- И.М. Сидоров

Содержание
- 2. Рассматривается динамика движения на околоземной орбите тросовой системы, которая называется пращей. Праща - это два блока
- 3. Рассмотрена принципиальная возможность решения следующих задач: Прямое преобразование энергии, аккумулированной на борту космического объекта, а именно
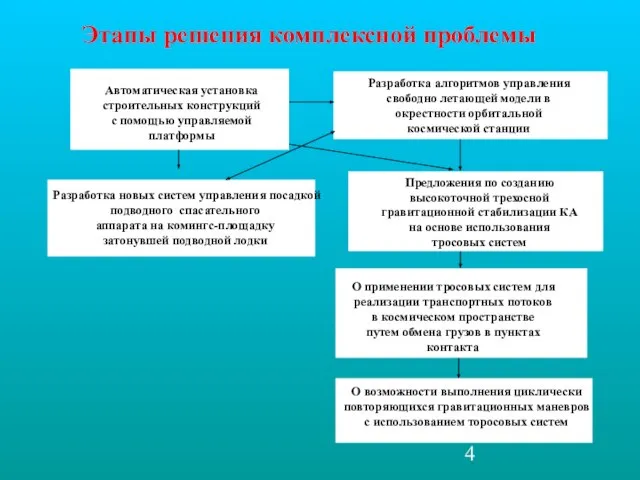
- 4. Этапы решения комплексной проблемы Автоматическая установка строительных конструкций с помощью управляемой платформы Разработка алгоритмов управления свободно
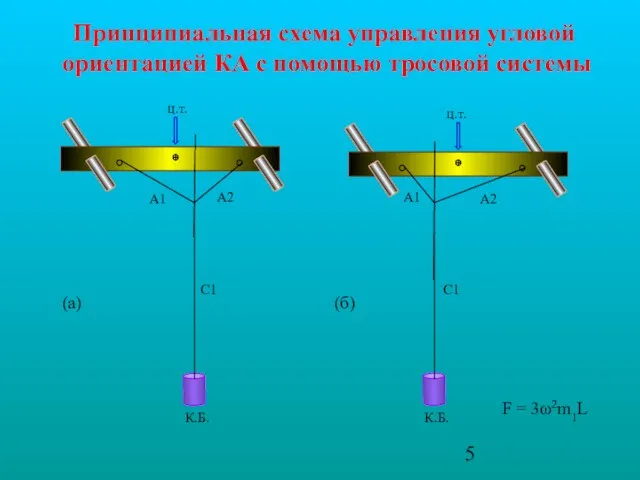
- 5. Принципиальная схема управления угловой ориентацией КА с помощью тросовой системы
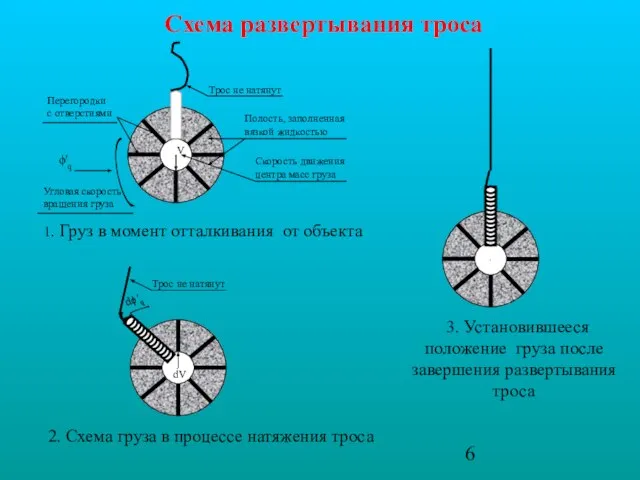
- 6. 2. Схема груза в процессе натяжения троса Схема развертывания троса
- 7. -600 600 1000 -1000 Траектория движения груза в процессе колебания Перемещение груза и его точки подвеса
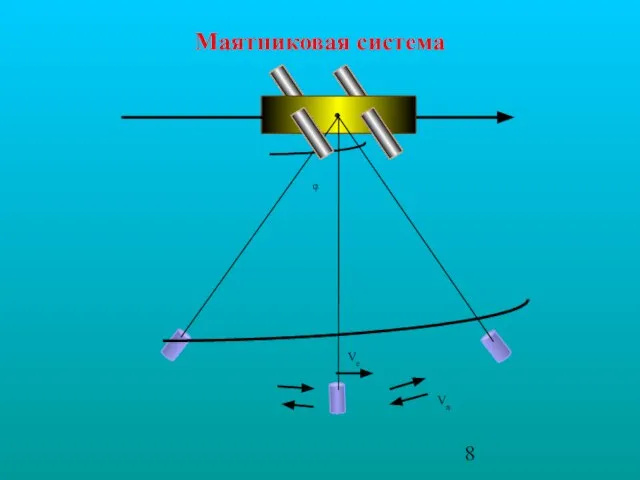
- 8. Vc Va φ Маятниковая система
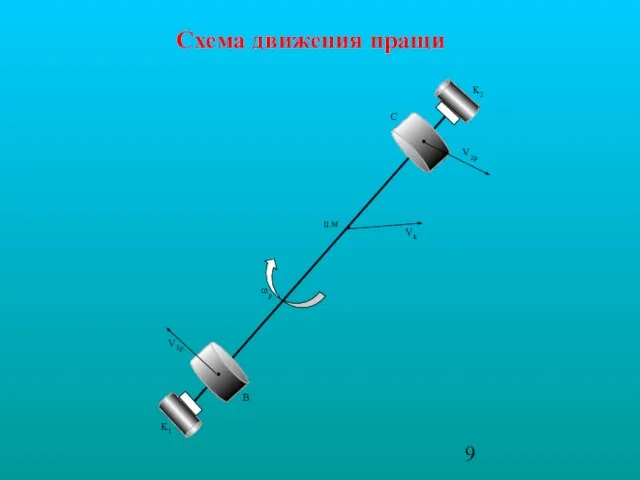
- 9. Схема движения пращи
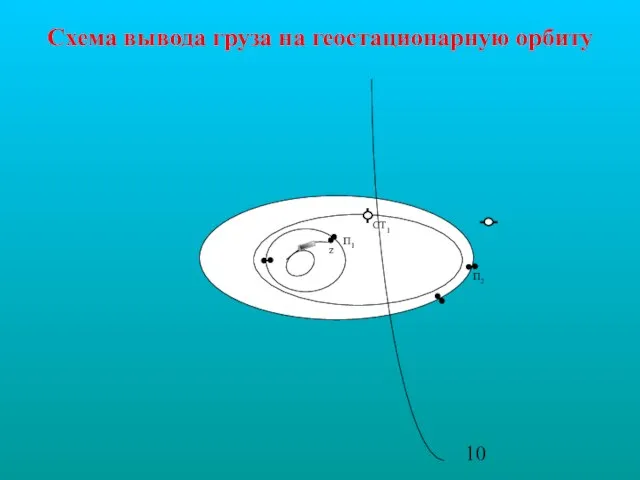
- 10. z П1 СТ1 П2 Схема вывода груза на геостационарную орбиту
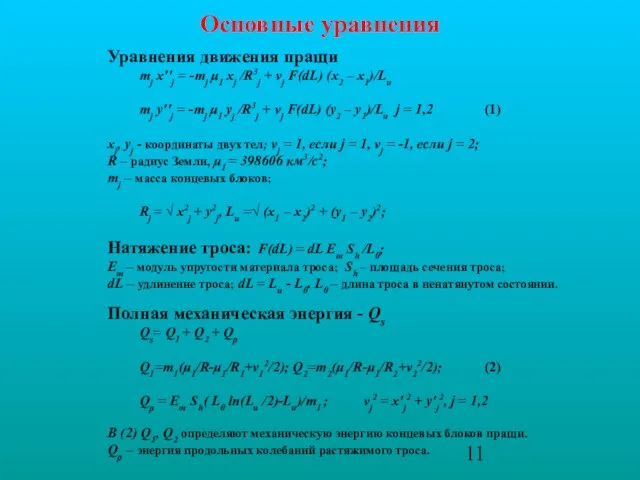
- 11. Уравнения движения пращи mj x′′j = -mj μ1 xj /R3j + νj F(dL) (x2 – x1)/Lu
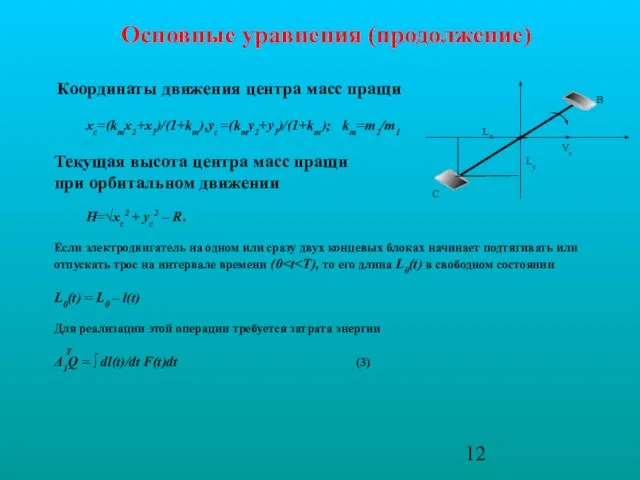
- 12. Основные уравнения (продолжение) Координаты движения центра масс пращи xc=(kmx2+x1)/(1+km),yc =(kmy2+y1)/(1+km); km=m2/m1 Текущая высота центра масс пращи
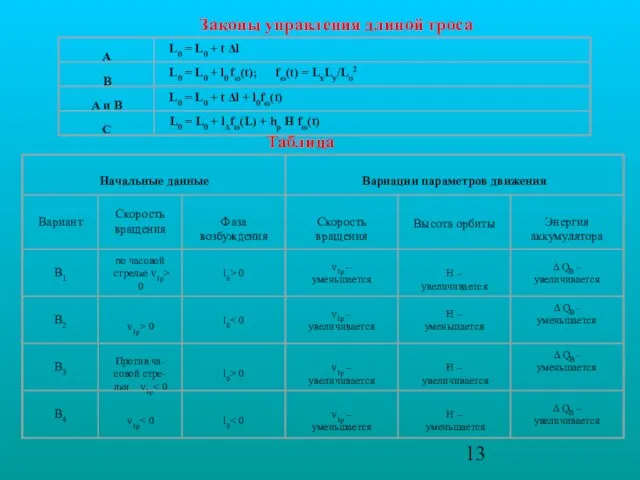
- 13. Законы управления длиной троса Таблица
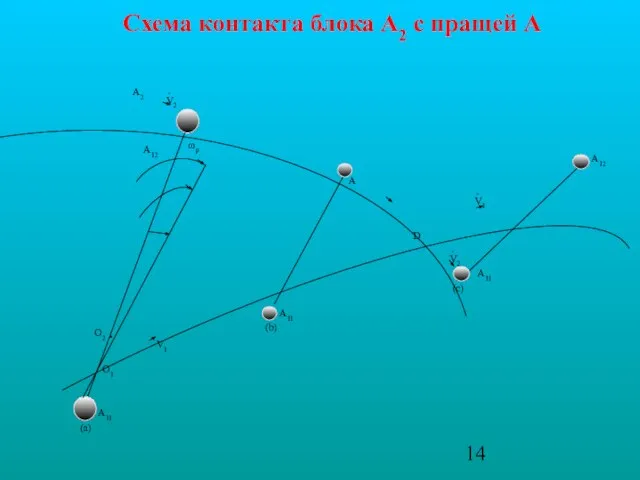
- 14. Схема контакта блока А2 с пращей А
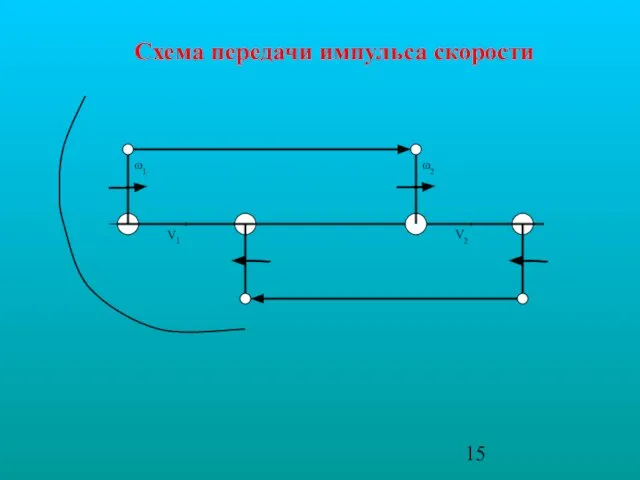
- 15. ω1 ω2 V1 V2 Схема передачи импульса скорости
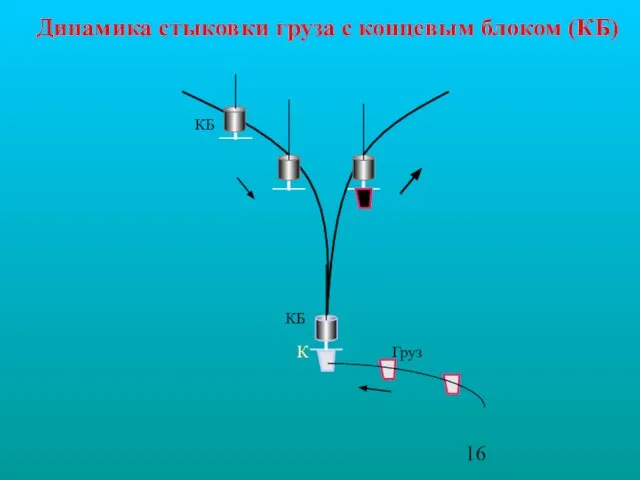
- 16. Динамика стыковки груза с концевым блоком (КБ) КБ КБ Груз К
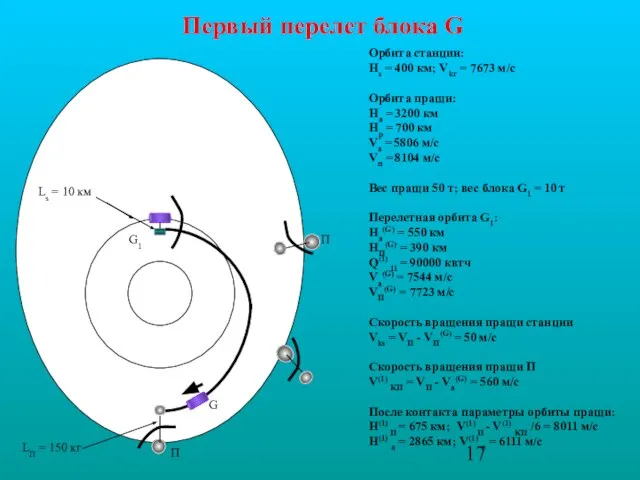
- 17. Орбита станции: Hs = 400 км; Vkr = 7673 м/с Орбита пращи: Ha = 3200 км
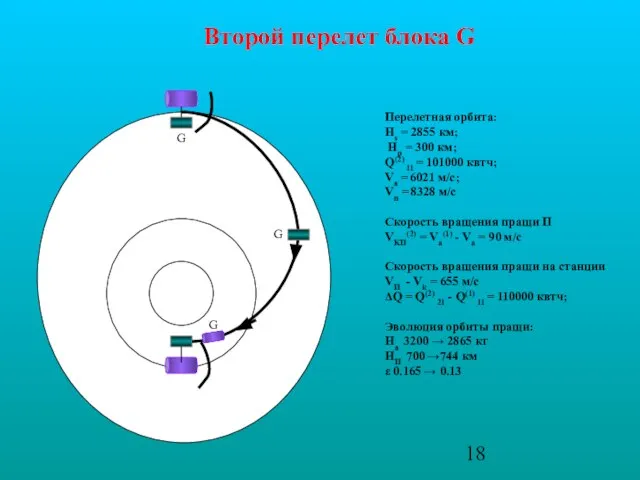
- 18. Перелетная орбита: Hs = 2855 км; Hp = 300 км; Q(2) 11 = 101000 квтч; Va
- 19. - - - ' ' ' 1.2 2.4 3.6 -1.2 -2.4 -3.6 1.4 2.4 3.6 -1.2
- 21. Скачать презентацию
Слайд 2Рассматривается динамика движения на околоземной орбите тросовой системы, которая называется пращей. Праща
Рассматривается динамика движения на околоземной орбите тросовой системы, которая называется пращей. Праща
Слайд 3Рассмотрена принципиальная возможность решения следующих задач:
Прямое преобразование энергии, аккумулированной на борту космического
Рассмотрена принципиальная возможность решения следующих задач:
Прямое преобразование энергии, аккумулированной на борту космического
Слайд 4Этапы решения комплексной проблемы
Автоматическая установка
строительных конструкций
с помощью управляемой
платформы
Разработка алгоритмов управления
свободно летающей модели
Этапы решения комплексной проблемы
Автоматическая установка
строительных конструкций
с помощью управляемой
платформы
Разработка алгоритмов управления
свободно летающей модели
Слайд 5Принципиальная схема управления угловой
ориентацией КА с помощью тросовой системы
Принципиальная схема управления угловой
ориентацией КА с помощью тросовой системы
Слайд 62. Схема груза в процессе натяжения троса
Схема развертывания троса
2. Схема груза в процессе натяжения троса
Схема развертывания троса
Слайд 7-600
600
1000
-1000
Траектория движения груза
в процессе колебания
Перемещение груза и его точки подвеса
Траектория
-600
600
1000
-1000
Траектория движения груза
в процессе колебания
Перемещение груза и его точки подвеса
Траектория

Слайд 8Vc
Va
φ
Маятниковая система
Vc
Va
φ
Маятниковая система
Слайд 9Схема движения пращи
Схема движения пращи
Слайд 10z
П1
СТ1
П2
Схема вывода груза на геостационарную орбиту
z
П1
СТ1
П2
Схема вывода груза на геостационарную орбиту
Слайд 11Уравнения движения пращи
mj x′′j = -mj μ1 xj /R3j + νj F(dL)
Уравнения движения пращи
mj x′′j = -mj μ1 xj /R3j + νj F(dL)
Слайд 12
Основные уравнения (продолжение)
Координаты движения центра масс пращи
xc=(kmx2+x1)/(1+km),yc =(kmy2+y1)/(1+km); km=m2/m1
Текущая высота центра
Основные уравнения (продолжение)
Координаты движения центра масс пращи
xc=(kmx2+x1)/(1+km),yc =(kmy2+y1)/(1+km); km=m2/m1
Текущая высота центра
Слайд 13
Законы управления длиной троса
Таблица
Законы управления длиной троса
Таблица
Слайд 14Схема контакта блока А2 с пращей А
Схема контакта блока А2 с пращей А
Слайд 15ω1
ω2
V1
V2
Схема передачи импульса скорости
ω1
ω2
V1
V2
Схема передачи импульса скорости
Слайд 16Динамика стыковки груза с концевым блоком (КБ)
КБ
КБ
Груз
К
Динамика стыковки груза с концевым блоком (КБ)
КБ
КБ
Груз
К
Слайд 17Орбита станции:
Hs = 400 км; Vkr = 7673 м/с
Орбита пращи:
Ha = 3200
Орбита станции:
Hs = 400 км; Vkr = 7673 м/с
Орбита пращи:
Ha = 3200
Слайд 18Перелетная орбита:
Hs = 2855 км;
Hp = 300 км;
Q(2) 11 = 101000
Перелетная орбита:
Hs = 2855 км;
Hp = 300 км;
Q(2) 11 = 101000
Слайд 19-
-
-
'
'
'
1.2
2.4
3.6
-1.2
-2.4
-3.6
1.4
2.4
3.6
-1.2
-2.4
-3.6
·
'
·
·
·
-4.4
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
'
'
L(0)
0
'
'
95 ч
194 ч
'
'
256 ч
'
300 ч
'
'
375 ч
'
510 ч
L
Кп 1
L
105 км
105 км
105 км
105 км
105
-
-
-
'
'
'
1.2
2.4
3.6
-1.2
-2.4
-3.6
1.4
2.4
3.6
-1.2
-2.4
-3.6
·
'
·
·
·
-4.4
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
'
'
L(0)
0
'
'
95 ч
194 ч
'
'
256 ч
'
300 ч
'
'
375 ч
'
510 ч
L
Кп 1
L
105 км
105 км
105 км
105 км
105

 Туристическая фирма САМ СТРАНА:АНДОРРА СТРАНА:АНДОРРА КУРОРТЫ:Андорра-ла-Велья/Эскальдес, Энкамп, Сольдеу-эль-Тартер, Канильо, Пас-
Туристическая фирма САМ СТРАНА:АНДОРРА СТРАНА:АНДОРРА КУРОРТЫ:Андорра-ла-Велья/Эскальдес, Энкамп, Сольдеу-эль-Тартер, Канильо, Пас- Ораторское мастерство
Ораторское мастерство Презентация на тему ОСНОВНЫЕ ПОНЯТИЯ ХИМИИ 8 класс
Презентация на тему ОСНОВНЫЕ ПОНЯТИЯ ХИМИИ 8 класс  Гендерные аспекты семейной политики Жанна Чернова НИУ-ВШЭ
Гендерные аспекты семейной политики Жанна Чернова НИУ-ВШЭ Состав слова (урок-обобщение)
Состав слова (урок-обобщение) Духовно-нравственное воспитание подрастающего поколения как государственная парадигма
Духовно-нравственное воспитание подрастающего поколения как государственная парадигма Настольный компьютер vs планшет. Кому принадлежит рынок
Настольный компьютер vs планшет. Кому принадлежит рынок Мода эпохи Возрождения
Мода эпохи Возрождения ОРДЕНА И МЕДАЛИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ
ОРДЕНА И МЕДАЛИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ Дом, где я - хозяйка
Дом, где я - хозяйка Доступное жилье повышенной комфортности. Дома и квартиры в Краснодаре
Доступное жилье повышенной комфортности. Дома и квартиры в Краснодаре Объекты культурного наследия
Объекты культурного наследия Инновационные приемы в организации исследовательской деятельности обучающихся
Инновационные приемы в организации исследовательской деятельности обучающихся Литературоведческая разминка
Литературоведческая разминка Капля никотина убивает лошадь!!!
Капля никотина убивает лошадь!!! От реформы судебной системы к реформе судебной власти
От реформы судебной системы к реформе судебной власти Клод Моне – основатель импрессионизма
Клод Моне – основатель импрессионизма Важнейшие архитектурные элементы здания
Важнейшие архитектурные элементы здания Миссия и цели службы питания в гостинице
Миссия и цели службы питания в гостинице Русский язык в плакатах, таблицах и схемах 7 класс 1 Причастие 2 Признаки прилагательного и глагола у причастия 3 Склонение прича
Русский язык в плакатах, таблицах и схемах 7 класс 1 Причастие 2 Признаки прилагательного и глагола у причастия 3 Склонение прича ФГОС как система требований к организации и осуществление образовательной деятельности
ФГОС как система требований к организации и осуществление образовательной деятельности Тест «Повязки»
Тест «Повязки» Изучение и отработка моделей поведения в условиях вынужденной и природной аномалии
Изучение и отработка моделей поведения в условиях вынужденной и природной аномалии 20131208_ozdorovitelnye_meropriyatiya_na_logp._zanyatiyakh
20131208_ozdorovitelnye_meropriyatiya_na_logp._zanyatiyakh КУЛЬТУРНАЯ ПОЛИТИКА И ИДЕОЛОГИЯ ПРАГМАТИКИ
КУЛЬТУРНАЯ ПОЛИТИКА И ИДЕОЛОГИЯ ПРАГМАТИКИ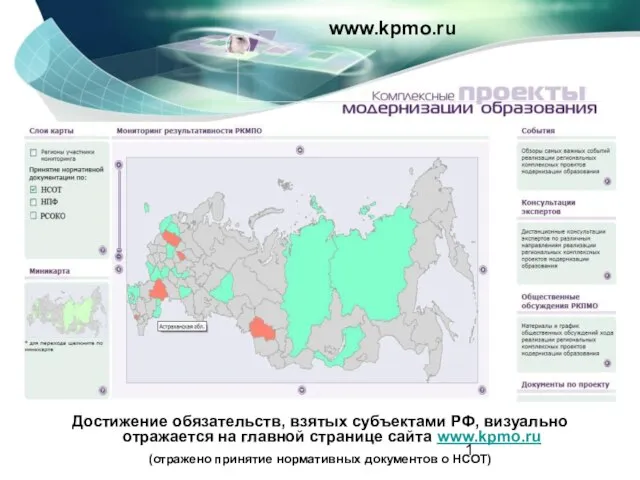 www.kpmo.ru
www.kpmo.ru Системно- деятельностный подход как методологическая основа стандартов второго поколения.
Системно- деятельностный подход как методологическая основа стандартов второго поколения. Расследование и учет несчастных случаев
Расследование и учет несчастных случаев