- ДОКАЗАТЕЛЬНОЕ ПРОЕКТИРОВАНИЕ РЕАКТИВНЫХ АЛГОРИТМОВ

Содержание
- 2. РЕАКТИВНЫЕ СИСТЕМЫ Под реактивными системами понимаются системы, постоянно взаимодействующие со своим окружением. Примеры таких систем системы
- 3. ФУНКЦИОНАЛЬНАЯ МОДЕЛЬ РЕАКТИВНОГО АЛГОРИТМА
- 4. ПОДХОД К ПРОЕКТИРОВАНИЮ При проектировании систем управления потенциально опасными объектами необходимо гарантировать точное соответствие алгоритма управления
- 5. ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ ФОРМАЛЬНАЯ ВЕРИФИКАЦИЯ доказывает, что полученный алгоритм обладает некоторыми свойствами,
- 6. ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ СИНТЕЗ гарантирует точное соответствие между спецификацией требований к алгоритму
- 7. ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ ДОКАЗАТЕЛЬНОЕ ПРОЕКТИРОВАНИЕ доказывается корректность всех процедур проектирования, а также
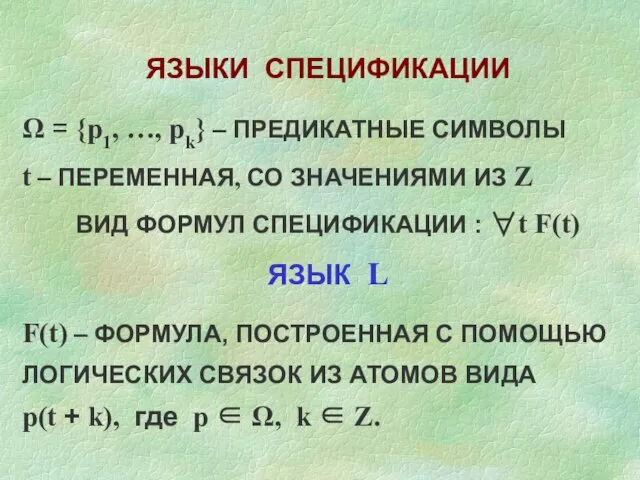
- 8. ЯЗЫКИ СПЕЦИФИКАЦИИ Ω = {p1, …, pk} – ПРЕДИКАТНЫЕ СИМВОЛЫ t – ПЕРЕМЕННАЯ, СО ЗНАЧЕНИЯМИ ИЗ
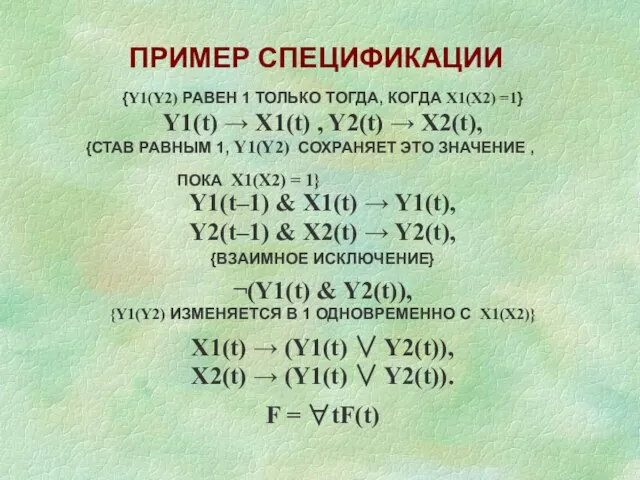
- 9. ПРИМЕР СПЕЦИФИКАЦИИ
- 10. {Y1(Y2) РАВЕН 1 ТОЛЬКО ТОГДА, КОГДА X1(X2) =1} Y1(t) → X1(t) , Y2(t) → X2(t), {СТАВ
- 11. ЯЗЫК L* ДОБАВЛЯЕТСЯ КОНСТРУКЦИЯ ∃t1(t1≤ t+k1)&F1(t1)&∀t2(t1+k2≤ t2≤ t+k3) → F2(t2), F1(t1) – ФОРМУЛА ЯЗЫКА L*, F2(t2)
- 12. СВЕРХСЛОВА ПУСТЬ σi ∈ Σ (i ∈ Z) …σ-2σ-1σ0σ1σ2… – ДВУСТОРОННЕЕ СВЕРХСЛОВО ( ΣZ ) σ1σ2…
- 13. СВЕРХСЛОВА ПУСТЬ k ∈ Z И u ∈ ΣZ k-префикс u(– ∞, k) = …σk–2σk–1σk k-суффикс
- 14. АВТОМАТЫ (X–Y) – АВТОМАТ A = , ГДЕ χA: Q × X × Y→ Q –
- 15. АВТОМАТЫ ПУСТЬ Q = {q1, …, qn} – МНОЖЕСТВО СОСТОЯНИЙ АВТОМАТА A. СЕМЕЙСТВО МНОЖЕСТВ (S1, …,
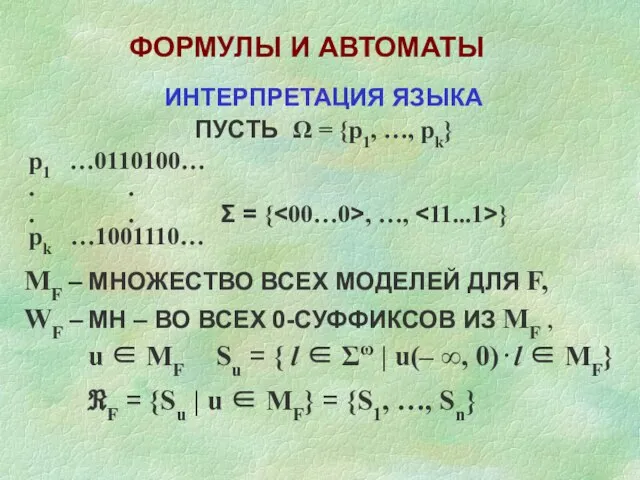
- 16. ФОРМУЛЫ И АВТОМАТЫ ИНТЕРПРЕТАЦИЯ ЯЗЫКА ПУСТЬ Ω = {p1, …, pk} p1 …0110100… . . .
- 17. ФОРМУЛЫ И АВТОМАТЫ ФОРМУЛА F = ∀tF(t) СПЕЦИФИЦИРУЕТ АВТОМАТ A, ПОВЕДЕНИЕ КОТОРОГО СОВПАДАЕТ С ℜF =
- 18. ОСНОВНЫЕ ПРОЦЕДУРЫ ПРОЕКТИРОВАНИЯ ПРОВЕРКА НЕПРОТИВОРЕЧИВОСТИ ВЕРИФИКАЦИЯ СПЕЦИФИКАЦИИ ПРЕОБРАЗОВАНИЕ СПЕЦИФИКАЦИИ ВО МНОЖЕСТВО ДИЗЪЮНКТОВ ПОСТРОЕНИЕ АВТОМАТА, ПРЕДСТАВЛЕННОГО МНОЖЕСТВОМ
- 19. ОСОБЕННОСТИ ПОДХОДА ОГРАНИЧЕННЫЙ СИНТАКСИС ЯЗЫКА СПЕЦИФИКАЦИИ ИНТЕРПРЕТАЦИЯ ЯЗЫКА НА МНОЖЕСТВЕ ЦЕЛЫХ ЧИСЕЛ ИСПОЛЬЗОВАНИЕ МОДЕЛИ НЕИНИЦИАЛЬНОГО АВТОМАТА
- 21. Скачать презентацию
Слайд 2РЕАКТИВНЫЕ СИСТЕМЫ
Под реактивными системами понимаются системы, постоянно взаимодействующие со своим окружением.
РЕАКТИВНЫЕ СИСТЕМЫ
Под реактивными системами понимаются системы, постоянно взаимодействующие со своим окружением.
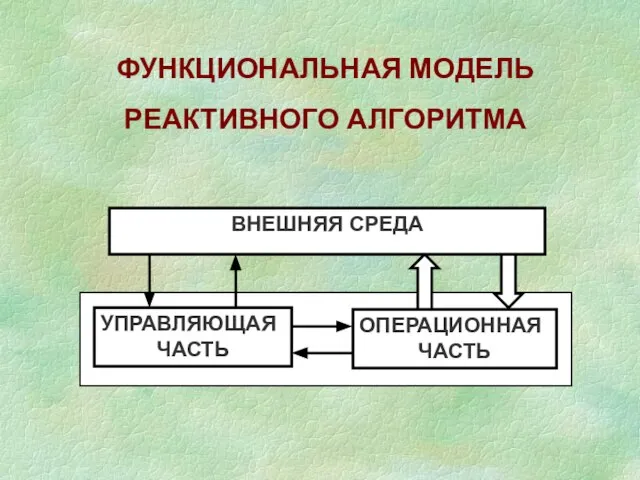
Слайд 3ФУНКЦИОНАЛЬНАЯ МОДЕЛЬ
РЕАКТИВНОГО АЛГОРИТМА
ФУНКЦИОНАЛЬНАЯ МОДЕЛЬ
РЕАКТИВНОГО АЛГОРИТМА
Слайд 4ПОДХОД К ПРОЕКТИРОВАНИЮ
При проектировании систем управления потенциально опасными объектами необходимо гарантировать
ПОДХОД К ПРОЕКТИРОВАНИЮ
При проектировании систем управления потенциально опасными объектами необходимо гарантировать
Слайд 5ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
ФОРМАЛЬНАЯ ВЕРИФИКАЦИЯ
доказывает, что полученный алгоритм
ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
ФОРМАЛЬНАЯ ВЕРИФИКАЦИЯ
доказывает, что полученный алгоритм
Слайд 6ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
СИНТЕЗ
гарантирует точное соответствие между спецификацией
ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
СИНТЕЗ
гарантирует точное соответствие между спецификацией
Слайд 7ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
ДОКАЗАТЕЛЬНОЕ ПРОЕКТИРОВАНИЕ
доказывается корректность всех процедур
ОСНОВНЫЕ ПОДХОДЫ К КОРРЕКТНОМУ ПРОЕКТИРОВАНИЮ РЕАКТИВНЫХ АЛГОРИТМОВ
ДОКАЗАТЕЛЬНОЕ ПРОЕКТИРОВАНИЕ
доказывается корректность всех процедур
Слайд 8ЯЗЫКИ СПЕЦИФИКАЦИИ
Ω = {p1, …, pk} – ПРЕДИКАТНЫЕ СИМВОЛЫ
t – ПЕРЕМЕННАЯ, СО
ЯЗЫКИ СПЕЦИФИКАЦИИ
Ω = {p1, …, pk} – ПРЕДИКАТНЫЕ СИМВОЛЫ
t – ПЕРЕМЕННАЯ, СО
Слайд 9ПРИМЕР СПЕЦИФИКАЦИИ
ПРИМЕР СПЕЦИФИКАЦИИ

Слайд 10{Y1(Y2) РАВЕН 1 ТОЛЬКО ТОГДА, КОГДА X1(X2) =1}
Y1(t) → X1(t) , Y2(t)
{Y1(Y2) РАВЕН 1 ТОЛЬКО ТОГДА, КОГДА X1(X2) =1}
Y1(t) → X1(t) , Y2(t)
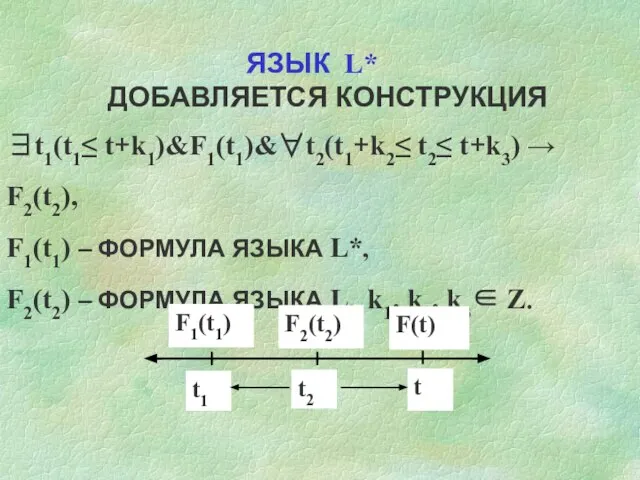
Слайд 11ЯЗЫК L*
ДОБАВЛЯЕТСЯ КОНСТРУКЦИЯ
∃t1(t1≤ t+k1)&F1(t1)&∀t2(t1+k2≤ t2≤ t+k3) → F2(t2),
F1(t1) – ФОРМУЛА ЯЗЫКА L*,
ЯЗЫК L*
ДОБАВЛЯЕТСЯ КОНСТРУКЦИЯ
∃t1(t1≤ t+k1)&F1(t1)&∀t2(t1+k2≤ t2≤ t+k3) → F2(t2),
F1(t1) – ФОРМУЛА ЯЗЫКА L*,
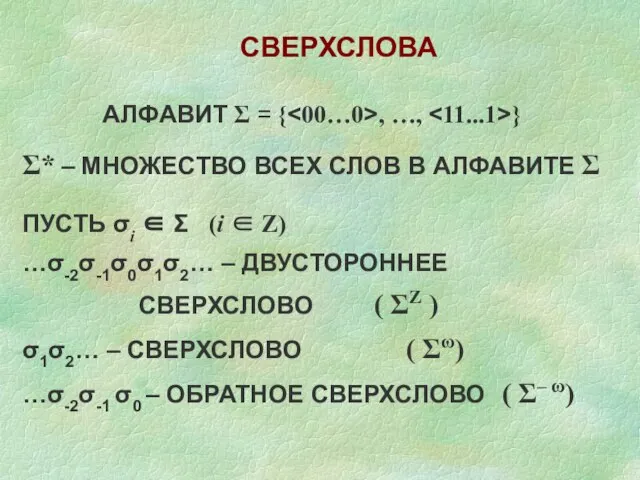
Слайд 12СВЕРХСЛОВА
ПУСТЬ σi ∈ Σ (i ∈ Z)
…σ-2σ-1σ0σ1σ2… – ДВУСТОРОННЕЕ
СВЕРХСЛОВО ( ΣZ )
σ1σ2…
СВЕРХСЛОВА
ПУСТЬ σi ∈ Σ (i ∈ Z)
…σ-2σ-1σ0σ1σ2… – ДВУСТОРОННЕЕ
СВЕРХСЛОВО ( ΣZ )
σ1σ2…
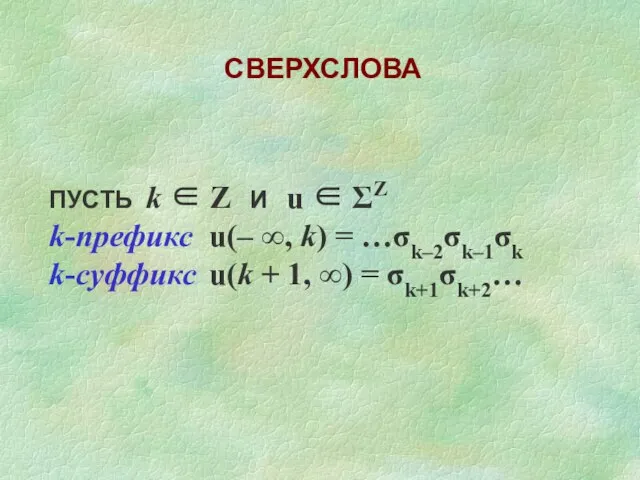
Слайд 13СВЕРХСЛОВА
ПУСТЬ k ∈ Z И u ∈ ΣZ
k-префикс u(– ∞, k) = …σk–2σk–1σk
k-суффикс u(k
СВЕРХСЛОВА
ПУСТЬ k ∈ Z И u ∈ ΣZ
k-префикс u(– ∞, k) = …σk–2σk–1σk
k-суффикс u(k
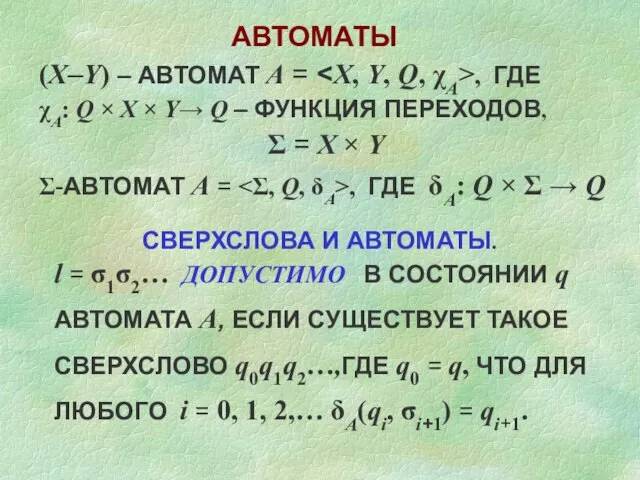
Слайд 14АВТОМАТЫ
(X–Y) – АВТОМАТ A = , ГДЕ
χA: Q
АВТОМАТЫ
(X–Y) – АВТОМАТ A =
χA: Q
Слайд 15АВТОМАТЫ
ПУСТЬ Q = {q1, …, qn} –
МНОЖЕСТВО СОСТОЯНИЙ АВТОМАТА A.
СЕМЕЙСТВО МНОЖЕСТВ
АВТОМАТЫ
ПУСТЬ Q = {q1, …, qn} –
МНОЖЕСТВО СОСТОЯНИЙ АВТОМАТА A.
СЕМЕЙСТВО МНОЖЕСТВ
Слайд 16ФОРМУЛЫ И АВТОМАТЫ
ИНТЕРПРЕТАЦИЯ ЯЗЫКА
ПУСТЬ Ω = {p1, …, pk}
p1 …0110100…
. .
. . Σ
ФОРМУЛЫ И АВТОМАТЫ
ИНТЕРПРЕТАЦИЯ ЯЗЫКА
ПУСТЬ Ω = {p1, …, pk}
p1 …0110100…
. .
. . Σ
Слайд 17ФОРМУЛЫ И АВТОМАТЫ
ФОРМУЛА F = ∀tF(t) СПЕЦИФИЦИРУЕТ АВТОМАТ A, ПОВЕДЕНИЕ КОТОРОГО СОВПАДАЕТ
ФОРМУЛЫ И АВТОМАТЫ
ФОРМУЛА F = ∀tF(t) СПЕЦИФИЦИРУЕТ АВТОМАТ A, ПОВЕДЕНИЕ КОТОРОГО СОВПАДАЕТ
Слайд 18ОСНОВНЫЕ ПРОЦЕДУРЫ ПРОЕКТИРОВАНИЯ
ПРОВЕРКА НЕПРОТИВОРЕЧИВОСТИ
ВЕРИФИКАЦИЯ СПЕЦИФИКАЦИИ
ПРЕОБРАЗОВАНИЕ СПЕЦИФИКАЦИИ ВО МНОЖЕСТВО ДИЗЪЮНКТОВ
ПОСТРОЕНИЕ АВТОМАТА, ПРЕДСТАВЛЕННОГО
ОСНОВНЫЕ ПРОЦЕДУРЫ ПРОЕКТИРОВАНИЯ
ПРОВЕРКА НЕПРОТИВОРЕЧИВОСТИ
ВЕРИФИКАЦИЯ СПЕЦИФИКАЦИИ
ПРЕОБРАЗОВАНИЕ СПЕЦИФИКАЦИИ ВО МНОЖЕСТВО ДИЗЪЮНКТОВ
ПОСТРОЕНИЕ АВТОМАТА, ПРЕДСТАВЛЕННОГО
Слайд 19ОСОБЕННОСТИ ПОДХОДА
ОГРАНИЧЕННЫЙ СИНТАКСИС ЯЗЫКА
СПЕЦИФИКАЦИИ
ИНТЕРПРЕТАЦИЯ ЯЗЫКА НА МНОЖЕСТВЕ
ОСОБЕННОСТИ ПОДХОДА
ОГРАНИЧЕННЫЙ СИНТАКСИС ЯЗЫКА
СПЕЦИФИКАЦИИ
ИНТЕРПРЕТАЦИЯ ЯЗЫКА НА МНОЖЕСТВЕ
 Еда в западной Европе в 18 веке
Еда в западной Европе в 18 веке Презентация на тему Что мы знаем о птицах?
Презентация на тему Что мы знаем о птицах?  Wild and farm animals (Дикие и домашние животные)
Wild and farm animals (Дикие и домашние животные) Отчёт заместителя директора по УВР МОУ Судниковская ООШ за первый триместр 2017-2018 учебного года
Отчёт заместителя директора по УВР МОУ Судниковская ООШ за первый триместр 2017-2018 учебного года ПОДГОТОВКА ПУБЛИЧНОГО ДОКЛАДА ДОУ
ПОДГОТОВКА ПУБЛИЧНОГО ДОКЛАДА ДОУ Базовые принципы реинжиниринга. Процессы и управление
Базовые принципы реинжиниринга. Процессы и управление Техника метания гранаты
Техника метания гранаты Развитие навыков умножения
Развитие навыков умножения История фотографии (9 класс)
История фотографии (9 класс) Сущность и основные особенности тантрического буддизма
Сущность и основные особенности тантрического буддизма Этапы компьютерного моделирования
Этапы компьютерного моделирования Мембранные технологии для решения экологических проблем
Мембранные технологии для решения экологических проблем Бизнес с Робертом Кийосаки
Бизнес с Робертом Кийосаки Симметрия - соразмерность
Симметрия - соразмерность Сюжетно-ролевая игра Магазин 2-ая подг.группа
Сюжетно-ролевая игра Магазин 2-ая подг.группа 20140521_zakirova_g.g._urok_geografii._zhivotnyy_mir_tundry
20140521_zakirova_g.g._urok_geografii._zhivotnyy_mir_tundry Презентация на тему Политическая система общества
Презентация на тему Политическая система общества Театр в картинках
Театр в картинках Презентация на тему Поисковые системы интернета
Презентация на тему Поисковые системы интернета Готовимся к государственной (итоговой) аттестации
Готовимся к государственной (итоговой) аттестации «Способы Проведения IPO в Казахстане» Шаймерден Чиканаев 30 мая 2012г.
«Способы Проведения IPO в Казахстане» Шаймерден Чиканаев 30 мая 2012г. Темперамент и характер
Темперамент и характер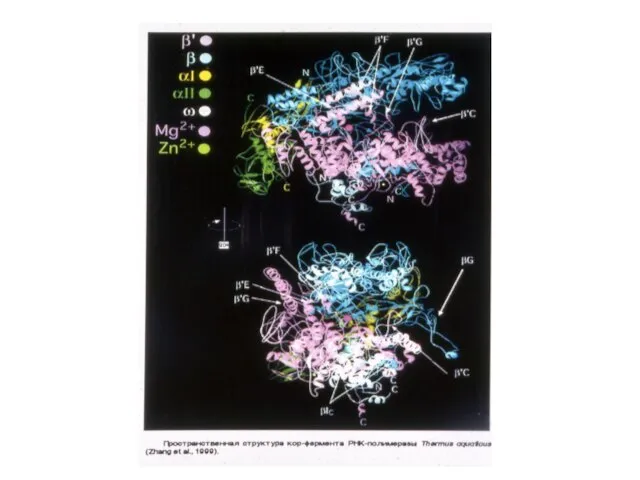 β вверху, β внизу ; α и Ω- белый; красным- кислые ак, синим-основные ак.
β вверху, β внизу ; α и Ω- белый; красным- кислые ак, синим-основные ак. Самые необычные и интересные профессии мира
Самые необычные и интересные профессии мира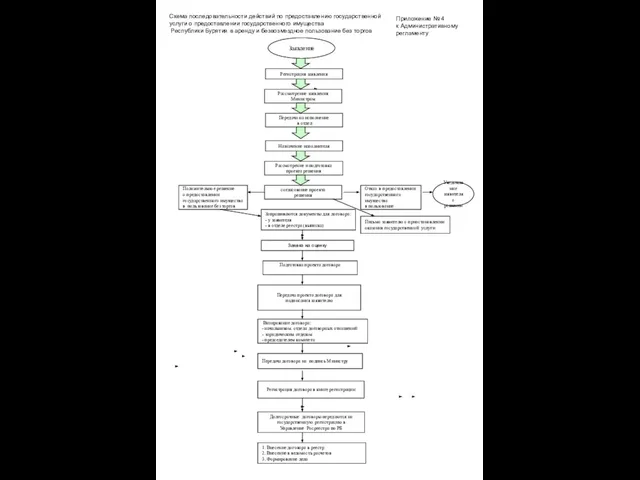 Заявление
Заявление Информация, полученная от заявителя: регистрация, методы интервьюирования и специальные процедуры для уязвимых групп
Информация, полученная от заявителя: регистрация, методы интервьюирования и специальные процедуры для уязвимых групп Современные средства связи
Современные средства связи Международный лингвистический центр
Международный лингвистический центр