- Горные машины и оборудование. Курс лекций

Содержание
- 2. занных между собой по своим техническим параметрам так, что обеспечива- ют рациональное производство всех работ этого
- 3. вых двигателей при добыче полезных ископаемых известно с ХVIII-го века. В этот же период, и особенно,
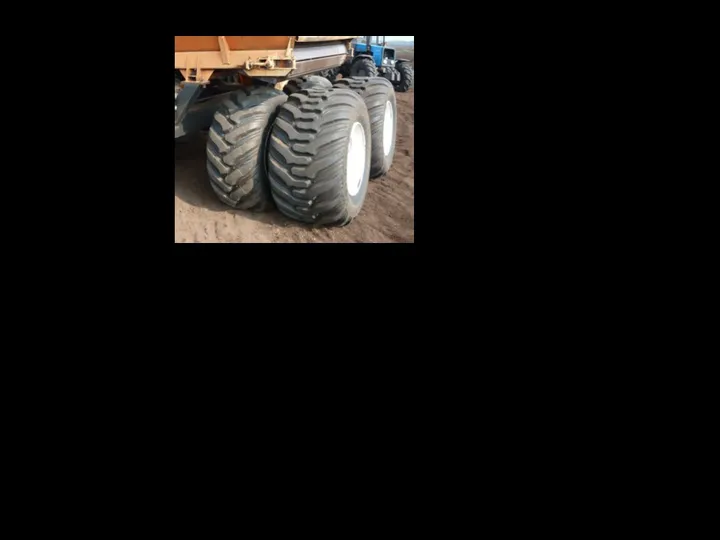
- 4. Рисунок 1.2 – Уборочный машинно-тракторный агрегат на технологической площадке разрабатываемого торфяного месторождения Рисунок 1.3 - Погрузка
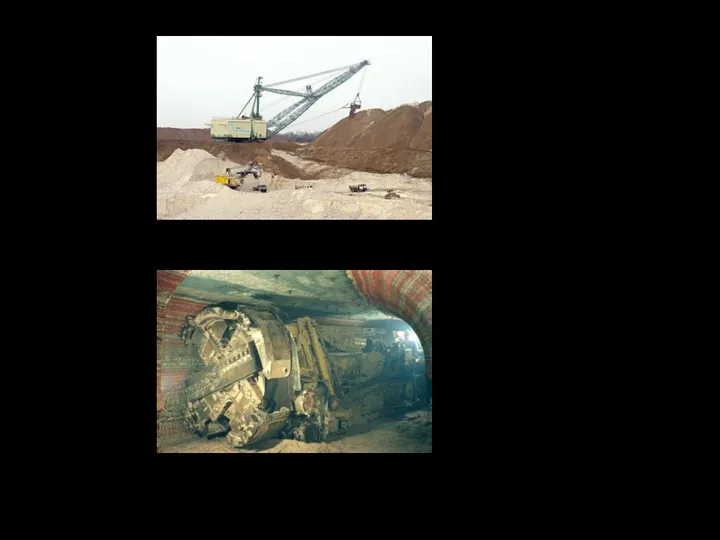
- 5. Рисунок 1.4 – Технологический комплекс машин на карьере по добыче мела Рисунок 1.5 – Проходческий комбайн
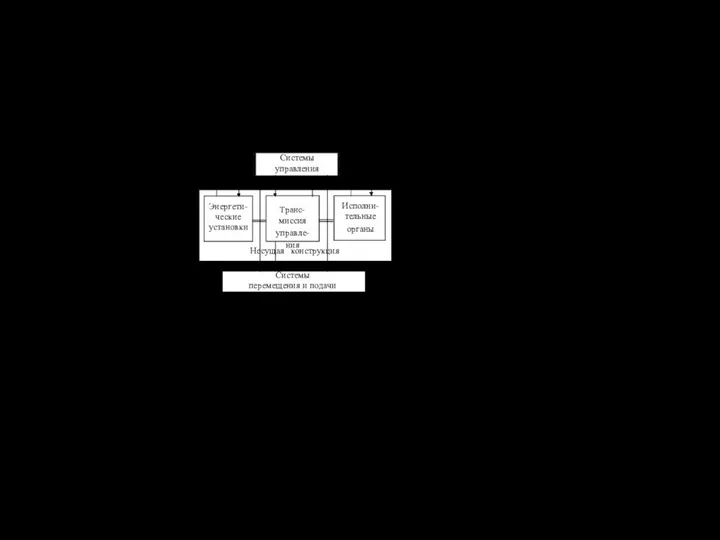
- 6. 1. ОБЩАЯ СТРУКТУРА И ОСНОВЫ УСТОЙЧИВОСТИ ГОРНЫХ МАШИН 1.1 Современная структура горных машин и требования к
- 7. требования включают санитарно-гигиенические условия работы персонала, его безопасность, комфортность труда, лёгкость и удобство управления. Эко- логические
- 8. Таблица 1.1 – Категории горных пород в зависимости от коэффициента кре- пости Категория Степень крепости Примеры
- 9. μ - коэффициент Пуассона. Помимо модуля упругости часто используется такая характеристика горных пород, как модуль G
- 10. обычно определяют таблицей косинусов между осями подвижной и непо- движной систем декартовых координат. Углы Эйлера введем
- 11. Аналогично m n x sin 0cos 0 1 0 cos0 sin a к n Z θ
- 12. (1.8) и (1.9) найти проекции сил на оси другой системы. Возможны и другие варианты таблицы направляющих
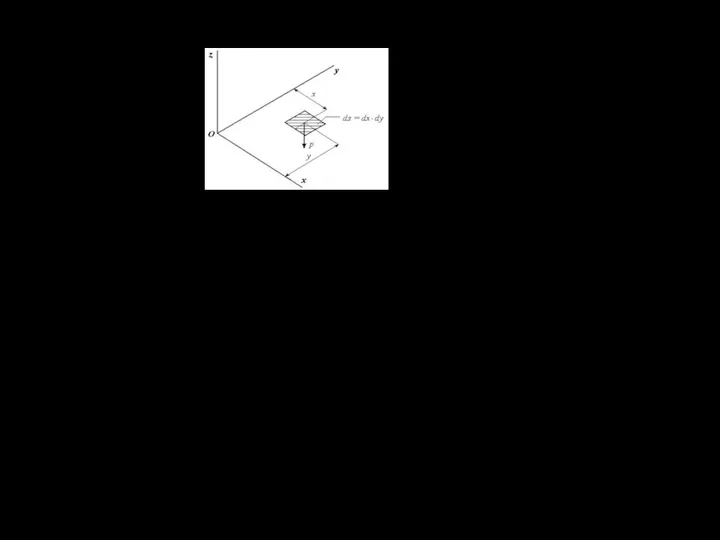
- 13. которой определяется выражением ∫∫ ∫∫ ⋅ ⋅ ⋅ ∂= S S pds rpds Иначе, центр давления
- 14. Интеграл, стоящий в знаменателе выражений (1.13), есть общая сила давления машины на несущее основание z S
- 15. системе осей Oxyz, связанной с машиной. В ряде машин, предназначенных для рытья осушительных каналов или планирования
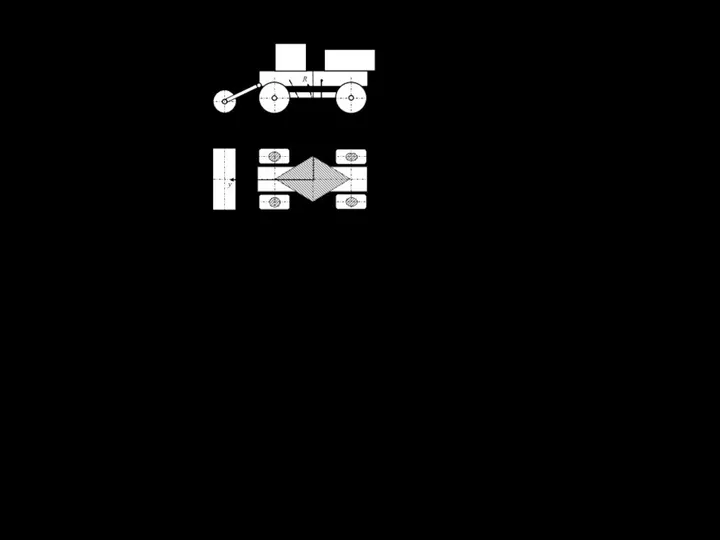
- 16. Рисунок 1.5 – К определению допустимого положения центра давления: Д - допустимое положение центра давления; Д’
- 17. жена на опорной поверхности, наклоненной под углом φ к горизонту и нагружена внешними силами, равнодействующая которых
- 18. Рис. 1.6,б – Крен шагающего экскаватора на откосе мелового карьера в период весенней распутицы
- 19. Из этого соотношения может быть найдено максимальное положение центра масс () ⋅ ⋅ ⋅ (ϕ+γ) ⋅−
- 20. Подставив в (1.22) значение Му и разрешив его относительно zc, имеем ( ) () (αβ) θβ
- 21. 2. ОСНОВЫ ТЕОРИИ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ 2.1 Способы разрушения горных пород Первичное взаимодействие горной
- 22. ды, материала резца и т. п. для наиболее часто применяемых резцов с линей- ной режущей кромкой
- 23. h0,33 e ep p ′ = . (2.2) Эта формула является обобщённой формул Зворыкина К.И. и
- 24. стиками являются математическое ожидание и среднеквадратическое откло- нение, которое определяется статистической обработкой экспериментальных и опытных данных.
- 25. Если сравнить формулы (2.3) и (2.4) и положить, что удельное сопро- тивление резанию изменяется в зависимости
- 26. Pp⋅dS=ep⋅F⋅dS, (2.8) или dE=ep⋅dV, тогда dV dE ep= , (2.9) где Е – энергия, затрачиваемая на
- 27. lp - ширина рабочей кромки резца, м; hcp, tcp - средняя толщина (глубина) и ширина (шаг
- 28. 2.3 Геометрические и кинематические характеристики взаимодействия режущих элементов горных машин с породой В горных машинах для
- 29. Таблица 2.1 – Классификация движений исполнительных органов № п/п Число простых движений Типы простых движений Примеры
- 30. Обозначим через v переносную скорость движения исполнительного органа, а через u относительную скорость движения резцов и
- 31. ментов фрезы за время ее поворота на угол φ между двумя смежными резца- ми в линии
- 32. За это время фреза перемещается в направлении скорости v на расстоя- ние =vω⋅z λ 2π. (2.19)
- 33. В первом случае ϕ ϕ s hDd к =∫ ⋅ 02 , (2.23) где ϕ ω
- 34. b0=b+2h⋅tgα. (2.30) где α - угол развала бороздки. Рисунок 2.12 – К определению ширины захвата резца
- 35. Рисунок 2.13,б – Траектории движения режущих элементов исполнительного органа бурового типа Определяя толщину стружки, снимаемую резцами,
- 36. можно принимать толщину стружки постоянной для всех резцов в линии ре- зания и определять ее по
- 37. z – среднее число резцов в линиях резания шнек-фрезы второго типа, или число заходов шнек-фрезы с
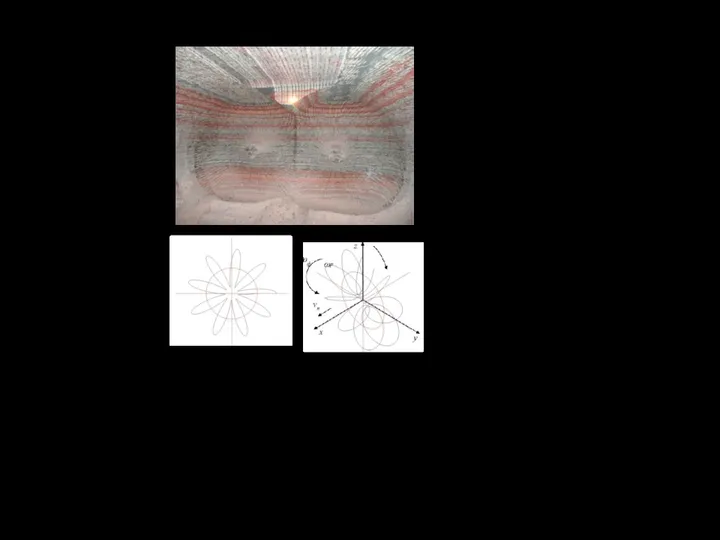
- 38. Рисунок 2.16 (б,в) – Форма забоя и траектории движения резцов планетарно-дискового исполнительного органа Третья составляющая скорости
- 39. где величины v, ω2, z2 имеют тот же смысл, что и в формулах (2.26) и (2.27).
- 40. 3. УРАВНЕНИЯ ДВИЖЕНИЯ ГОРНЫХ МАШИН 3.1 Способы составления уравнений движения Прогнозирование состояния горной машины, а также
- 41. используются для изучения динамических процессов работы горных машин. Изучение стационарных режимов работы, т. е. режимов работы
- 42. 3.2 Основные методы исчисления производительности и потребляемой мощности Мощность энергетических установок горных машин, а также их
- 43. V V Kp=p ; pKp ρ ρ= , (3.8) где Vp - объём породы после её
- 44. где dн - наружный диаметр витков транспортирующей части шнек-фрезы; dв - диаметр корпуса транспортирующей части шнек-фрезы;
- 45. 4. МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ ГОРНЫХМАШИН И ПОДАЧИ ИХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ НА ЗАБОЙ 4.1 Общие сведения Для большинства
- 46. Как большое разнообразие условий работ горных машин, так и огром- ное число конструкций их движителей не
- 47. Если движитель скользит относительно опорной поверхности , то каса- тельное напряжение между ними с учетом его
- 48. Более подробно характер распределения давлений и деформаций дви- жителя и опорного основания рассматривается в разделах, посвященных
- 49. Обозначив через l1′ и l2″ смещения контактирующих точек движителя и опорного основания в плоскости последнего, запишем
- 50. При использовании для вычисления силы трения формулы (4.9) необ- ходимо иметь в виду, что усредненное значение
- 51. и будем пользоваться ею при определении силы трения между ходовыми устройствами горных машин и несущими основаниями.
- 52. 4.3 Колесные опорно-ходовые устройства горных машин 4.3.1 Колесо транспортного средства Колесо транспортного средства – элемент движителя,
- 53. 4.3.2 Комплектность и устройство шины Пневматические шины являются одним из основных элементов колес. В процессе эксплуатации
- 54. 4.3.3 Конструкции шин По типу конструкции различают диагональные и радиальные шины. ДИАГОНАЛЬНЫЕ В каркасе диагональных шин
- 55. 4.3.4 Обозначение и назначение шин 1 – товарный знак предприятия-изготовителя; 2 – фирменное обозначение; 3 –
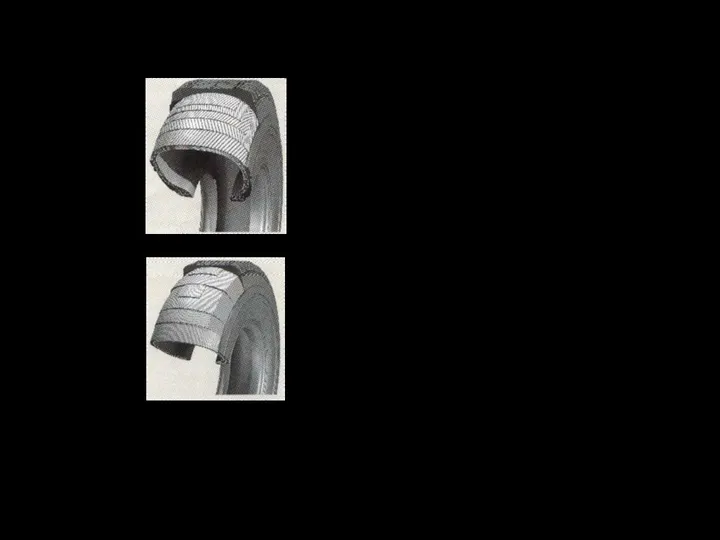
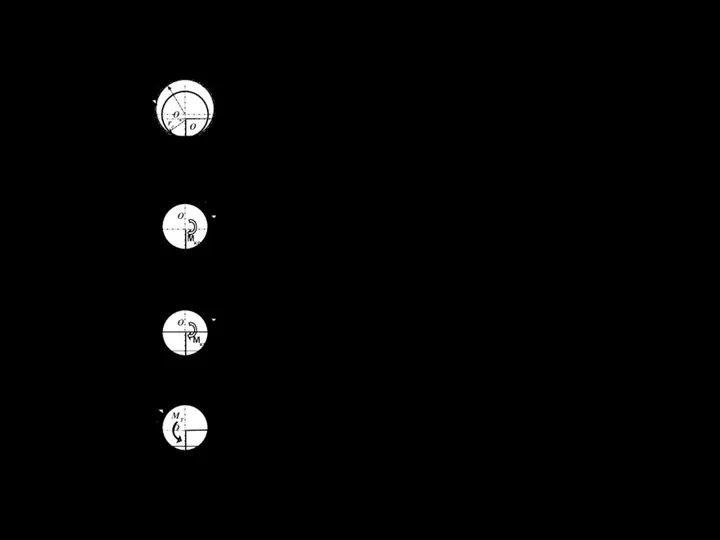
- 56. 4.3.5 Режимы движения колеса ВЕДОМЫЙ rк w О – ось вращения колеса; Ок- ось условного колеса
- 57. 4.3.6 Особенности и режимы движения колес Колесные движители в виду их распространения во всех сферах народ-
- 58. rc - свободный радиус колеса – радиус колеса при номинальном давле- нии воздуха в шине; rcm
- 59. Более строго радиус качения определяется посредством, так называе- мого, радиуса свободного качения. Под этим радиусом понимается
- 60. 4.3.7 Сопротивление движению колесных движителей Как уже указывалось, при оценке взаимодействия движителей с опор- ными основаниями
- 61. Величина коэффициентов fк′ и fк″, а также соотношение между ними зависит прежде всего от физико-механических свойств
- 62. Рисунок 4.6 – Контакт колеса с рельсом: а) – основные геометрические размеры; б) – форма пятна
- 63. Рисунок 4.7 – Взаимодействие жесткого колеса с деформируемым основанием Жесткие колеса применяются в качестве элементов опорно-ходовых
- 64. ∫ ∫∫ == s н z s н y z y к pdS pdS P P
- 65. Учитывая, что (4.35) дает несколько завышенные значения fк целесооб- разно это учитывать поправочным коэффициентом kf и
- 66. Рисунок 4.8 – Взаимодействие пневматического колеса с деформируемым несущим основанием Максимальная нормальная деформация несущего основания может
- 67. Эта формула предложена проф. Ф.А. Опейко [ ] для определения де- формаций торфяных залежей под колесными
- 68. Рис. 4.9 - Расчетная схема двухосной машины Эти условия записываются в виде ∑ = = n
- 69. поверхность. Выполнение этого условия обеспечивается тогда, когда центр давления находится в пределах ядра сечения опорной поверхности.
- 70. к z дм к z дм к z dS Px аS Py S P ⋅ ⋅
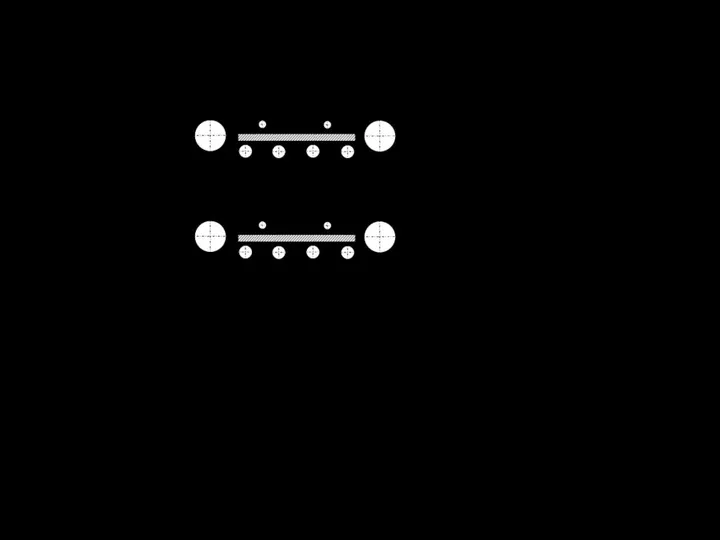
- 71. Рис. 4.10 - Ядра сечения трехосной (а) и четырехосной (б) машин – для четырехосной машины Ix
- 72. Суммарные реакции на колеса переднего и заднего мостов a y Rп=Pz0⋅д; a ay Rз=Pz0⋅−д, (4.55) где
- 73. Определим размеры пятна контакта колеса, считая, что величины Pzi определены. Площадь пятна контакта колеса с опорным
- 74. 4.3.9 Мощность для передвижения колесного движителя Необходимая для передвижения горной машины на колесном ходу мощность вычисляется
- 75. Рисунок 4.12 – Определение составляющей силы тяжести, параллельной опорной поверхности 4.3.10 Условия возможности передвижения машины на
- 76. Эти условия передвижения далеко не единственные, но, как правило, они должны соблюдаться во всех случаях. Представляет
- 77. где v – продольная составляющая скорости точки машины, лежащей на её продольной оси; α – средний
- 78. Рисунок 4.13 – Основные системы поворота колесных машин: а) – за счёт поворота колес; б) –
- 79. Рисунок 4.14 - Вагон самоходный 5ВС15М (схема «краб») Рисунок 4.15 - Самоходный вагон В15К (схема 6х3)
- 80. 4.4 Гусеничные движители 4.4.1 Принципиальные схемы и принцип действия В горных мобильных машинах гусеничные движители –
- 81. Теоретическая скорость vT равна скорости перематывания гусеничных цепей vT=u, где u=ωзв⋅rзв; ωзв – угловая скорость ведущей
- 82. где fд – коэффициент сопротивления деформированию несущего основания. Этот коэффициент в свое время проф. Ф.А. Опейко
- 83. 4.4.3 Коэффициент сопротивления деформации несущего основания Так, например, коэффициент fд сопротивления деформированию опор- ного основания зависит
- 84. ( ) a z a h fд=+−1λ, (4.80) где z – число опорных катков; λ –
- 85. где σz и σу – проекции напряжения, действующего на гусеницу; Pz - нормальная к опорной поверхности
- 86. Для жесткого одноопорного движителя моменты сопротивления опор- ной площади с учетом того, что давление по ширине
- 87. У двухопорного жесткого гусеничного движителя давление изменяется как по длине, так и по ширине гусениц, а
- 88. Максимальная и минимальные деформации соответственно max3 2 2maxE ab p h г = ⋅ ; h2minpEmin3ab2
- 89. fpab dt dv 2fд′⋅p⋅a⋅b+P3+m⋅g⋅sinϕ+C1⋅m2 ⋅ ⋅ ⋅, (4.95) где f – коэффициент сцепления (трения) между гусеницами
- 90. Для определения радиуса и угловой скорости поворота машины рас- смотрим её движение как сложное, состоящее из
- 91. проф.Ф.А. Опейко доказал в математической теории трения [ ]. Действи- тельно, выражая проекцию скорости какой-либо точки
- 92. =∫∫ 1 1 1 S Tx dTx; =∫∫ 2 2 2 S Tx dTx; =∫∫ 1
- 93. Тогда уравнения равновесия имеют вид ( ) ( ) ( ) (3 ) 0 3 3
- 94. 0 9 23 13 9 2 2 2 0 2 0 2 0 = + −
- 95. ( ) ( ) ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + ⋅ − +
- 96. Т1б, Т2б – арифметические суммы боковых сил, действующих на гусенич- ные цепи; k′ - коэффициент сопротивления
- 97. Последние формулы следуют из уравнений равновесия (4.99) двухгу- сеничной машины при повороте и упрощены путем пренебрежения
- 98. Отношение 2 2 2 2 2 2 2 2 2 9 39 =ρ + + +
- 99. 4.5 Шагающие механизмы перемещения Появление таких необычных и экзотических механизмов передвижения горных машин обусловлено, прежде всего,
- 100. л б лF R p =2 , (4.117) где R – радиус опорной базы; Rл –
- 101. Для шагающих экскаваторов-драглайнов вопросы устойчивости имеют особо важное значение, так как эти машины часто работают на
- 102. где л c A l mgl R= ⋅ ⋅ - сила давления базы на несущее основание;
- 103. 4.6 Автономные и специальные механизмы подачи Как уже отмечалось, у многих горных машин механизмы подачи сов-
- 104. cos 2 22 vт γ=vn+ωp⋅lp, (4.122) где vт - скорость каната тяги; β - угол между
- 105. где ep - удельное сопротивление резанию (удельное сопротивление копа- нию). Примером организации подачи исполнительного органа являются
- 106. б) Рисунок 4.28 – Одношнековый очистной комбайн Канатные и цепные системы подачи очистных машин являются выне-
- 107. 5.1 Моделирование отвалообразователя Для моделирования отвалообразователя принимаем следующие допу- щения. 1. Отвалообразователь – динамическая система, состоящая
- 108. Возьмем углы ψ, ϕ, θ за обобщенные координаты. Тогда ψ, ϕ, θ - обобщенные координаты. Квазискорости
- 109. h=h0+r⋅cosα⋅tgθ, где θ – угол крена базы. R h h tg 2 θ=max−min; 2 maxmin 0
- 110. π (ν)πθ (ν)θ θ π tgRE tg R E RtgKh R 3 2 2 4 4
- 111. 6. МАШИНЫ ДЛЯ ПОДГОТОВКИ ТОРФЯНЫХ МЕСТОРОЖДЕНИЙ И РЕМОНТА ТЕХНОЛОГИЧЕСКИХ ПЛОЩАДЕЙ № п/п Наименование технологической операции Марка
- 112. 6.1 Одноковшовые экскаваторы 6.1.1 Экскаватор с механическим приводом 6 8 9 3 4 5 7 11
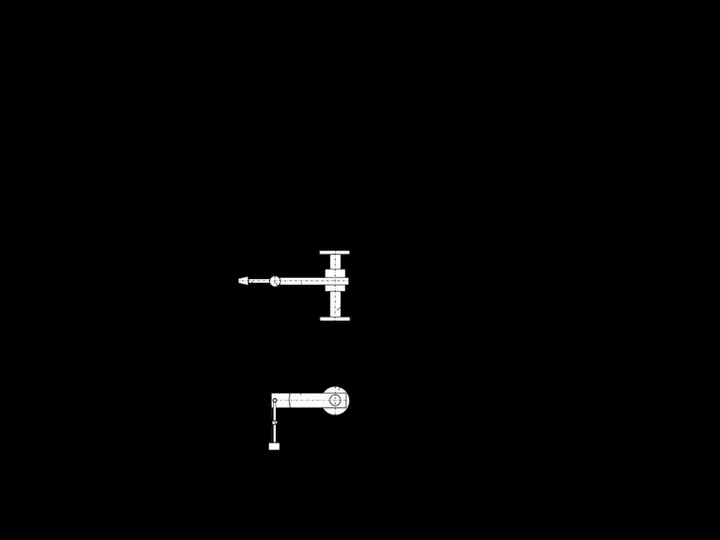
- 113. 6.1.3 Мощность для привода тяговой лебедки экскаватора Рис. 6.1.3. Расчетная схема к определению тягового усилия Во
- 114. 6.2 МАШИНЫ ДЛЯ СВОДКИ ЛЕСА, РАЗДЕЛКИ, ПОГРУЗКИ И ВЫВОЗКИ ДРЕВЕСИНЫ 6.2.1 Машины для сводки леса Наибольшее
- 115. 6.2.2 Валовая производительность машины для сводки леса Валовая производительность машины для сводки леса: Qc.л=(0,36⋅Вп⋅2πR(α/360)K1K2K3)/T, га/час где
- 116. 6.2.3 Энергия, необходимая для спиливания дерева При спиливании дерева источником энергии является двигатель, а также накопленная
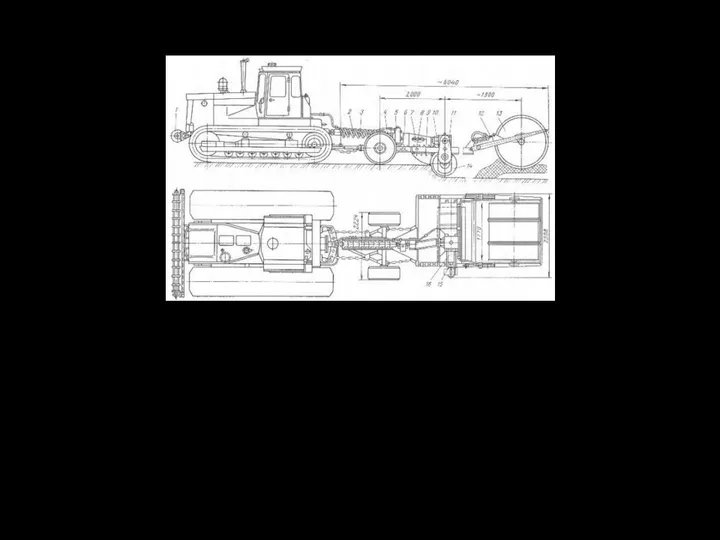
- 117. 6.3 Машины для глубокого фрезерования залежи с древесиной Рабочим органом является горизонтальная фреза, на боковой поверхности
- 118. 1 – передний отвал; 2 – ограждение; 3, 7. 15 – карданные валы; 4 – колесная
- 119. 6.4. Канавные машины непрерывного действия 6.4.1.Определение рабочей скорости многоковшового экскаватора для рытья картовых канав Исходные данные:
- 120. Решение: Уравнение баланса мощности при работе многоковшового экскаватора во время рытья осушительного канала с одновременным транспортировани-
- 121. 3. Мощность на работу горизонтального ленточного конвейера 3 31000η fкqLvк N= , кВт где fк= (0,30…0,35)
- 122. 6.4.2 Канавные машины с конусной фрезой Для рытья и углубления картовых канав применяются машины непрерывного дей-
- 123. а – вид сбоку; б – вид сзади; 1 – конусная фреза; 2 – опорная лыжа;
- 124. Таблица 6.4.2 - Техническая характеристика канавных машин № Наименование показателя МТП-32А МТП-32Б 1 2 3 4
- 125. 6.4.3 Условие достаточности производительности конусной фрезы Производительность фрезы по ходу агрегата определим как произведение площади поперечно-
- 126. 6.4.4 Мощность для работы канавной машины с конусной фрезой Суммарная мощность, необходимая для работы машины с
- 127. 6.5 МАШИНЫ ДЛЯ РЕМОНТА ОСУШИТЕЛЬНОЙ СЕТИ 6.5.1 Шнеко-роторная машина для ремонта картовых канав Содержание в рабочем
- 128. 6.5.2 Производительность ротора шнеко-роторной машины Для нормальной работы каналоочисти- тельной машины должны соблюдаться два условия достаточности
- 129. 6.5.3 Скорость частиц при сходе с лопаток. Дальность бросания Для разжиженной торфяной массы силы трения этой
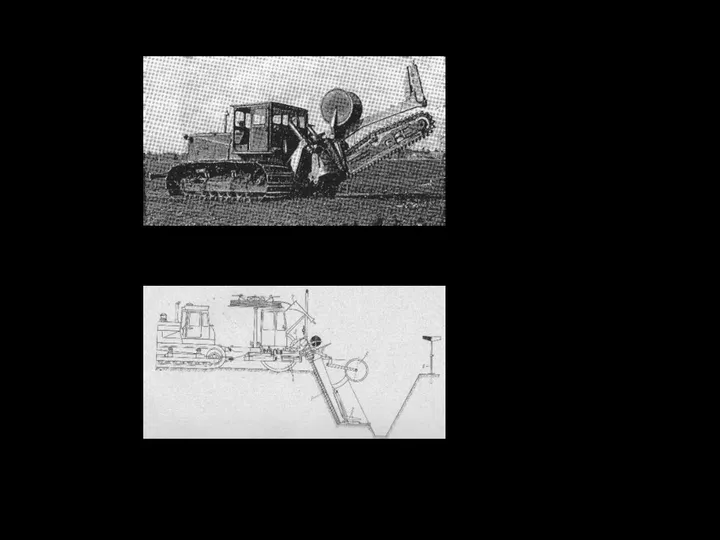
- 130. 6.6 ДРЕНАЖНЫЕ МАШИНЫ 6.6.1 Машины для устройства закрытого дренажа Технологические требования к машинам по устройству закрытого
- 131. Рис. 6.2. Машина глубокого дренирования МТП-39 на тракторе С-100Б 1–рабочий аппарат (винтовая фреза); 2 – трубоформователь;
- 132. 6.6.2 Мощность для работы цепного бара дренажной машины МТП-39 Суммарная мощность при работе цепного бара включает
- 133. 6.6.3 Мощность для работы шнек-фрезы дренажной машины Мощность для работы шнек-фрезы дренажной машины включает затраты на
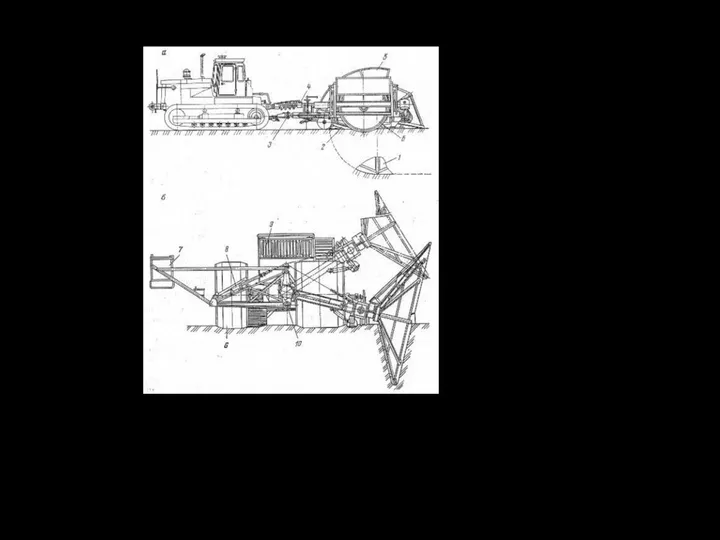
- 134. 6.7 МАШИНЫ ДЛЯ КОРЧЕВКИ, ОЧИСТКИ И ПОГРУЗКИ ПНЕЙ 6.7.1 Машины для сплошной корчевки, сепарации, валкования и
- 135. а – вид сбоку; б – вид сверху; 1 – ходоуменьшитель; 2 – гидросистема; 3 –
- 136. 1 – гидросистема; 2 – ходоуменьшитель; 3 – трансмиссия; 4, 11– гусеничные тележки; 5 – ограждение;
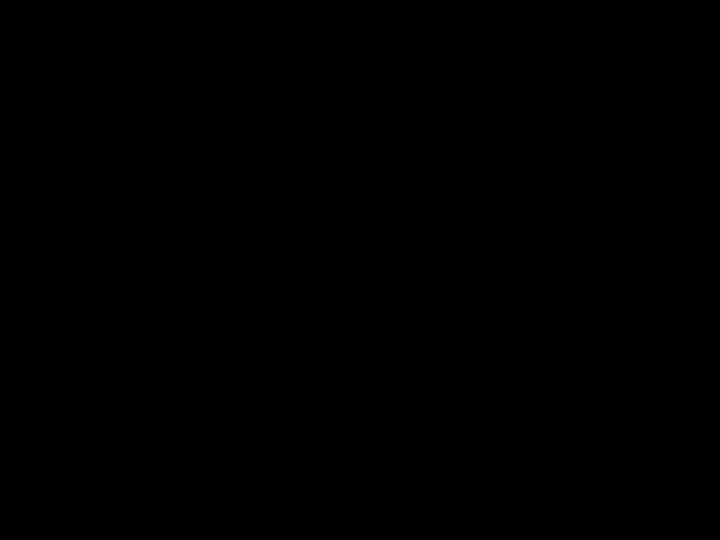
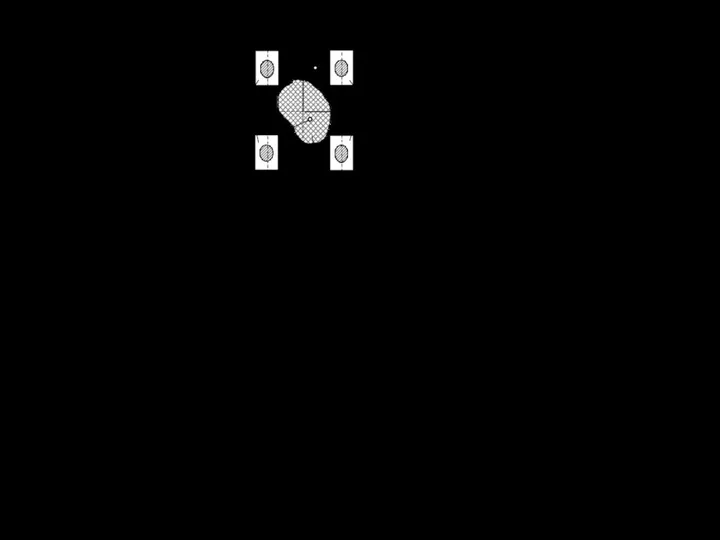
- 137. 6.7.2 Мощность на работу машины МП-3 для валкования пней 1 ν 2 ω Р1 Р2 Р
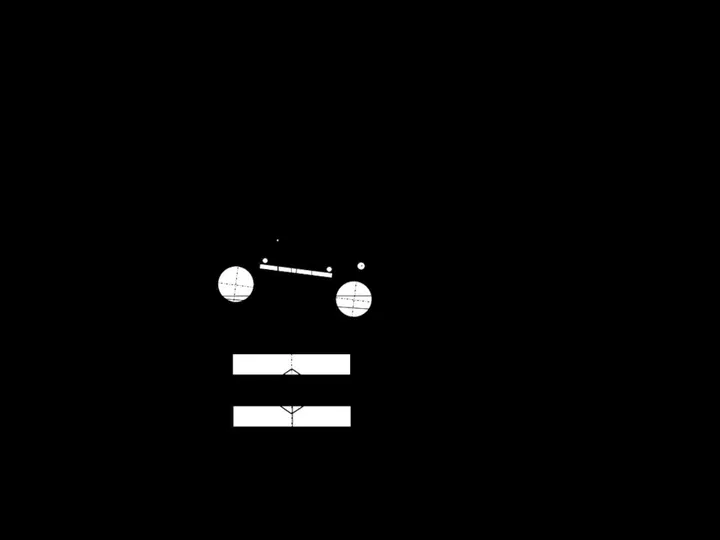
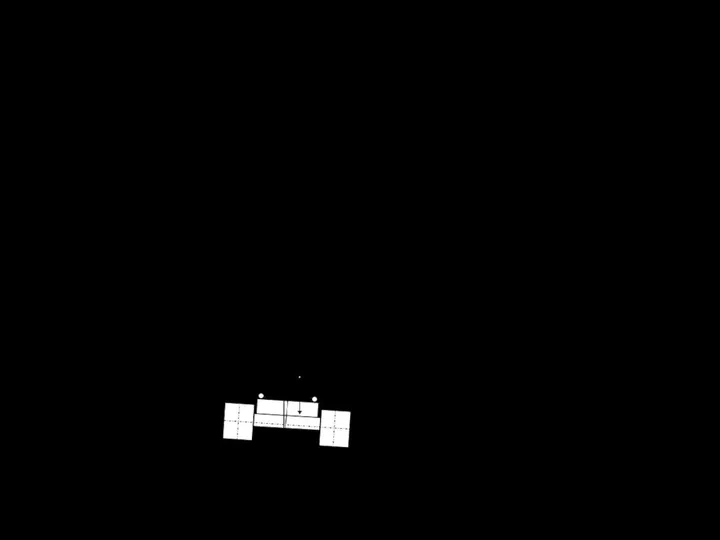
- 138. 6.7.3 Клавишный сепаратор: производительность и затраты мощности Производительность клавишного сепаратора характеризуется по двум состав- ляющим: по
- 139. 6.7.4 Мощность для уборки пней комбайном типа КУП Комбайн КУП – самоходная ма- шина для сплошной
- 140. 6.7.5. Конструктивные особенности движителей тракторных прицепов а, б, в – гусеничные прицепы: 1 и 2 переднее
- 141. Таблица 6.7.5 - Технические данные тракторных прицепов серии МТП-24 № п/п Наименование парамет- ра Ед. изм
- 142. 3.7.6 Выбор параметров гидропривода для опрокидывания кузова тракторного прицепа На вывозке древесины и пней, а также
- 143. Б - гидробак Н – насос шестеренный НШ-46 Р – распределитель Р-75: 3-х секционный (СР1, СР2,
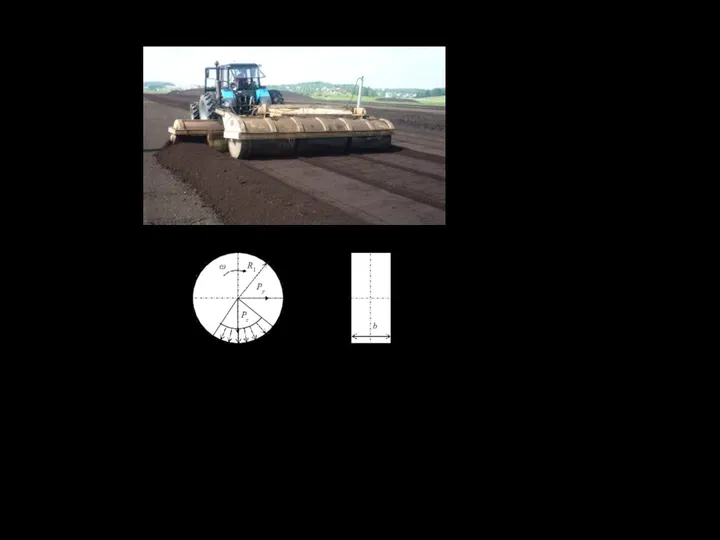
- 144. 6.8 ТОРФЯНОЙ ШНЕКОВЫЙ ПРОФИЛИРОВЩИК 6.8.1 Особенности конструкции торфяных шнековых профилировщиков Торфяной шнековый профилировщик МТП-52 (ТПШ-2) работает
- 145. а – вид сбоку; б – вид сверху (повернуто); Рис. 6.8.2. Шнековый профилировщик МТП-52
- 146. 6.8.2 Мощность для работы шнекового профилировщика Затраты мощности зависят от того, какая операция выполняется машиной. Если
- 147. ВСПОМОГАТЕЛЬНЫЙ РАЗДЕЛ ТИТУЛЬНЫЕ ЛИСТЫ основной литературы по дисциплине «Горные машины и оборудование»
- 148. УДК 622.363.2 (075.8) Горные машины для калийных рудников / А.Б. Морев, А.Д. Смычник, Г.В. Казаченко. –Минск:
- 149. УДК 622.232.83 ББК 33.345 У82 ISBN 978-985-458-201-6 Устройство и эксплуатация проходческого комбайна ПКС-8М / В.А. Дани-
- 150. Министерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Горные машины» Г.В. Казаченко Г.А. Басалай Э.А.
- 151. 2. ПРАКТИЧЕСКАЯ ЧАСТЬ 2.1 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ПРАКТИЧЕСКИХ ЗАНЯТИЙ 1. Статический расчет горной машины на гусеничном
- 152. Министерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ _________________________________________________________ ______ КАФЕДРА «ГОРНЫЕ МАШИНЫ» Г.В КАЗАЧЕНКО, Н.В.
- 153. Министерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Горные машины» Г.В. Казаченко Н.В. Кислов Г.А.
- 154. 2.2 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ЛАБОРАТОРНЫХ РАБОТ 1. Комплекс средств выполнения лабораторных работ на грунтовом канале. 2.
- 155. Министерство образования Республики Беларусь Белорусский национальный технический университет Кафедра «Горные машины» Г.В. Казаченко, Г.А. Басалай, Г.И.
- 156. Министерство образования Республики Беларусь Белорусский национальный технический университет Кафедра «Горные машины» ГОРНЫЕ МАШИНЫ И ОБОРУДОВАНИЕ Лабораторные
- 157. УЧЕБНАЯ ПРОГРАММА по дисциплине «Горные машины и оборудование»
- 158. УТВЕРЖДАЮ Проректор по учебной, воспитательной аналитической и информационной работе ________________ Г.Ф. Ловшенко 15.10.2011 Регистрационный № УД-ФГДЭ
- 159. СОСТАВИТЕЛИ: Н.В. Кислов, профессор кафедры «Горные машины» Белорусского националь- ного технического университета, доктор технических наук, профессор
- 160. ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Учебная программа дисциплины «Горные машины и оборудование» предназначена для специальности 1-36 10 01 «Горные
- 161. пьютерных технологий в курсовом проектировании. Организация самостоятельной работы студентов Самостоятельная работа студентов охватывает все виды занятий
- 162. 1 2 3 4 5 Тема 4. Классификация исполнительных органов. Бара- банные, шнековые, дисковые, цепные, дисковые,
- 163. Тема 3. СТАТИЧЕСКИЙ РАСЧЕТ ГОРНЫХ МАШИН Определение центра масс машины. Внешние нагрузки, действующие на машину. Пространственная
- 164. Тема 9. ШАГАЮЩИЕ МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ Конструктивные схемы механизмов передвижения шагающих экскава- торов, мощность для их работы.
- 165. Раздел VII. БУРОВОЕ ОБОРУДОВАНИЕ Тема 16. ОБЩИЕ СВЕДЕНИЯ И СПОСОБЫ БУРЕНИЯ Способы бурения и расчет процессов.
- 166. ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ КУРСОВОГО ПРОЕКТА Цель курсового проекта – научить студента навыкам инженерного про- ектирования машин
- 167. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ по дисциплине «Горные машины и оборудование»
- 168. Вопросы по курсу «ГОРНЫЕ МАШИНЫ И ОБОРУДОВАНИЕ» (7-й семестр) 1. Классификация горных машин и требования к
- 169. 34. Мощность для работы бермовых фрез. 35. Мощность для работы отрезных коронок. 36. Мощность для передвижения
- 171. Скачать презентацию
Слайд 2занных между собой по своим техническим параметрам так, что обеспечива-
ют рациональное производство
занных между собой по своим техническим параметрам так, что обеспечива-
ют рациональное производство
Слайд 3вых двигателей при добыче полезных ископаемых известно с ХVIII-го века.
В этот
вых двигателей при добыче полезных ископаемых известно с ХVIII-го века.
В этот
Слайд 4
Рисунок 1.2 – Уборочный машинно-тракторный агрегат
на технологической площадке
Рисунок 1.2 – Уборочный машинно-тракторный агрегат
на технологической площадке

Слайд 5
Рисунок 1.4 – Технологический комплекс машин
на карьере по
Рисунок 1.4 – Технологический комплекс машин
на карьере по
Слайд 61. ОБЩАЯ СТРУКТУРА
И ОСНОВЫ УСТОЙЧИВОСТИ ГОРНЫХ МАШИН
1.1 Современная структура
1. ОБЩАЯ СТРУКТУРА
И ОСНОВЫ УСТОЙЧИВОСТИ ГОРНЫХ МАШИН
1.1 Современная структура
Слайд 7требования включают санитарно-гигиенические условия работы персонала,
его безопасность, комфортность труда, лёгкость и
требования включают санитарно-гигиенические условия работы персонала,
его безопасность, комфортность труда, лёгкость и
Слайд 8Таблица 1.1 – Категории горных пород в зависимости от коэффициента кре-
пости
Категория
Таблица 1.1 – Категории горных пород в зависимости от коэффициента кре-
пости
Категория
Слайд 9 μ - коэффициент Пуассона.
Помимо модуля упругости часто используется такая характеристика
μ - коэффициент Пуассона.
Помимо модуля упругости часто используется такая характеристика
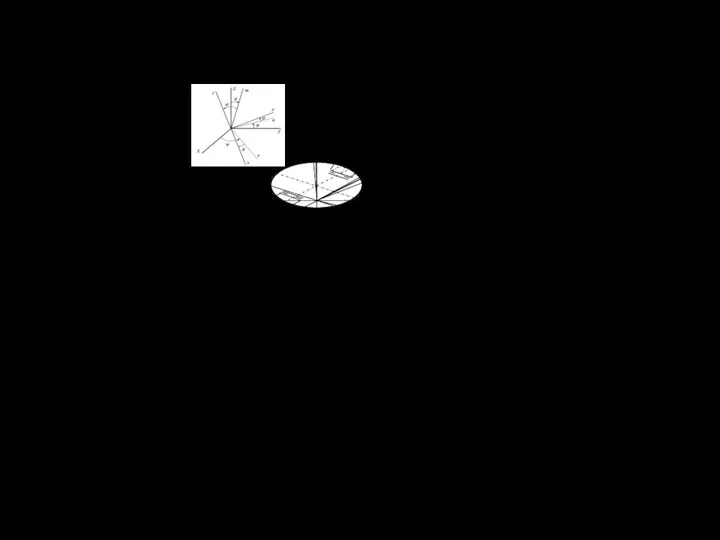
Слайд 10обычно определяют таблицей косинусов между осями подвижной и непо-
движной систем декартовых координат.
обычно определяют таблицей косинусов между осями подвижной и непо-
движной систем декартовых координат.
Слайд 11Аналогично
m
n
x
sin 0cos
0 1 0
cos0 sin
a
к n Z
θ θ
θ θ
θ
−
= ; (1.4)
z
y
x
0 sin cos
0cos sin
1 0 0
a
x nm
ϕ ϕ
ϕ ϕ ϕ
−
= . (1.5)
Тогда матрица направляющих косинусов определится
Аналогично
m
n
x
sin 0cos
0 1 0
cos0 sin
a
к n Z
θ θ
θ θ
θ
−
= ; (1.4)
z
y
x
0 sin cos
0cos sin
1 0 0
a
x nm
ϕ ϕ
ϕ ϕ ϕ
−
= . (1.5)
Тогда матрица направляющих косинусов определится
Слайд 12(1.8) и (1.9) найти проекции сил на оси другой системы.
Возможны и
(1.8) и (1.9) найти проекции сил на оси другой системы.
Возможны и
Слайд 13которой определяется выражением
∫∫
∫∫
⋅
⋅ ⋅
∂=
S
S
pds
rpds
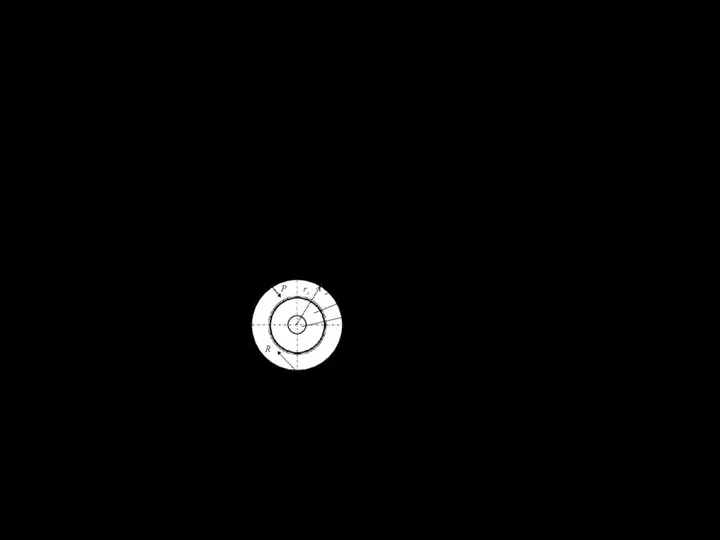
Иначе, центр давления представляет собой точку приложения равно-
действующей сил
которой определяется выражением
∫∫
∫∫
⋅
⋅ ⋅
∂=
S
S
pds
rpds
Иначе, центр давления представляет собой точку приложения равно-
действующей сил
Слайд 14
Интеграл, стоящий в знаменателе выражений (1.13), есть общая сила
Интеграл, стоящий в знаменателе выражений (1.13), есть общая сила
Слайд 15системе осей Oxyz, связанной с машиной. В ряде машин, предназначенных
для рытья
системе осей Oxyz, связанной с машиной. В ряде машин, предназначенных
для рытья
Слайд 16
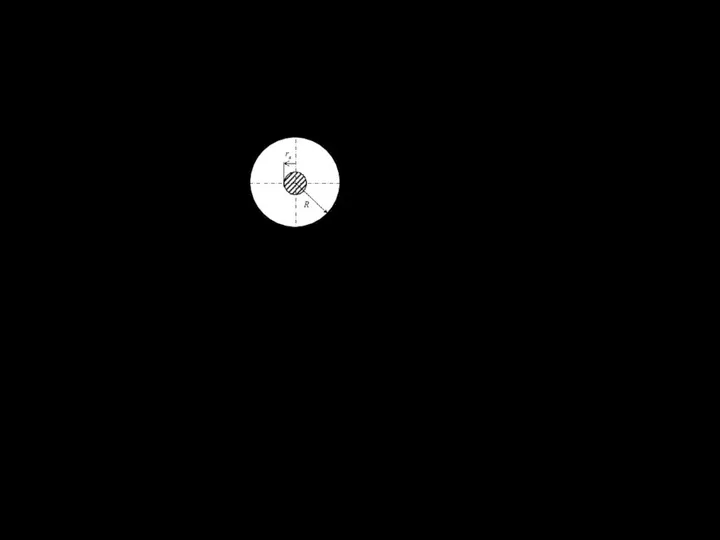
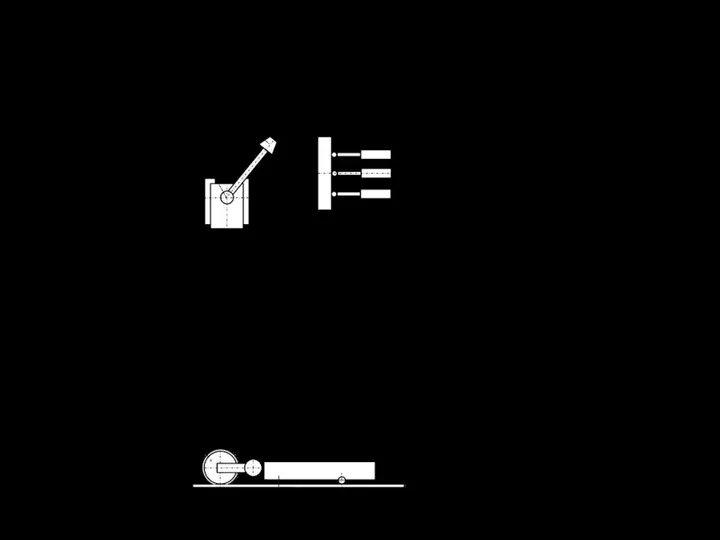
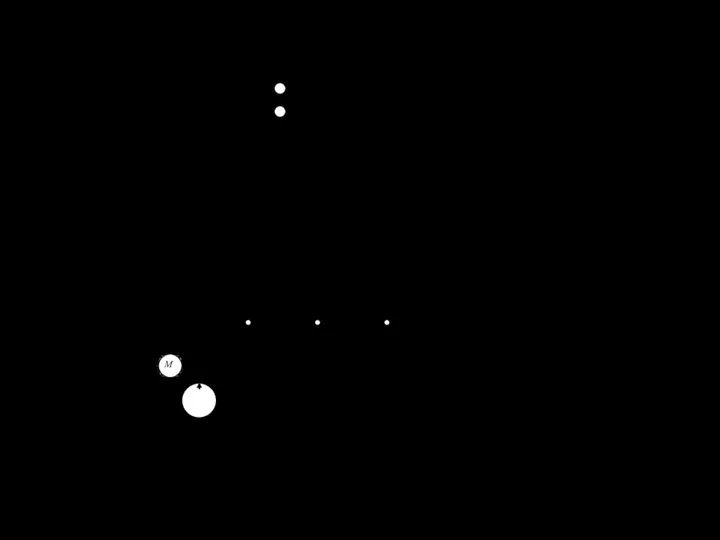
Рисунок 1.5 – К определению допустимого положения центра давления:
Д
Рисунок 1.5 – К определению допустимого положения центра давления:
Д
Слайд 17жена на опорной поверхности, наклоненной под углом φ к горизонту и
нагружена
жена на опорной поверхности, наклоненной под углом φ к горизонту и
нагружена
Слайд 18
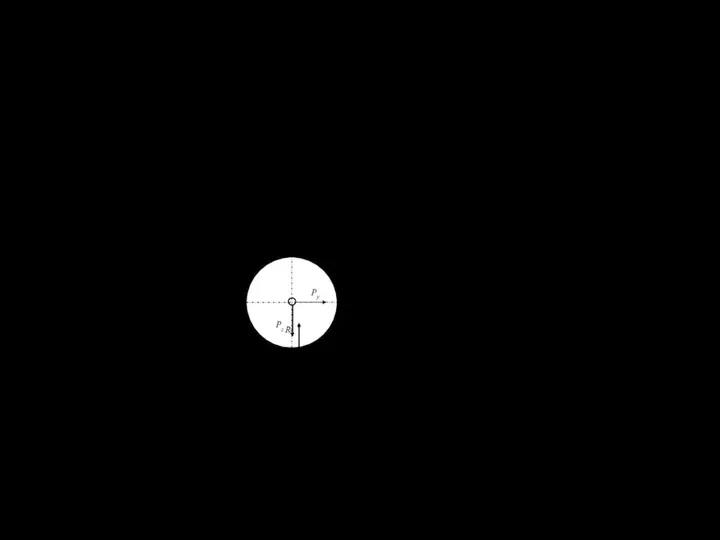
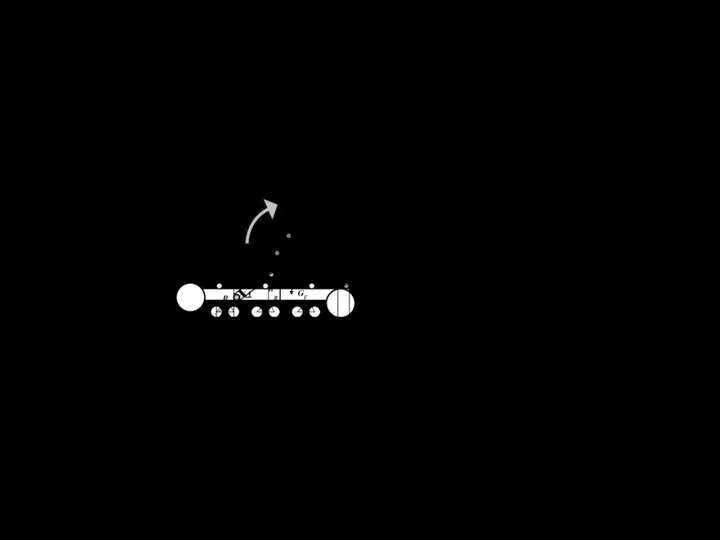
Рис. 1.6,б – Крен шагающего экскаватора
Рис. 1.6,б – Крен шагающего экскаватора

Слайд 19
Из этого соотношения может быть найдено максимальное положение
центра масс
()
⋅ ⋅ ⋅ (ϕ+γ)
⋅− ⋅ ⋅ ⋅− ⋅
Smgsin
FWSmgySMP
zc z x c x .
Из этого соотношения может быть найдено максимальное положение
центра масс
()
⋅ ⋅ ⋅ (ϕ+γ)
⋅− ⋅ ⋅ ⋅− ⋅
Smgsin
FWSmgySMP
zc z x c x .
Слайд 20
Подставив в (1.22) значение Му и разрешив его относительно zc, имеем
Подставив в (1.22) значение Му и разрешив его относительно zc, имеем
Слайд 212. ОСНОВЫ ТЕОРИИ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД
ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ
2.1 Способы разрушения
2. ОСНОВЫ ТЕОРИИ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД
ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ
2.1 Способы разрушения
Слайд 22ды, материала резца и т. п. для наиболее часто применяемых резцов с
ды, материала резца и т. п. для наиболее часто применяемых резцов с
Слайд 23h0,33
e
ep p
′
= . (2.2)
Эта формула является обобщённой формул Зворыкина К.И. и Солода
h0,33
e
ep p
′
= . (2.2)
Эта формула является обобщённой формул Зворыкина К.И. и Солода
Слайд 24стиками являются математическое ожидание и среднеквадратическое откло-
нение, которое определяется статистической обработкой экспериментальных
стиками являются математическое ожидание и среднеквадратическое откло-
нение, которое определяется статистической обработкой экспериментальных
Слайд 25Если сравнить формулы (2.3) и (2.4) и положить, что удельное сопро-
тивление резанию
Если сравнить формулы (2.3) и (2.4) и положить, что удельное сопро-
тивление резанию
Слайд 26
Pp⋅dS=ep⋅F⋅dS, (2.8)
или
dE=ep⋅dV,
тогда
dV
dE
ep= , (2.9)
где Е –
Pp⋅dS=ep⋅F⋅dS, (2.8)
или
dE=ep⋅dV,
тогда
dV
dE
ep= , (2.9)
где Е –
Слайд 27 lp - ширина рабочей кромки резца, м;
hcp, tcp -
lp - ширина рабочей кромки резца, м;
hcp, tcp -
Слайд 282.3 Геометрические и кинематические характеристики
взаимодействия режущих элементов горных машин с
2.3 Геометрические и кинематические характеристики
взаимодействия режущих элементов горных машин с
Слайд 29Таблица 2.1 – Классификация движений исполнительных органов
№
п/п
Число простых
Таблица 2.1 – Классификация движений исполнительных органов
№
п/п
Число простых
Слайд 30
Обозначим через v переносную скорость движения исполнительного
органа, а через u
Обозначим через v переносную скорость движения исполнительного
органа, а через u
Слайд 31ментов фрезы за время ее поворота на угол φ между двумя смежными
ментов фрезы за время ее поворота на угол φ между двумя смежными
Слайд 32За это время фреза перемещается в направлении скорости v на расстоя-
ние
=vω⋅z
λ 2π.
За это время фреза перемещается в направлении скорости v на расстоя-
ние
=vω⋅z
λ 2π.
Слайд 33
В первом случае
ϕ
ϕ
s hDd
к
=∫ ⋅
02
, (2.23)
где ϕ
ω
π
2 sin
z
v
h
⋅
⋅
= - текущее значение толщины
В первом случае
ϕ
ϕ
s hDd
к
=∫ ⋅
02
, (2.23)
где ϕ
ω
π
2 sin
z
v
h
⋅
⋅
= - текущее значение толщины
Слайд 34
b0=b+2h⋅tgα. (2.30)
где α - угол развала бороздки.
b0=b+2h⋅tgα. (2.30)
где α - угол развала бороздки.
Слайд 35
Рисунок 2.13,б – Траектории движения режущих элементов
исполнительного органа
Рисунок 2.13,б – Траектории движения режущих элементов
исполнительного органа
Слайд 36можно принимать толщину стружки постоянной для всех резцов в линии ре-
зания и
можно принимать толщину стружки постоянной для всех резцов в линии ре-
зания и
Слайд 37z – среднее число резцов в линиях резания шнек-фрезы второго типа,
или
z – среднее число резцов в линиях резания шнек-фрезы второго типа,
или
Слайд 38
Рисунок 2.16 (б,в) – Форма забоя
Рисунок 2.16 (б,в) – Форма забоя
Слайд 39где величины v, ω2, z2 имеют тот же смысл, что и в
где величины v, ω2, z2 имеют тот же смысл, что и в
Слайд 403. УРАВНЕНИЯ ДВИЖЕНИЯ ГОРНЫХ МАШИН
3.1 Способы составления уравнений движения
3. УРАВНЕНИЯ ДВИЖЕНИЯ ГОРНЫХ МАШИН
3.1 Способы составления уравнений движения
Слайд 41используются для изучения динамических процессов работы горных машин.
Изучение стационарных режимов работы,
используются для изучения динамических процессов работы горных машин.
Изучение стационарных режимов работы,
Слайд 42
3.2 Основные методы исчисления производительности
и потребляемой мощности
Мощность
3.2 Основные методы исчисления производительности
и потребляемой мощности
Мощность
Слайд 43V
V
Kp=p ;
pKp
ρ
ρ= , (3.8)
где Vp - объём породы после
V
V
Kp=p ;
pKp
ρ
ρ= , (3.8)
где Vp - объём породы после
Слайд 44
где dн - наружный диаметр витков транспортирующей части шнек-фрезы;
dв
где dн - наружный диаметр витков транспортирующей части шнек-фрезы;
dв
Слайд 454. МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ ГОРНЫХМАШИН
И ПОДАЧИ ИХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ НА ЗАБОЙ
4. МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ ГОРНЫХМАШИН
И ПОДАЧИ ИХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ НА ЗАБОЙ
Слайд 46Как большое разнообразие условий работ горных машин, так и огром-
ное число конструкций
Как большое разнообразие условий работ горных машин, так и огром-
ное число конструкций
Слайд 47
Если движитель скользит относительно опорной поверхности , то каса-
тельное напряжение между
Если движитель скользит относительно опорной поверхности , то каса-
тельное напряжение между
Слайд 48Более подробно характер распределения давлений и деформаций дви-
жителя и опорного основания рассматривается
Более подробно характер распределения давлений и деформаций дви-
жителя и опорного основания рассматривается
Слайд 49Обозначив через l1′ и l2″ смещения контактирующих точек движителя
и опорного основания
Обозначив через l1′ и l2″ смещения контактирующих точек движителя
и опорного основания
Слайд 50При использовании для вычисления силы трения формулы (4.9) необ-
ходимо иметь в виду,
При использовании для вычисления силы трения формулы (4.9) необ-
ходимо иметь в виду,
Слайд 51и будем пользоваться ею при определении силы трения между ходовыми
устройствами горных
и будем пользоваться ею при определении силы трения между ходовыми
устройствами горных
Слайд 524.3 Колесные опорно-ходовые устройства горных машин
4.3.1 Колесо транспортного средства
4.3 Колесные опорно-ходовые устройства горных машин
4.3.1 Колесо транспортного средства
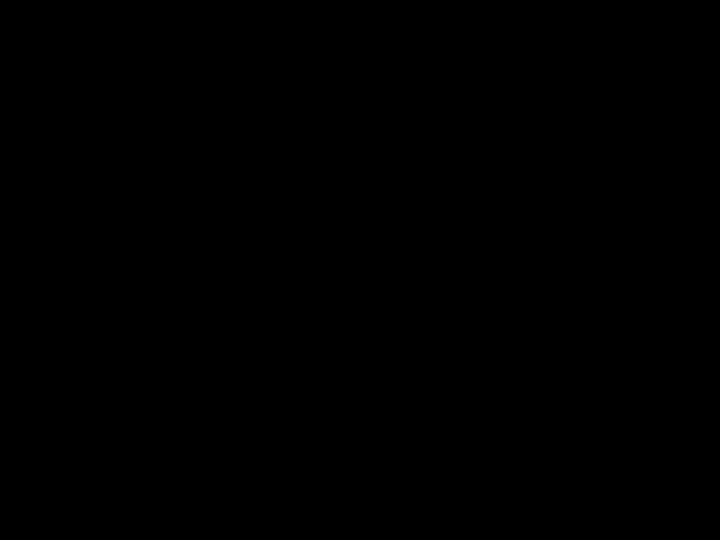
Слайд 534.3.2 Комплектность и устройство шины
Пневматические шины являются одним из основных
4.3.2 Комплектность и устройство шины
Пневматические шины являются одним из основных
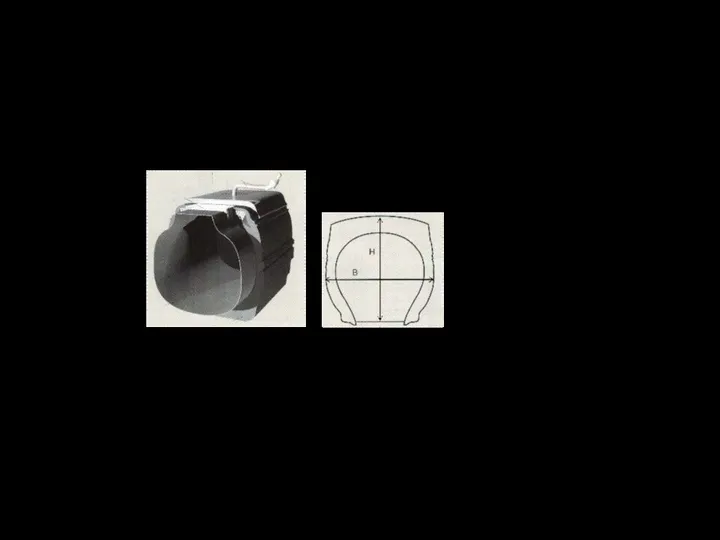
Слайд 544.3.3 Конструкции шин
По типу конструкции различают диагональные и радиальные шины.
ДИАГОНАЛЬНЫЕ
4.3.3 Конструкции шин
По типу конструкции различают диагональные и радиальные шины.
ДИАГОНАЛЬНЫЕ
Слайд 554.3.4 Обозначение и назначение шин
1 – товарный знак
предприятия-изготовителя;
2
4.3.4 Обозначение и назначение шин
1 – товарный знак
предприятия-изготовителя;
2

Слайд 56
4.3.5 Режимы движения колеса
ВЕДОМЫЙ
rк w О –
4.3.5 Режимы движения колеса
ВЕДОМЫЙ
rк w О –
Слайд 574.3.6 Особенности и режимы движения колес
Колесные движители в виду их
4.3.6 Особенности и режимы движения колес
Колесные движители в виду их
Слайд 58rc - свободный радиус колеса – радиус колеса при номинальном давле-
нии воздуха
rc - свободный радиус колеса – радиус колеса при номинальном давле-
нии воздуха
Слайд 59
Более строго радиус качения определяется посредством, так называе-
мого, радиуса свободного качения.
Более строго радиус качения определяется посредством, так называе-
мого, радиуса свободного качения.
Слайд 604.3.7 Сопротивление движению колесных движителей
Как уже указывалось, при оценке взаимодействия
4.3.7 Сопротивление движению колесных движителей
Как уже указывалось, при оценке взаимодействия
Слайд 61Величина коэффициентов fк′ и fк″, а также соотношение между ними
зависит прежде
Величина коэффициентов fк′ и fк″, а также соотношение между ними
зависит прежде

Слайд 62
Рисунок 4.6 – Контакт колеса с рельсом:
а) – основные
Рисунок 4.6 – Контакт колеса с рельсом:
а) – основные
Слайд 63
Рисунок 4.7 – Взаимодействие жесткого колеса
с
Рисунок 4.7 – Взаимодействие жесткого колеса
с
Слайд 64∫
∫∫
==
s
н z
s
н y
z
y
к pdS
pdS
P
P
f , (4.30)
где рн - нормальное давление между колесом и грунтом;
∫
∫∫
==
s
н z
s
н y
z
y
к pdS
pdS
P
P
f , (4.30)
где рн - нормальное давление между колесом и грунтом;
Слайд 65Учитывая, что (4.35) дает несколько завышенные значения fк целесооб-
разно это учитывать поправочным
Учитывая, что (4.35) дает несколько завышенные значения fк целесооб-
разно это учитывать поправочным
Слайд 66
Рисунок 4.8 – Взаимодействие пневматического колеса
с
Рисунок 4.8 – Взаимодействие пневматического колеса
с
Слайд 67Эта формула предложена проф. Ф.А. Опейко [ ] для определения де-
формаций торфяных
Эта формула предложена проф. Ф.А. Опейко [ ] для определения де-
формаций торфяных
![Эта формула предложена проф. Ф.А. Опейко [ ] для определения де- формаций](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/961675/slide-66.jpg)
Слайд 68
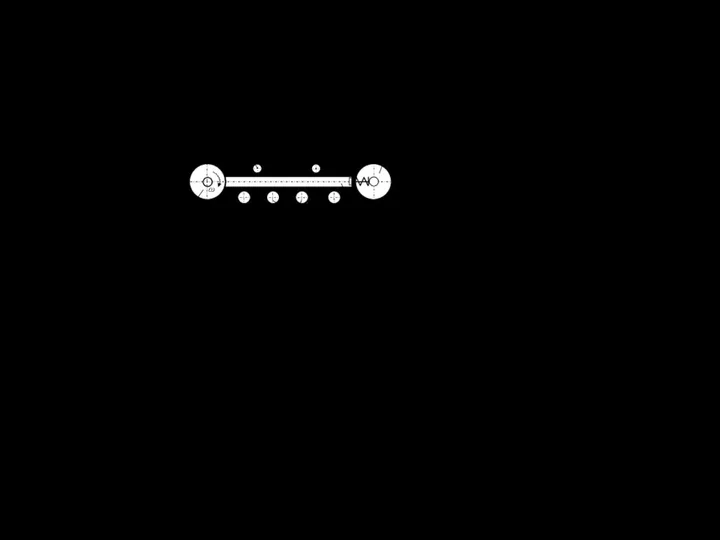
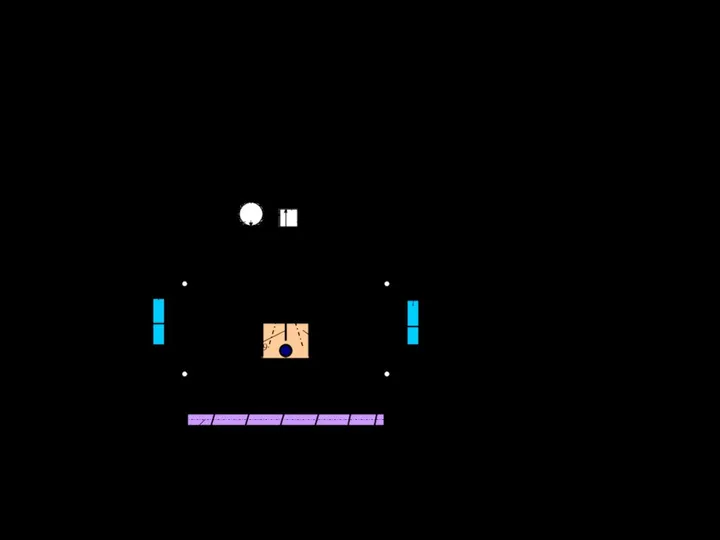
Рис. 4.9 - Расчетная схема двухосной машины
Эти условия
Рис. 4.9 - Расчетная схема двухосной машины
Эти условия
Слайд 69поверхность. Выполнение этого условия обеспечивается тогда, когда центр
давления находится в пределах
поверхность. Выполнение этого условия обеспечивается тогда, когда центр
давления находится в пределах
Слайд 70к
z дм
к
z дм
к
z
dS
Px
аS
Py
S
P
⋅ ⋅
⋅
−
⋅ ⋅
⋅
−
0=4⋅ 2 2
0 0 0 (4.48)
или
d
x
а
yдм−дм
=−
2
1
0 , (4.49)
где хдм , удм – координаты
к
z дм
к
z дм
к
z
dS
Px
аS
Py
S
P
⋅ ⋅
⋅
−
⋅ ⋅
⋅
−
0=4⋅ 2 2
0 0 0 (4.48)
или
d
x
а
yдм−дм
=−
2
1
0 , (4.49)
где хдм , удм – координаты
Слайд 71
Рис. 4.10 - Ядра сечения трехосной (а) и четырехосной (б)
Рис. 4.10 - Ядра сечения трехосной (а) и четырехосной (б)
Слайд 72Суммарные реакции на колеса переднего и заднего мостов
a
y
Rп=Pz0⋅д;
a
ay
Rз=Pz0⋅−д, (4.55)
Суммарные реакции на колеса переднего и заднего мостов
a
y
Rп=Pz0⋅д;
a
ay
Rз=Pz0⋅−д, (4.55)
Слайд 73Определим размеры пятна контакта колеса, считая, что величины Pzi
определены.
Площадь пятна
Определим размеры пятна контакта колеса, считая, что величины Pzi
определены.
Площадь пятна
Слайд 744.3.9 Мощность для передвижения колесного движителя
Необходимая для передвижения горной машины
4.3.9 Мощность для передвижения колесного движителя
Необходимая для передвижения горной машины
Слайд 75
Рисунок 4.12 – Определение составляющей силы тяжести,
параллельной опорной
Рисунок 4.12 – Определение составляющей силы тяжести,
параллельной опорной
Слайд 76Эти условия передвижения далеко не единственные, но, как правило,
они должны соблюдаться
Эти условия передвижения далеко не единственные, но, как правило,
они должны соблюдаться
Слайд 77
где v – продольная составляющая скорости точки машины, лежащей на её
где v – продольная составляющая скорости точки машины, лежащей на её
Слайд 78
Рисунок 4.13 – Основные системы поворота колесных машин:
а) – за
Рисунок 4.13 – Основные системы поворота колесных машин:
а) – за
Слайд 79
Рисунок 4.14 - Вагон самоходный 5ВС15М (схема «краб»)
Рисунок 4.14 - Вагон самоходный 5ВС15М (схема «краб»)

Слайд 804.4 Гусеничные движители
4.4.1 Принципиальные схемы и принцип действия
В
4.4 Гусеничные движители
4.4.1 Принципиальные схемы и принцип действия
В
Слайд 81
Теоретическая скорость vT равна скорости перематывания гусеничных
цепей
vT=u,
где u=ωзв⋅rзв;
Теоретическая скорость vT равна скорости перематывания гусеничных
цепей
vT=u,
где u=ωзв⋅rзв;
Слайд 82где fд – коэффициент сопротивления деформированию несущего основания.
Этот коэффициент в свое
где fд – коэффициент сопротивления деформированию несущего основания.
Этот коэффициент в свое
Слайд 834.4.3 Коэффициент сопротивления деформации несущего основания
Так, например, коэффициент fд сопротивления
4.4.3 Коэффициент сопротивления деформации несущего основания
Так, например, коэффициент fд сопротивления
Слайд 84
( )
a
z
a
h
fд=+−1λ, (4.80)
где z – число опорных катков;
λ –
( )
a
z
a
h
fд=+−1λ, (4.80)
где z – число опорных катков;
λ –
Слайд 85где σz и σу – проекции напряжения, действующего на гусеницу;
Pz
где σz и σу – проекции напряжения, действующего на гусеницу;
Pz
Слайд 86
Для жесткого одноопорного движителя моменты сопротивления опор-
ной площади с учетом того,
Для жесткого одноопорного движителя моменты сопротивления опор-
ной площади с учетом того,
Слайд 87У двухопорного жесткого гусеничного движителя давление изменяется
как по длине, так и
У двухопорного жесткого гусеничного движителя давление изменяется
как по длине, так и
Слайд 88Максимальная и минимальные деформации соответственно
max3 2
2maxE ab
p
h
г
= ⋅ ; h2minpEmin3ab2
г
= ⋅ , (4.93)
где pmax
Максимальная и минимальные деформации соответственно
max3 2
2maxE ab
p
h
г
= ⋅ ; h2minpEmin3ab2
г
= ⋅ , (4.93)
где pmax
Слайд 89
fpab
dt
dv
2fд′⋅p⋅a⋅b+P3+m⋅g⋅sinϕ+C1⋅m2 ⋅ ⋅ ⋅, (4.95)
где f – коэффициент сцепления (трения) между гусеницами
fpab
dt
dv
2fд′⋅p⋅a⋅b+P3+m⋅g⋅sinϕ+C1⋅m2 ⋅ ⋅ ⋅, (4.95)
где f – коэффициент сцепления (трения) между гусеницами
Слайд 90
Для определения радиуса и угловой скорости поворота машины рас-
смотрим её движение
Для определения радиуса и угловой скорости поворота машины рас-
смотрим её движение
Слайд 91проф.Ф.А. Опейко доказал в математической теории трения [ ]. Действи-
тельно, выражая проекцию
проф.Ф.А. Опейко доказал в математической теории трения [ ]. Действи-
тельно, выражая проекцию
![проф.Ф.А. Опейко доказал в математической теории трения [ ]. Действи- тельно, выражая](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/961675/slide-90.jpg)
Слайд 92
=∫∫
1
1 1
S
Tx dTx; =∫∫
2
2 2
S
Tx dTx; =∫∫
1
1 1
S
Ty dTy; =∫∫
2
2 2
S
Ty dTy
=∫∫
1
1 1
S
L dL; =∫∫
2
2 2
S
L dL, (4.98)
где dT1=f⋅p1⋅dS1; dT2=f⋅p2⋅dS2;
=∫∫
1
1 1
S
Tx dTx; =∫∫
2
2 2
S
Tx dTx; =∫∫
1
1 1
S
Ty dTy; =∫∫
2
2 2
S
Ty dTy
=∫∫
1
1 1
S
L dL; =∫∫
2
2 2
S
L dL, (4.98)
где dT1=f⋅p1⋅dS1; dT2=f⋅p2⋅dS2;
Слайд 93Тогда уравнения равновесия имеют вид
( ) ( )
( ) (3 ) 0
3
3
3
3
3
3
3
3
3
2
2
2 2
22 2 2
2
2
2
1
2 2
12 2 1
2
1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
−
+
+
+ +
+
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
−
+
+
+ +
+
+
a e e
a e
e e
e
a e e
fpab a e
a e e
a e
e e
e
a e e
fpab a e
P
y
y
y
y
y
y
y
y
y
y
y
y
x
;
( ) ( )
3 (3 ) (3 ) 0
3 3
3
2
2
2
2
2
2
2
2
2
2
2
2 2
2
1
2
1
2
1
2
1
2
1
2
1 1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+
+ +
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+
+ +
−
a e e
e
e e
e
a e e
fpab e
a e e
e
e e
e
a e e
fpab e
P
y y y
y y y
y
;
(4.99)
( ) ( )
( ) ( ) ⎟⎟−
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
+
+
+
+ +
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
+
+
+
+ +
+
2
1
2
1
2
1
2
1
2
1
2
1 1
2
2
2
2
2
2
2
2
2
2
2
2 2
3 3
23
3 3
23
a e e
e
e e
e
a e e
ddfpab e
a e e
e
e e
e
a e e
dfpab e
M
y y y
y y y
( ) ( )
( ) (3 ) 0
3
3
3
33
3
3
3
3
33
2
2
2 2
2
2
2
2
1
2 2
1
2
1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+ +
+
−
−
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+ +
+
−
a e e
a e
a e e
afpab a e
a e e
a e
a e e
afpab a e
y
y
y
y
y
y
y
y
Тогда уравнения равновесия имеют вид
( ) ( )
( ) (3 ) 0
3
3
3
3
3
3
3
3
3
2
2
2 2
22 2 2
2
2
2
1
2 2
12 2 1
2
1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
−
+
+
+ +
+
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
−
+
+
+ +
+
+
a e e
a e
e e
e
a e e
fpab a e
a e e
a e
e e
e
a e e
fpab a e
P
y
y
y
y
y
y
y
y
y
y
y
y
x
;
( ) ( )
3 (3 ) (3 ) 0
3 3
3
2
2
2
2
2
2
2
2
2
2
2
2 2
2
1
2
1
2
1
2
1
2
1
2
1 1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+
+ +
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+
+ +
−
a e e
e
e e
e
a e e
fpab e
a e e
e
e e
e
a e e
fpab e
P
y y y
y y y
y
;
(4.99)
( ) ( )
( ) ( ) ⎟⎟−
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
+
+
+
+ +
+
+
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
+
+
+
+ +
+
2
1
2
1
2
1
2
1
2
1
2
1 1
2
2
2
2
2
2
2
2
2
2
2
2 2
3 3
23
3 3
23
a e e
e
e e
e
a e e
ddfpab e
a e e
e
e e
e
a e e
dfpab e
M
y y y
y y y
( ) ( )
( ) (3 ) 0
3
3
3
33
3
3
3
3
33
2
2
2 2
2
2
2
2
1
2 2
1
2
1
=
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+ +
+
−
−
⎟⎟
⎟
⎟
⎠
⎞
⎜⎜
⎜
⎜
⎝
⎛
− +
−
+
+ +
+
−
a e e
a e
a e e
afpab a e
a e e
a e
a e e
afpab a e
y
y
y
y
y
y
y
y
Слайд 94
0
9
23
13
9
2
2
2
0
2
0
2
0 =
+
−
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
+
+ ea
a
a
a e
e
d . (4.100)
Это уравнение преобразуется к квадратному относительно е0
0
9
23
13
9
2
2
2
0
2
0
2
0 =
+
−
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
+
+ ea
a
a
a e
e
d . (4.100)
Это уравнение преобразуется к квадратному относительно е0
Слайд 95( ) ( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
⋅
−
+
− ⋅ ⋅
−
⋅ ⋅ ⋅
+
Δ=
2 2 2 2
2
1 2
3
2 23
1
4
4
32 2 24
4
da
Md
da
P pp fab
fpdb
da
e y ;
(4.107)
( ) ( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
⋅
−
+
− ⋅ ⋅
−+
⋅ ⋅ ⋅
+
Δ=
2 2 2 2
2
1 2
3
2 23
2
4
4
32 2 24
4
da
Md
da
P pp fab
fpdb
da
e y .
При больших значениях сдвигающих сил для достижения решения
( ) ( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
⋅
−
+
− ⋅ ⋅
−
⋅ ⋅ ⋅
+
Δ=
2 2 2 2
2
1 2
3
2 23
1
4
4
32 2 24
4
da
Md
da
P pp fab
fpdb
da
e y ;
(4.107)
( ) ( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
⋅
−
+
− ⋅ ⋅
−+
⋅ ⋅ ⋅
+
Δ=
2 2 2 2
2
1 2
3
2 23
2
4
4
32 2 24
4
da
Md
da
P pp fab
fpdb
da
e y .
При больших значениях сдвигающих сил для достижения решения
Слайд 96 Т1б, Т2б – арифметические суммы боковых сил, действующих на гусенич-
ные цепи;
Т1б, Т2б – арифметические суммы боковых сил, действующих на гусенич-
ные цепи;
Слайд 97
Последние формулы следуют из уравнений равновесия (4.99) двухгу-
сеничной машины при повороте
Последние формулы следуют из уравнений равновесия (4.99) двухгу-
сеничной машины при повороте
Слайд 98Отношение
2
2
2
2
2
2
2
2
2 9
39 =ρ
+ +
+
e a e
a e
(4.114)
называют коэффициентом запаса сцепления при повороте и условие
Отношение
2
2
2
2
2
2
2
2
2 9
39 =ρ
+ +
+
e a e
a e
(4.114)
называют коэффициентом запаса сцепления при повороте и условие
Слайд 994.5 Шагающие механизмы перемещения
Появление таких необычных и экзотических механизмов передвижения
4.5 Шагающие механизмы перемещения
Появление таких необычных и экзотических механизмов передвижения
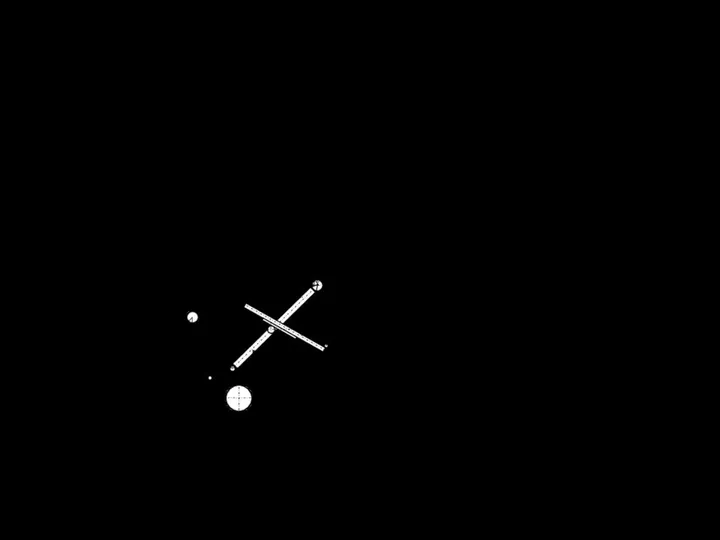
Слайд 100
л
б
лF
R
p
=2
, (4.117)
где R – радиус опорной базы;
Rл –
л
б
лF
R
p
=2
, (4.117)
где R – радиус опорной базы;
Rл –
Слайд 101Для шагающих экскаваторов-драглайнов вопросы устойчивости имеют
особо важное значение, так как эти
Для шагающих экскаваторов-драглайнов вопросы устойчивости имеют
особо важное значение, так как эти
Слайд 102где
л
c
A l
mgl
R= ⋅ ⋅ - сила давления базы на несущее основание;
f –
где
л
c
A l
mgl
R= ⋅ ⋅ - сила давления базы на несущее основание;
f –
Слайд 1034.6 Автономные и специальные механизмы подачи
Как уже отмечалось, у многих
4.6 Автономные и специальные механизмы подачи
Как уже отмечалось, у многих
Слайд 104
cos 2 22
vт γ=vn+ωp⋅lp, (4.122)
где vт - скорость каната тяги;
β -
cos 2 22
vт γ=vn+ωp⋅lp, (4.122)
где vт - скорость каната тяги;
β -
Слайд 105
где ep - удельное сопротивление резанию (удельное сопротивление копа-
нию).
Примером организации
где ep - удельное сопротивление резанию (удельное сопротивление копа-
нию).
Примером организации
Слайд 106б)
Рисунок 4.28 – Одношнековый очистной комбайн
Канатные и
б)
Рисунок 4.28 – Одношнековый очистной комбайн
Канатные и

Слайд 1075.1 Моделирование отвалообразователя
Для моделирования отвалообразователя принимаем следующие допу-
щения.
1. Отвалообразователь
5.1 Моделирование отвалообразователя
Для моделирования отвалообразователя принимаем следующие допу-
щения.
1. Отвалообразователь
Слайд 108Возьмем углы ψ, ϕ, θ за обобщенные координаты. Тогда ψ, ϕ, θ
Возьмем углы ψ, ϕ, θ за обобщенные координаты. Тогда ψ, ϕ, θ
Слайд 109
h=h0+r⋅cosα⋅tgθ, где θ – угол крена базы.
R
h h
tg
2
θ=max−min;
2
maxmin
0
h h
h= + ;
h=h0+r⋅cosα⋅tgθ, где θ – угол крена базы.
R
h h
tg
2
θ=max−min;
2
maxmin
0
h h
h= + ;
Слайд 110π (ν)πθ (ν)θ
θ π tgRE tg
R
E
RtgKh R 3 2
2
4 4
1 21
2
4
1
4
1
−
⋅=
⋅−
= ⋅ ⋅= ; (5.2)
( ) ( )
3
2
3
2 1 22 1
ER
Nr
ER
M
tg y д
⋅
⋅−
=
⋅
−
θ= ν ν , см.стр.6, то же самое, Mдmax=N⋅rд.
Если считать
π (ν)πθ (ν)θ
θ π tgRE tg
R
E
RtgKh R 3 2
2
4 4
1 21
2
4
1
4
1
−
⋅=
⋅−
= ⋅ ⋅= ; (5.2)
( ) ( )
3
2
3
2 1 22 1
ER
Nr
ER
M
tg y д
⋅
⋅−
=
⋅
−
θ= ν ν , см.стр.6, то же самое, Mдmax=N⋅rд.
Если считать
Слайд 1116. МАШИНЫ ДЛЯ ПОДГОТОВКИ ТОРФЯНЫХ МЕСТОРОЖДЕНИЙ
И РЕМОНТА ТЕХНОЛОГИЧЕСКИХ ПЛОЩАДЕЙ
№
6. МАШИНЫ ДЛЯ ПОДГОТОВКИ ТОРФЯНЫХ МЕСТОРОЖДЕНИЙ
И РЕМОНТА ТЕХНОЛОГИЧЕСКИХ ПЛОЩАДЕЙ
№
Слайд 1126.1 Одноковшовые экскаваторы
6.1.1 Экскаватор с механическим приводом
6 8 9
6.1 Одноковшовые экскаваторы
6.1.1 Экскаватор с механическим приводом
6 8 9
Слайд 1136.1.3 Мощность для привода тяговой лебедки экскаватора
6.1.3 Мощность для привода тяговой лебедки экскаватора
Слайд 1146.2 МАШИНЫ ДЛЯ СВОДКИ ЛЕСА,
РАЗДЕЛКИ, ПОГРУЗКИ И ВЫВОЗКИ ДРЕВЕСИНЫ
6.2.1 Машины
6.2 МАШИНЫ ДЛЯ СВОДКИ ЛЕСА,
РАЗДЕЛКИ, ПОГРУЗКИ И ВЫВОЗКИ ДРЕВЕСИНЫ
6.2.1 Машины
Слайд 1156.2.2 Валовая производительность машины для сводки леса
Валовая производительность машины для
6.2.2 Валовая производительность машины для сводки леса
Валовая производительность машины для
Слайд 1166.2.3 Энергия, необходимая для спиливания дерева
При спиливании дерева
источником энергии
6.2.3 Энергия, необходимая для спиливания дерева
При спиливании дерева
источником энергии
Слайд 1176.3 Машины для глубокого фрезерования залежи с древесиной
Рабочим органом является горизонтальная
6.3 Машины для глубокого фрезерования залежи с древесиной
Рабочим органом является горизонтальная
Слайд 118
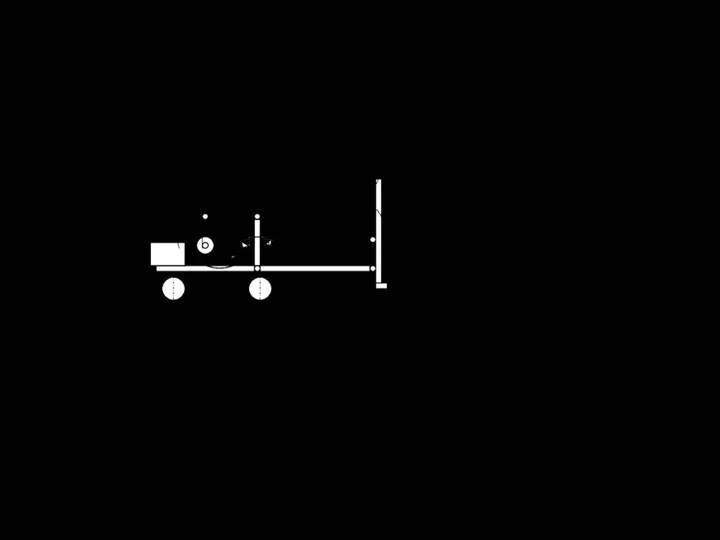
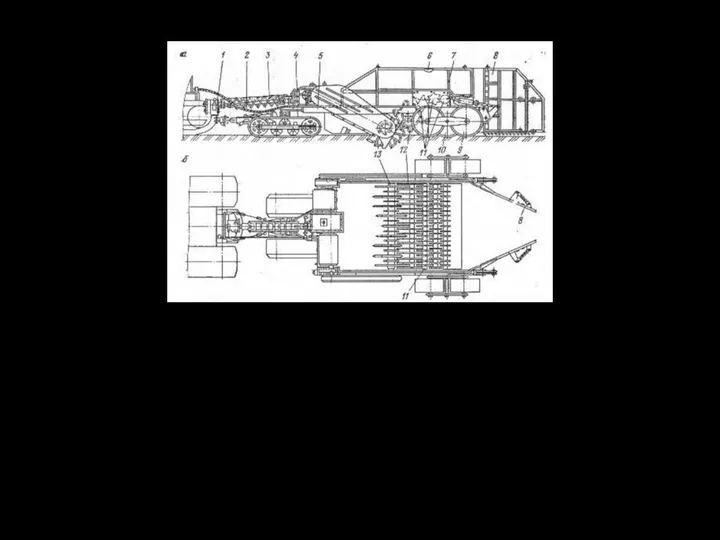
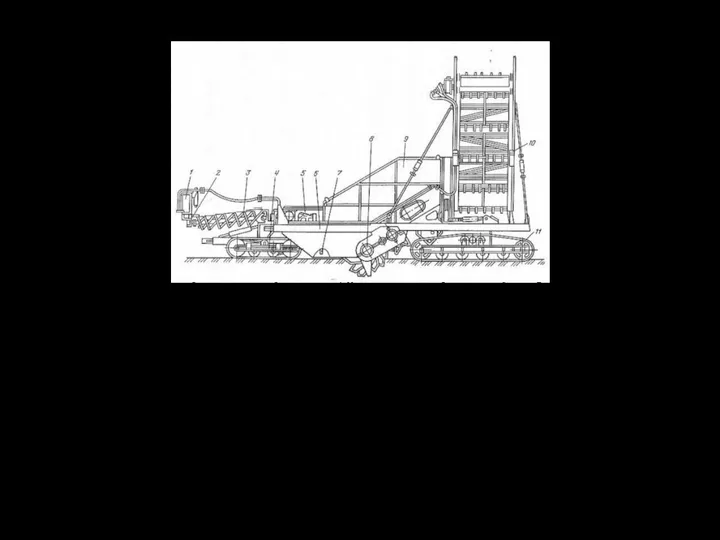
1 – передний отвал; 2 – ограждение; 3, 7. 15
1 – передний отвал; 2 – ограждение; 3, 7. 15
Слайд 1196.4. Канавные машины непрерывного действия
6.4.1.Определение рабочей скорости многоковшового экскаватора
для
6.4. Канавные машины непрерывного действия
6.4.1.Определение рабочей скорости многоковшового экскаватора
для
Слайд 120Решение:
Уравнение баланса мощности при работе многоковшового экскаватора
во время рытья осушительного
Решение:
Уравнение баланса мощности при работе многоковшового экскаватора
во время рытья осушительного
Слайд 1213. Мощность на работу горизонтального ленточного конвейера
3
31000η
fкqLvк
N= , кВт
где fк=
3. Мощность на работу горизонтального ленточного конвейера
3
31000η
fкqLvк
N= , кВт
где fк=
Слайд 1226.4.2 Канавные машины с конусной фрезой
Для рытья и углубления картовых канав
6.4.2 Канавные машины с конусной фрезой
Для рытья и углубления картовых канав
Слайд 123
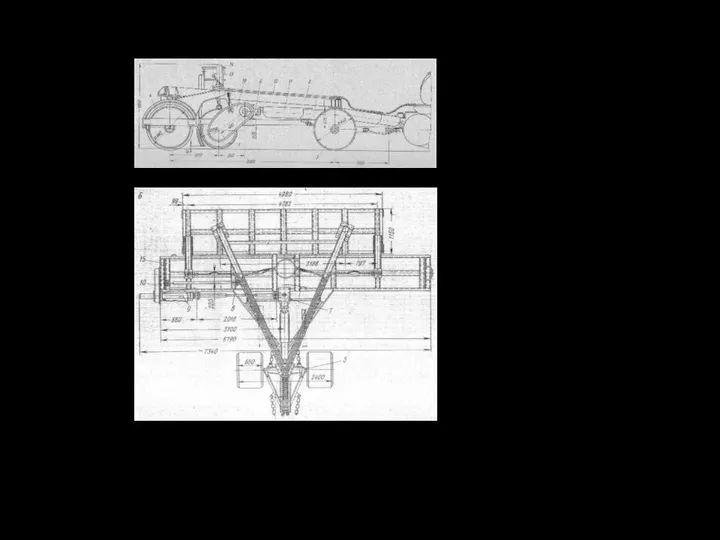
а – вид сбоку; б – вид сзади;
1
а – вид сбоку; б – вид сзади;
1
Слайд 124
Таблица 6.4.2 - Техническая характеристика канавных машин
№ Наименование показателя МТП-32А
Таблица 6.4.2 - Техническая характеристика канавных машин
№ Наименование показателя МТП-32А
Слайд 1256.4.3 Условие достаточности производительности конусной фрезы
Производительность фрезы по ходу агрегата
6.4.3 Условие достаточности производительности конусной фрезы
Производительность фрезы по ходу агрегата
Слайд 1266.4.4 Мощность для работы канавной машины с конусной фрезой
Суммарная мощность, необходимая
6.4.4 Мощность для работы канавной машины с конусной фрезой
Суммарная мощность, необходимая
Слайд 1276.5 МАШИНЫ ДЛЯ РЕМОНТА ОСУШИТЕЛЬНОЙ СЕТИ
6.5.1 Шнеко-роторная машина для ремонта
6.5 МАШИНЫ ДЛЯ РЕМОНТА ОСУШИТЕЛЬНОЙ СЕТИ
6.5.1 Шнеко-роторная машина для ремонта
Слайд 1286.5.2 Производительность ротора шнеко-роторной машины
Для нормальной работы каналоочисти-
тельной машины
6.5.2 Производительность ротора шнеко-роторной машины
Для нормальной работы каналоочисти-
тельной машины
Слайд 1296.5.3 Скорость частиц при сходе с лопаток. Дальность бросания
Для разжиженной торфяной
6.5.3 Скорость частиц при сходе с лопаток. Дальность бросания
Для разжиженной торфяной
Слайд 1306.6 ДРЕНАЖНЫЕ МАШИНЫ
6.6.1 Машины для устройства закрытого дренажа
Технологические требования
6.6 ДРЕНАЖНЫЕ МАШИНЫ
6.6.1 Машины для устройства закрытого дренажа
Технологические требования
Слайд 131
Рис. 6.2. Машина глубокого дренирования МТП-39 на
Рис. 6.2. Машина глубокого дренирования МТП-39 на
Слайд 1326.6.2 Мощность для работы цепного бара дренажной машины МТП-39
Суммарная мощность при
6.6.2 Мощность для работы цепного бара дренажной машины МТП-39
Суммарная мощность при
Слайд 1336.6.3 Мощность для работы шнек-фрезы дренажной машины
Мощность для работы шнек-фрезы дренажной
6.6.3 Мощность для работы шнек-фрезы дренажной машины
Мощность для работы шнек-фрезы дренажной
Слайд 1346.7 МАШИНЫ ДЛЯ КОРЧЕВКИ, ОЧИСТКИ И ПОГРУЗКИ ПНЕЙ
6.7.1 Машины для
6.7 МАШИНЫ ДЛЯ КОРЧЕВКИ, ОЧИСТКИ И ПОГРУЗКИ ПНЕЙ
6.7.1 Машины для
Слайд 135
а – вид сбоку; б – вид сверху; 1 – ходоуменьшитель;
а – вид сбоку; б – вид сверху; 1 – ходоуменьшитель;
Слайд 136
1 – гидросистема; 2 – ходоуменьшитель; 3 – трансмиссия; 4, 11–
1 – гидросистема; 2 – ходоуменьшитель; 3 – трансмиссия; 4, 11–
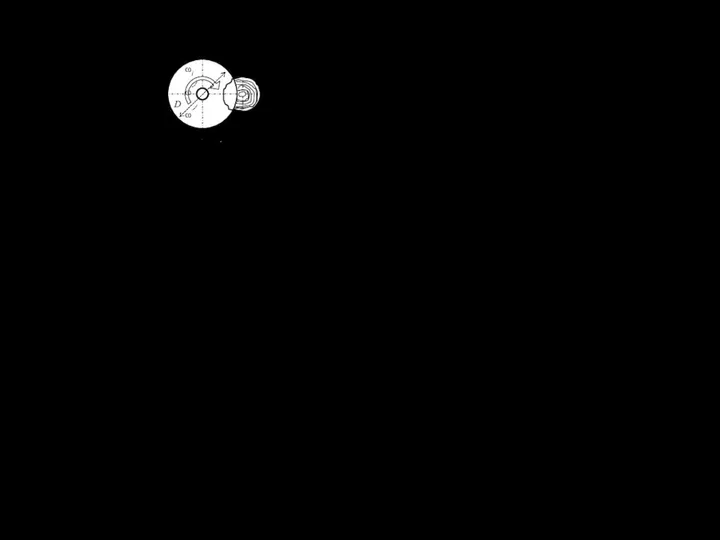
Слайд 1376.7.2 Мощность на работу машины МП-3 для валкования пней
1
6.7.2 Мощность на работу машины МП-3 для валкования пней
1
Слайд 1386.7.3 Клавишный сепаратор: производительность и затраты мощности
Производительность клавишного сепаратора характеризуется по
6.7.3 Клавишный сепаратор: производительность и затраты мощности
Производительность клавишного сепаратора характеризуется по
Слайд 1396.7.4 Мощность для уборки пней комбайном типа КУП
Комбайн КУП –
6.7.4 Мощность для уборки пней комбайном типа КУП
Комбайн КУП –
Слайд 1406.7.5. Конструктивные особенности движителей тракторных прицепов
а, б, в –
6.7.5. Конструктивные особенности движителей тракторных прицепов
а, б, в –
Слайд 141Таблица 6.7.5 - Технические данные тракторных прицепов серии МТП-24
№
п/п
Наименование
Таблица 6.7.5 - Технические данные тракторных прицепов серии МТП-24
№
п/п
Наименование
Слайд 1423.7.6 Выбор параметров гидропривода
для опрокидывания кузова тракторного прицепа
На вывозке древесины
3.7.6 Выбор параметров гидропривода
для опрокидывания кузова тракторного прицепа
На вывозке древесины
Слайд 143Б - гидробак
Н – насос шестеренный НШ-46
Р – распределитель Р-75:
Б - гидробак
Н – насос шестеренный НШ-46
Р – распределитель Р-75:
Слайд 1446.8 ТОРФЯНОЙ ШНЕКОВЫЙ ПРОФИЛИРОВЩИК
6.8.1 Особенности конструкции торфяных шнековых профилировщиков
Торфяной шнековый
6.8 ТОРФЯНОЙ ШНЕКОВЫЙ ПРОФИЛИРОВЩИК
6.8.1 Особенности конструкции торфяных шнековых профилировщиков
Торфяной шнековый
Слайд 145
а – вид
а – вид
Слайд 1466.8.2 Мощность для работы шнекового профилировщика
Затраты мощности зависят от того, какая
6.8.2 Мощность для работы шнекового профилировщика
Затраты мощности зависят от того, какая
Слайд 147
ВСПОМОГАТЕЛЬНЫЙ РАЗДЕЛ
ВСПОМОГАТЕЛЬНЫЙ РАЗДЕЛ
Слайд 148УДК 622.363.2 (075.8)
Горные машины для калийных рудников / А.Б. Морев, А.Д.
УДК 622.363.2 (075.8)
Горные машины для калийных рудников / А.Б. Морев, А.Д.
Слайд 149 УДК 622.232.83
ББК 33.345
У82
ISBN 978-985-458-201-6
Устройство и эксплуатация проходческого
УДК 622.232.83
ББК 33.345
У82
ISBN 978-985-458-201-6
Устройство и эксплуатация проходческого
Слайд 150
Министерство образования
Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ
ТЕХНИЧЕСКИЙ
Министерство образования
Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ
ТЕХНИЧЕСКИЙ
Слайд 151
2. ПРАКТИЧЕСКАЯ ЧАСТЬ
2.1 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ПРАКТИЧЕСКИХ ЗАНЯТИЙ
2. ПРАКТИЧЕСКАЯ ЧАСТЬ
2.1 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ПРАКТИЧЕСКИХ ЗАНЯТИЙ
Слайд 152
Министерство образования Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
_________________________________________________________
______
Министерство образования Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
_________________________________________________________
______
Слайд 153
Министерство образования
Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Министерство образования
Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Слайд 1542.2 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ЛАБОРАТОРНЫХ РАБОТ
1. Комплекс средств выполнения лабораторных
2.2 ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ ЛАБОРАТОРНЫХ РАБОТ
1. Комплекс средств выполнения лабораторных
Слайд 155
Министерство образования Республики Беларусь
Белорусский национальный технический университет
Министерство образования Республики Беларусь
Белорусский национальный технический университет
Слайд 156
Министерство образования Республики Беларусь
Белорусский национальный технический университет
Кафедра
Министерство образования Республики Беларусь
Белорусский национальный технический университет
Кафедра
Слайд 158
УТВЕРЖДАЮ
Проректор по учебной, воспитательной
аналитической и информационной
работе
УТВЕРЖДАЮ
Проректор по учебной, воспитательной
аналитической и информационной
работе
Слайд 159
СОСТАВИТЕЛИ:
Н.В. Кислов, профессор кафедры «Горные машины» Белорусского националь-
ного технического университета,
СОСТАВИТЕЛИ:
Н.В. Кислов, профессор кафедры «Горные машины» Белорусского националь-
ного технического университета,
Слайд 160
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Учебная программа дисциплины «Горные машины и оборудование»
предназначена
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Учебная программа дисциплины «Горные машины и оборудование»
предназначена

Слайд 161
пьютерных технологий в курсовом проектировании.
Организация самостоятельной работы студентов
пьютерных технологий в курсовом проектировании.
Организация самостоятельной работы студентов
Слайд 162
1 2 3 4 5
Тема 4. Классификация исполнительных органов. Бара-
банные,
1 2 3 4 5
Тема 4. Классификация исполнительных органов. Бара-
банные,
Слайд 163
Тема 3. СТАТИЧЕСКИЙ РАСЧЕТ ГОРНЫХ МАШИН
Определение центра масс машины. Внешние
Тема 3. СТАТИЧЕСКИЙ РАСЧЕТ ГОРНЫХ МАШИН
Определение центра масс машины. Внешние
Слайд 164
Тема 9. ШАГАЮЩИЕ МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ
Конструктивные схемы механизмов передвижения шагающих
Тема 9. ШАГАЮЩИЕ МЕХАНИЗМЫ ПЕРЕМЕЩЕНИЯ
Конструктивные схемы механизмов передвижения шагающих
Слайд 165
Раздел VII. БУРОВОЕ ОБОРУДОВАНИЕ
Тема 16. ОБЩИЕ СВЕДЕНИЯ И СПОСОБЫ
Раздел VII. БУРОВОЕ ОБОРУДОВАНИЕ
Тема 16. ОБЩИЕ СВЕДЕНИЯ И СПОСОБЫ
Слайд 166
ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ КУРСОВОГО ПРОЕКТА
Цель курсового проекта –
ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ТЕМ КУРСОВОГО ПРОЕКТА
Цель курсового проекта –

Слайд 168
Вопросы по курсу
«ГОРНЫЕ МАШИНЫ И ОБОРУДОВАНИЕ»
(7-й семестр)
1.
Вопросы по курсу
«ГОРНЫЕ МАШИНЫ И ОБОРУДОВАНИЕ»
(7-й семестр)
1.
Слайд 169
34. Мощность для работы бермовых фрез.
35. Мощность для работы отрезных
34. Мощность для работы бермовых фрез.
35. Мощность для работы отрезных
 Дефицит пресной воды. Миф или реальность?
Дефицит пресной воды. Миф или реальность? Основы безопасности жизнедеятельности
Основы безопасности жизнедеятельности Информационный сайт ИП Петрушенко А.А.
Информационный сайт ИП Петрушенко А.А. Обществознание
Обществознание Действия при угрозе по телефону
Действия при угрозе по телефону Энциклопедия слова Верность
Энциклопедия слова Верность Латинский язык как международный язык науки
Латинский язык как международный язык науки Защита данных от ошибок ввода
Защита данных от ошибок ввода Презентация на тему Синус и синусоиды в образах
Презентация на тему Синус и синусоиды в образах  Презентация на тему Эволюция органического мира
Презентация на тему Эволюция органического мира OS/2 — операционная система фирмы IBM.
OS/2 — операционная система фирмы IBM. Water Drop
Water Drop Кәсіпкерлік және бизнес негіздері
Кәсіпкерлік және бизнес негіздері Константин Георгиевич Паустовский
Константин Георгиевич Паустовский ПРЕЗЕНТАЦИЯ ПО РУССКОМУ ЯЗЫКУ ТЕМА: «Обобщающие слова при однородных членах предложения. Знаки препинания при обобщающих словах.
ПРЕЗЕНТАЦИЯ ПО РУССКОМУ ЯЗЫКУ ТЕМА: «Обобщающие слова при однородных членах предложения. Знаки препинания при обобщающих словах. Подготовка к ЕГЭ. Полезно знать
Подготовка к ЕГЭ. Полезно знать Формирование советской государственно-политической системы. Образование СССР
Формирование советской государственно-политической системы. Образование СССР Презентация без названия (1)
Презентация без названия (1) PR-тексты. Виды PR-текстов, их различия, ошибки и методы исправления
PR-тексты. Виды PR-текстов, их различия, ошибки и методы исправления Планирование и циклограмма аналитической деятельности в ОУ
Планирование и циклограмма аналитической деятельности в ОУ Оригами
Оригами VII Всероссийский конкурс учебно-исследовательских экологических проектов «Человек на Земле» Номинация №3 «Этнографические исс
VII Всероссийский конкурс учебно-исследовательских экологических проектов «Человек на Земле» Номинация №3 «Этнографические исс Гербы и эмблемы. 5 класс
Гербы и эмблемы. 5 класс Рекламные возможности
Рекламные возможности Электрический привод. Регулирование координат
Электрический привод. Регулирование координат Культура общения современного молодого человека
Культура общения современного молодого человека Муниципальное общеобразовательное учреждение «Средняя общеобразовательная школа №1» Номинация: компьютерный проект Тема
Муниципальное общеобразовательное учреждение «Средняя общеобразовательная школа №1» Номинация: компьютерный проект Тема  Элективный курс “English for Сareer” в системе профильного обучения
Элективный курс “English for Сareer” в системе профильного обучения