- Электромагнитные соотношения

Содержание
- 2. Электромагнитный момент. Электромагнитный момент определяется: М = kФI. Таким образом, электромагнитный момент пропорционален основному магнитному потоку
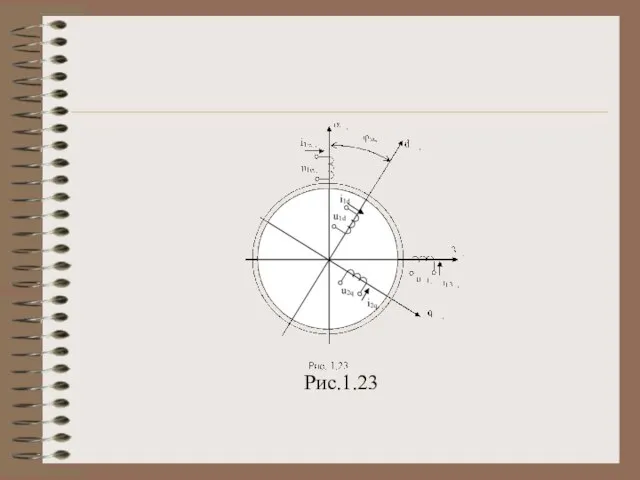
- 3. 1.8. Уравнения электромеханического преобразования энергии Рассмотрим двухфазную двухполюсную ЭМ, имеющую 2 ортогональные системы обмоток. Принята следующая
- 4. Рис.1.23
- 5. Динамика обобщенной машины описывается 4 уравнениями электрического равновесия в цепях ее обмоток и уравнением электромеханического преобразования
- 6. на основании второго закона Кирхгофа и закона Фарадея можно записать следующую систему координат для каждой из
- 7. где - закон Фарадея (наведенная ЭДС прямо пропорциональна изменению потосцепления) Уравнения (1.5) записаны для реальных напряжений,
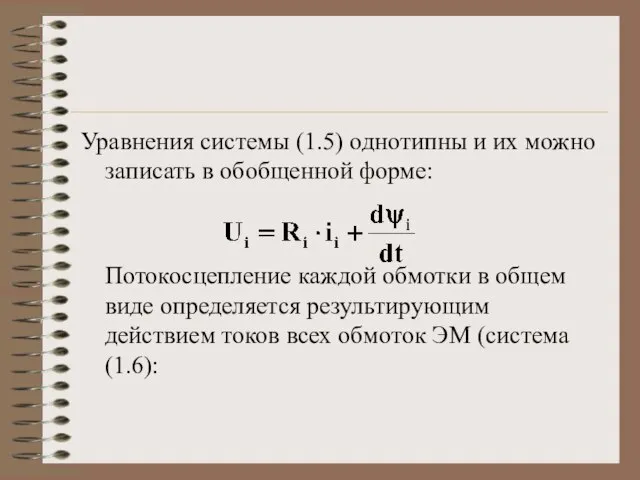
- 8. Уравнения системы (1.5) однотипны и их можно записать в обобщенной форме: Потокосцепление каждой обмотки в общем
- 9. (1.6)
- 10. В системе уравнений (1.6) первая часть индекса у индуктивности указывает в какой обмотке наводится ЭДС, а
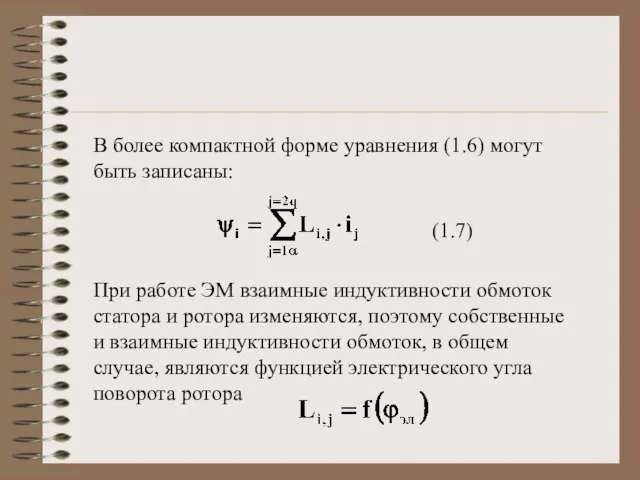
- 11. В более компактной форме уравнения (1.6) могут быть записаны: (1.7) При работе ЭМ взаимные индуктивности обмоток
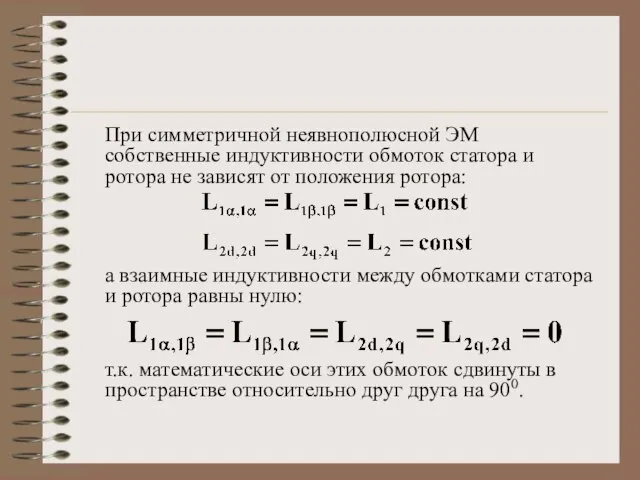
- 12. При симметричной неявнополюсной ЭМ собственные индуктивности обмоток статора и ротора не зависят от положения ротора: а
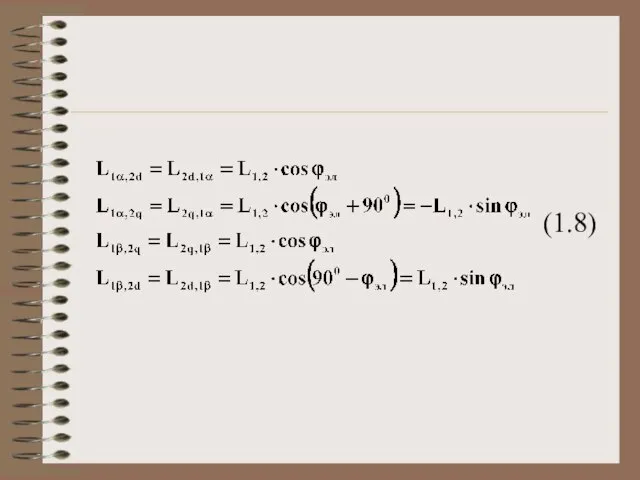
- 13. Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменения при повороте ротора на электрический угол
- 14. (1.8)
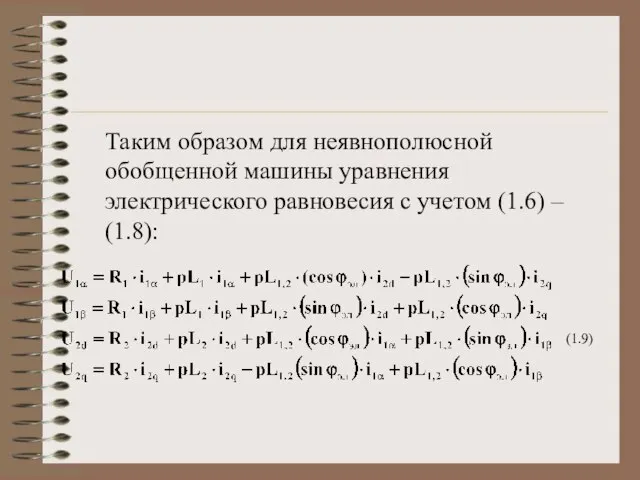
- 15. Таким образом для неявнополюсной обобщенной машины уравнения электрического равновесия с учетом (1.6) – (1.8): (1.9)
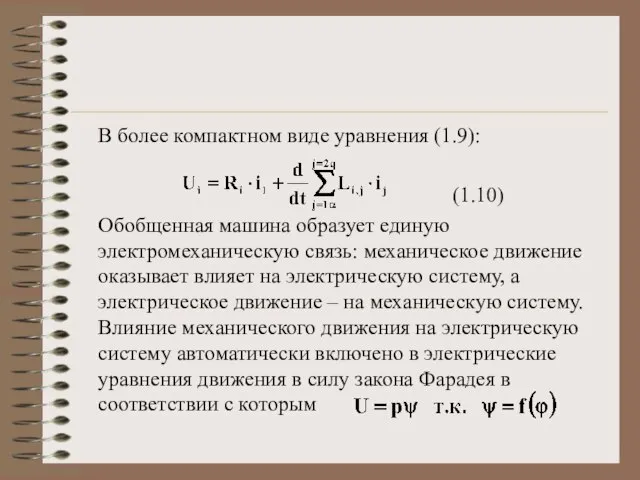
- 16. В более компактном виде уравнения (1.9): (1.10) Обобщенная машина образует единую электромеханическую связь: механическое движение оказывает
- 17. Таким образом выражение содержит напряжения, обусловленные механическим движением. Влияние электрического движения на механическое выражается в уравнении
- 18. Если валу ЭД сообщено произвольное перемещение за время dt , то на основе закона сохранения энергии:
- 19. После соответствующих преобразований последнего выражения уравнение электромагнитного момента: (1.11)
- 20. Преобразовав выражение (1.11) с помощью выражения (1.7) (1.12)
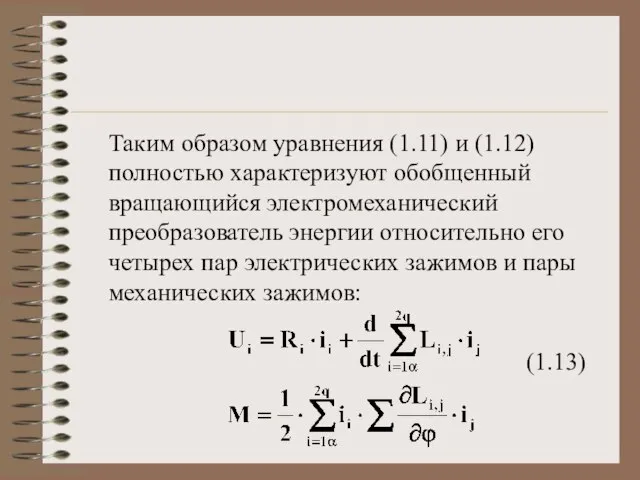
- 21. Таким образом уравнения (1.11) и (1.12) полностью характеризуют обобщенный вращающийся электромеханический преобразователь энергии относительно его четырех
- 22. Эти уравнения, записанные через действительные переменные двухфазной модели, представляют собой развернутое математическое описание динамического процесса электромеханического
- 23. Уравнения (1.13) образуют систему из 5 уравнений, устанавливающую взаимосвязь между процессами в механической и электрической частями
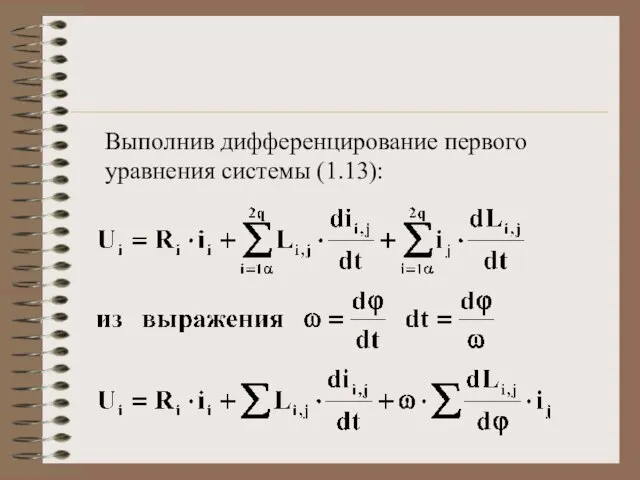
- 24. Выполнив дифференцирование первого уравнения системы (1.13):
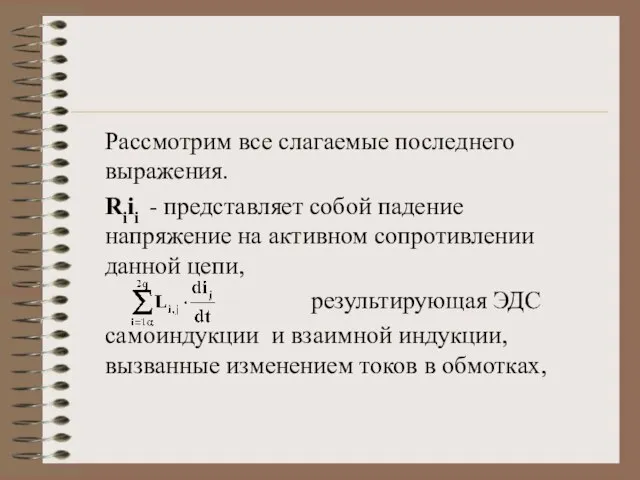
- 25. Рассмотрим все слагаемые последнего выражения. Riii - представляет собой падение напряжение на активном сопротивлении данной цепи,
- 26. - отражает взаимодействие механической и электрической частей ЭМ, т.к. представляет собой результирующую ЭДС ei , наведенную
- 27. 1.9. Параметры ЭМ Параметры ЭМ – это коэффициенты перед независимыми переменными в уравнениях, описывающих электромеханическое преобразование
- 29. Скачать презентацию
Слайд 2 Электромагнитный момент. Электромагнитный момент определяется: М = kФI.
Таким образом, электромагнитный момент пропорционален
Электромагнитный момент. Электромагнитный момент определяется: М = kФI.
Таким образом, электромагнитный момент пропорционален
Слайд 31.8. Уравнения электромеханического преобразования энергии
Рассмотрим двухфазную двухполюсную ЭМ, имеющую 2 ортогональные системы
1.8. Уравнения электромеханического преобразования энергии
Рассмотрим двухфазную двухполюсную ЭМ, имеющую 2 ортогональные системы
Слайд 4
Рис.1.23
Рис.1.23
Слайд 5 Динамика обобщенной машины описывается 4 уравнениями электрического равновесия в цепях ее обмоток
Динамика обобщенной машины описывается 4 уравнениями электрического равновесия в цепях ее обмоток
Слайд 6 на основании второго закона Кирхгофа и закона Фарадея можно записать следующую систему
на основании второго закона Кирхгофа и закона Фарадея можно записать следующую систему
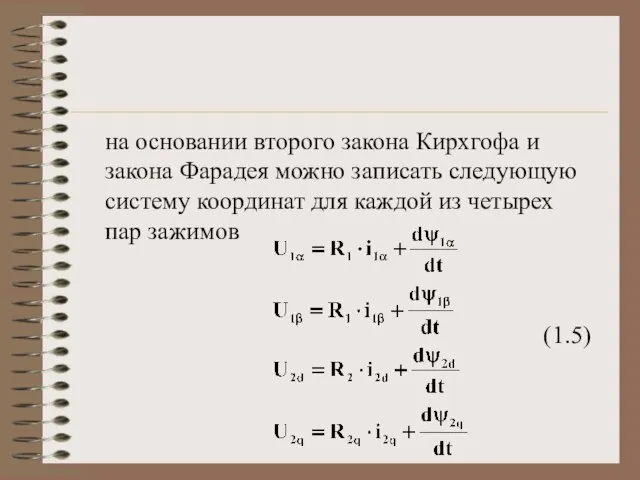
Слайд 7 где - закон Фарадея (наведенная ЭДС прямо пропорциональна изменению потосцепления)
Уравнения (1.5)
где - закон Фарадея (наведенная ЭДС прямо пропорциональна изменению потосцепления)
Уравнения (1.5)
Слайд 8Уравнения системы (1.5) однотипны и их можно записать в обобщенной форме:
Потокосцепление каждой
Уравнения системы (1.5) однотипны и их можно записать в обобщенной форме:
Потокосцепление каждой
Слайд 9
(1.6)
(1.6)
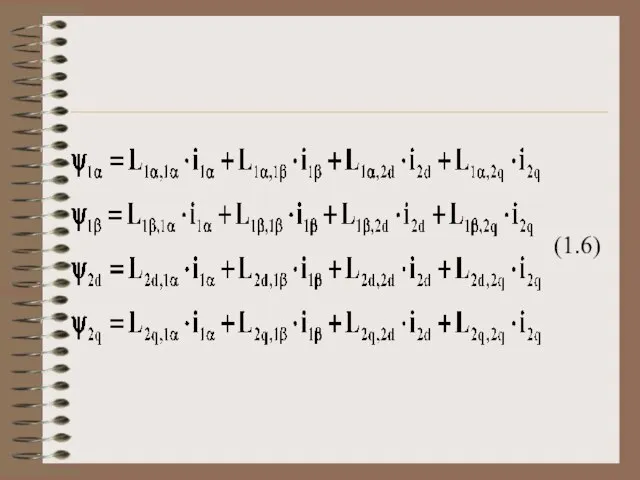
Слайд 10 В системе уравнений (1.6) первая часть индекса у индуктивности указывает в какой
В системе уравнений (1.6) первая часть индекса у индуктивности указывает в какой
Слайд 11 В более компактной форме уравнения (1.6) могут быть записаны:
(1.7)
При работе ЭМ
В более компактной форме уравнения (1.6) могут быть записаны:
(1.7)
При работе ЭМ
Слайд 12 При симметричной неявнополюсной ЭМ собственные индуктивности обмоток статора и ротора не зависят
При симметричной неявнополюсной ЭМ собственные индуктивности обмоток статора и ротора не зависят
Слайд 13 Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменения при повороте
Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменения при повороте
Слайд 14(1.8)
Слайд 15 Таким образом для неявнополюсной обобщенной машины уравнения электрического равновесия с учетом (1.6)
Таким образом для неявнополюсной обобщенной машины уравнения электрического равновесия с учетом (1.6)
Слайд 16 В более компактном виде уравнения (1.9):
(1.10)
Обобщенная машина образует единую электромеханическую связь:
В более компактном виде уравнения (1.9):
(1.10)
Обобщенная машина образует единую электромеханическую связь:
Слайд 17 Таким образом выражение содержит напряжения, обусловленные механическим движением.
Влияние электрического движения на механическое
Таким образом выражение содержит напряжения, обусловленные механическим движением.
Влияние электрического движения на механическое
Слайд 18 Если валу ЭД сообщено произвольное перемещение за время dt , то на
Если валу ЭД сообщено произвольное перемещение за время dt , то на
Слайд 19 После соответствующих преобразований последнего выражения уравнение электромагнитного момента:
(1.11)
После соответствующих преобразований последнего выражения уравнение электромагнитного момента:
(1.11)
Слайд 20 Преобразовав выражение (1.11) с помощью выражения (1.7)
(1.12)
Преобразовав выражение (1.11) с помощью выражения (1.7)
(1.12)
Слайд 21 Таким образом уравнения (1.11) и (1.12) полностью характеризуют обобщенный вращающийся электромеханический преобразователь
Таким образом уравнения (1.11) и (1.12) полностью характеризуют обобщенный вращающийся электромеханический преобразователь
Слайд 22 Эти уравнения, записанные через действительные переменные двухфазной модели, представляют собой развернутое математическое
Эти уравнения, записанные через действительные переменные двухфазной модели, представляют собой развернутое математическое
Слайд 23 Уравнения (1.13) образуют систему из 5 уравнений, устанавливающую взаимосвязь между процессами в
Уравнения (1.13) образуют систему из 5 уравнений, устанавливающую взаимосвязь между процессами в
Слайд 24 Выполнив дифференцирование первого уравнения системы (1.13):
Выполнив дифференцирование первого уравнения системы (1.13):
Слайд 25 Рассмотрим все слагаемые последнего выражения.
Riii - представляет собой падение напряжение на активном
Рассмотрим все слагаемые последнего выражения.
Riii - представляет собой падение напряжение на активном
Слайд 26
- отражает взаимодействие механической и электрической частей ЭМ, т.к. представляет собой
- отражает взаимодействие механической и электрической частей ЭМ, т.к. представляет собой
Слайд 271.9. Параметры ЭМ
Параметры ЭМ – это коэффициенты перед независимыми переменными в уравнениях,
1.9. Параметры ЭМ
Параметры ЭМ – это коэффициенты перед независимыми переменными в уравнениях,
 Летняя коллекция Экостиль
Летняя коллекция Экостиль Охрана редких растений – наше общее дело. Вы согласны?
Охрана редких растений – наше общее дело. Вы согласны? Закон, по которому ты живешь
Закон, по которому ты живешь Маркетинг-план
Маркетинг-план Typemaster Presentation
Typemaster Presentation День рождения Дедушки Мороза
День рождения Дедушки Мороза 30 апреля – 5 мая 2012 года
30 апреля – 5 мая 2012 года Устный
Устный Презентация на тему Насекомые (1 класс)
Презентация на тему Насекомые (1 класс) ОТЧЕТ Главы городского округа Отрадный по итогам 2011 года
ОТЧЕТ Главы городского округа Отрадный по итогам 2011 года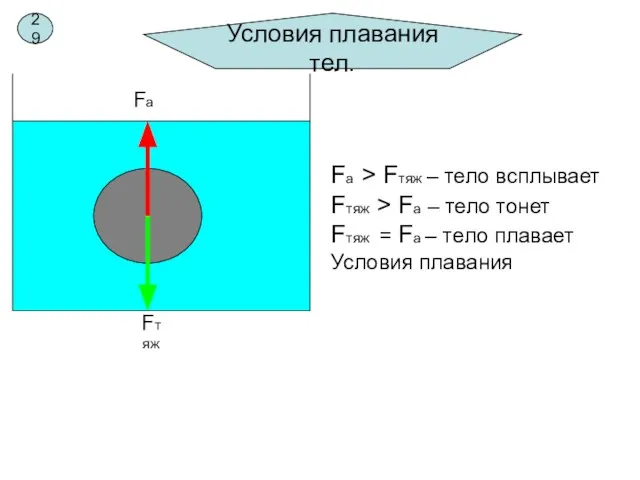 Условия плавания тел.
Условия плавания тел. Гражданское общество и государство. Гражданское общество
Гражданское общество и государство. Гражданское общество Театральные декорации
Театральные декорации Презентация на тему Профессия Экономист
Презентация на тему Профессия Экономист  День Победы Военная техника
День Победы Военная техника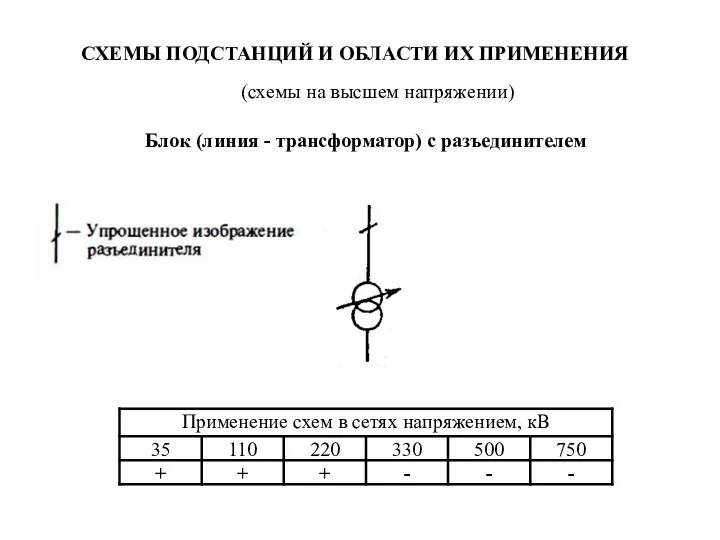 Схемы подстанций и области их применения
Схемы подстанций и области их применения Конкурентная война
Конкурентная война Приглашение к участию в тендере ГК «АвтоСпецЦентр»
Приглашение к участию в тендере ГК «АвтоСпецЦентр» Системы норм римского частного права
Системы норм римского частного права  Поле Русской славы Дню защитника Отечества посвящается Мероприятие подготовил и провел Преподаватель-организатор ОБЖ Трофимчук
Поле Русской славы Дню защитника Отечества посвящается Мероприятие подготовил и провел Преподаватель-организатор ОБЖ Трофимчук  Организация и проведение ВПР осенью 2020 года
Организация и проведение ВПР осенью 2020 года Беседы о русской стилистике и культуре речи
Беседы о русской стилистике и культуре речи НОРМАТИВНЕ І ПРОГРАМОВЕ ВРЕГУЛЮВАННЯ ЗМІСТУ ОСВІТНЬОЇ РОБОТИ З ДІТЬМИ ДОШКІЛЬНОГО ВІКУ
НОРМАТИВНЕ І ПРОГРАМОВЕ ВРЕГУЛЮВАННЯ ЗМІСТУ ОСВІТНЬОЇ РОБОТИ З ДІТЬМИ ДОШКІЛЬНОГО ВІКУ Личностно-ориентированное обучение в начальной школе
Личностно-ориентированное обучение в начальной школе Кошки и мы
Кошки и мы Управління грошовими потоками підприємства
Управління грошовими потоками підприємства Феодальная раздробленность на Руси 6 класс
Феодальная раздробленность на Руси 6 класс Проверочная работа5 класс
Проверочная работа5 класс