- АДАПТАЦИЯ ФИЛЬТРА КАЛМАНАДЛЯ ИСПОЛЬЗОВАНИЯ С ЛОКАЛЬНОЙИ ГЛОБАЛЬНОЙ СИСТЕМОЙ НАВИГАЦИИ

Содержание
- 2. Содержание Идея построения фильтра Моделирование работы фильтра Результаты моделирования
- 3. Три основных задачи навигации: Где я? - Локализация. Куда я направляюсь? – Определение цели. Как мне
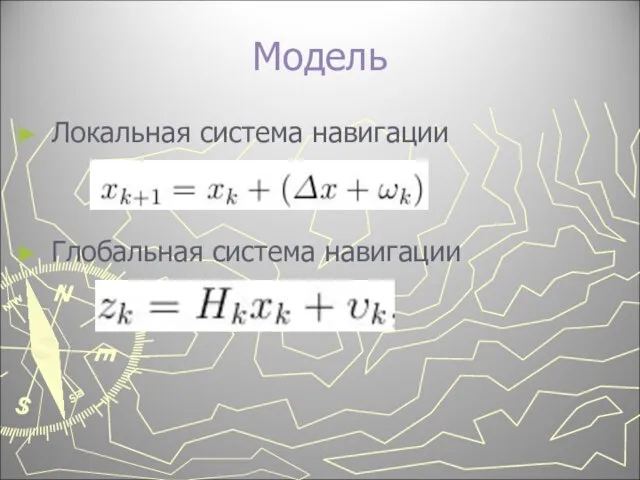
- 4. Модель Локальная система навигации Глобальная система навигации
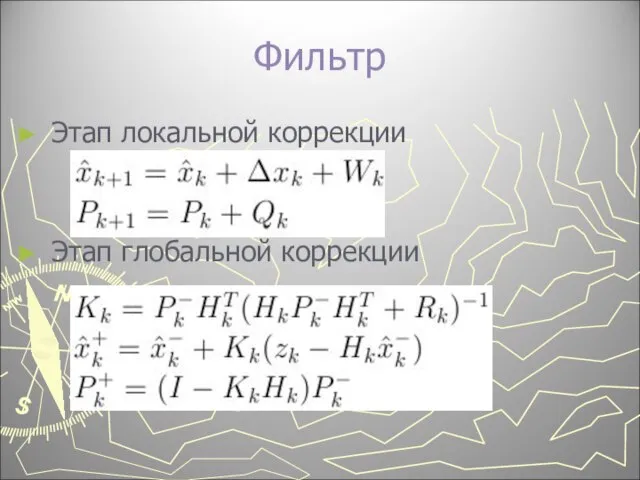
- 5. Фильтр Этап локальной коррекции Этап глобальной коррекции
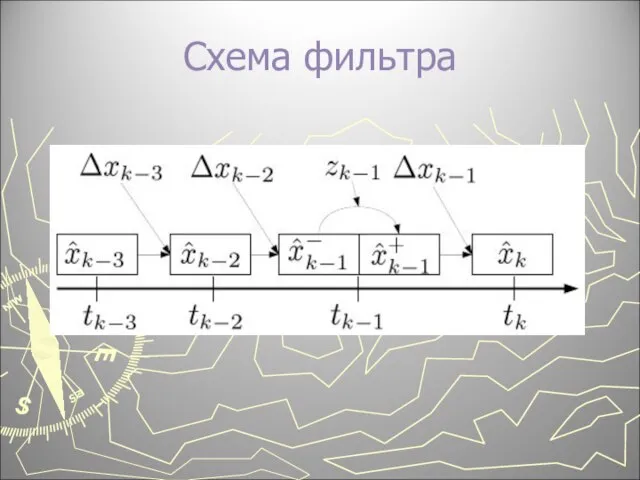
- 6. Схема фильтра
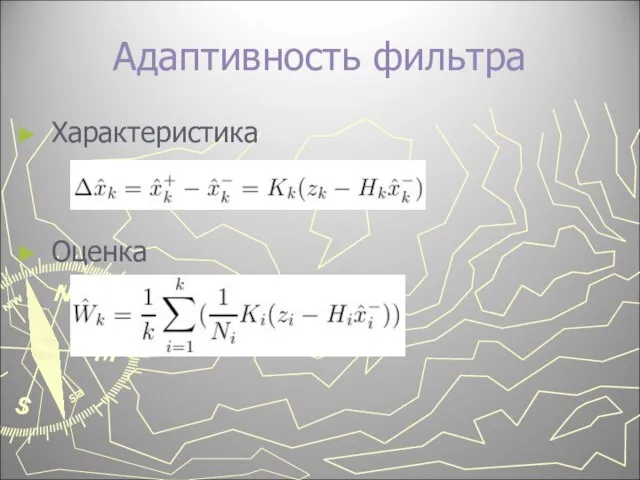
- 7. Адаптивность фильтра Характеристика Оценка
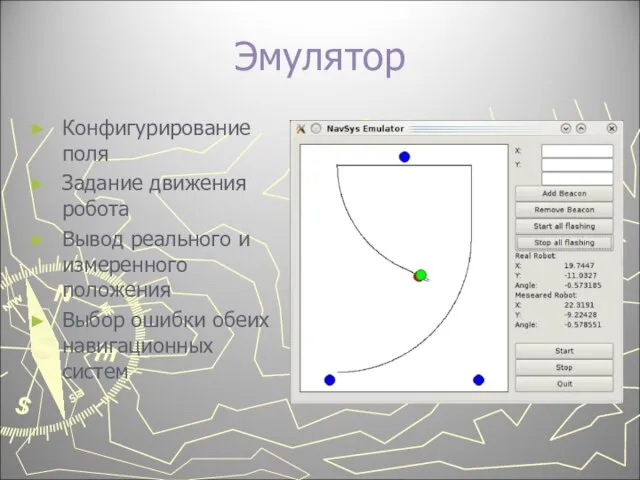
- 8. Эмулятор Конфигурирование поля Задание движения робота Вывод реального и измеренного положения Выбор ошибки обеих навигационных систем
- 9. Схема работы эмулятора
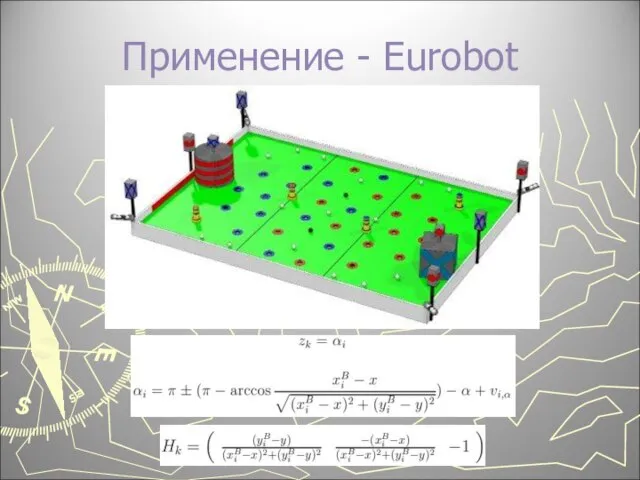
- 10. Применение - Eurobot
- 11. Применение – Гусеничный робот
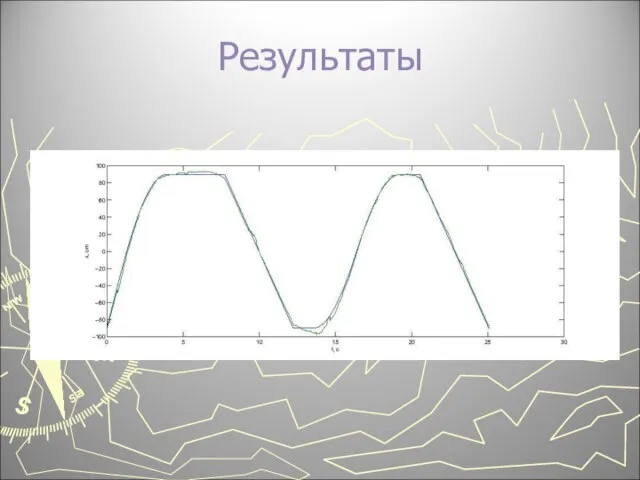
- 12. Результаты
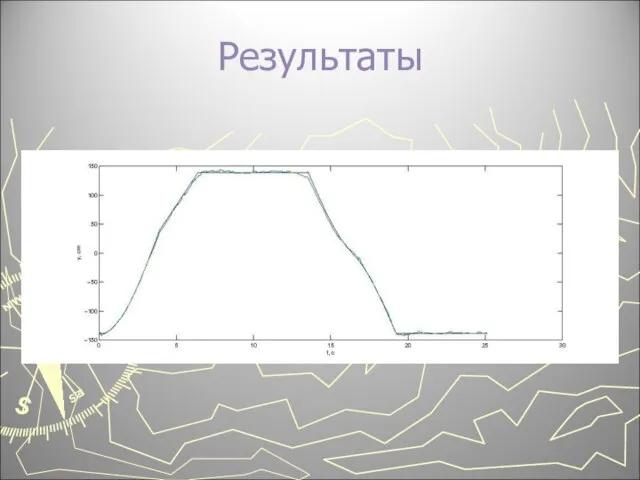
- 13. Результаты
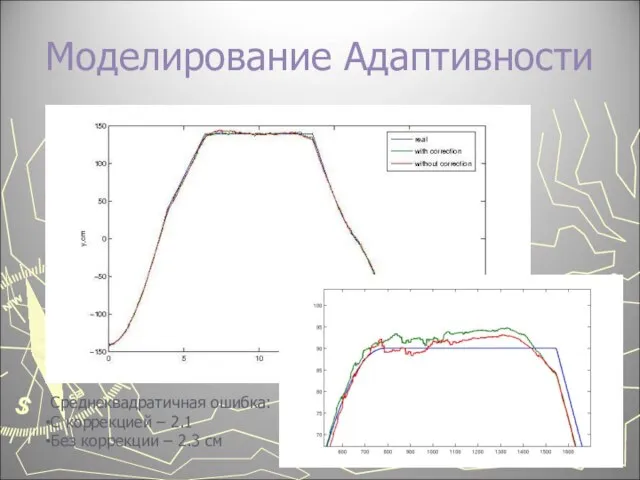
- 14. Моделирование Адаптивности Среднеквадратичная ошибка: С коррекцией – 2.1 Без коррекции – 2.3 см
- 16. Скачать презентацию
Слайд 3Три основных задачи навигации:
Где я? - Локализация.
Куда я направляюсь? – Определение цели.
Как
Три основных задачи навигации:
Где я? - Локализация.
Куда я направляюсь? – Определение цели.
Как
Слайд 4Модель
Локальная система навигации
Глобальная система навигации
Модель
Локальная система навигации
Глобальная система навигации
Слайд 5Фильтр
Этап локальной коррекции
Этап глобальной коррекции
Фильтр
Этап локальной коррекции
Этап глобальной коррекции
Слайд 6Схема фильтра
Схема фильтра
Слайд 7Адаптивность фильтра
Характеристика
Оценка
Адаптивность фильтра
Характеристика
Оценка
Слайд 8Эмулятор
Конфигурирование поля
Задание движения робота
Вывод реального и измеренного положения
Выбор ошибки обеих навигационных систем
Эмулятор
Конфигурирование поля
Задание движения робота
Вывод реального и измеренного положения
Выбор ошибки обеих навигационных систем
Слайд 9Схема работы эмулятора
Схема работы эмулятора

Слайд 10Применение - Eurobot
Применение - Eurobot
Слайд 11Применение – Гусеничный робот
Применение – Гусеничный робот

Слайд 12Результаты
Результаты
Слайд 13Результаты
Результаты
Слайд 14Моделирование Адаптивности
Среднеквадратичная ошибка:
С коррекцией – 2.1
Без коррекции – 2.3 см
Моделирование Адаптивности
Среднеквадратичная ошибка:
С коррекцией – 2.1
Без коррекции – 2.3 см
 Внедрение в учебный процесс новых технологий обучения
Внедрение в учебный процесс новых технологий обучения Экология и экологическая безопасность
Экология и экологическая безопасность Особенности построения на клетчатой бумаге
Особенности построения на клетчатой бумаге Использование технологии критического мышления на уроках русского языка и литературы
Использование технологии критического мышления на уроках русского языка и литературы Наше лето 2016
Наше лето 2016 Факультет информационных и библиотечных технологий КемГИК
Факультет информационных и библиотечных технологий КемГИК Форумная компания
Форумная компания UP_DKI_Tema 7_Semestr 2_E`IOS
UP_DKI_Tema 7_Semestr 2_E`IOS Азбука закаливания
Азбука закаливания АНАТОМИЯ и ВОЗРАСТНАЯ ФИЗИОЛОГИЯ
АНАТОМИЯ и ВОЗРАСТНАЯ ФИЗИОЛОГИЯ Индустриальный парк Горки - 1
Индустриальный парк Горки - 1 Русско-турецкие войны 17—19 вв.
Русско-турецкие войны 17—19 вв. Пейзаж
Пейзаж Презентация на тему Храмы-памятники русской воинской славы
Презентация на тему Храмы-памятники русской воинской славы  работА в текстовом редакторе Microsoft Word 2007
работА в текстовом редакторе Microsoft Word 2007 Лекция 5. Структура населения
Лекция 5. Структура населения Фотосток - банк изображений
Фотосток - банк изображений Структура курса сравнительного права
Структура курса сравнительного права Методика обучения плаванию способом кроль на груди
Методика обучения плаванию способом кроль на груди «Разработка фрагмента информационной системы расчета заработной платы на примере ОАО «Взято с сайта http://diplom-base.ru/»
«Разработка фрагмента информационной системы расчета заработной платы на примере ОАО «Взято с сайта http://diplom-base.ru/» Виды техник и приемов живописи акварелью
Виды техник и приемов живописи акварелью Презентация на тему Британский музей
Презентация на тему Британский музей Времена года Тает снежок, ожил лужок. День прибывает. Когда это бывает? (весна) Март Март Апрель Апрель Май Май.
Времена года Тает снежок, ожил лужок. День прибывает. Когда это бывает? (весна) Март Март Апрель Апрель Май Май. Результаты маркетингового исследования торговой сети Варус и АТБ
Результаты маркетингового исследования торговой сети Варус и АТБ откуда произошли цифры
откуда произошли цифры Основные подходы к формированию проекта федерального бюджета на 2012 год и на плановый период 2013 и 2014 годов
Основные подходы к формированию проекта федерального бюджета на 2012 год и на плановый период 2013 и 2014 годов Комплексные решения клининга для современного ЛПУ
Комплексные решения клининга для современного ЛПУ Опричнина ИванаIV Грозного
Опричнина ИванаIV Грозного