- Курс лекций по дисциплине «Технические средства автоматизации и управления»

Содержание
- 2. Список литературы 1. Кремлевский П. П. – Расходомеры и счетчики количества веществ (2-е книги) – С-П.:
- 3. Список литературы 6. Логачев В.Г., Разработка средств автоматического контроля размеров движущихся изделий с неустойчивыми и сложными
- 4. Первичные преобразователи Первичным преобразователем (ПП) перемещения называется устройство, воспринимающее контролируемое входное перемещение (линейное или угловое) и
- 5. Классификация первичных преобразователей ПП могут классифицироваться по различным признакам, основными из которых являются: характер измеряемых перемещений,
- 6. Классификация первичных преобразователей электромеханические: электроконтактные (основанные на эффекте резкого изменения сопротивления парных электроконтактов при их замыкании
- 7. Классификация измерений Прямое измерение – измерение, при котором искомое значение величины получают непосредственно. Например, измерение температуры
- 8. Средства измерений Средство измерений – это техническое средство (или комплекс технических средств), предназначенное для измерений, имеющее
- 9. Запорная арматура Трубопроводная арматура предназначена для управления потоками нефти, транспортируемыми по трубопроводам. По принципу действия арматура
- 10. Запорная арматура Регуляторами давления называются устройства, служащие для автоматического поддержания давления на требуемом уровне. В соответствии
- 11. Задвижки
- 12. Автоматизация производства Автоматизация производства - процесс в развитии машинного производства, при котором функции управления и контроля,
- 13. Методы автоматизации производства Во-первых, разрабатывают методы эффективного изучения закономерностей объектов управления, их динамики, устойчивости, зависимости поведения
- 14. Методы автоматизации производства Во-вторых, определяют экономически целесообразные методы управления, тщательно обосновывают цель и оценочную функцию управления,
- 15. Методы автоматизации производства В-третьих, ставится задача создания инженерных методов наиболее простого, надёжного и эффективного воплощения структуры
- 16. Средства автоматизации Технические средства автоматизации - приборы, устройства и технические системы, предназначенные для автоматизации производства. Т.
- 17. Методы и приборы измерения температуры Под температурой понимают степень нагретости вещества. Физические свойства нефти (плотность, вязкость,
- 18. Датчик температуры Метран - 274
- 19. Датчик температуры Метран - 274 Датчик состоит из электронного преобразователя с выходным сигналом 4-20 мА и
- 20. Датчик температуры ТС 5008
- 21. Датчик температуры ТС 5008 Датчик предназначен для непрерывного преобразования температуры жидкостей и газов в унифицированный токовый
- 22. Датчики температуры ТСМУ 0104, ТСПУ 0104
- 23. Датчики температуры ТСМУ 0104, ТСПУ 0104 Термопреобразователи с унифицированным выходным сигналом ТСМУ 0104, ТСПУ 0104 предназначены
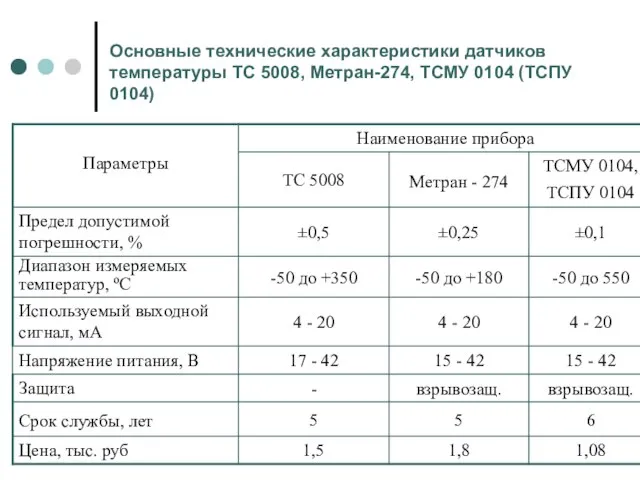
- 24. Основные технические характеристики датчиков температуры ТС 5008, Метран-274, ТСМУ 0104 (ТСПУ 0104)
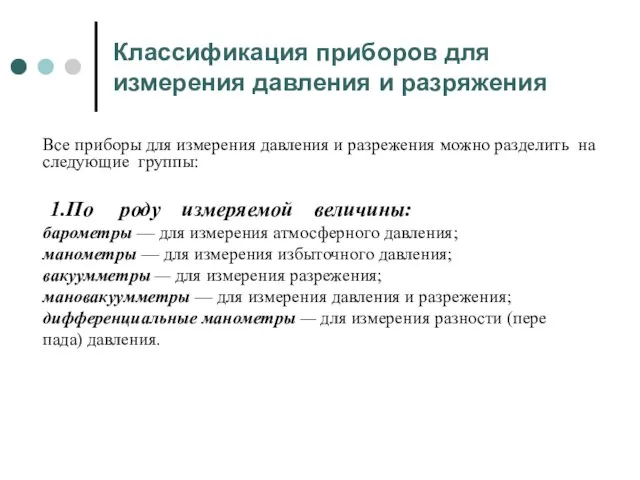
- 25. Классификация приборов для измерения давления и разряжения Все приборы для измерения давления и разрежения можно разделить
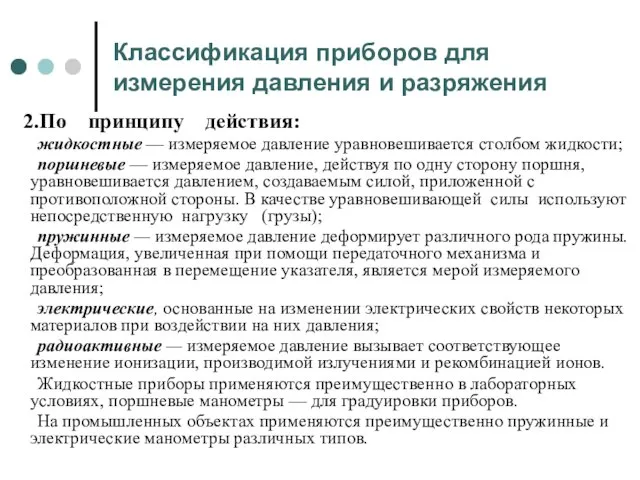
- 26. Классификация приборов для измерения давления и разряжения 2.По принципу действия: жидкостные — измеряемое давление уравновешивается столбом
- 27. Датчик давления Сапфир–22–ДИ–Ex
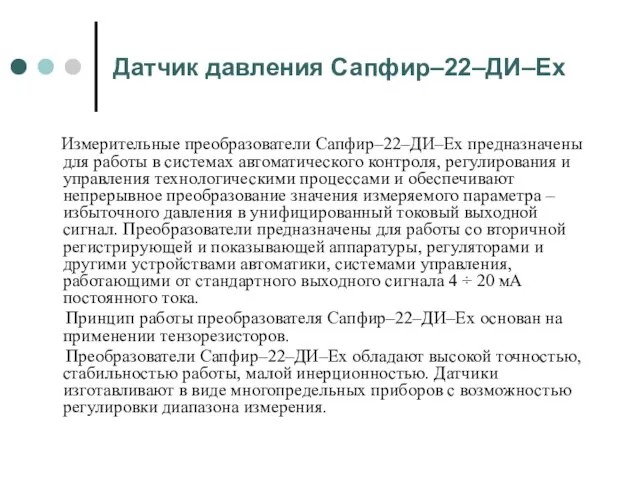
- 28. Датчик давления Сапфир–22–ДИ–Ex Измерительные преобразователи Сапфир–22–ДИ–Ex предназначены для работы в системах автоматического контроля, регулирования и управления
- 29. Датчик давления Метран–43ДИ–Ех
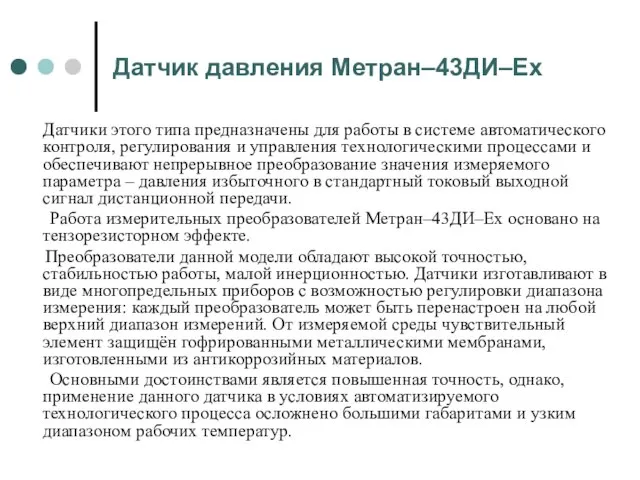
- 30. Датчик давления Метран–43ДИ–Ех Датчики этого типа предназначены для работы в системе автоматического контроля, регулирования и управления
- 31. Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД
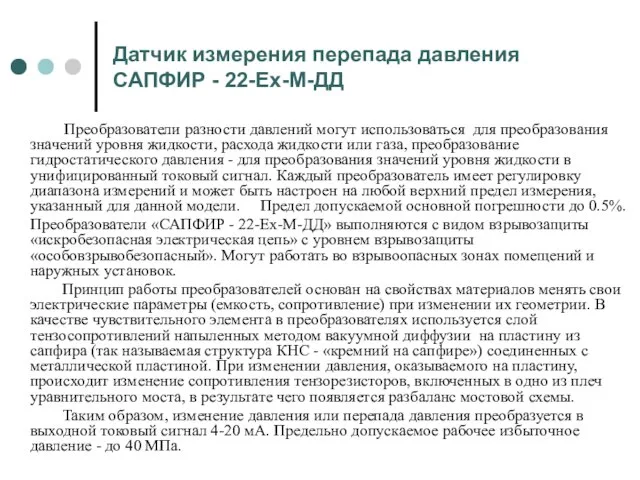
- 32. Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД Преобразователи разности давлений могут использоваться для преобразования значений уровня
- 33. Основные технические характеристики датчиков давления Сапфир–22–ДИ–Ex, Метран–43ДИ–Ех, Сапфир - 22-Ех-М-ДД
- 34. Ультразвуковые уровнемеры Ультразвуковой акустический уровнемер ЭХО-5
- 35. Принцип действия ультразвуковых уровнемеров Ультразвуковые бесконтактные уровнемеры осуществляют зондирование рабочей зоны волнами ультразвука, т.е. волнами давления
- 36. Принцип действия ультразвуковых уровнемеров Как правило, наиболее распространен вариант установки ультразвукового датчика в верхней части емкости.
- 37. Микроволновые радарные уровнемеры
- 38. Микроволновые радарные уровнемеры Микроволновые радарные уровнемеры – наиболее сложные и высокотехнологичные средства измерения уровня. Для зондирования
- 39. Микроволновые радарные уровнемеры Радарные уровнемеры - наиболее универсальные средства измерения уровня. Не имея непосредственного контакта с
- 40. Буйковый метод определения уровня Буйковый уровнемер Сапфир-22 ДУ
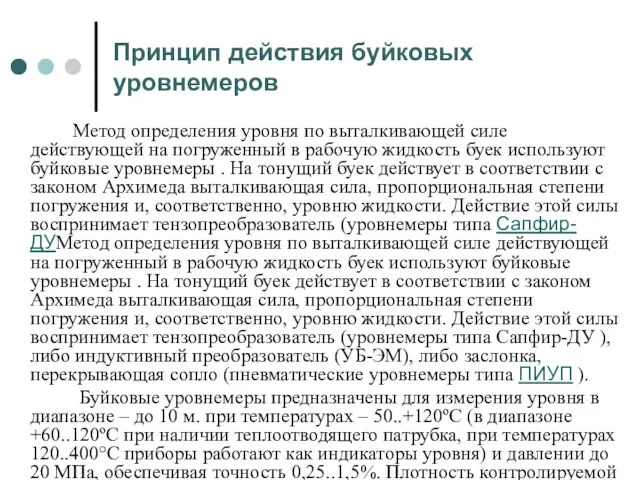
- 41. Принцип действия буйковых уровнемеров Метод определения уровня по выталкивающей силе действующей на погруженный в рабочую жидкость
- 42. Преобразователь уровня буйковый пневматический ПИУП
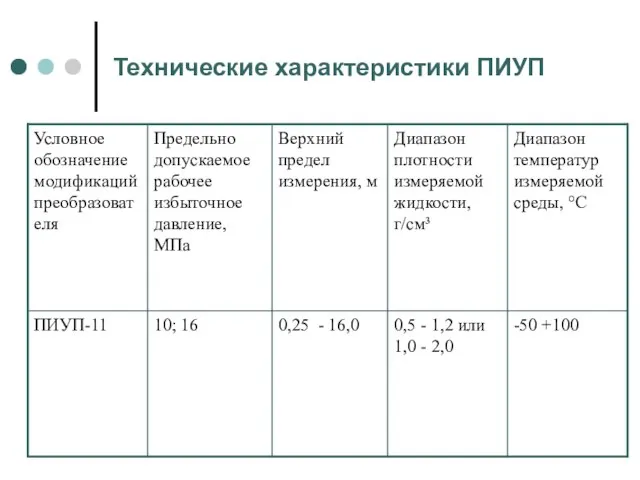
- 43. Технические характеристики ПИУП
- 44. Преобразователь уровня буйковый пневматический ПИУП Назначение: прибор предназначен для контроля уровня жидкости или уровня раздела двух
- 45. Гидростатический метод измерения уровня Гидростатический датчик давления Сапфир-22 ДГ
- 46. Гидростатические уровнемеры Гидростатические уровнемеры измеряют давление столба жидкости и преобразуют его в значение уровня, поскольку гидростатическое
- 47. Гидростатические уровнемеры Гидростатические уровнемеры применяются для однородных жидкостей в емкостях без существенного движения рабочей среды. Они
- 48. Интеллектуальные приборы Термин "интеллектуальные" для первичных устройств был введен для тех первичных устройств, внутри которых содержится
- 49. Контроллеры В настоящее время на рынке средств автоматизации представлено огромное количество различных программируемых логических контроллеров. Они
- 50. Контроллеры Контроллер (англ. controller - регулятор, управляющее устройство) — электрический прибор, с помощью которого в телемеханике
- 51. Контроллеры Контроллер MicroPC компании Octagon Systems Контроллер SIMATIC S7- 400 компании SIEMENS Контроллер SIMATIC S7- 300
- 52. Исполнительные механизмы Исполнительный механизм - сервопривод, устройство, предназначенное для перемещения регулирующего органа (регулирующий орган может быть
- 53. Классификация исполнительных механизмов И. м. обычно состоит из двигателя, передачи и элементов управления, а также элементов
- 54. Классификация исполнительных механизмов В гидравлических исполнительных механизмах перестановочное усилие создается за счет действия давления жидкости на
- 55. Классификация исполнительных механизмов Отдельный подкласс гидравлических И. м. составляют гидравлические И. м. с гидромуфтами. Мембранные и
- 56. Классификация исполнительных механизмов Электрические И.м. по принципу действия подразделяются на • электродвигательные • электромагнитные а по
- 57. Исполнительные механизмы (МЭО)
- 58. HART-протокол Обмен данными между системой управления и интеллектуальными первичными датчиками легко осуществляется с помощью стандартного коммуникационного
- 59. Архитектура HART Протокол HART может применяться в двух режимах подключения. Один представляет собой соединение «точка»-«точка», и
- 60. Метод передачи данных протокола HART
- 61. Команды HART-протокола Команды протокола подразделяются на три основные группы: Универсальные – основные команды, поддерживаемые ведомыми устройствами.
- 62. Команды HART-протокола 1. Универсальные Прочитать производителя и тип устройства Прочитать главную переменную (ГП), единицы измерения Прочитать
- 63. Команды HART-протокола 2. Стандартные Прочитать выборку из максимум четырех динамических переменных Записать константу времени выборки Записать
- 64. Сетевая технология Ethernet Сетевая технология – это согласованный набор стандартных протоколов и реализующих их программно-аппаратных средств
- 65. Команды HART-протокола 3. Специфические команды устройств Прочитать/записать уровень обрезки малых значений Пуск, останов или общий сброс
- 66. Преимущества Ethernet Главным преимуществом сетей Ethernet, благодаря которому они стали такими популярными, является их экономичность. Кроме
- 68. Скачать презентацию
Слайд 3Список литературы
6. Логачев В.Г., Разработка средств автоматического контроля размеров движущихся изделий с
Список литературы
6. Логачев В.Г., Разработка средств автоматического контроля размеров движущихся изделий с
Слайд 4Первичные преобразователи
Первичным преобразователем (ПП) перемещения называется устройство, воспринимающее контролируемое входное перемещение
Первичные преобразователи
Первичным преобразователем (ПП) перемещения называется устройство, воспринимающее контролируемое входное перемещение
Слайд 5Классификация первичных преобразователей
ПП могут классифицироваться по различным признакам, основными из которых являются:
Классификация первичных преобразователей
ПП могут классифицироваться по различным признакам, основными из которых являются:
Слайд 6Классификация первичных преобразователей
электромеханические:
электроконтактные (основанные на эффекте резкого изменения сопротивления парных электроконтактов
Классификация первичных преобразователей
электромеханические:
электроконтактные (основанные на эффекте резкого изменения сопротивления парных электроконтактов
Слайд 7Классификация измерений
Прямое измерение – измерение, при котором искомое значение величины получают непосредственно.
Классификация измерений
Прямое измерение – измерение, при котором искомое значение величины получают непосредственно.
Слайд 8Средства измерений
Средство измерений – это техническое средство (или комплекс технических средств), предназначенное
Средства измерений
Средство измерений – это техническое средство (или комплекс технических средств), предназначенное
Слайд 9Запорная арматура
Трубопроводная арматура предназначена для управления потоками нефти, транспортируемыми по трубопроводам. По
Запорная арматура
Трубопроводная арматура предназначена для управления потоками нефти, транспортируемыми по трубопроводам. По
Слайд 10Запорная арматура
Регуляторами давления называются устройства, служащие для автоматического поддержания давления на требуемом
Запорная арматура
Регуляторами давления называются устройства, служащие для автоматического поддержания давления на требуемом
Слайд 11Задвижки
Задвижки

Слайд 12Автоматизация производства
Автоматизация производства - процесс в развитии машинного производства, при котором
Автоматизация производства
Автоматизация производства - процесс в развитии машинного производства, при котором
Слайд 13Методы автоматизации производства
Во-первых, разрабатывают методы эффективного изучения закономерностей объектов управления, их динамики,
Методы автоматизации производства
Во-первых, разрабатывают методы эффективного изучения закономерностей объектов управления, их динамики,
Слайд 14Методы автоматизации производства
Во-вторых, определяют экономически целесообразные методы управления, тщательно обосновывают цель и
Методы автоматизации производства
Во-вторых, определяют экономически целесообразные методы управления, тщательно обосновывают цель и
Слайд 15Методы автоматизации производства
В-третьих, ставится задача создания инженерных методов наиболее простого, надёжного и
Методы автоматизации производства
В-третьих, ставится задача создания инженерных методов наиболее простого, надёжного и
Слайд 16Средства автоматизации
Технические средства автоматизации - приборы, устройства и технические системы, предназначенные для
Средства автоматизации
Технические средства автоматизации - приборы, устройства и технические системы, предназначенные для
Слайд 17Методы и приборы измерения температуры
Под температурой понимают степень нагретости вещества.
Физические свойства
Методы и приборы измерения температуры
Под температурой понимают степень нагретости вещества.
Физические свойства

Слайд 18Датчик температуры Метран - 274
Датчик температуры Метран - 274

Слайд 19Датчик температуры Метран - 274
Датчик состоит из электронного преобразователя с выходным
Датчик температуры Метран - 274
Датчик состоит из электронного преобразователя с выходным
Слайд 20Датчик температуры ТС 5008
Датчик температуры ТС 5008

Слайд 21Датчик температуры ТС 5008
Датчик предназначен для непрерывного преобразования температуры жидкостей и
Датчик температуры ТС 5008
Датчик предназначен для непрерывного преобразования температуры жидкостей и
Слайд 22Датчики температуры ТСМУ 0104, ТСПУ 0104
Датчики температуры ТСМУ 0104, ТСПУ 0104

Слайд 23Датчики температуры ТСМУ 0104, ТСПУ 0104
Термопреобразователи с унифицированным выходным сигналом ТСМУ
Датчики температуры ТСМУ 0104, ТСПУ 0104
Термопреобразователи с унифицированным выходным сигналом ТСМУ
Слайд 24Основные технические характеристики датчиков температуры ТС 5008, Метран-274, ТСМУ 0104 (ТСПУ 0104)
Основные технические характеристики датчиков температуры ТС 5008, Метран-274, ТСМУ 0104 (ТСПУ 0104)
Слайд 25Классификация приборов для измерения давления и разряжения
Все приборы для измерения давления
Классификация приборов для измерения давления и разряжения
Все приборы для измерения давления
Слайд 26Классификация приборов для измерения давления и разряжения
2.По принципу действия:
жидкостные —
Классификация приборов для измерения давления и разряжения
2.По принципу действия:
жидкостные —
Слайд 27Датчик давления Сапфир–22–ДИ–Ex
Датчик давления Сапфир–22–ДИ–Ex

Слайд 28Датчик давления Сапфир–22–ДИ–Ex
Измерительные преобразователи Сапфир–22–ДИ–Ex предназначены для работы в системах автоматического
Датчик давления Сапфир–22–ДИ–Ex
Измерительные преобразователи Сапфир–22–ДИ–Ex предназначены для работы в системах автоматического
Слайд 29Датчик давления Метран–43ДИ–Ех
Датчик давления Метран–43ДИ–Ех

Слайд 30Датчик давления Метран–43ДИ–Ех
Датчики этого типа предназначены для работы в системе автоматического
Датчик давления Метран–43ДИ–Ех
Датчики этого типа предназначены для работы в системе автоматического
Слайд 31Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД
Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД

Слайд 32Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД
Преобразователи разности давлений могут использоваться
Датчик измерения перепада давления САПФИР - 22-Ех-М-ДД
Преобразователи разности давлений могут использоваться
Слайд 33Основные технические характеристики датчиков давления Сапфир–22–ДИ–Ex, Метран–43ДИ–Ех, Сапфир - 22-Ех-М-ДД
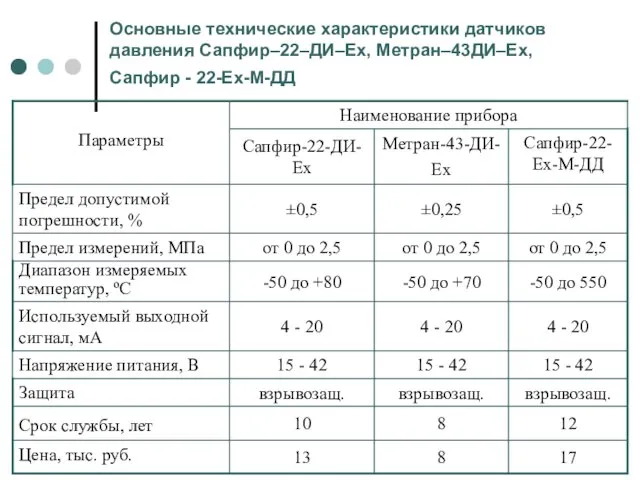
Основные технические характеристики датчиков давления Сапфир–22–ДИ–Ex, Метран–43ДИ–Ех, Сапфир - 22-Ех-М-ДД
Слайд 34Ультразвуковые уровнемеры
Ультразвуковой акустический уровнемер ЭХО-5
Ультразвуковые уровнемеры
Ультразвуковой акустический уровнемер ЭХО-5

Слайд 35Принцип действия ультразвуковых уровнемеров
Ультразвуковые бесконтактные уровнемеры осуществляют зондирование рабочей зоны волнами
Принцип действия ультразвуковых уровнемеров
Ультразвуковые бесконтактные уровнемеры осуществляют зондирование рабочей зоны волнами
Слайд 36Принцип действия ультразвуковых уровнемеров
Как правило, наиболее распространен вариант установки ультразвукового датчика
Принцип действия ультразвуковых уровнемеров
Как правило, наиболее распространен вариант установки ультразвукового датчика
Слайд 37Микроволновые радарные уровнемеры
Микроволновые радарные уровнемеры

Слайд 38Микроволновые радарные уровнемеры
Микроволновые радарные уровнемеры – наиболее сложные и высокотехнологичные средства
Микроволновые радарные уровнемеры
Микроволновые радарные уровнемеры – наиболее сложные и высокотехнологичные средства
Слайд 39Микроволновые радарные уровнемеры
Радарные уровнемеры - наиболее универсальные средства измерения уровня. Не
Микроволновые радарные уровнемеры
Радарные уровнемеры - наиболее универсальные средства измерения уровня. Не
Слайд 40Буйковый метод определения уровня
Буйковый уровнемер Сапфир-22 ДУ
Буйковый метод определения уровня
Буйковый уровнемер Сапфир-22 ДУ

Слайд 41Принцип действия буйковых уровнемеров
Метод определения уровня по выталкивающей силе действующей на
Принцип действия буйковых уровнемеров
Метод определения уровня по выталкивающей силе действующей на
Слайд 42Преобразователь уровня буйковый пневматический ПИУП
Преобразователь уровня буйковый пневматический ПИУП

Слайд 43Технические характеристики ПИУП
Технические характеристики ПИУП
Слайд 44Преобразователь уровня буйковый пневматический ПИУП
Назначение: прибор предназначен для контроля уровня жидкости
Преобразователь уровня буйковый пневматический ПИУП
Назначение: прибор предназначен для контроля уровня жидкости
Слайд 45Гидростатический метод измерения уровня
Гидростатический датчик давления Сапфир-22 ДГ
Гидростатический метод измерения уровня
Гидростатический датчик давления Сапфир-22 ДГ

Слайд 46Гидростатические уровнемеры
Гидростатические уровнемеры измеряют давление столба жидкости и преобразуют его в
Гидростатические уровнемеры
Гидростатические уровнемеры измеряют давление столба жидкости и преобразуют его в
Слайд 47Гидростатические уровнемеры
Гидростатические уровнемеры применяются для однородных жидкостей в емкостях без существенного
Гидростатические уровнемеры
Гидростатические уровнемеры применяются для однородных жидкостей в емкостях без существенного
Слайд 48Интеллектуальные приборы
Термин "интеллектуальные" для первичных устройств был введен для тех первичных
Интеллектуальные приборы
Термин "интеллектуальные" для первичных устройств был введен для тех первичных
Слайд 49Контроллеры
В настоящее время на рынке средств автоматизации представлено огромное количество различных
Контроллеры
В настоящее время на рынке средств автоматизации представлено огромное количество различных
Слайд 50Контроллеры
Контроллер (англ. controller - регулятор, управляющее устройство) — электрический прибор, с
Контроллеры
Контроллер (англ. controller - регулятор, управляющее устройство) — электрический прибор, с
Слайд 51Контроллеры
Контроллер MicroPC
компании Octagon Systems
Контроллер SIMATIC S7- 400
компании SIEMENS
Контроллер SIMATIC S7-
Контроллеры
Контроллер MicroPC
компании Octagon Systems
Контроллер SIMATIC S7- 400
компании SIEMENS
Контроллер SIMATIC S7-

Слайд 52Исполнительные механизмы
Исполнительный механизм - сервопривод, устройство, предназначенное для перемещения регулирующего органа
Исполнительные механизмы
Исполнительный механизм - сервопривод, устройство, предназначенное для перемещения регулирующего органа
Слайд 53Классификация исполнительных механизмов
И. м. обычно состоит из двигателя, передачи и элементов
Классификация исполнительных механизмов
И. м. обычно состоит из двигателя, передачи и элементов
Слайд 54Классификация исполнительных механизмов
В гидравлических исполнительных механизмах перестановочное усилие создается за счет
Классификация исполнительных механизмов
В гидравлических исполнительных механизмах перестановочное усилие создается за счет
Слайд 55Классификация исполнительных механизмов
Отдельный подкласс гидравлических И. м. составляют гидравлические И. м.
Классификация исполнительных механизмов
Отдельный подкласс гидравлических И. м. составляют гидравлические И. м.
Слайд 56Классификация исполнительных механизмов
Электрические И.м. по принципу действия подразделяются на
• электродвигательные
Классификация исполнительных механизмов
Электрические И.м. по принципу действия подразделяются на
• электродвигательные
Слайд 57Исполнительные механизмы (МЭО)
Исполнительные механизмы (МЭО)

Слайд 58
HART-протокол
Обмен данными между системой управления и интеллектуальными первичными датчиками легко осуществляется
HART-протокол
Обмен данными между системой управления и интеллектуальными первичными датчиками легко осуществляется
Слайд 59Архитектура HART
Протокол HART может применяться в двух режимах подключения.
Один представляет
Архитектура HART
Протокол HART может применяться в двух режимах подключения.
Один представляет
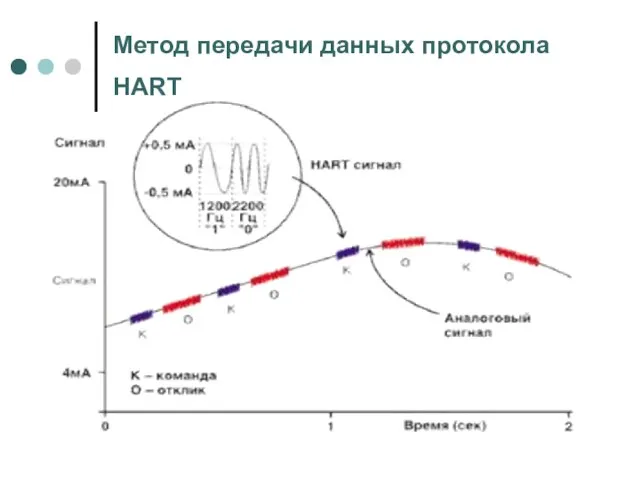
Слайд 60Метод передачи данных протокола HART
Метод передачи данных протокола HART
Слайд 61Команды HART-протокола
Команды протокола подразделяются на три основные группы:
Универсальные – основные
Команды HART-протокола
Команды протокола подразделяются на три основные группы:
Универсальные – основные
Слайд 62Команды HART-протокола
1. Универсальные
Прочитать производителя и тип устройства
Прочитать главную переменную (ГП),
Команды HART-протокола
1. Универсальные
Прочитать производителя и тип устройства
Прочитать главную переменную (ГП),
Слайд 63Команды HART-протокола
2. Стандартные
Прочитать выборку из максимум четырех динамических переменных
Записать константу
Команды HART-протокола
2. Стандартные
Прочитать выборку из максимум четырех динамических переменных
Записать константу
Слайд 64Сетевая технология Ethernet
Сетевая технология – это согласованный набор стандартных протоколов и
Сетевая технология Ethernet
Сетевая технология – это согласованный набор стандартных протоколов и
Слайд 65Команды HART-протокола
3. Специфические команды устройств
Прочитать/записать уровень обрезки малых значений
Команды HART-протокола
3. Специфические команды устройств
Прочитать/записать уровень обрезки малых значений
Слайд 66Преимущества Ethernet
Главным преимуществом сетей Ethernet, благодаря которому они стали такими популярными, является
Преимущества Ethernet
Главным преимуществом сетей Ethernet, благодаря которому они стали такими популярными, является
 Цветокоррекция
Цветокоррекция Способы аргументации
Способы аргументации Лабораторно-практическое занятие № 7. Уборка зерновых культур
Лабораторно-практическое занятие № 7. Уборка зерновых культур J0rES23bEluw4oWmLGWFeg
J0rES23bEluw4oWmLGWFeg Профессия – «Учитель»
Профессия – «Учитель» Ученый С.Королев
Ученый С.Королев Административные правоотношения
Административные правоотношения Восточные единоборства
Восточные единоборства Государственное учреждение образования «Средняя школа №15 г.Лиды»
Государственное учреждение образования «Средняя школа №15 г.Лиды» Лекция 5
Лекция 5 Питание и здоровье
Питание и здоровье Анализ учебно-методических материалов, поступивших в Методический координационный совет
Анализ учебно-методических материалов, поступивших в Методический координационный совет Обмен веществ
Обмен веществ Человеко-машинный интерфейсCP500
Человеко-машинный интерфейсCP500 Презентация на тему Ухо
Презентация на тему Ухо  Веселый хоровод
Веселый хоровод Степи. Растительность степи
Степи. Растительность степи Десятичные дроби. Десятичная запись дробных чисел
Десятичные дроби. Десятичная запись дробных чисел Нетипичные формы трудовой занятости
Нетипичные формы трудовой занятости Программы диагностики автомобиля
Программы диагностики автомобиля Научно-техническое сотрудничество с IT институтами - основа интеграции в международный рынок образования
Научно-техническое сотрудничество с IT институтами - основа интеграции в международный рынок образования Быт россиян в 18 веке
Быт россиян в 18 веке Основы материаловедения
Основы материаловедения Основы христианского супружества
Основы христианского супружества Требования к планам воспитательно-образовательной работы педагогов в ДОУ с детьми
Требования к планам воспитательно-образовательной работы педагогов в ДОУ с детьми Төрләндергеч кушымчалар
Төрләндергеч кушымчалар Презентация на тему Разложение многочлена на множители с помощью комбинации различных приемов 7 класс
Презентация на тему Разложение многочлена на множители с помощью комбинации различных приемов 7 класс  Dmitry Shteingart. Love
Dmitry Shteingart. Love