- Лекция по интеллектуальным информационным системам

Содержание
- 2. Введение Идея создания роботов далеко не нова. Само слово «робот» появилось в 20-х годах, как производное
- 3. Поколения роботов I поколение. Роботы с жесткой схемой управления. Практически все современные промышленные роботы принадлежат к
- 4. Первое поколение (станки ЧПУ) Станки с числовым программным управлением
- 5. Первое поколение Работающие промышленные роботы Fanuc модели R2000iB
- 6. Интеллектуальные роботы (третье поколение) Робот WowWee Робосапиенс Робот – учительница. Проводит школьные уроки
- 7. Четвертое поколение (Бастер) Относятся к фантастике
- 8. Структура интеллектуального робота Интеллектуальный робот = информационная система + подсистема восприятия + подсистема действия
- 9. Автономные робототехнические системы Робот Roomba (пылесос)
- 10. Автономные робототехнические системы Робот - газонокосилка
- 11. Автономные робототехнические системы Автономные роботы поддержки армии а) Разведчик б) Эвакуация с поля боя в) Платформа
- 12. Языки программирования роботов Языки первого уровня содержат команды, явно задающие необходимые движения робота. Языки второго уровня.
- 13. ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ Примеры возможных решений: голосовой интерфейс жестовый интерфейс специальные интерфейсные решения (перчатки, контакторы,
- 14. ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ Робот БЕРТИ (BERTI) в Лондонском музее наук
- 15. ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ Голосовое управление роботом университета Чень-Кунь (Тайвань) Специалисты государственного университета Чень-Кунь (Тайвань) объявили
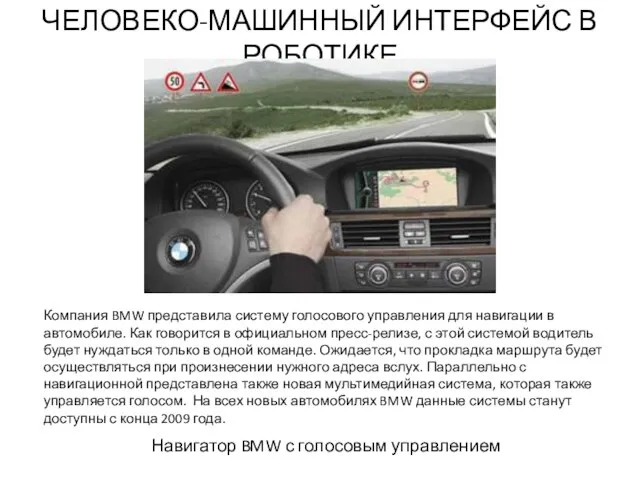
- 16. ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ Навигатор BMW с голосовым управлением Компания BMW представила систему голосового управления для
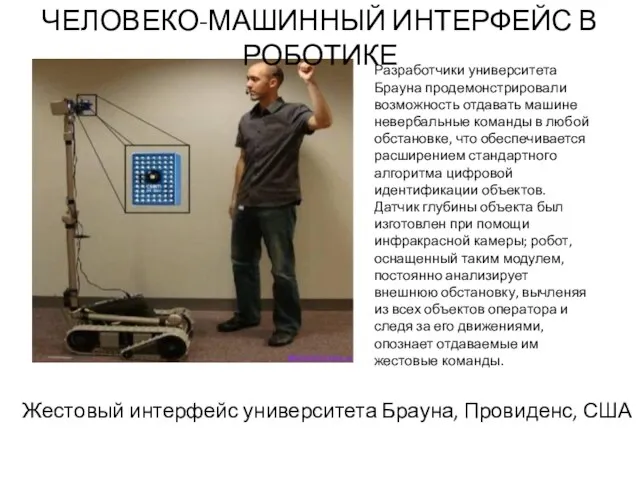
- 17. Жестовый интерфейс университета Брауна, Провиденс, США Разработчики университета Брауна продемонстрировали возможность отдавать машине невербальные команды в
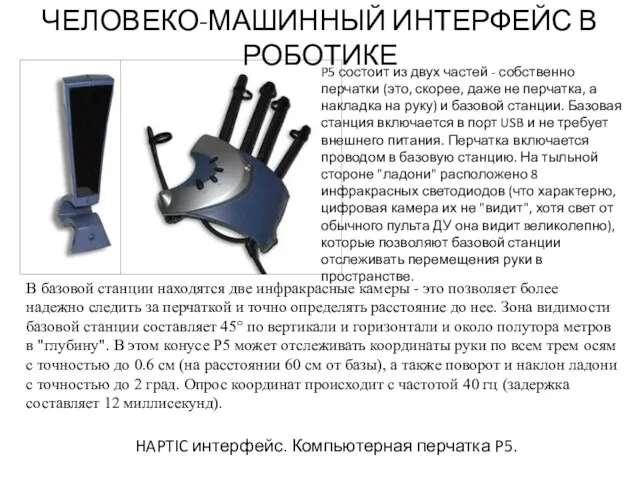
- 18. HAPTIC интерфейс. Компьютерная перчатка P5. ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ В базовой станции находятся две инфракрасные камеры
- 19. Заключение В настоящее время в мире изготавливается более 60 000 роботов в год. Фактически робототехника сегодня
- 21. Скачать презентацию
Слайд 3Поколения роботов
I поколение. Роботы с жесткой схемой управления. Практически все современные промышленные
Поколения роботов
I поколение. Роботы с жесткой схемой управления. Практически все современные промышленные
Слайд 4Первое поколение (станки ЧПУ)
Станки с числовым программным управлением
Первое поколение (станки ЧПУ)
Станки с числовым программным управлением

Слайд 5Первое поколение
Работающие промышленные роботы Fanuc модели R2000iB
Первое поколение
Работающие промышленные роботы Fanuc модели R2000iB

Слайд 6Интеллектуальные роботы (третье поколение)
Робот WowWee
Робосапиенс
Робот – учительница. Проводит школьные уроки
Интеллектуальные роботы (третье поколение)
Робот WowWee
Робосапиенс
Робот – учительница. Проводит школьные уроки
Слайд 7Четвертое поколение (Бастер)
Относятся к фантастике
Четвертое поколение (Бастер)
Относятся к фантастике

Слайд 8Структура интеллектуального робота
Интеллектуальный робот = информационная система + подсистема восприятия + подсистема
Структура интеллектуального робота
Интеллектуальный робот = информационная система + подсистема восприятия + подсистема

Слайд 9Автономные робототехнические системы
Робот Roomba (пылесос)
Автономные робототехнические системы
Робот Roomba (пылесос)

Слайд 10Автономные робототехнические системы
Робот - газонокосилка
Автономные робототехнические системы
Робот - газонокосилка

Слайд 11Автономные робототехнические системы
Автономные роботы поддержки армии
а) Разведчик
б) Эвакуация с поля боя
в)
Автономные робототехнические системы
Автономные роботы поддержки армии
а) Разведчик
б) Эвакуация с поля боя
в)

Слайд 12Языки программирования роботов
Языки первого уровня содержат команды, явно задающие необходимые движения робота.
Языки
Языки программирования роботов
Языки первого уровня содержат команды, явно задающие необходимые движения робота.
Языки
Слайд 13ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Примеры возможных решений:
голосовой интерфейс
жестовый интерфейс
специальные интерфейсные
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Примеры возможных решений:
голосовой интерфейс
жестовый интерфейс
специальные интерфейсные
Слайд 14ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Робот БЕРТИ (BERTI) в Лондонском музее наук
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Робот БЕРТИ (BERTI) в Лондонском музее наук

Слайд 15ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Голосовое управление роботом университета Чень-Кунь (Тайвань)
Специалисты государственного университета
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Голосовое управление роботом университета Чень-Кунь (Тайвань)
Специалисты государственного университета

Слайд 16ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Навигатор BMW с голосовым управлением
Компания BMW представила систему
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
Навигатор BMW с голосовым управлением
Компания BMW представила систему
Слайд 17 Жестовый интерфейс университета Брауна, Провиденс, США
Разработчики университета Брауна продемонстрировали возможность отдавать
Жестовый интерфейс университета Брауна, Провиденс, США
Разработчики университета Брауна продемонстрировали возможность отдавать
Слайд 18 HAPTIC интерфейс. Компьютерная перчатка P5.
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
В базовой станции находятся
HAPTIC интерфейс. Компьютерная перчатка P5.
ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС В РОБОТИКЕ
В базовой станции находятся
Слайд 19Заключение
В настоящее время в мире изготавливается более 60 000 роботов в год.
Заключение
В настоящее время в мире изготавливается более 60 000 роботов в год.
 Одри Тоту в рекламе Chanel 5
Одри Тоту в рекламе Chanel 5 Объект, предмет, функции и задачи истории психологии
Объект, предмет, функции и задачи истории психологии Обзор системы автоматизации переводаSDL Trados Studio 2009
Обзор системы автоматизации переводаSDL Trados Studio 2009 Межвузовская научно-практическая конференция 14 февраля 2009 г.
Межвузовская научно-практическая конференция 14 февраля 2009 г. Открытое ПО
Открытое ПО Подготовка к ГИА Тренировочные упражнения 9 класс
Подготовка к ГИА Тренировочные упражнения 9 класс Мировые катастрофы мостов. Ошибки проектирования
Мировые катастрофы мостов. Ошибки проектирования Деньги в каждый карман
Деньги в каждый карман Ноутбук
Ноутбук Структура Российского парламента
Структура Российского парламента Атаракс
Атаракс Про Инструменты: практики и события для подростков
Про Инструменты: практики и события для подростков Содержание и практика применения налога на добавленную стоимость
Содержание и практика применения налога на добавленную стоимость Путешествие от грядки к столу
Путешествие от грядки к столу Недопустимость вмешательства в деятельность судьи
Недопустимость вмешательства в деятельность судьи Багатоцільовий суперспектральний супутник надвисокої роздільної здатності WorldView-3
Багатоцільовий суперспектральний супутник надвисокої роздільної здатності WorldView-3 Малоэтажный жилой комплекс Черничная поляна – Ленинградская область, деревня Юкки. Застройщик – ООО АйЭмДэ групп
Малоэтажный жилой комплекс Черничная поляна – Ленинградская область, деревня Юкки. Застройщик – ООО АйЭмДэ групп Путешествие. Законы путешественников
Путешествие. Законы путешественников Новинка Новое поколение PSR 14,4 LI-2 & 18 LI-2
Новинка Новое поколение PSR 14,4 LI-2 & 18 LI-2 Жизненная ценность мёда
Жизненная ценность мёда files
files Discord_Bot_1
Discord_Bot_1 About time
About time Методы общественной экспертизы
Методы общественной экспертизы NM-Review Моделирование Прикладные вопросы Интернет-ресурсНаучно-популярный журналОбучение и консалтинг Математическое мод
NM-Review Моделирование Прикладные вопросы Интернет-ресурсНаучно-популярный журналОбучение и консалтинг Математическое мод Dr.Web для Windowsверсия 5.0 Коробочные продукты нового поколения
Dr.Web для Windowsверсия 5.0 Коробочные продукты нового поколения Вакансии ОКБ Экспериментально-машиностроительный завод имени В.М. Мясищева
Вакансии ОКБ Экспериментально-машиностроительный завод имени В.М. Мясищева Спортивная семья Шабановых
Спортивная семья Шабановых