- Качество автоматических систем управления

Содержание
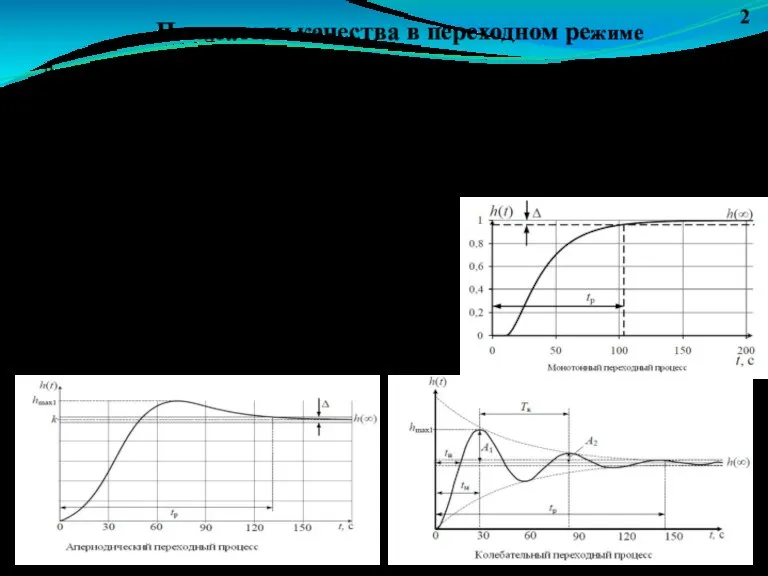
- 2. 2 Показатели качества в переходном режиме Все показатели качества делятся на показатели качества в переходном режиме
- 3. 3 Прямые оценки качества СУ определяются непосредственно по переходным процессам, вызванными изменением задания или возмущения. Переходный
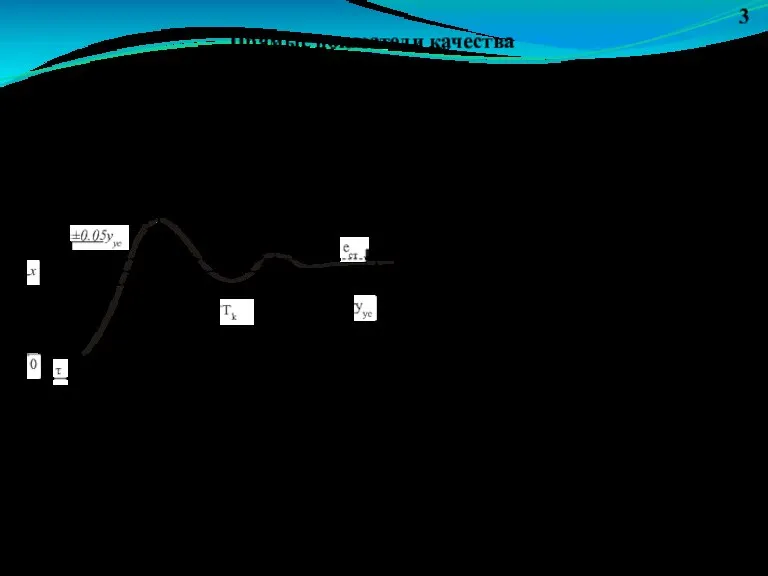
- 4. 4 1. Время переходного процесса tp (время регулирования) - минимальное время, по истечении которого отклонение выходной
- 5. 5. Время достижения первого максимума tmax определяется по графику. 6. Запаздывание τ - время от момента
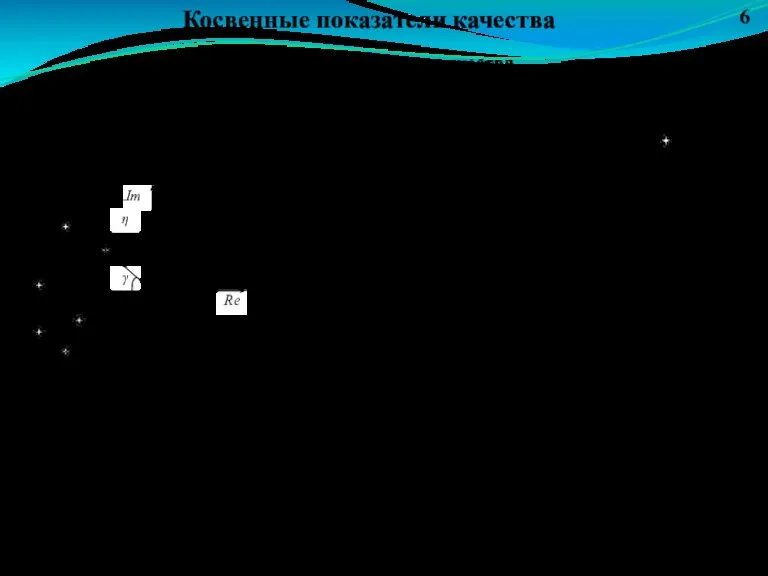
- 6. 6 Косвенные показатели качества Корневые показатели качества. Многие свойства системы можно определить при проектировании по расположению
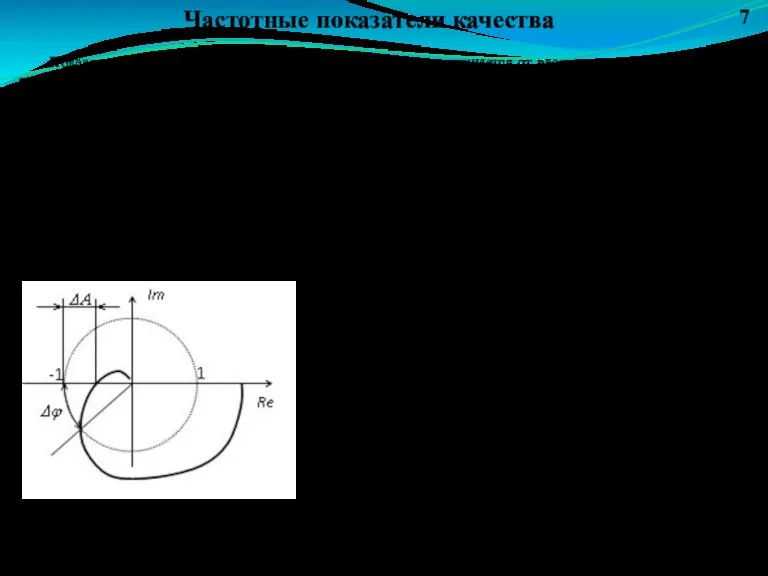
- 7. 7 Поведение реального объекта управления всегда несколько отличается от рассматриваемой модели, более того, его динамика может
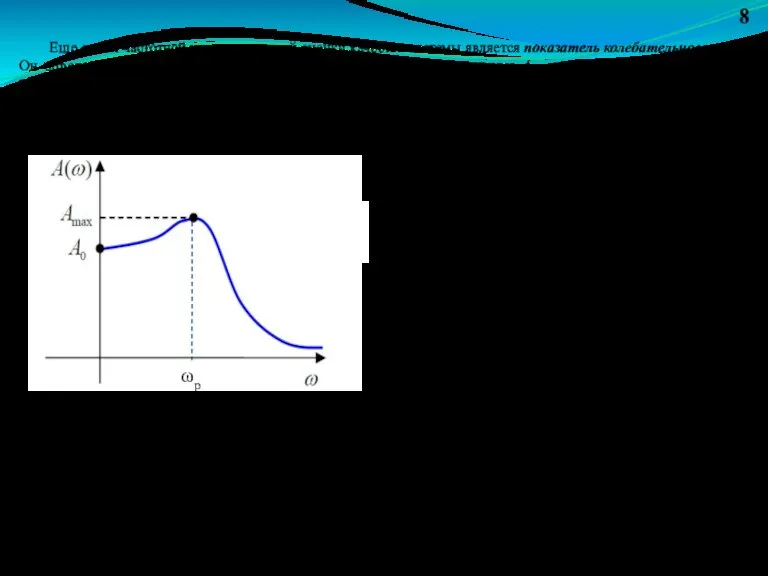
- 8. 8 Еще одной частотной характеристикой оценки качества системы является показатель колебательности M. Он определяется по АЧХ
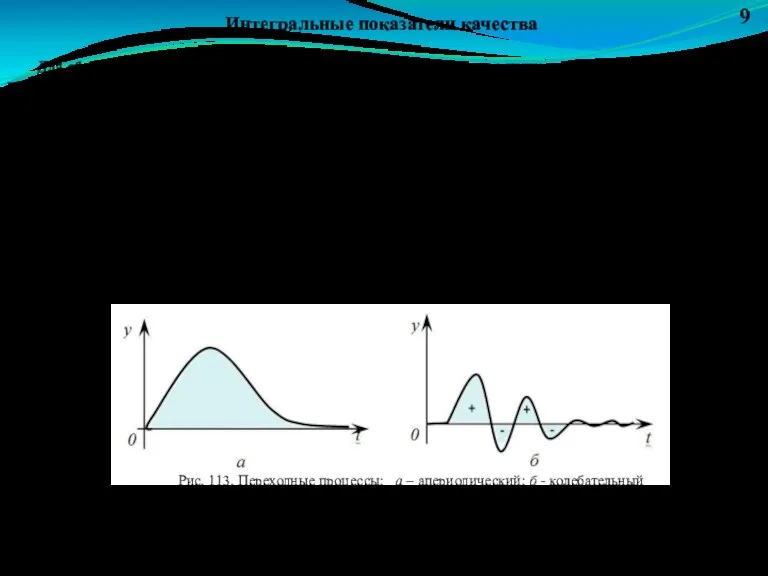
- 9. Интегральные показатели качества 9 Для обобщенной оценки быстроты затухания и величины отклонения регулируемой величины от заданной
- 10. 10 2. Квадратичная интегральная оценка: Этот показатель не зависит от знака е(t) и, следовательно, может быть
- 11. 11 Показатели качества в установившемся режиме Характеристикой качества системы в установившемся режиме является установившаяся ошибка. Когда
- 12. 12 Аналогично можно представить установившуюся ошибку от возмущения - eвf(t): Здесь Wef(s) - передаточная функция относительно
- 13. 13 Астатическая система относительно задающего воздействия обладает астатизмом n-го порядка, если Сgо = Сg1 = …
- 15. Скачать презентацию
Слайд 2
2
Показатели качества в переходном режиме
Все показатели качества делятся на показатели качества
2
Показатели качества в переходном режиме
Все показатели качества делятся на показатели качества
Слайд 3
3
Прямые оценки качества СУ определяются непосредственно по переходным процессам, вызванными изменением
3
Прямые оценки качества СУ определяются непосредственно по переходным процессам, вызванными изменением
Слайд 4
4
1. Время переходного процесса tp (время регулирования) - минимальное время, по
4
1. Время переходного процесса tp (время регулирования) - минимальное время, по
Слайд 55. Время достижения первого максимума tmax определяется по графику.
6. Запаздывание τ -
6. Запаздывание τ -
Слайд 6
6
Косвенные показатели качества
Корневые показатели качества.
Многие свойства системы можно определить при
6
Косвенные показатели качества
Корневые показатели качества.
Многие свойства системы можно определить при
Слайд 77
Поведение реального объекта управления всегда несколько отличается от рассматриваемой модели, более того,
7
Поведение реального объекта управления всегда несколько отличается от рассматриваемой модели, более того,
Слайд 88
Еще одной частотной характеристикой оценки качества системы является показатель колебательности M. Он
8
Еще одной частотной характеристикой оценки качества системы является показатель колебательности M. Он
Слайд 9Интегральные показатели качества
9
Для обобщенной оценки быстроты затухания и величины отклонения регулируемой величины
Интегральные показатели качества
9
Для обобщенной оценки быстроты затухания и величины отклонения регулируемой величины
Слайд 1010
2. Квадратичная интегральная оценка:
Этот показатель не зависит от знака е(t) и, следовательно,
10
2. Квадратичная интегральная оценка:
Этот показатель не зависит от знака е(t) и, следовательно,

Слайд 1111
Показатели качества в установившемся режиме
Характеристикой качества системы в установившемся режиме является установившаяся
11
Показатели качества в установившемся режиме
Характеристикой качества системы в установившемся режиме является установившаяся
Слайд 1212
Аналогично можно представить установившуюся ошибку от возмущения - eвf(t):
Здесь Wef(s) - передаточная
12
Аналогично можно представить установившуюся ошибку от возмущения - eвf(t):
Здесь Wef(s) - передаточная
Слайд 1313
Астатическая система относительно задающего воздействия обладает астатизмом n-го порядка, если
Сgо = Сg1
13
Астатическая система относительно задающего воздействия обладает астатизмом n-го порядка, если
Сgо = Сg1
 От рукописи к кибертелепатии
От рукописи к кибертелепатии Теории личности
Теории личности Экспериментальная экономика для начинающих
Экспериментальная экономика для начинающих Некоммерческое партнёрство
Некоммерческое партнёрство Трудовое право. Человек и общество в XXI веке
Трудовое право. Человек и общество в XXI веке Презентация на тему Правописание буквосочетаний чу-щу
Презентация на тему Правописание буквосочетаний чу-щу Земля под застройку на побережье Балтийского моря в курортной зоне в Калининградской области. Инвестиционное предложение
Земля под застройку на побережье Балтийского моря в курортной зоне в Калининградской области. Инвестиционное предложение Св.Николай Японский. Дневник
Св.Николай Японский. Дневник Политическая сфера
Политическая сфера Group Speech
Group Speech ГУД открывает охоту на устриц!ГУД приглашает заядлых и начинающих охотников за инвесторами, полезными связями и свежими устрицам
ГУД открывает охоту на устриц!ГУД приглашает заядлых и начинающих охотников за инвесторами, полезными связями и свежими устрицам Интерференция
Интерференция Комната социально-бытовой адаптации
Комната социально-бытовой адаптации «Основы журналистики»
«Основы журналистики» Лидерство в сфере учета. Мнения сотрудников. IKEA Business STO342
Лидерство в сфере учета. Мнения сотрудников. IKEA Business STO342 Презентация на тему Профессиональный стандарт педагога
Презентация на тему Профессиональный стандарт педагога Использование трафаретов на уроках биологии Учитель биологии МОУ «СОШ №15 с УИОП» Бойкова Ирина Юрьевна
Использование трафаретов на уроках биологии Учитель биологии МОУ «СОШ №15 с УИОП» Бойкова Ирина Юрьевна Презентация на тему Методика Марии Монтессори
Презентация на тему Методика Марии Монтессори  Топиарии
Топиарии Деление У-2
Деление У-2 Презентация на темум Время глагола 2 класс
Презентация на темум Время глагола 2 класс Проект «Богатство русского языка»
Проект «Богатство русского языка» Клуб авторской песни КРЕДО приглашает всех друзей на праздничный концерт
Клуб авторской песни КРЕДО приглашает всех друзей на праздничный концерт Восточный институт
Восточный институт Задания ЕГЭ
Задания ЕГЭ Тойымбетов От кабынын саулелик анатомиясы
Тойымбетов От кабынын саулелик анатомиясы Презентация на тему Организмы в Мировом океане 6 класс
Презентация на тему Организмы в Мировом океане 6 класс Село Берлик Мойынкумского района
Село Берлик Мойынкумского района