Контроль объектов авиационного оборудования в условиях априорной неопределенности диагностических моделей. Тема 5
- Контроль объектов авиационного оборудования в условиях априорной неопределенности диагностических моделей. Тема 5

Содержание
- 2. – Структурная неопределенность возникает в тех случаях, когда не все параметры, характеризующие функционирование ДС, включаются в
- 3. Для компенсации (парирования) неопределенностей диагностических моделей ОК применяют следующие подходы: робастные; адаптивные; гарантирующие; подходы, учитывающие нечеткость
- 4. Робастные подходы обеспечивают нечувствительность алгоритмов контроля к малым отклонениям от априорных предположений о параметрах диагностической модели;
- 5. 5.2 Постановка и решение задачи оценивания параметров состояния ДС в условиях априорной неопределенности
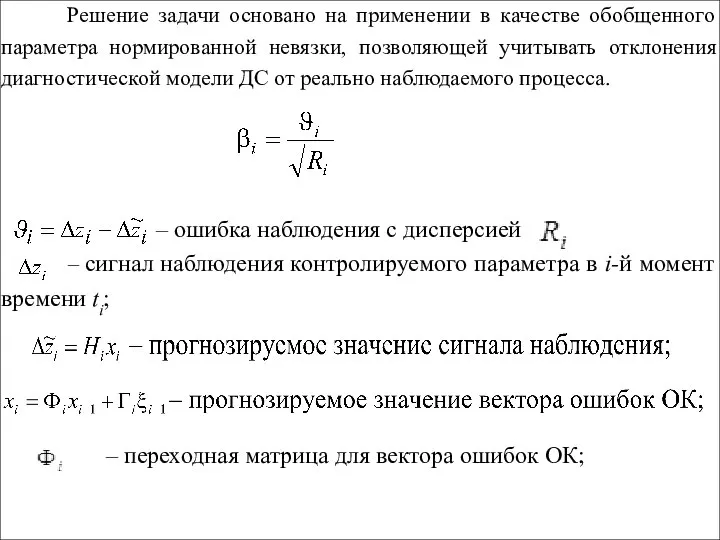
- 6. Решение задачи основано на применении в качестве обобщенного параметра нормированной невязки, позволяющей учитывать отклонения диагностической модели
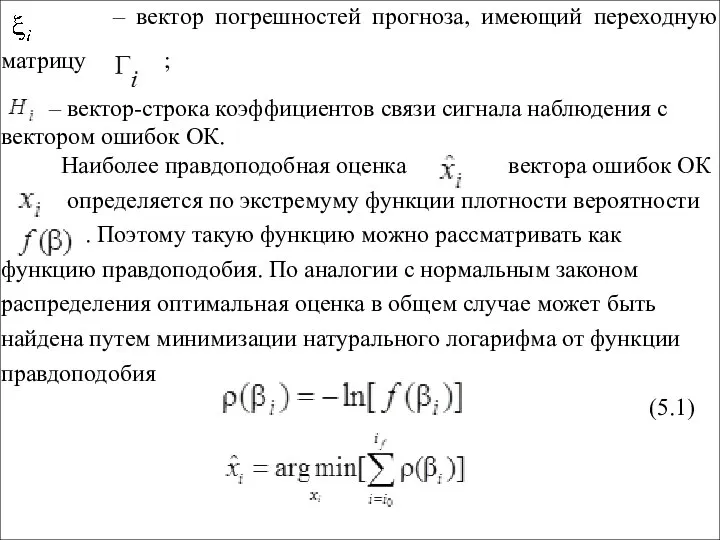
- 7. – вектор погрешностей прогноза, имеющий переходную матрицу ; – вектор-строка коэффициентов связи сигнала наблюдения с вектором
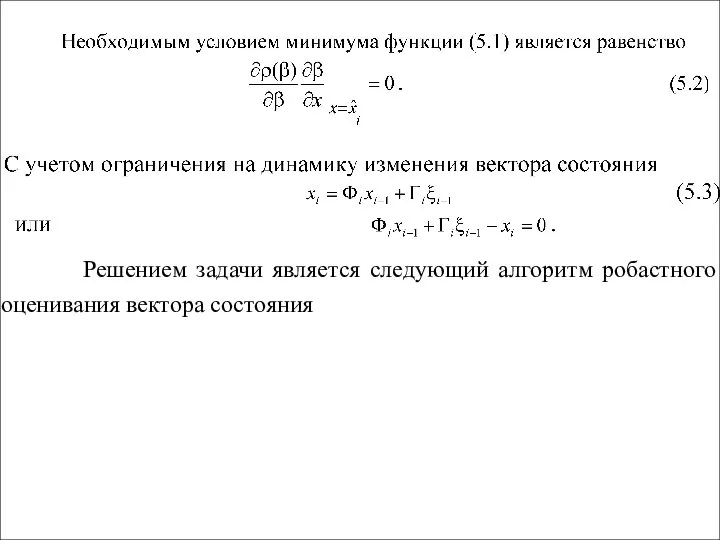
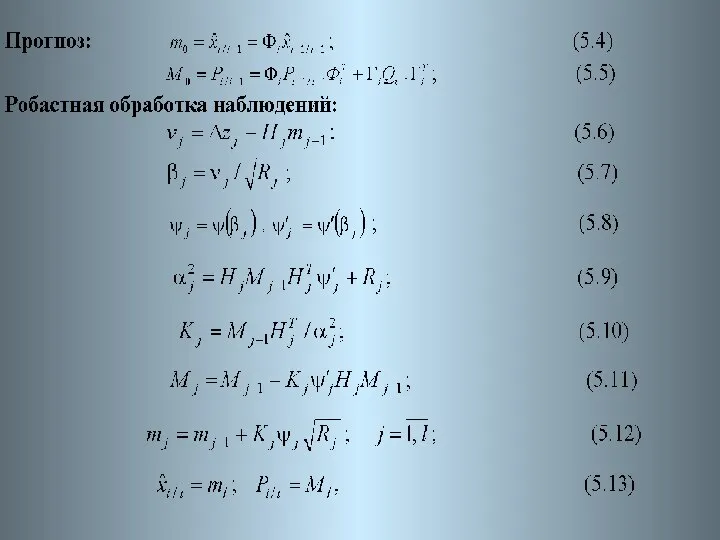
- 8. Решением задачи является следующий алгоритм робастного оценивания вектора состояния
- 11. Скачать презентацию
Слайд 3
Для компенсации (парирования) неопределенностей
диагностических моделей ОК применяют следующие
Для компенсации (парирования) неопределенностей
диагностических моделей ОК применяют следующие
Слайд 4
Робастные подходы обеспечивают нечувствительность алгоритмов контроля к малым отклонениям от
Робастные подходы обеспечивают нечувствительность алгоритмов контроля к малым отклонениям от
Слайд 55.2 Постановка и решение задачи оценивания параметров состояния ДС в условиях априорной
5.2 Постановка и решение задачи оценивания параметров состояния ДС в условиях априорной
Слайд 6 Решение задачи основано на применении в качестве обобщенного параметра нормированной невязки,
Решение задачи основано на применении в качестве обобщенного параметра нормированной невязки,
Слайд 7 – вектор погрешностей прогноза, имеющий переходную матрицу ;
– вектор-строка коэффициентов
– вектор погрешностей прогноза, имеющий переходную матрицу ;
– вектор-строка коэффициентов
Слайд 8
Решением задачи является следующий алгоритм робастного оценивания вектора состояния
Решением задачи является следующий алгоритм робастного оценивания вектора состояния
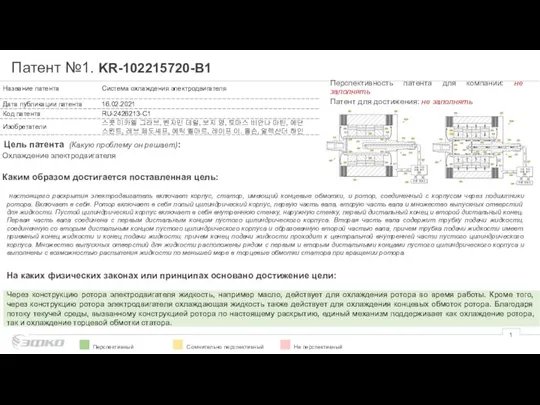 Патент №1. KR-102215720-B1
Патент №1. KR-102215720-B1 Презентация на тему Постэмбриональное развитие
Презентация на тему Постэмбриональное развитие  Универсальные приводы для обработки продуктов
Универсальные приводы для обработки продуктов Севастопольские рассказы
Севастопольские рассказы Клиника “BIOMED”
Клиника “BIOMED” МОУ средняя общеобразовательная школа №2 р.п. Колышлей
МОУ средняя общеобразовательная школа №2 р.п. Колышлей «Участие нижегородского ополчения в Отечественной войне 1812 года»
«Участие нижегородского ополчения в Отечественной войне 1812 года» Эдгар Аллан По (1809-1849)
Эдгар Аллан По (1809-1849) Устройство для искоренения зла. Ванкувер. Канада
Устройство для искоренения зла. Ванкувер. Канада Я хороший добрый человек, всем детям в классе я желаю здоровья, радости, жить в ладу со своей совестью.
Я хороший добрый человек, всем детям в классе я желаю здоровья, радости, жить в ладу со своей совестью. 11кл. Графики функций y=√(n&x)_ (11 класс)
11кл. Графики функций y=√(n&x)_ (11 класс) Моделирование работы фундаментов, состоящих из свай, не погруженных до проектных отметок
Моделирование работы фундаментов, состоящих из свай, не погруженных до проектных отметок Русский писатель, поэт, переводчик; член-корреспондент императорской Академии наук по разряду русского языка и словесности (1860). Яв
Русский писатель, поэт, переводчик; член-корреспондент императорской Академии наук по разряду русского языка и словесности (1860). Яв Презентация на тему Внутреннее строение рыб
Презентация на тему Внутреннее строение рыб  США 1945-1960
США 1945-1960 Построение правил для автоматического извлечения словосочетаний из текста
Построение правил для автоматического извлечения словосочетаний из текста Российско-китайское сотрудничество в области разработки дистанционных образовательных программ в условиях пандемии
Российско-китайское сотрудничество в области разработки дистанционных образовательных программ в условиях пандемии Инфекционное отделение для детей до 1 года
Инфекционное отделение для детей до 1 года Candy GO4106-07S
Candy GO4106-07S ГТО на родине первого космонавта
ГТО на родине первого космонавта Парни выбирают спорт
Парни выбирают спорт Мониторинг земель района добычи полезных ископаемых на территории города Березники Пермского края
Мониторинг земель района добычи полезных ископаемых на территории города Березники Пермского края Презентация на тему Десять советов родителям
Презентация на тему Десять советов родителям  Промышленная упаковка. Уважаемые господа! Работая на рынке изготовления и реализации упаковки более семи лет, а так же используя м
Промышленная упаковка. Уважаемые господа! Работая на рынке изготовления и реализации упаковки более семи лет, а так же используя м Расширенное заседание коллегии управления ТЭК и ЖКХ области
Расширенное заседание коллегии управления ТЭК и ЖКХ области Электролитическая диссоциация химических элементов
Электролитическая диссоциация химических элементов Повседневная жизнь народов Нижегородского края
Повседневная жизнь народов Нижегородского края УНИВЕСАЛЬНОЕ УСТРОЙСТВО для работы с информацией
УНИВЕСАЛЬНОЕ УСТРОЙСТВО для работы с информацией