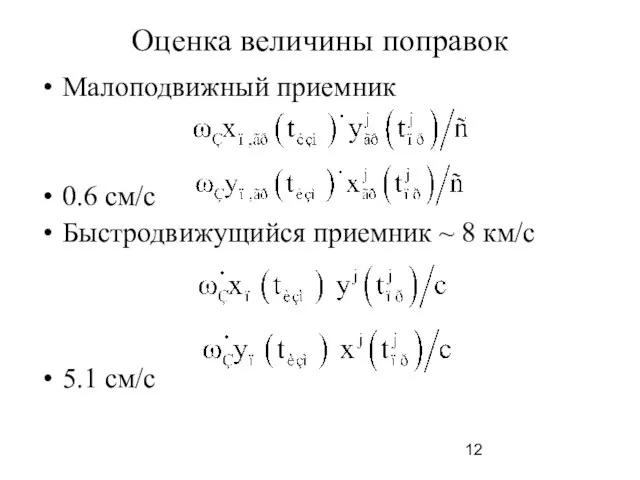
- 12. Оценка величины поправок Малоподвижный приемник 0.6 см/с Быстродвижущийся приемник ~ 8 км/с 5.1 см/с
- 13. Выводы При обработке измерений псевдодальностей для определения координат потребителя учет вращения Земли является обязательным. Для обработки
- 15. Скачать презентацию
Слайд 3Положения гринвичской системы координат в моменты
измерения и предшествия
Положения гринвичской системы координат в моменты
измерения и предшествия
Слайд 4Формулы пересчета координат спутников
Формулы пересчета координат спутников
Слайд 5Системы уравнений навигационной задачи, записанные для расстояния до гипотетической точки
Системы уравнений навигационной задачи, записанные для расстояния до гипотетической точки
Слайд 6Вычисление поправки к расстоянию до гипотетической
точки на каждой s-й итерации (поправки к
Вычисление поправки к расстоянию до гипотетической точки на каждой s-й итерации (поправки к
Слайд 7Вектора скоростей спутника и приёмника в первой и второй инерциальных (замороженных) системах
Вектора скоростей спутника и приёмника в первой и второй инерциальных (замороженных) системах
Слайд 8Координаты и вектор скорости спутника во второй инерциальной системе координат
Координаты и вектор скорости спутника во второй инерциальной системе координат
Слайд 9Радиальная скорость во второй инерциальной системе
Радиальная скорость во второй инерциальной системе
Слайд 10Вычисление радиальной скорости во второй инерциальной системе
Вычисление радиальной скорости во второй инерциальной системе
Слайд 11Удобные приближения
Удобные приближения
Слайд 12Оценка величины поправок
Малоподвижный приемник
0.6 см/с
Быстродвижущийся приемник ~ 8 км/с
5.1 см/с
Оценка величины поправок
Малоподвижный приемник
0.6 см/с
Быстродвижущийся приемник ~ 8 км/с
5.1 см/с
Слайд 13Выводы
При обработке измерений псевдодальностей для определения координат потребителя учет вращения Земли является
Выводы
При обработке измерений псевдодальностей для определения координат потребителя учет вращения Земли является
 Презентация на тему Economy of Canada (Экономика Канады)
Презентация на тему Economy of Canada (Экономика Канады) Белки
Белки prezentatsiya-lemon-festival-starlight-6 (1)
prezentatsiya-lemon-festival-starlight-6 (1) Технологическая среда ведения бизнеса
Технологическая среда ведения бизнеса Формы мышления. Логика
Формы мышления. Логика Легкая атлетика
Легкая атлетика Система дистанционного обучения Moodlе
Система дистанционного обучения Moodlе Тема: «Формирование эмоционально-ценностного отношения к миру у учащихся через экологический модуль на уроках химии»
Тема: «Формирование эмоционально-ценностного отношения к миру у учащихся через экологический модуль на уроках химии» Презентация на тему Занятость и безработица (11 класс)
Презентация на тему Занятость и безработица (11 класс) Программно-аппаратные комплексы для масштабной наработки стволовых клеток человека
Программно-аппаратные комплексы для масштабной наработки стволовых клеток человека Алюминиевые и магнивые сплавы.маркировка, свойства, применяемость
Алюминиевые и магнивые сплавы.маркировка, свойства, применяемость НАПРАВЛЕНИЕ ПОДГОТОВКИ: ПЕДАГОГИЧЕСКОЕ ОБРАЗОВАНИЕ ПРОФИЛЬ ПОДГОТОВКИ ГЕОГРАФИЯ ШКОЛА ПЕДАГОГИКИ.
НАПРАВЛЕНИЕ ПОДГОТОВКИ: ПЕДАГОГИЧЕСКОЕ ОБРАЗОВАНИЕ ПРОФИЛЬ ПОДГОТОВКИ ГЕОГРАФИЯ ШКОЛА ПЕДАГОГИКИ. Зиновьева Зоя. Самопрезентация
Зиновьева Зоя. Самопрезентация Презентация на тему Риск. Виды рисков, методы нейтрализации рисков
Презентация на тему Риск. Виды рисков, методы нейтрализации рисков  ПРАВОВЫЕ ОСНОВЫ ИННОВАЦИОННОЙ ДЕЯТЕЛЬНОСТИ
ПРАВОВЫЕ ОСНОВЫ ИННОВАЦИОННОЙ ДЕЯТЕЛЬНОСТИ  Фронтальная компфронтальная композиция, развёрнутая фронтально к главной точке зрения
Фронтальная компфронтальная композиция, развёрнутая фронтально к главной точке зрения Социальные права граждан.
Социальные права граждан.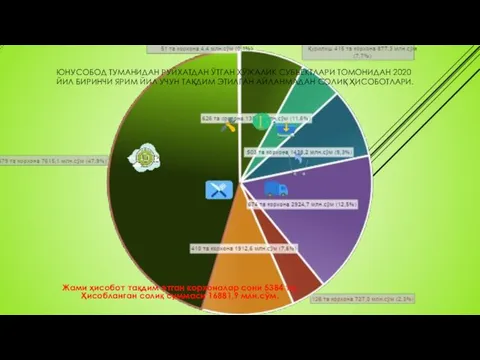 Юнусобод туманидан руйхатдан ўтган хўжалик субъектлари томонидан 2020
Юнусобод туманидан руйхатдан ўтган хўжалик субъектлари томонидан 2020 Health is the Greatest wealth
Health is the Greatest wealth ОП_Лекція_03
ОП_Лекція_03 Мы должны гордиться тем, что живем в одном из красивейших уголков Западной Сибири, с относительно благополучной экологической обс
Мы должны гордиться тем, что живем в одном из красивейших уголков Западной Сибири, с относительно благополучной экологической обс Модификация как один из эффективных способов совершенствования эксплуатационных свойств фанерной продукции
Модификация как один из эффективных способов совершенствования эксплуатационных свойств фанерной продукции Наши эмоции
Наши эмоции Понятие вакуума.Вакуумная техника.Семинар студентов и аспирантов ИФМ РАНдокладчик: А.Е. Пестов
Понятие вакуума.Вакуумная техника.Семинар студентов и аспирантов ИФМ РАНдокладчик: А.Е. Пестов Подготовка к ЕГЭ Задание А13-14, вариант 2. Орфография
Подготовка к ЕГЭ Задание А13-14, вариант 2. Орфография Рефлексивная компетентность как компонент структуры личности младшего школьника
Рефлексивная компетентность как компонент структуры личности младшего школьника Русские сезоны в Париже
Русские сезоны в Париже Спичечное и тарное производство
Спичечное и тарное производство