- Компоненты робототехники и сенсорика

Содержание
- 2. Описание технологии Роботы предназначены для замены человека при выполнении рутинных, грязных, опасных работ, а также там,
- 3. Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух, обоняние, осязание и
- 4. Если окунуться в историю... Первое появление слова «робот» относится к 1920 году, когда чешский писатель Карел
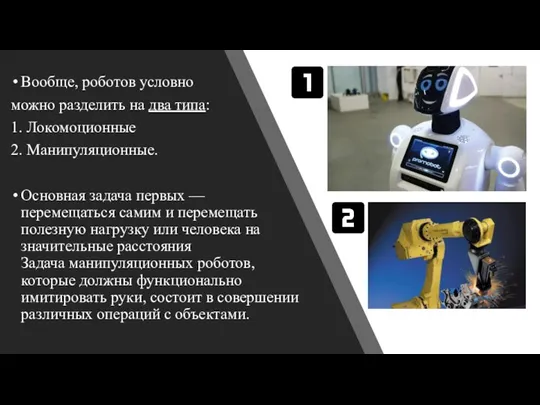
- 5. Вообще, роботов условно можно разделить на два типа: 1. Локомоционные 2. Манипуляционные. Основная задача первых —
- 6. Компании лидеры за рубежом iIRobot (США)- это публичная компания с фокусом на мобильную робототехнику. Первоначально ориентировалась
- 7. Компании лидеры в России Аэроксо Компания разрабатывает и производит беспилотные летательные аппараты — конвертопланы. Аппараты работают
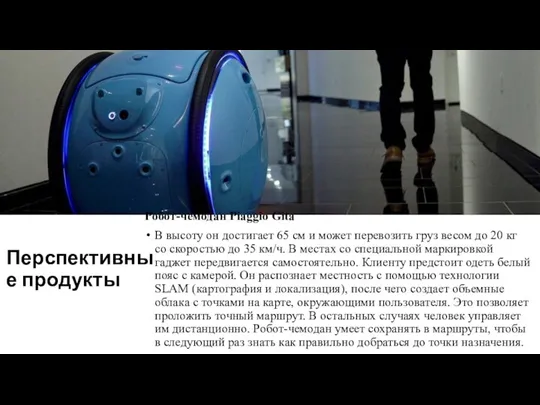
- 8. Перспективные продукты Робот-чемодан Piaggio Gita В высоту он достигает 65 см и может перевозить груз весом
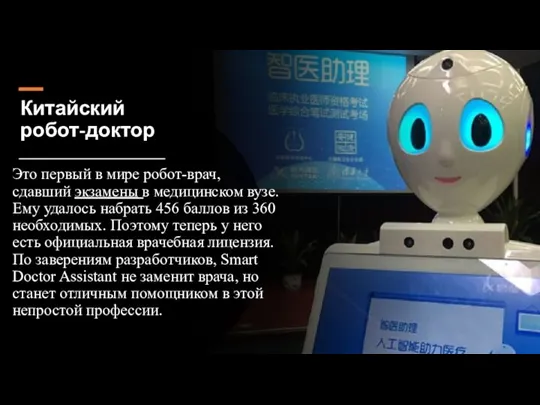
- 9. Китайский робот-доктор Это первый в мире робот-врач, сдавший экзамены в медицинском вузе. Ему удалось набрать 456
- 10. Субтехнологии 1. Сенсоры и цифровые компоненты робототехнических комплексов для человекомашинного взаимодействия В состав субтехнологии входят алгоритмы,
- 11. Технологии сенсорно-моторной координации и пространственного позиционирования В рамках субтехнологии рассматриваются задачи разработки новых приводов различных типов,
- 12. Сенсоры и обработка сенсорной информации Субтехнология включает в себя технологии создания электронной компонентной базы сенсоров, сенсорных
- 13. Мы привыкли считать, что человек – венец творения. Стоя на верхней ступени эволюции, он приспособился использовать
- 14. Но справедливости ради, стоит отметить, что, несмотря на развитие и разнообразие, роботы даже спустя 10 лет
- 15. Состав нашей команды Каманина Алина, 15 лет, МБОУ СОШ №1 г. Вытегра, 9А класс Дмитрий Кобзев,
- 16. Ход нашей работы в TRELLO
- 17. далее...
- 19. Скачать презентацию
Слайд 2Описание технологии
Роботы предназначены для замены человека при выполнении рутинных, грязных, опасных работ,
Описание технологии
Роботы предназначены для замены человека при выполнении рутинных, грязных, опасных работ,

Слайд 3Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух,
Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух,
Слайд 4Если окунуться в историю...
Первое появление слова «робот» относится к 1920 году, когда чешский
Если окунуться в историю...
Первое появление слова «робот» относится к 1920 году, когда чешский

Слайд 5Вообще, роботов условно
можно разделить на два типа:
1. Локомоционные
2. Манипуляционные.
Основная задача первых
Вообще, роботов условно
можно разделить на два типа:
1. Локомоционные
2. Манипуляционные.
Основная задача первых
Слайд 6Компании лидеры за рубежом
iIRobot (США)- это публичная компания с фокусом на мобильную робототехнику. Первоначально ориентировалась на заказы военных,
Компании лидеры за рубежом
iIRobot (США)- это публичная компания с фокусом на мобильную робототехнику. Первоначально ориентировалась на заказы военных,
Слайд 7Компании лидеры в России
Аэроксо
Компания разрабатывает и производит беспилотные летательные аппараты — конвертопланы.
Компании лидеры в России
Аэроксо
Компания разрабатывает и производит беспилотные летательные аппараты — конвертопланы.
Слайд 8Перспективные продукты
Робот-чемодан Piaggio Gita
В высоту он достигает 65 см и может перевозить
Перспективные продукты
Робот-чемодан Piaggio Gita
В высоту он достигает 65 см и может перевозить
Слайд 9Китайский робот-доктор
Это первый в мире робот-врач, сдавший экзамены в медицинском вузе. Ему
Китайский робот-доктор
Это первый в мире робот-врач, сдавший экзамены в медицинском вузе. Ему
Слайд 10Субтехнологии
1. Сенсоры и цифровые компоненты робототехнических комплексов для человекомашинного взаимодействия
В состав субтехнологии входят алгоритмы, цифровые компоненты и сенсорные системы для
Субтехнологии
1. Сенсоры и цифровые компоненты робототехнических комплексов для человекомашинного взаимодействия
В состав субтехнологии входят алгоритмы, цифровые компоненты и сенсорные системы для

Слайд 11 Технологии сенсорно-моторной координации и пространственного позиционирования
В рамках субтехнологии рассматриваются задачи разработки новых приводов различных
Технологии сенсорно-моторной координации и пространственного позиционирования
В рамках субтехнологии рассматриваются задачи разработки новых приводов различных
Слайд 12Сенсоры и обработка сенсорной информации
Субтехнология включает в себя технологии создания электронной компонентной базы сенсоров,
Сенсоры и обработка сенсорной информации
Субтехнология включает в себя технологии создания электронной компонентной базы сенсоров,
Слайд 13Мы привыкли считать, что человек – венец творения. Стоя на верхней ступени
Мы привыкли считать, что человек – венец творения. Стоя на верхней ступени
Слайд 14Но справедливости ради, стоит отметить, что, несмотря на развитие и разнообразие, роботы
Но справедливости ради, стоит отметить, что, несмотря на развитие и разнообразие, роботы
Слайд 15Состав нашей команды
Каманина Алина, 15 лет, МБОУ СОШ №1 г. Вытегра, 9А
Состав нашей команды
Каманина Алина, 15 лет, МБОУ СОШ №1 г. Вытегра, 9А

Слайд 16Ход нашей работы в TRELLO
Ход нашей работы в TRELLO
Слайд 17далее...
далее...
 Программно-методический комплекс ОРГ-МАСТЕР ®Графикс
Программно-методический комплекс ОРГ-МАСТЕР ®Графикс English speaking countries
English speaking countries Сады сбываются. Сад по-новому
Сады сбываются. Сад по-новому Презентация на тему Педагогический опыт работы учителя английского языка
Презентация на тему Педагогический опыт работы учителя английского языка The PIR-PSD current release 78.03, November 24, 2003, contains 283366 entries. 65 proteins The PIR was established in 1984 by the National Biomedical.
The PIR-PSD current release 78.03, November 24, 2003, contains 283366 entries. 65 proteins The PIR was established in 1984 by the National Biomedical. Проектирование региональных МИС
Проектирование региональных МИС Всероссийский физкультурно - спортивный комплекс Готов к труду и обороне (ГТО)
Всероссийский физкультурно - спортивный комплекс Готов к труду и обороне (ГТО) Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП
Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП Выбор
Выбор Считалки на английском
Считалки на английском  Развитие социальной психологии
Развитие социальной психологии Историческое развитие человечества: поиски социальной макротеории
Историческое развитие человечества: поиски социальной макротеории Коммерческое предложение по ГБО для таксомоторных парков от Гарант-Газ
Коммерческое предложение по ГБО для таксомоторных парков от Гарант-Газ Государственная Третьяковская галерея
Государственная Третьяковская галерея Космограммы студентов
Космограммы студентов Об организации работы в УПФР в Увинском районе по приему и обработке заявлений о перерасчете по нестраховым периодам
Об организации работы в УПФР в Увинском районе по приему и обработке заявлений о перерасчете по нестраховым периодам Республике Карелия 85 лет
Республике Карелия 85 лет Современный мир 10 класс
Современный мир 10 класс Архитектурный дизайн городской среды
Архитектурный дизайн городской среды Омплексное решение для вашего бизнеса
Омплексное решение для вашего бизнеса Stratagy of future
Stratagy of future Открытый урок
Открытый урок 79a28ae3aada471eb2bf6b04f93de9cc
79a28ae3aada471eb2bf6b04f93de9cc Тренинг по решению конфликтов среди подростков
Тренинг по решению конфликтов среди подростков Правописание гласных после шипящих и Ц
Правописание гласных после шипящих и Ц «Мой край родной, люблю тебя...»(создание экскурсионного маршрута)
«Мой край родной, люблю тебя...»(создание экскурсионного маршрута) Мосгормаш -технопарк будущего
Мосгормаш -технопарк будущего Обеспечение
Обеспечение