- Лекции по физике. Механика

Содержание
- 2. Механические колебания Колебаниями называются процессы, происходящие с некоторой долей повторяемости Классификация колебаний Свободные (собственные) Вынужденные Параметрические
- 3. Механические колебания Гармонические колебания описываются гармоническими функциями (sin, cos) Процессы в природе часто близки к гармоническим
- 5. Малые колебания Рассмотрим механическую систему с одной степенью свободы, имеющую минимум потенциальной энергии U(x) в точке
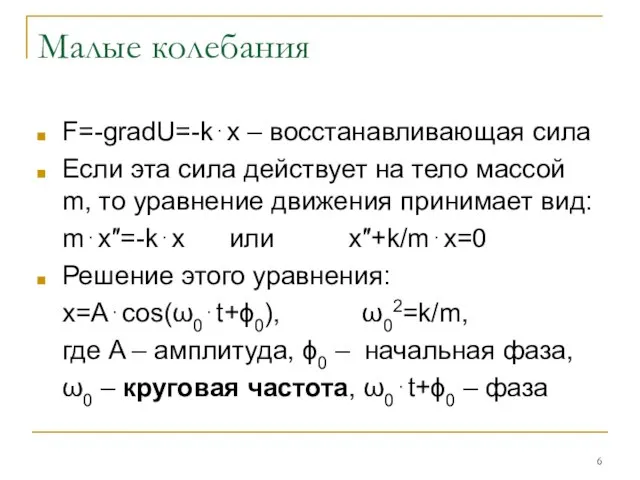
- 6. Малые колебания F=-gradU=-k⋅x – восстанавливающая сила Если эта сила действует на тело массой m, то уравнение
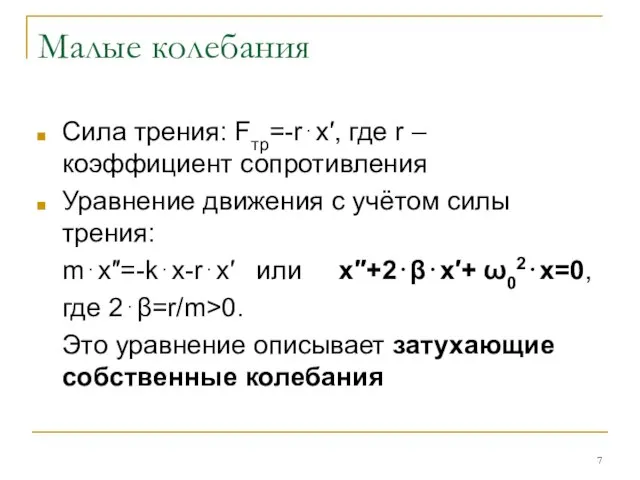
- 7. Малые колебания Сила трения: Fтр=-r⋅x′, где r – коэффициент сопротивления Уравнение движения с учётом силы трения:
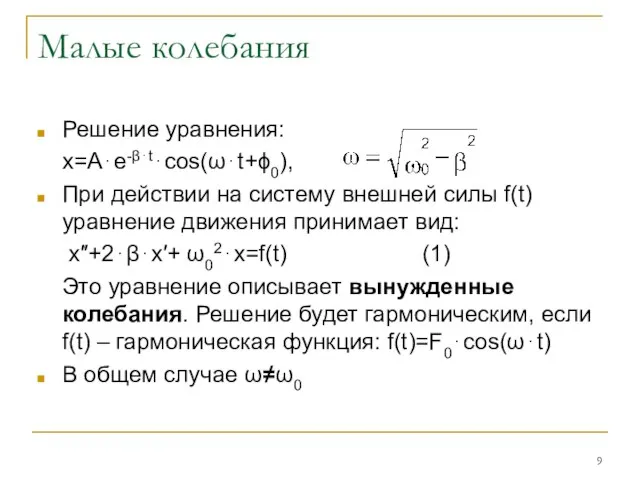
- 9. Малые колебания Решение уравнения: x=A⋅e-β⋅t⋅cos(ω⋅t+ϕ0), При действии на систему внешней силы f(t) уравнение движения принимает вид:
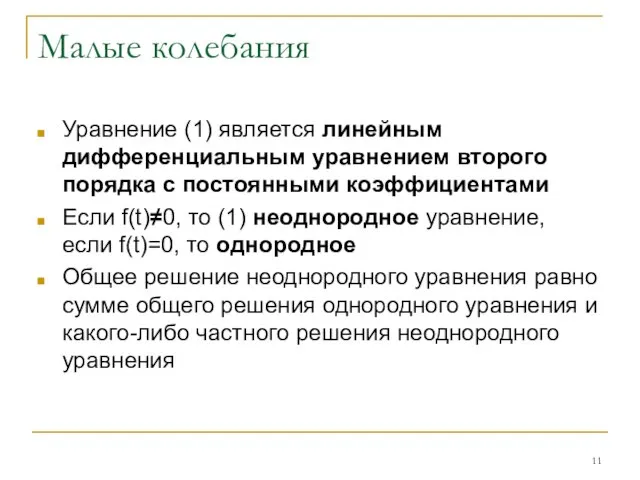
- 11. Малые колебания Уравнение (1) является линейным дифференциальным уравнением второго порядка с постоянными коэффициентами Если f(t)≠0, то
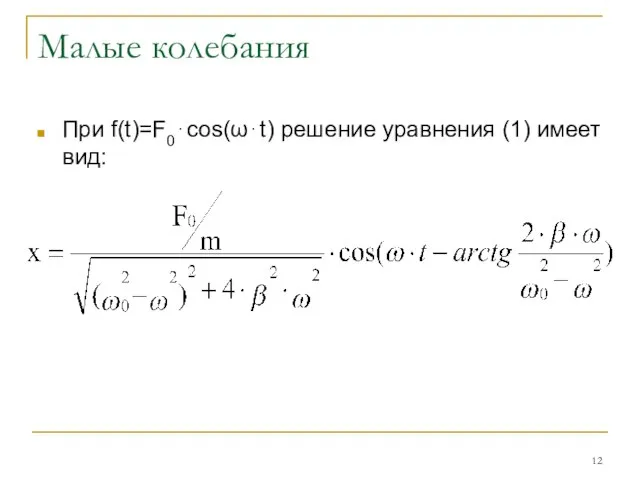
- 12. Малые колебания При f(t)=F0⋅cos(ω⋅t) решение уравнения (1) имеет вид:
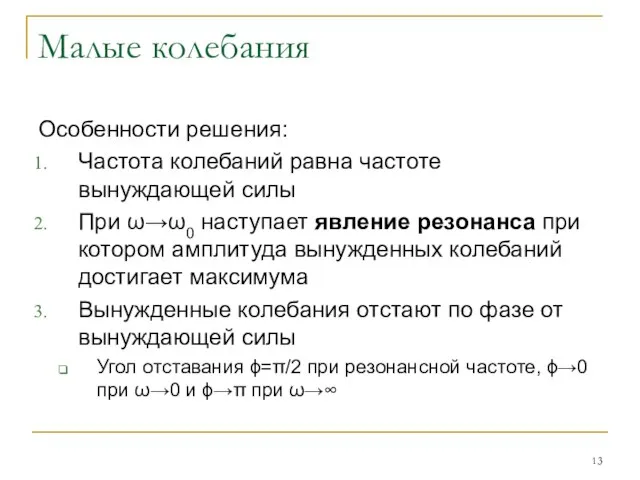
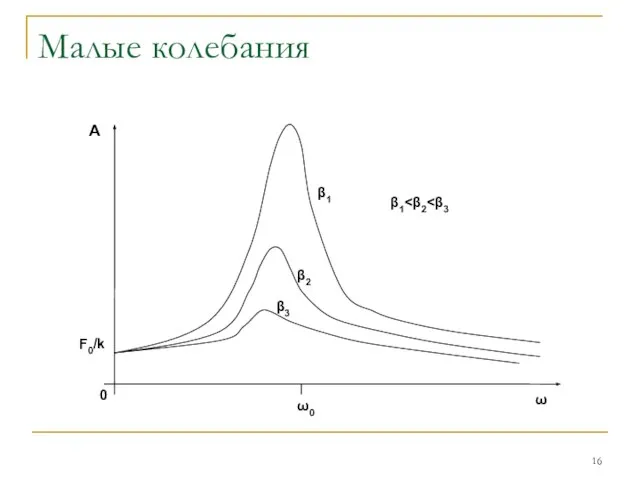
- 13. Малые колебания Особенности решения: Частота колебаний равна частоте вынуждающей силы При ω→ω0 наступает явление резонанса при
- 15. Явление резонанса
- 16. Малые колебания
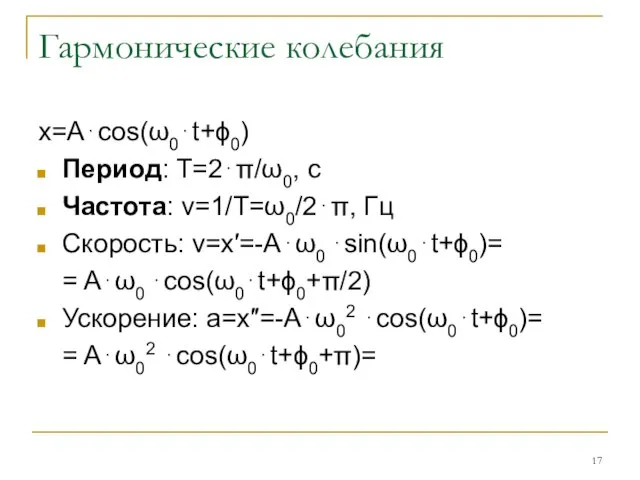
- 17. Гармонические колебания x=A⋅cos(ω0⋅t+ϕ0) Период: T=2⋅π/ω0, c Частота: ν=1/T=ω0/2⋅π, Гц Скорость: v=x′=-A⋅ω0 ⋅sin(ω0⋅t+ϕ0)= = A⋅ω0 ⋅cos(ω0⋅t+ϕ0+π/2) Ускорение:
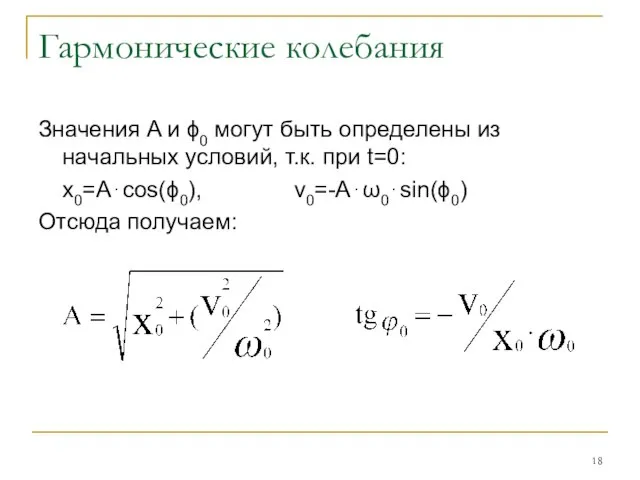
- 18. Гармонические колебания Значения A и ϕ0 могут быть определены из начальных условий, т.к. при t=0: x0=A⋅cos(ϕ0),
- 19. Гармонические колебания В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно. Кинетическая энергия достигает
- 20. Сложение колебаний Согласно теореме Фурье негармоническое колебание можно представить как бесконечную сумму гармонических колебаний с частотами
- 23. Пружинный маятник Возвращающая сила: Fн=k⋅Δl Уравнение движения: Δl″+(k/m)⋅Δl=0 Частота и период колебаний:
- 24. Математический маятник Положение системы задаётся углом отклонения. Уравнение движения: m⋅l2⋅ϕ″=-m⋅g⋅l⋅ϕ или ϕ″+(g/l)⋅ϕ=0 Частота и период колебаний:
- 25. Гармонические колебания Широкое применение на практике получили генераторы колебаний – устройства в которых возбуждаются и поддерживаются
- 27. Звуковые колебания Особую роль в жизни людей играют звуковые колебания которые представляют собой колебания частиц окружающей
- 33. Скачать презентацию
Слайд 2Механические колебания
Колебаниями называются процессы, происходящие с некоторой долей повторяемости
Классификация колебаний
Свободные (собственные)
Вынужденные
Параметрические
Автоколебания
Механические колебания
Колебаниями называются процессы, происходящие с некоторой долей повторяемости
Классификация колебаний
Свободные (собственные)
Вынужденные
Параметрические
Автоколебания
Слайд 3Механические колебания
Гармонические колебания описываются гармоническими функциями (sin, cos)
Процессы в природе часто близки
Механические колебания
Гармонические колебания описываются гармоническими функциями (sin, cos)
Процессы в природе часто близки
Слайд 5Малые колебания
Рассмотрим механическую систему с одной степенью свободы, имеющую минимум потенциальной энергии
Малые колебания
Рассмотрим механическую систему с одной степенью свободы, имеющую минимум потенциальной энергии
Слайд 6Малые колебания
F=-gradU=-k⋅x – восстанавливающая сила
Если эта сила действует на тело массой m,
Малые колебания
F=-gradU=-k⋅x – восстанавливающая сила
Если эта сила действует на тело массой m,
Слайд 7Малые колебания
Сила трения: Fтр=-r⋅x′, где r – коэффициент сопротивления
Уравнение движения с учётом
Малые колебания
Сила трения: Fтр=-r⋅x′, где r – коэффициент сопротивления
Уравнение движения с учётом
Слайд 9Малые колебания
Решение уравнения:
x=A⋅e-β⋅t⋅cos(ω⋅t+ϕ0),
При действии на систему внешней силы f(t) уравнение движения
Малые колебания
Решение уравнения:
x=A⋅e-β⋅t⋅cos(ω⋅t+ϕ0),
При действии на систему внешней силы f(t) уравнение движения
Слайд 11Малые колебания
Уравнение (1) является линейным дифференциальным уравнением второго порядка с постоянными коэффициентами
Если
Малые колебания
Уравнение (1) является линейным дифференциальным уравнением второго порядка с постоянными коэффициентами
Если
Слайд 12Малые колебания
При f(t)=F0⋅cos(ω⋅t) решение уравнения (1) имеет вид:
Малые колебания
При f(t)=F0⋅cos(ω⋅t) решение уравнения (1) имеет вид:
Слайд 13Малые колебания
Особенности решения:
Частота колебаний равна частоте вынуждающей силы
При ω→ω0 наступает явление резонанса
Малые колебания
Особенности решения:
Частота колебаний равна частоте вынуждающей силы
При ω→ω0 наступает явление резонанса
Слайд 15Явление резонанса
Явление резонанса

Слайд 16Малые колебания
Малые колебания
Слайд 17Гармонические колебания
x=A⋅cos(ω0⋅t+ϕ0)
Период: T=2⋅π/ω0, c
Частота: ν=1/T=ω0/2⋅π, Гц
Скорость: v=x′=-A⋅ω0 ⋅sin(ω0⋅t+ϕ0)=
= A⋅ω0 ⋅cos(ω0⋅t+ϕ0+π/2)
Ускорение: a=x″=-A⋅ω02 ⋅cos(ω0⋅t+ϕ0)=
=
Гармонические колебания
x=A⋅cos(ω0⋅t+ϕ0)
Период: T=2⋅π/ω0, c
Частота: ν=1/T=ω0/2⋅π, Гц
Скорость: v=x′=-A⋅ω0 ⋅sin(ω0⋅t+ϕ0)=
= A⋅ω0 ⋅cos(ω0⋅t+ϕ0+π/2)
Ускорение: a=x″=-A⋅ω02 ⋅cos(ω0⋅t+ϕ0)=
=
Слайд 18Гармонические колебания
Значения A и ϕ0 могут быть определены из начальных условий, т.к.
Гармонические колебания
Значения A и ϕ0 могут быть определены из начальных условий, т.к.
Слайд 19Гармонические колебания
В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно.
Гармонические колебания
В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно.
Слайд 20Сложение колебаний
Согласно теореме Фурье негармоническое колебание можно представить как бесконечную сумму гармонических
Сложение колебаний
Согласно теореме Фурье негармоническое колебание можно представить как бесконечную сумму гармонических

Слайд 23Пружинный маятник
Возвращающая сила:
Fн=k⋅Δl
Уравнение движения:
Δl″+(k/m)⋅Δl=0
Частота и период колебаний:
Пружинный маятник
Возвращающая сила:
Fн=k⋅Δl
Уравнение движения:
Δl″+(k/m)⋅Δl=0
Частота и период колебаний:
Слайд 24Математический маятник
Положение системы задаётся углом отклонения.
Уравнение движения:
m⋅l2⋅ϕ″=-m⋅g⋅l⋅ϕ или ϕ″+(g/l)⋅ϕ=0
Частота и период колебаний:
Математический маятник
Положение системы задаётся углом отклонения.
Уравнение движения:
m⋅l2⋅ϕ″=-m⋅g⋅l⋅ϕ или ϕ″+(g/l)⋅ϕ=0
Частота и период колебаний:
Слайд 25Гармонические колебания
Широкое применение на практике получили генераторы колебаний – устройства в которых
Гармонические колебания
Широкое применение на практике получили генераторы колебаний – устройства в которых
Слайд 27Звуковые колебания
Особую роль в жизни людей играют звуковые колебания которые представляют собой
Звуковые колебания
Особую роль в жизни людей играют звуковые колебания которые представляют собой



 Технологическое оборудование подготовки сырья
Технологическое оборудование подготовки сырья  Русский лес
Русский лес ГОТЫ И ЭМО – ДОРОГА В НИКУДА.
ГОТЫ И ЭМО – ДОРОГА В НИКУДА. СПИСОК ИСТОЧНИКОВ
СПИСОК ИСТОЧНИКОВ Май 2012
Май 2012 Основные компоненты содержания школьного образования по инфор-матике. Примерная программа курса информатики для 5-11классов.
Основные компоненты содержания школьного образования по инфор-матике. Примерная программа курса информатики для 5-11классов. Ответственность за преступления
Ответственность за преступления Групповой проект
Групповой проект Політична система суспільства та соціально-політичні механізми здійснення влади
Політична система суспільства та соціально-політичні механізми здійснення влади Гражданский бюджет города Сатпаев на 2012-2014 годы
Гражданский бюджет города Сатпаев на 2012-2014 годы Обеспечение доверия электронных государственных услуг на основе сервисов доверенной третьей стороны
Обеспечение доверия электронных государственных услуг на основе сервисов доверенной третьей стороны Математическая игра "Путешествие по станциям"
Математическая игра "Путешествие по станциям" Аттестация педагогических работников государственных и муниципальных образовательных учреждений с 1 января 2011г.
Аттестация педагогических работников государственных и муниципальных образовательных учреждений с 1 января 2011г. Ибн-Сина. Пути познания
Ибн-Сина. Пути познания Вышивание
Вышивание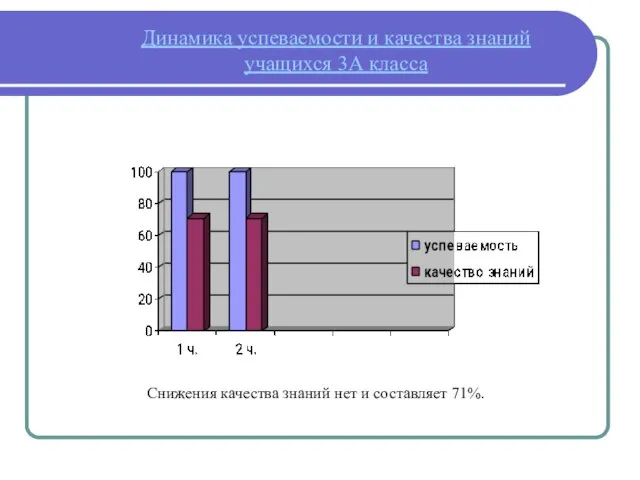 Динамика успеваемости и качества знаний учащихся
Динамика успеваемости и качества знаний учащихся Древний Киев (4 класс)
Древний Киев (4 класс) Программа обучения оператора участка измельчения руды. Теория процесса дробления руды
Программа обучения оператора участка измельчения руды. Теория процесса дробления руды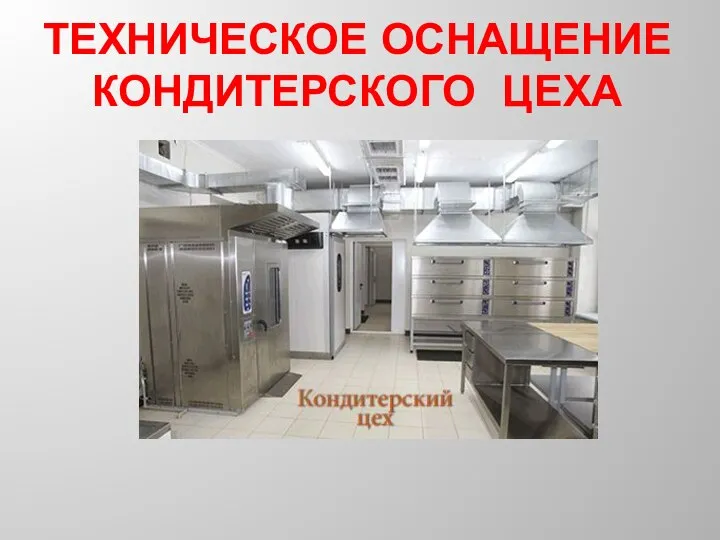 Техническое оснащение кондитерского цеха
Техническое оснащение кондитерского цеха Спасибо за мир!
Спасибо за мир! Презентация на тему Награды Великой Отечественной войны
Презентация на тему Награды Великой Отечественной войны Стандартизация, основные понятия и определения
Стандартизация, основные понятия и определения Mariana Trench
Mariana Trench Николай Федорович Ватутин
Николай Федорович Ватутин заповедники россии
заповедники россии Презентация на тему Русская архитектура в XVII веке
Презентация на тему Русская архитектура в XVII веке  Рисование в нетрадиционной технике
Рисование в нетрадиционной технике A real professional. What does it mean?
A real professional. What does it mean?