- Баланс мощностей и регулирование частоты в ЭЭС

Содержание
- 2. Уравнения (4.1) и (4.2) представляют так называемый баланс мощностей. Рассмотрим эквивалентную схему ЭЭС, в которой эквивалентный
- 3. В установившемся режиме мощности нагрузки представляются их статическими характеристиками по частоте и напряжению Суммарные мощности потребления
- 4. Частота и напряжения в ЭЭС не могут оставаться постоянными, так как потребление активной и реактивной мощностей
- 5. С учетом (4.4) баланс мощностей (4.1) и (4.2) можно переписать так: Обозначим параметры некоторого исходного режима
- 6. При этом уравнения (4.5) и (4.6) можно представить приближенными линеаризованными зависимостями между отклонениями параметров (разложение в
- 7. С учетом того, что в исходном режиме соблюдается баланс мощности получим систему линейных алгебраических уравнений: Система
- 8. Обобщенные статические характеристики потребления активной и реактивной мощностей для ЭЭС показаны на рис. 4.2. Коэффициенты af,
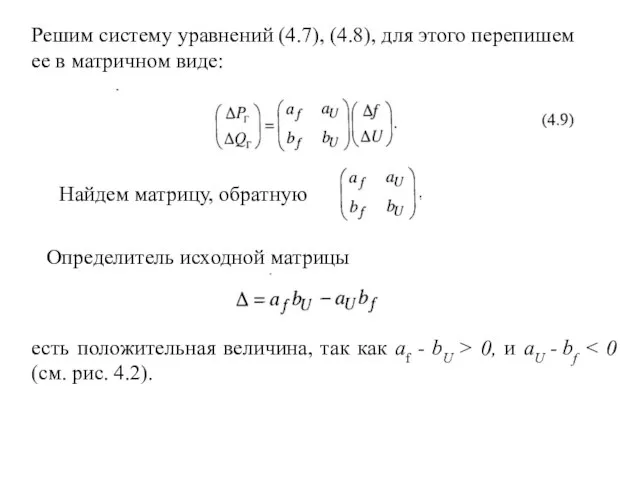
- 10. Решим систему уравнений (4.7), (4.8), для этого перепишем ее в матричном виде: Определитель исходной матрицы есть
- 11. умножим на неё слева обе
- 12. По данным соотношениям можно увидеть влияние изменений генерируемых мощностей Ha изменение частоты и напряжения. Пусть ΔPГ
- 13. Отсюда с учетом af » aU следует, что уменьшение реактивной мощности в большей степени сказывается нa
- 14. В результате можно установить, какие воздействия нa режим ЭЭС следует предпринять, чтобы осуществить регулирование частоты и
- 15. 4.2. ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ ДВИГАТЕЛЕЙ Мощности потребителей меняются в каждый момент времени. Медленные изменения можно прогнозировать. Ha
- 16. Рассмотрим характеристики первичных двигателей - тепловых и гидравлических турбин, определяющих изменение их мощности под действием систем
- 17. .
- 18. Снижение нагрузки в ЭЭС приведет к уменьшению тока в обмотках статора генератора и снижению электромагнитного момента
- 20. В случае регулируемой турбины увеличение ее скорости вращения приведет в действие автоматический регулятор скорости (АРС), который
- 21. АРС, который вступает в действие с некоторым запаздыванием tзап изменит характер процесса. Этот процесс может быть
- 23. Характеристику АРС турбины часто представляют в координатах скорости и мощности генератора (рис. 4.6). В случае нерегулируемой
- 25. 4.3. ПЕРВИЧНОЕ И ВТОРИЧНОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ Вновь рассмотрим электрическую систему, представленную эквивалентной схемой на рис. 4.1.
- 27. Пусть теперь в ЭЭС происходит наброс потребляемой мощности на величину ΔР. Новой нагрузке отвечает статическая характеристика
- 28. Эффективность первичного регулирования частоты зависит от статизма регулятора скорости. Меньшему статизму соответствует более крутая характеристика регулирования,
- 30. АРЧ на принципе ООС воздействует непосредственно на АРС. Вторичное регулирование отражается (см. рис. 4.7) эквидистантным перемещением
- 31. Астатический регулятор мог бы устанавливаться на одном из агрегатов. При этом не будет неопределенного распределения мощности
- 32. Коэффициент крутизны характеристики регулирования равен тангенсу угла наклона характеристики АРС (рис. 4.7) к оси абцисс. Крутизна
- 33. Статизм характеристики регулятора s есть величина, обратная коэффициенту крутизны: Астатическому регулированию отвечает значение . Из (4.13)
- 34. Вторичное регулирование независимо от величины AP, обусловливает равенство Δf = 0, т. е. по своему конечному
- 35. Аналогично коэффициенту крутизны k, характеристики регулирования вводится понятие коэффициента крутизны статической характеристики нагрузки ЭЭС. Фактически этот
- 36. Знак плюс в (4.17) означает, что с увеличением частоты (Δf > 0) мощность нагрузки растет (ΔP
- 37. Отношение (номинальной генерирующей мощности к фактической нагрузке) называется коэффициентом резерва ρ. Таким образом, имеем: Отсюда изменение
- 38. 4.4. РЕГУЛИРОВАНИЕ ЧАСТОТЫ В ЭЭС В реальной ЭЭС содержится большое количество параллельно работающих станций. Турбины каждой
- 39. Просуммировав левые и правые части записанных уравнений, получим Введем понятие средней крутизны характеристики регулирования генерирующей мощности
- 40. Суммарное изменение генерирующей мощности ЭЭС в результате первичного регулирования при изменении частоты на Δf можно определить
- 41. Наиболее просто вторичное регулирование реализуется с помощью одной станции. Такой метод называется меmодом ведущей станции no
- 43. Установление номинальной частоты в ЭЭС происходит на стадии вторичного регулирования. АРЧ станции, ведущей по частоте, изменяет
- 44. Для успешного регулирования частоты станция, выбираемая в ЭЭС в качестве ведущей, должна удовлетворять определенным требованиям, главными
- 45. Ha тепловых станциях пределы изменения выдаваемой мощности определяются условиями работы котельных агрегатов и паровых турбин. Наибольшие
- 46. Таким образом, вследствие ограничения регулировочного диапазона тепловых электростанций, в качестве станций, ведущих по частоте, выбирают станции,
- 47. Опасные последствия, которые может повлечь значительное снижение частоты в ЭЭС, заставляют в этих случаях применять в
- 49. 4.5. ПОТРЕБИТЕЛИ РЕАКТИВНОЙ МОЩНОСТИ Потребителями реактивной мощности в ЭЭС являются все без исключения электроприемники переменного тока.
- 50. В соответствии с балансом (4.2) потребление в ЭЭС реактивной мощности: В составе нагрузки ЭЭС и собственных
- 51. Значительные потери реактивной мощности имеются в ЛЭП, однако зарядная мощность линий частично компенсирует эти потери, а
- 52. Реактивная мощность нагрузок ЭЭС складывается из отдельных мощностей электроприемников: Коэффициенты мощности и реактивной мощности некоторых электроприемников
- 54. Величина потребляемой реактивной мощности электроприемников в большей мере зависит от напряжения электрической сети, а для асинхронных
- 55. Для поддержания нормального режима в ЭЭС потребление реактивной мощности должно обеспечиваться требуемой генерируемой мощностью и наряду
- 56. В процессе проектных расчетов по определению оптимальной компенсации реактивной мощности решаются две основные задачи: 1) установление
- 57. 4.5. ВЫРАБОТКА РЕАКТИВНОЙ МОЩНОСТИ НА ЭЛЕКТРОСТАНЦИЯХ Главным источником реактивной мощности в ЭЭС являются генераторы электростанций. Изменение
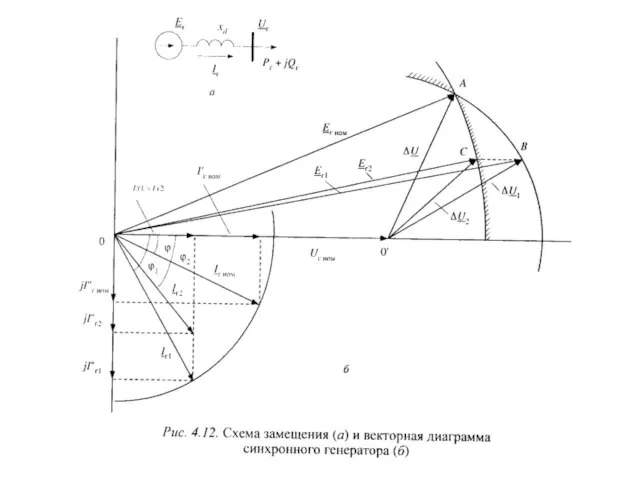
- 58. При работе в часы максимума реактивной нагрузки иногда необходимо понижение cosϕ генератора относительно номинального значения (увеличение
- 60. В соответствии с диаграммой будем иметь: - активная мощность - реактивная мощность
- 61. Векторы токов и напряжений статора в номинальном режиме равны Uг ном и . Радиусом, равным величине
- 62. Приведенные рассуждения показывают, что при определении располагаемой реактивной мощности генератора при перевозбуждении решающее значение имеет ограничение
- 63. Все перечисленное определяет нижнюю границу тока возбуждения генератора и величины располагаемой реактивной мощности генератора в режиме
- 65. Скачать презентацию
Слайд 2Уравнения (4.1) и (4.2) представляют так называемый баланс мощностей.
Рассмотрим эквивалентную схему ЭЭС,
Уравнения (4.1) и (4.2) представляют так называемый баланс мощностей.
Рассмотрим эквивалентную схему ЭЭС,
Слайд 3В установившемся режиме мощности нагрузки представляются их статическими характеристиками по частоте и
В установившемся режиме мощности нагрузки представляются их статическими характеристиками по частоте и
Слайд 4Частота и напряжения в ЭЭС не могут оставаться постоянными, так как потребление
Частота и напряжения в ЭЭС не могут оставаться постоянными, так как потребление
Слайд 5С учетом (4.4) баланс мощностей (4.1) и (4.2) можно переписать так:
Обозначим параметры
С учетом (4.4) баланс мощностей (4.1) и (4.2) можно переписать так:
Обозначим параметры
Слайд 6При этом уравнения (4.5) и (4.6) можно представить приближенными линеаризованными зависимостями между
При этом уравнения (4.5) и (4.6) можно представить приближенными линеаризованными зависимостями между
Слайд 7С учетом того, что в исходном режиме соблюдается баланс мощности
получим систему линейных
С учетом того, что в исходном режиме соблюдается баланс мощности
получим систему линейных
Слайд 8Обобщенные статические характеристики потребления активной и реактивной мощностей для ЭЭС показаны на
Обобщенные статические характеристики потребления активной и реактивной мощностей для ЭЭС показаны на
Слайд 10Решим систему уравнений (4.7), (4.8), для этого перепишем ее в матричном виде:
Определитель
Решим систему уравнений (4.7), (4.8), для этого перепишем ее в матричном виде:
Определитель
Слайд 11умножим на неё слева обе
умножим на неё слева обе
Слайд 12По данным соотношениям можно увидеть влияние изменений генерируемых мощностей Ha изменение частоты
По данным соотношениям можно увидеть влияние изменений генерируемых мощностей Ha изменение частоты
Слайд 13Отсюда с учетом af » aU следует, что уменьшение реактивной мощности в
Отсюда с учетом af » aU следует, что уменьшение реактивной мощности в
Слайд 14В результате можно установить, какие воздействия нa режим ЭЭС следует предпринять, чтобы
В результате можно установить, какие воздействия нa режим ЭЭС следует предпринять, чтобы
Слайд 154.2. ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ ДВИГАТЕЛЕЙ
Мощности потребителей меняются в каждый момент времени. Медленные изменения
4.2. ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ ДВИГАТЕЛЕЙ
Мощности потребителей меняются в каждый момент времени. Медленные изменения
Слайд 16Рассмотрим характеристики первичных двигателей - тепловых и гидравлических турбин, определяющих изменение их
Рассмотрим характеристики первичных двигателей - тепловых и гидравлических турбин, определяющих изменение их
Слайд 18Снижение нагрузки в ЭЭС приведет к уменьшению тока в обмотках статора генератора
Снижение нагрузки в ЭЭС приведет к уменьшению тока в обмотках статора генератора
Слайд 20В случае регулируемой турбины увеличение ее скорости вращения приведет в действие автоматический
В случае регулируемой турбины увеличение ее скорости вращения приведет в действие автоматический
Слайд 21АРС, который вступает в действие с некоторым запаздыванием tзап изменит характер процесса.
АРС, который вступает в действие с некоторым запаздыванием tзап изменит характер процесса.
Слайд 23Характеристику АРС турбины часто представляют в координатах скорости и мощности генератора (рис.
Характеристику АРС турбины часто представляют в координатах скорости и мощности генератора (рис.

Слайд 254.3. ПЕРВИЧНОЕ И ВТОРИЧНОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ
Вновь рассмотрим электрическую систему, представленную эквивалентной схемой
4.3. ПЕРВИЧНОЕ И ВТОРИЧНОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ
Вновь рассмотрим электрическую систему, представленную эквивалентной схемой
Слайд 27Пусть теперь в ЭЭС происходит наброс потребляемой мощности на величину ΔР. Новой
Пусть теперь в ЭЭС происходит наброс потребляемой мощности на величину ΔР. Новой
Слайд 28Эффективность первичного регулирования частоты зависит от статизма регулятора скорости. Меньшему статизму соответствует
Эффективность первичного регулирования частоты зависит от статизма регулятора скорости. Меньшему статизму соответствует
Слайд 30АРЧ на принципе ООС воздействует непосредственно на АРС. Вторичное регулирование отражается (см.
АРЧ на принципе ООС воздействует непосредственно на АРС. Вторичное регулирование отражается (см.
Слайд 31Астатический регулятор мог бы устанавливаться на одном из агрегатов. При этом не
Астатический регулятор мог бы устанавливаться на одном из агрегатов. При этом не
Слайд 32Коэффициент крутизны характеристики регулирования равен тангенсу угла наклона характеристики АРС (рис. 4.7)
Коэффициент крутизны характеристики регулирования равен тангенсу угла наклона характеристики АРС (рис. 4.7)
Слайд 33Статизм характеристики регулятора s есть величина, обратная коэффициенту крутизны:
Астатическому регулированию отвечает значение
Статизм характеристики регулятора s есть величина, обратная коэффициенту крутизны:
Астатическому регулированию отвечает значение
Слайд 34Вторичное регулирование независимо от величины AP, обусловливает равенство Δf = 0, т.
Вторичное регулирование независимо от величины AP, обусловливает равенство Δf = 0, т.
Слайд 35Аналогично коэффициенту крутизны k, характеристики регулирования вводится понятие коэффициента крутизны статической характеристики
Аналогично коэффициенту крутизны k, характеристики регулирования вводится понятие коэффициента крутизны статической характеристики
Слайд 36Знак плюс в (4.17) означает, что с увеличением частоты (Δf > 0)
Знак плюс в (4.17) означает, что с увеличением частоты (Δf > 0)
Слайд 37Отношение (номинальной генерирующей мощности
к фактической нагрузке) называется коэффициентом резерва ρ. Таким
Отношение (номинальной генерирующей мощности
к фактической нагрузке) называется коэффициентом резерва ρ. Таким
Слайд 384.4. РЕГУЛИРОВАНИЕ ЧАСТОТЫ В ЭЭС
В реальной ЭЭС содержится большое количество параллельно работающих
4.4. РЕГУЛИРОВАНИЕ ЧАСТОТЫ В ЭЭС
В реальной ЭЭС содержится большое количество параллельно работающих
Слайд 39Просуммировав левые и правые части записанных уравнений, получим
Введем понятие средней крутизны характеристики
Просуммировав левые и правые части записанных уравнений, получим
Введем понятие средней крутизны характеристики
Слайд 40Суммарное изменение генерирующей мощности ЭЭС в результате первичного регулирования при изменении частоты
Суммарное изменение генерирующей мощности ЭЭС в результате первичного регулирования при изменении частоты
Слайд 41Наиболее просто вторичное регулирование реализуется с помощью одной станции. Такой метод называется
Наиболее просто вторичное регулирование реализуется с помощью одной станции. Такой метод называется

Слайд 43Установление номинальной частоты в ЭЭС происходит на стадии вторичного регулирования. АРЧ станции,
Установление номинальной частоты в ЭЭС происходит на стадии вторичного регулирования. АРЧ станции,
Слайд 44Для успешного регулирования частоты станция, выбираемая в ЭЭС в качестве ведущей, должна
Для успешного регулирования частоты станция, выбираемая в ЭЭС в качестве ведущей, должна
Слайд 45Ha тепловых станциях пределы изменения выдаваемой мощности определяются условиями работы котельных агрегатов
Ha тепловых станциях пределы изменения выдаваемой мощности определяются условиями работы котельных агрегатов
Слайд 46Таким образом, вследствие ограничения регулировочного диапазона тепловых электростанций, в качестве станций, ведущих
Таким образом, вследствие ограничения регулировочного диапазона тепловых электростанций, в качестве станций, ведущих
Слайд 47Опасные последствия, которые может повлечь значительное снижение частоты в ЭЭС, заставляют в
Опасные последствия, которые может повлечь значительное снижение частоты в ЭЭС, заставляют в

Слайд 494.5. ПОТРЕБИТЕЛИ РЕАКТИВНОЙ МОЩНОСТИ
Потребителями реактивной мощности в ЭЭС являются все без исключения
4.5. ПОТРЕБИТЕЛИ РЕАКТИВНОЙ МОЩНОСТИ
Потребителями реактивной мощности в ЭЭС являются все без исключения
Слайд 50В соответствии с балансом (4.2) потребление в ЭЭС реактивной мощности:
В составе нагрузки
В соответствии с балансом (4.2) потребление в ЭЭС реактивной мощности:
В составе нагрузки
Слайд 51Значительные потери реактивной мощности имеются в ЛЭП, однако зарядная мощность линий частично
Значительные потери реактивной мощности имеются в ЛЭП, однако зарядная мощность линий частично
Слайд 52Реактивная мощность нагрузок ЭЭС складывается из отдельных мощностей электроприемников:
Коэффициенты мощности и реактивной
Реактивная мощность нагрузок ЭЭС складывается из отдельных мощностей электроприемников:
Коэффициенты мощности и реактивной

Слайд 54Величина потребляемой реактивной мощности электроприемников в большей мере зависит от напряжения электрической
Величина потребляемой реактивной мощности электроприемников в большей мере зависит от напряжения электрической
Слайд 55Для поддержания нормального режима в ЭЭС потребление реактивной мощности должно обеспечиваться требуемой
Для поддержания нормального режима в ЭЭС потребление реактивной мощности должно обеспечиваться требуемой
Слайд 56В процессе проектных расчетов по определению оптимальной компенсации реактивной мощности решаются две
В процессе проектных расчетов по определению оптимальной компенсации реактивной мощности решаются две
Слайд 574.5. ВЫРАБОТКА РЕАКТИВНОЙ МОЩНОСТИ НА ЭЛЕКТРОСТАНЦИЯХ
Главным источником реактивной мощности в ЭЭС являются
4.5. ВЫРАБОТКА РЕАКТИВНОЙ МОЩНОСТИ НА ЭЛЕКТРОСТАНЦИЯХ
Главным источником реактивной мощности в ЭЭС являются
Слайд 58При работе в часы максимума реактивной нагрузки иногда необходимо понижение cosϕ генератора
При работе в часы максимума реактивной нагрузки иногда необходимо понижение cosϕ генератора
Слайд 60В соответствии с диаграммой будем иметь: - активная мощность
- реактивная мощность
В соответствии с диаграммой будем иметь: - активная мощность
- реактивная мощность
Слайд 61Векторы токов и напряжений статора в номинальном режиме равны Uг ном и
Векторы токов и напряжений статора в номинальном режиме равны Uг ном и
Слайд 62Приведенные рассуждения показывают, что при определении располагаемой реактивной мощности генератора при перевозбуждении
Приведенные рассуждения показывают, что при определении располагаемой реактивной мощности генератора при перевозбуждении
Слайд 63Все перечисленное определяет нижнюю границу тока возбуждения генератора и величины располагаемой реактивной
Все перечисленное определяет нижнюю границу тока возбуждения генератора и величины располагаемой реактивной
 Презентация на тему Циолковский
Презентация на тему Циолковский Распределенные джозефсоновские переходы
Распределенные джозефсоновские переходы Презентация на тему Культура и Цивилизация
Презентация на тему Культура и Цивилизация  Гёте
Гёте Понятие бренда
Понятие бренда Имя существительное
Имя существительное Выпускная квалификационная работа: особенности административной ответственности несовершеннолетних
Выпускная квалификационная работа: особенности административной ответственности несовершеннолетних Организация общетехникумовского мероприятия День здоровья
Организация общетехникумовского мероприятия День здоровья Об итогах работы Министерства труда и социального развития Омской области за 1 полугодие 2011 года и задачах по успешному завершени
Об итогах работы Министерства труда и социального развития Омской области за 1 полугодие 2011 года и задачах по успешному завершени ВТОРОСТЕПЕННЫЕ ЧЛЕНЫ ПРЕДЛОЖЕНИЯ.ОБСТОЯТЕЛЬСТВО.ВИДЫ ОБСТОЯТЕЛЬСТВ.
ВТОРОСТЕПЕННЫЕ ЧЛЕНЫ ПРЕДЛОЖЕНИЯ.ОБСТОЯТЕЛЬСТВО.ВИДЫ ОБСТОЯТЕЛЬСТВ. Этнический конфликт в Боснии и Герцеговине. Республика Сербская и положение энтитета на современном этапе развития
Этнический конфликт в Боснии и Герцеговине. Республика Сербская и положение энтитета на современном этапе развития Стипендии 2022-2023-1
Стипендии 2022-2023-1 lit review sample (updated) (1)
lit review sample (updated) (1) Приёмная кампания по зачислению в 1 класс на 2022-2023 учебный год
Приёмная кампания по зачислению в 1 класс на 2022-2023 учебный год Критерии выбора ИС предприятия
Критерии выбора ИС предприятия PolyMode fm
PolyMode fm презентация яр
презентация яр Креативная группа «Паприка»
Креативная группа «Паприка» Всемирный день защиты прав ребенка
Всемирный день защиты прав ребенка Флаг России
Флаг России Оформление научной статьи, курсовой работы и ВКР
Оформление научной статьи, курсовой работы и ВКР Рекламный ролик. Магазин Пятница
Рекламный ролик. Магазин Пятница Реферат по зданию Сиднейская Опера
Реферат по зданию Сиднейская Опера Творческий проект «Рай перед уроком»
Творческий проект «Рай перед уроком» «Обработка накладного кармана»
«Обработка накладного кармана» Фестиваль творчества работающей молодежи Свердловской области
Фестиваль творчества работающей молодежи Свердловской области Первые уроки экспериментальной деятельности по введению ФГОС Муниципальное образовательное учреждение общего образования «Шел
Первые уроки экспериментальной деятельности по введению ФГОС Муниципальное образовательное учреждение общего образования «Шел Торговые идеи для институциональных инвесторов на рынке фьючерсов и опционов
Торговые идеи для институциональных инвесторов на рынке фьючерсов и опционов