- Биомехатроника

Содержание
- 2. Биомехатроника– это относительно недавно возникшая наука, изучающая совместимость биологических организмов с мехатронными системами. Данное направление возникло
- 3. Кибернетические руки
- 4. Наука биомехатроника, объединившая в себе медицину и робототехнику, по праву считается одним из перспективнейших направлений Долгое
- 6. Шведско-итальянский проект Smart Hand активно работает над «обратной отдачей» киберруки. Протез сможет не только получать сигналы
- 7. Кибернетические ноги
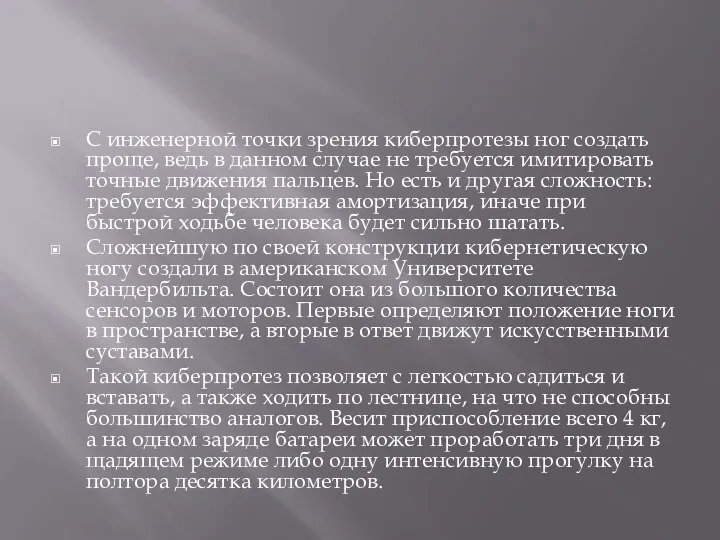
- 8. С инженерной точки зрения киберпротезы ног создать проще, ведь в данном случае не требуется имитировать точные
- 10. Кибернетические глаза
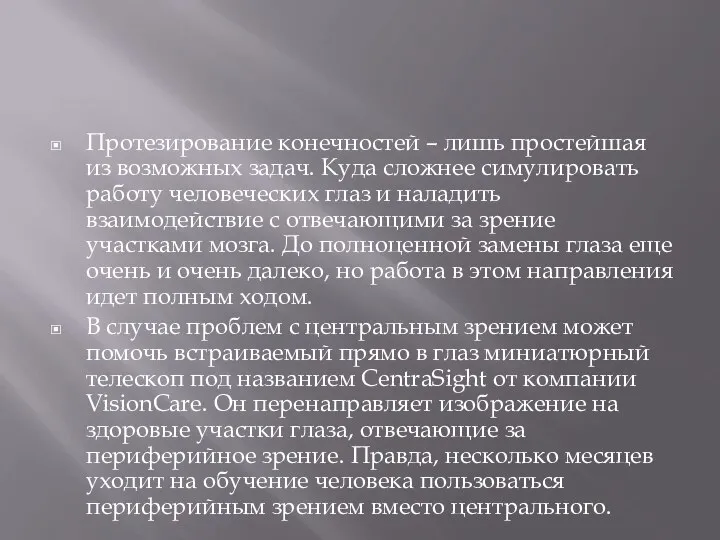
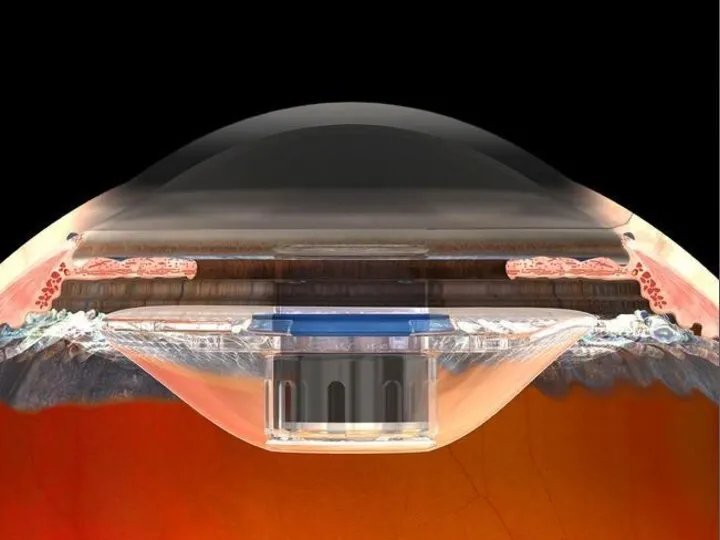
- 11. Протезирование конечностей – лишь простейшая из возможных задач. Куда сложнее симулировать работу человеческих глаз и наладить
- 13. УНИКАЛЬНЫЙ МЕДИЦИНСКИЙ РОБОТ «ДА ВИНЧИ»
- 14. Принцип работы робота прост: хирург, сидя за пультом управления, вставляет пальцы в специальные, расположенные на джойстиках,
- 16. Возможно, через 15-20 лет у нас в домах будут находиться медицинские роботы управляемые оператором и смертность
- 18. Скачать презентацию
Слайд 2Биомехатроника– это относительно недавно возникшая наука, изучающая совместимость биологических организмов с мехатронными
Биомехатроника– это относительно недавно возникшая наука, изучающая совместимость биологических организмов с мехатронными
Слайд 3Кибернетические руки
Кибернетические руки
Слайд 4Наука биомехатроника, объединившая в себе медицину и робототехнику, по праву считается одним
Наука биомехатроника, объединившая в себе медицину и робототехнику, по праву считается одним

Слайд 6Шведско-итальянский проект Smart Hand активно работает над «обратной отдачей» киберруки. Протез сможет
Шведско-итальянский проект Smart Hand активно работает над «обратной отдачей» киберруки. Протез сможет

Слайд 7Кибернетические ноги
Кибернетические ноги
Слайд 8С инженерной точки зрения киберпротезы ног создать проще, ведь в данном случае
С инженерной точки зрения киберпротезы ног создать проще, ведь в данном случае

Слайд 10Кибернетические глаза
Кибернетические глаза
Слайд 11Протезирование конечностей – лишь простейшая из возможных задач. Куда сложнее симулировать работу
Протезирование конечностей – лишь простейшая из возможных задач. Куда сложнее симулировать работу
Слайд 13УНИКАЛЬНЫЙ МЕДИЦИНСКИЙ РОБОТ «ДА ВИНЧИ»
УНИКАЛЬНЫЙ МЕДИЦИНСКИЙ РОБОТ «ДА ВИНЧИ»

Слайд 14Принцип работы робота прост: хирург, сидя за пультом управления, вставляет пальцы в
Принцип работы робота прост: хирург, сидя за пультом управления, вставляет пальцы в

Слайд 16 Возможно, через 15-20 лет у нас в домах будут находиться медицинские
Возможно, через 15-20 лет у нас в домах будут находиться медицинские
 Преступления против половой неприкосновенности и половой свободы личности
Преступления против половой неприкосновенности и половой свободы личности Трансформация в украшениях
Трансформация в украшениях Молодёжка
Молодёжка Миграции населения в современном мире Подготовила: Клеутина С.А.
Миграции населения в современном мире Подготовила: Клеутина С.А. Род имён существительных (3 класс)
Род имён существительных (3 класс) Прохождение практики в АО Национальные информационные технологии
Прохождение практики в АО Национальные информационные технологии Констит.строй 2021
Констит.строй 2021 Система добровольной сертификации в области психологии
Система добровольной сертификации в области психологии U2. L2 (2)
U2. L2 (2) Резина в дорожном строительстве – история и мировой опыт
Резина в дорожном строительстве – история и мировой опыт Естественный отбор и его математические характеристики
Естественный отбор и его математические характеристики ИНСТИТУЦИОНАЛЬНАЯ ЭКОНОМИКА
ИНСТИТУЦИОНАЛЬНАЯ ЭКОНОМИКА Моряки-подводники в Великой Отечественной войне
Моряки-подводники в Великой Отечественной войне Особенности кампании по приему отчетности за календарный 2011 год
Особенности кампании по приему отчетности за календарный 2011 год АО Райффайзенбанк. Инструкция по доставке договора клиенту
АО Райффайзенбанк. Инструкция по доставке договора клиенту Бабушкин платок
Бабушкин платок Китайская Народная Республика.
Китайская Народная Республика. Прозвенел и смолк звонок, Он позвал нас на урок!
Прозвенел и смолк звонок, Он позвал нас на урок! Презентация 11 класса МОУ « Питишевская СОШ»Классный руководитель:Сергеева Вера Никитична
Презентация 11 класса МОУ « Питишевская СОШ»Классный руководитель:Сергеева Вера Никитична узнать о расовом, национальном составе населения Африки, особенностях его размещения; рассмотреть политическую карту Африки; отра
узнать о расовом, национальном составе населения Африки, особенностях его размещения; рассмотреть политическую карту Африки; отра Москва 2006
Москва 2006 Баскетбол
Баскетбол «Путь к успеху»
«Путь к успеху» Диагностика обучающихся 1-х, 5-х, 10-х классов в условиях адаптационного процесса
Диагностика обучающихся 1-х, 5-х, 10-х классов в условиях адаптационного процесса Использование компьютерных технологий на уроках логопедии
Использование компьютерных технологий на уроках логопедии Комиссия по профориентационной работе
Комиссия по профориентационной работе Goya imágenes
Goya imágenes Импрессионизм и постимпрессионизм
Импрессионизм и постимпрессионизм