- МЭМС - гироскопы

Содержание
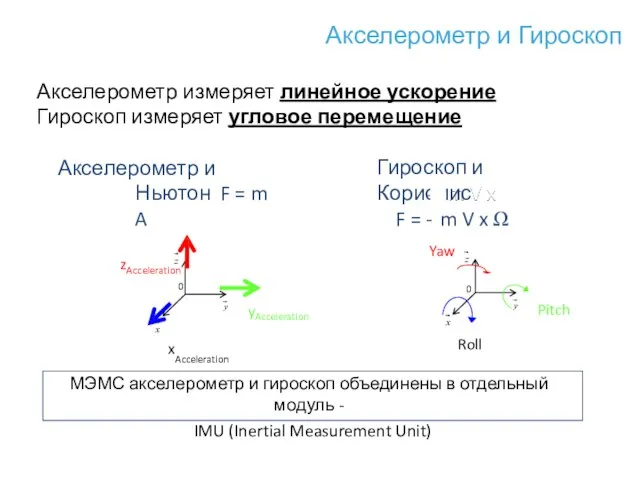
- 2. Акселерометр и Гироскоп Акселерометр и Ньютон F = m A Акселерометр измеряет линейное ускорение Гироскоп измеряет
- 3. Применение – Игровые консоли и смартфоны. – Стабилизация изображения в фото и видеокамерах. – Расширение GPS-решений
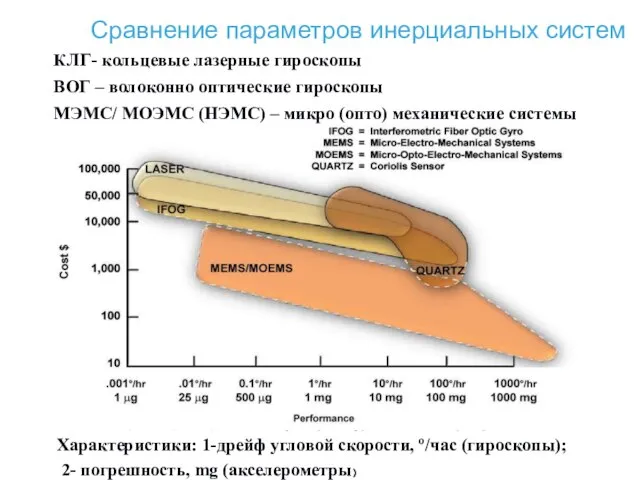
- 4. Сравнение параметров инерциальных систем КЛГ- кольцевые лазерные гироскопы ВОГ – волоконно оптические гироскопы МЭМС/ МОЭМС (НЭМС)
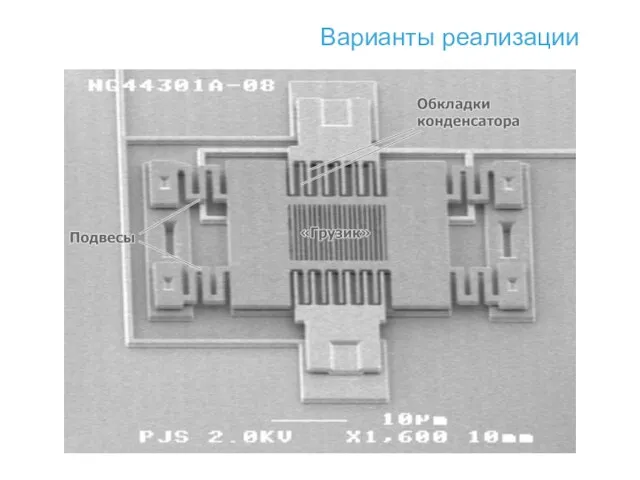
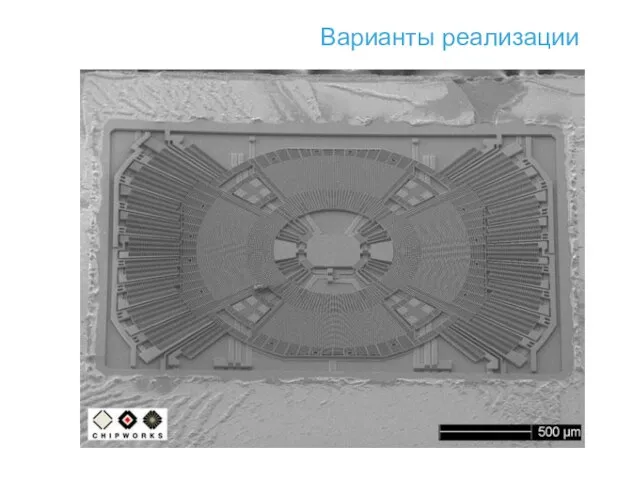
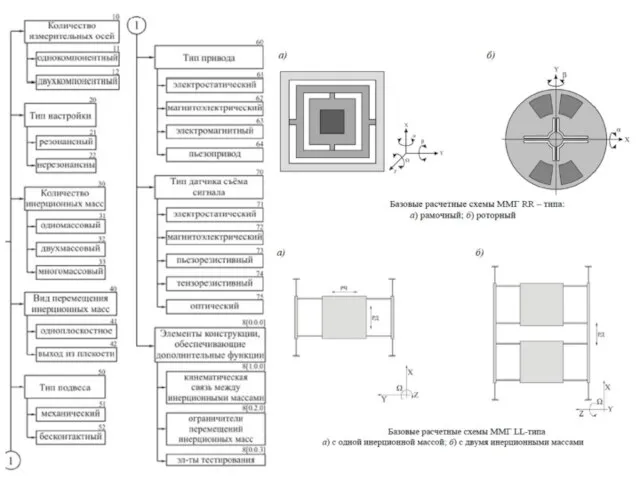
- 5. Варианты реализации
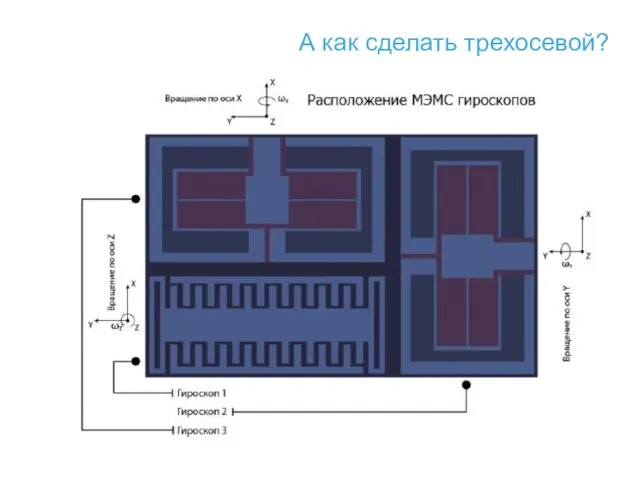
- 6. А как сделать трехосевой?
- 7. Варианты реализации
- 8. Внутренняя структура гироскопа Рыскание (Yaw) – вращение вокруг вертикальной оси (ось Z) Крен (Roll) – вращение
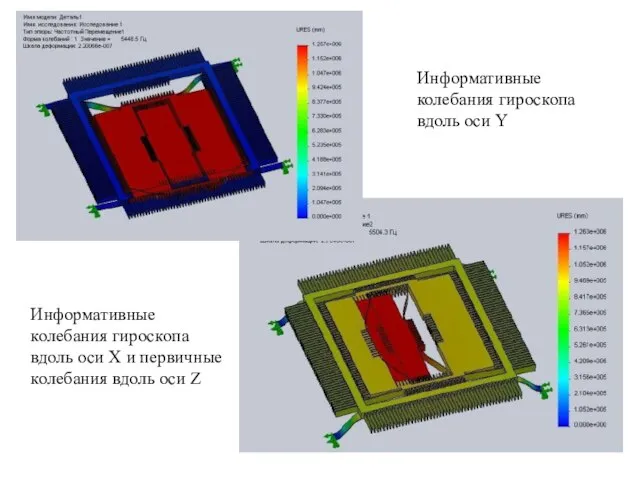
- 9. Информативные колебания гироскопа вдоль оси Y Информативные колебания гироскопа вдоль оси X и первичные колебания вдоль
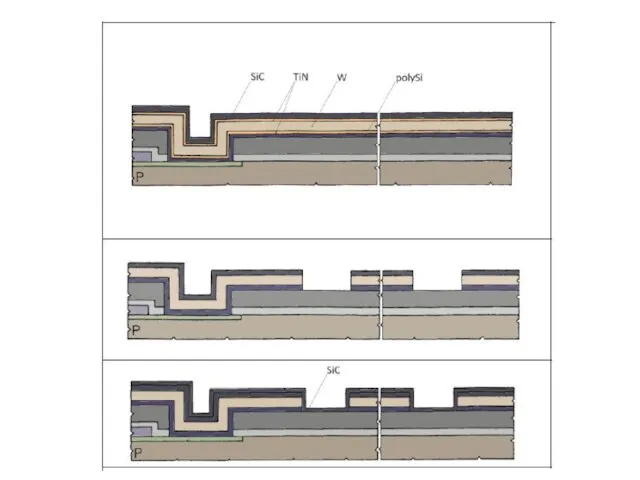
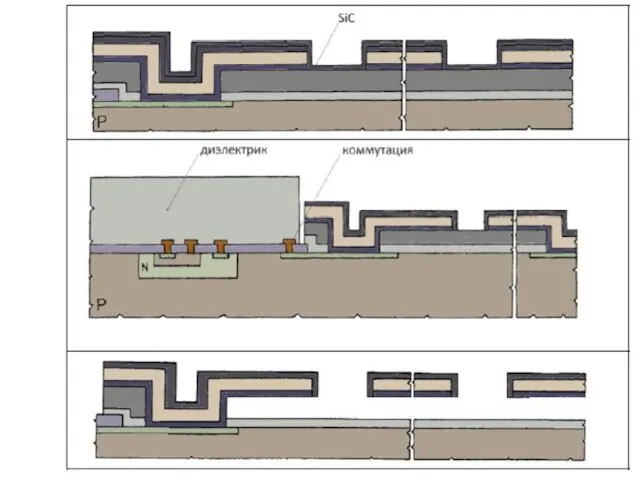
- 10. Как сделать гироскоп?
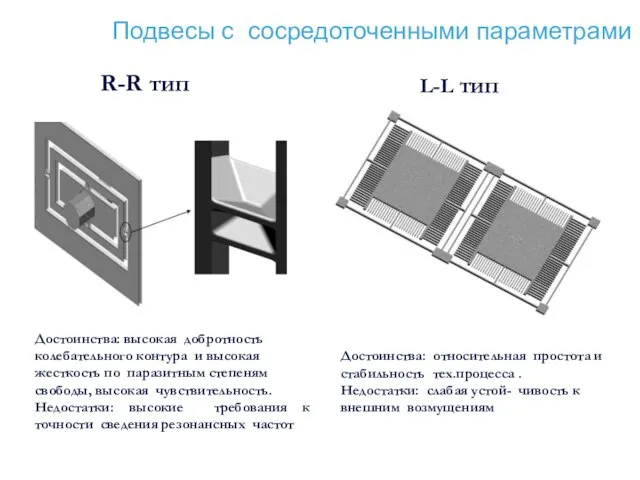
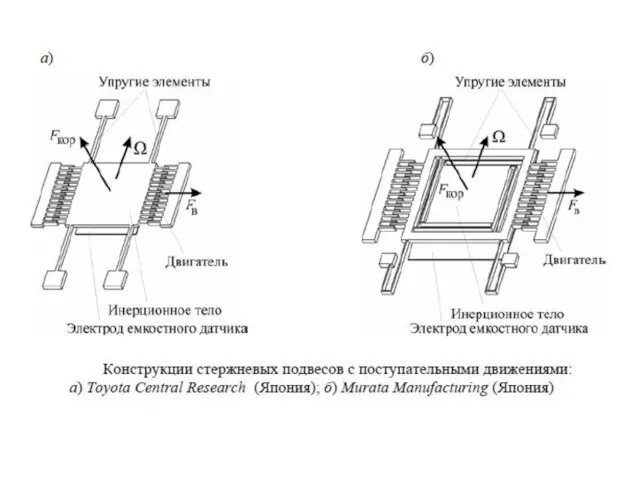
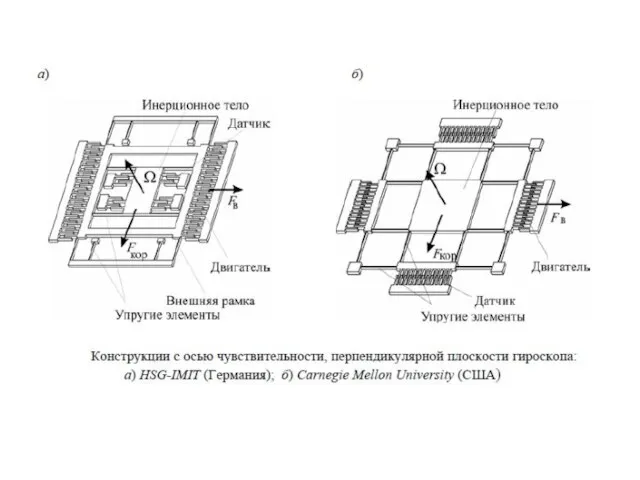
- 14. Подвесы с сосредоточенными параметрами Достоинства: высокая добротность колебательного контура и высокая жесткость по паразитным степеням свободы,
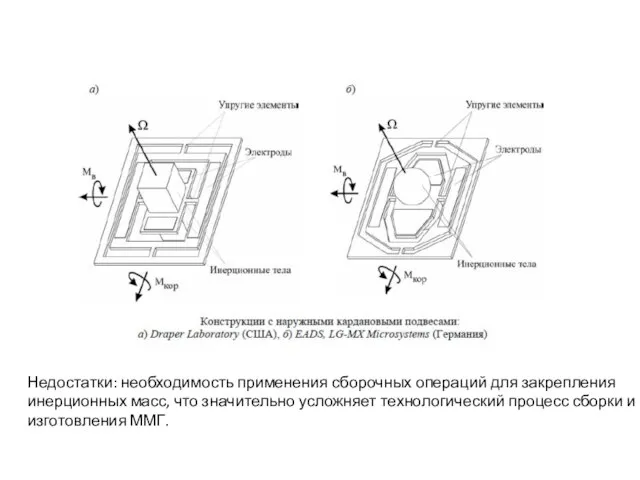
- 15. Недостатки: необходимость применения сборочных операций для закрепления инерционных масс, что значительно усложняет технологический процесс сборки и
- 21. Поняли как работает? Тут наверно нужно что-то запустить (к примеру видео)
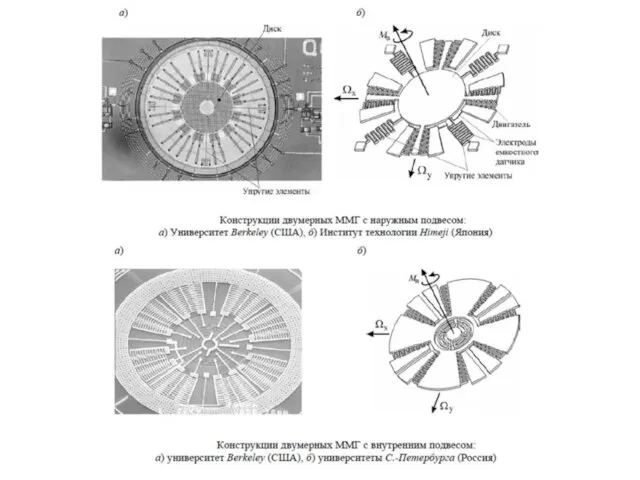
- 22. Подвесы с распределенными параметрами Достоинства: малая чувствительность к внешним возмущениям Недостатки: высокие требования к точности сведения
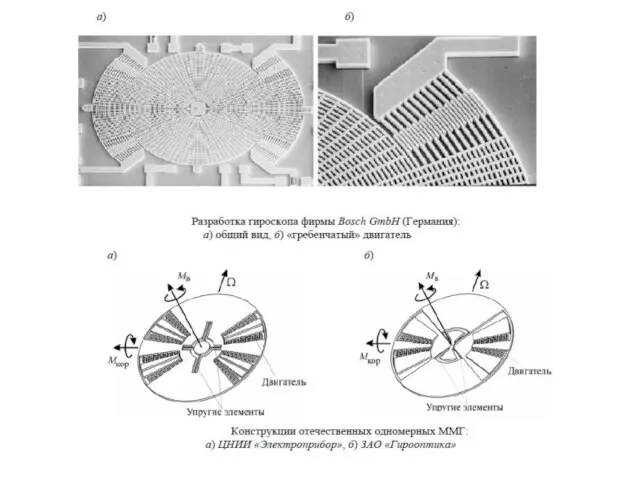
- 23. Конструкция камертонного планарного гироскопа: а) общий вид гироскопа, б) «гребенчатый» вибропривод
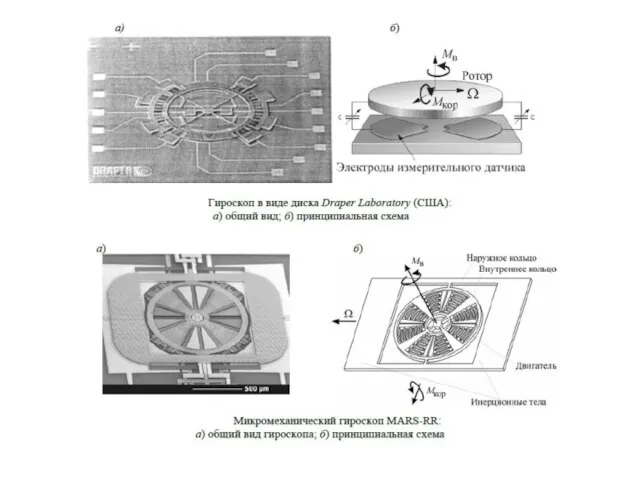
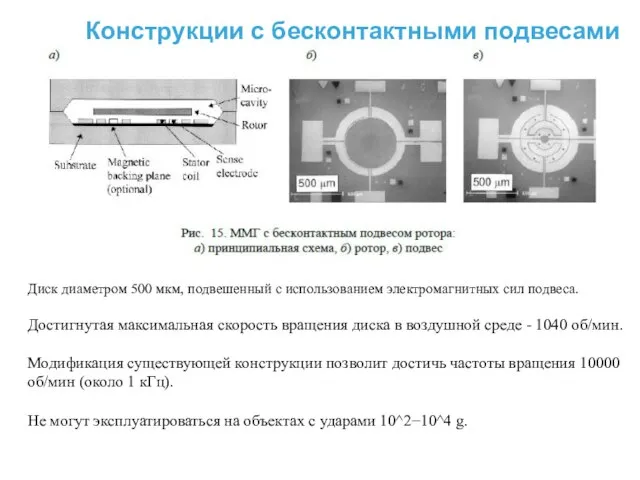
- 25. Конструкции с бесконтактными подвесами Диск диаметром 500 мкм, подвешенный с использованием электромагнитных сил подвеса. Достигнутая максимальная
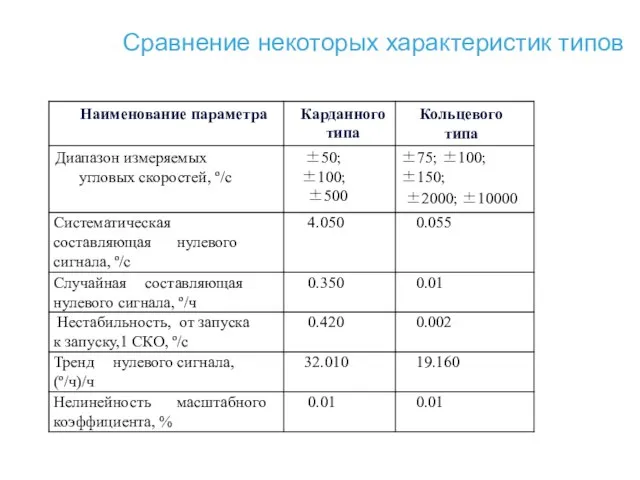
- 26. Сравнение некоторых характеристик типов Кольцевого типа
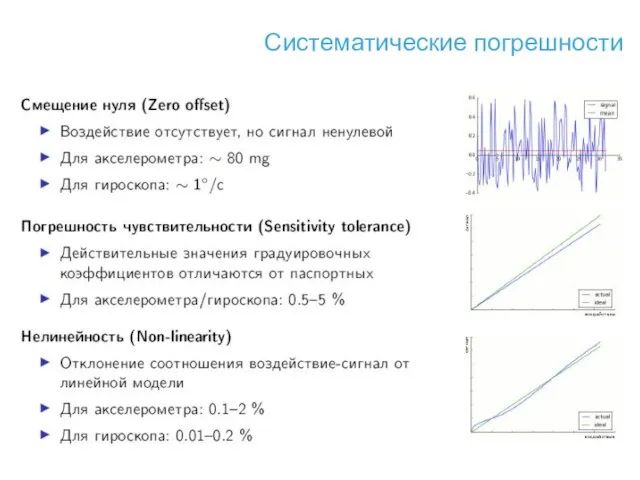
- 27. Систематические погрешности
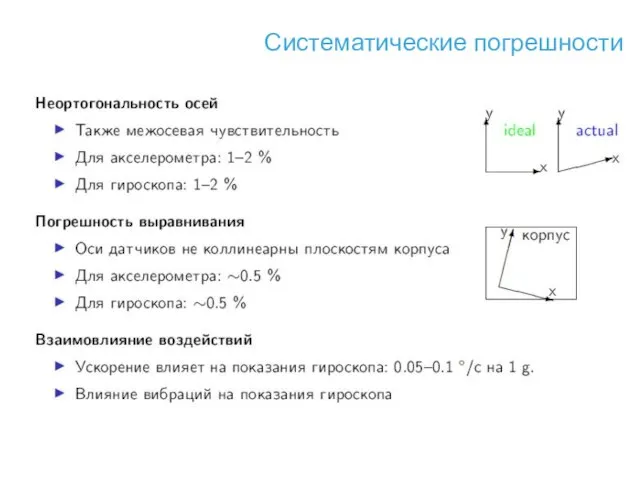
- 28. Систематические погрешности
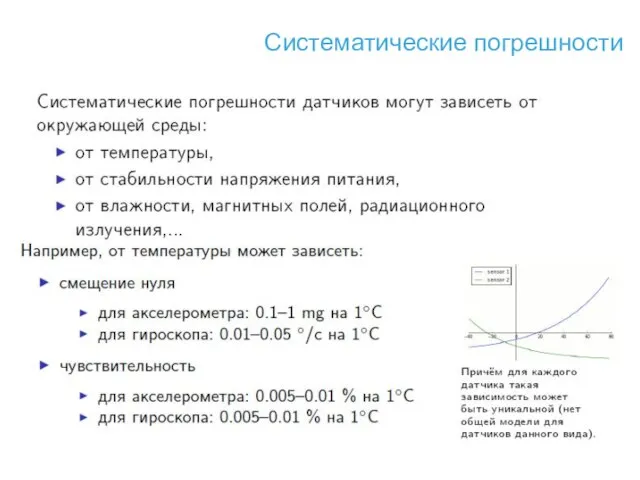
- 29. Систематические погрешности
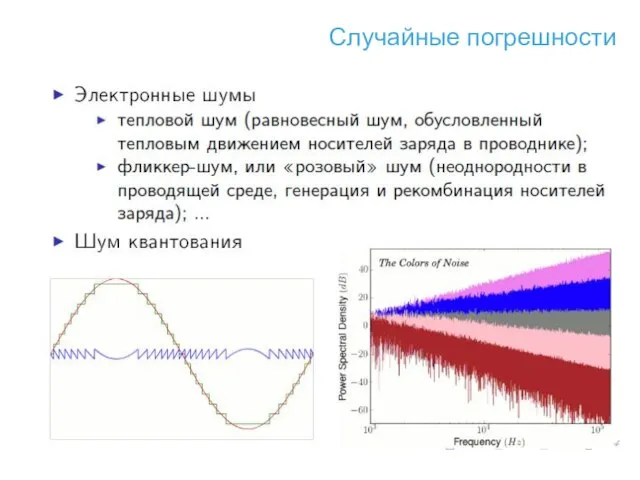
- 30. Случайные погрешности
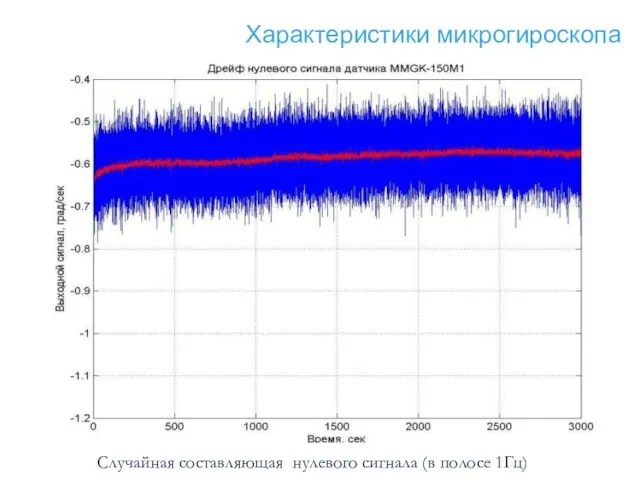
- 31. Характеристики микрогироскопа Случайная составляющая нулевого сигнала (в полосе 1Гц)
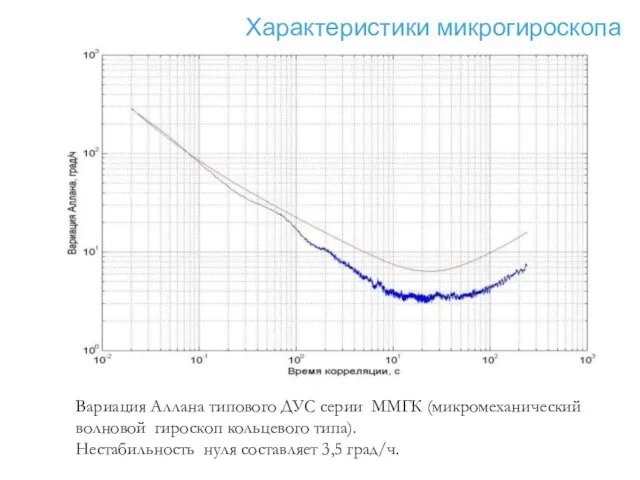
- 32. Вариация Аллана типового ДУС серии ММГК (микромеханический волновой гироскоп кольцевого типа). Нестабильность нуля составляет 3,5 град/ч.
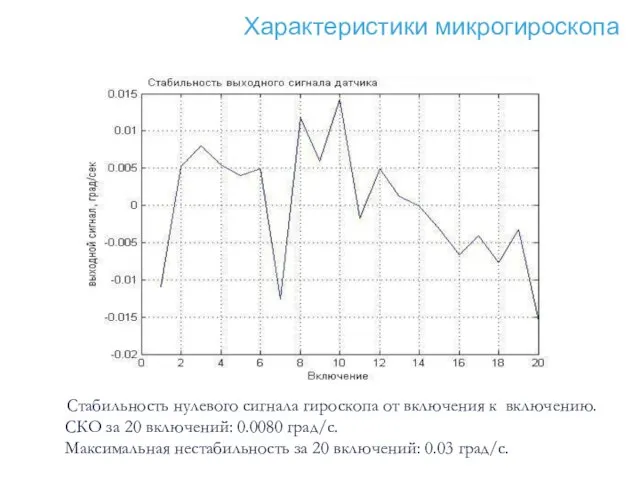
- 33. Характеристики микрогироскопа Стабильность нулевого сигнала гироскопа от включения к включению. СКО за 20 включений: 0.0080 град/c.
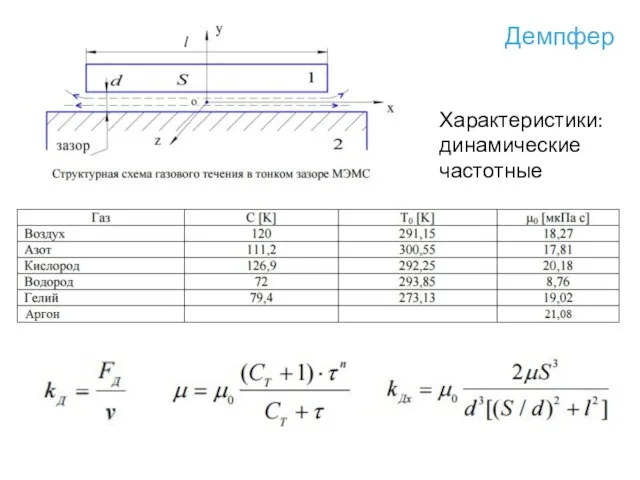
- 34. Демпфер Характеристики: динамические частотные
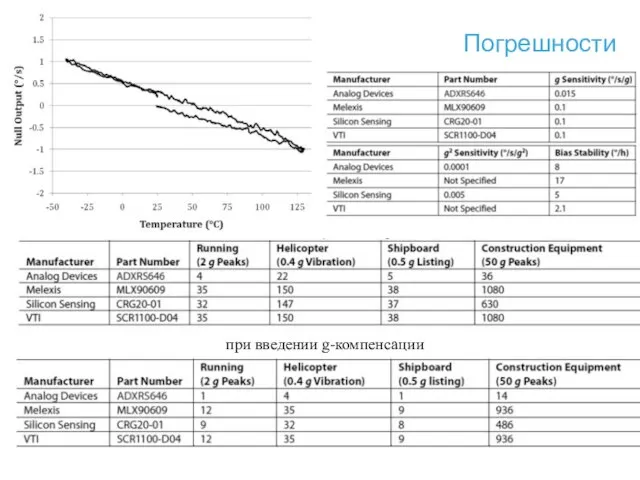
- 35. Погрешности при введении g-компенсации
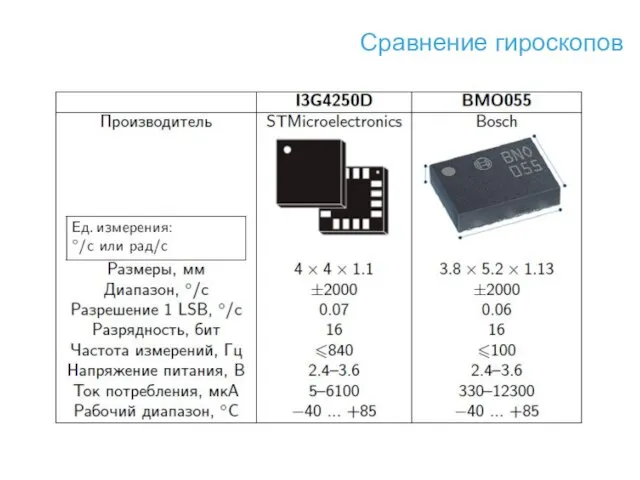
- 36. Сравнение гироскопов
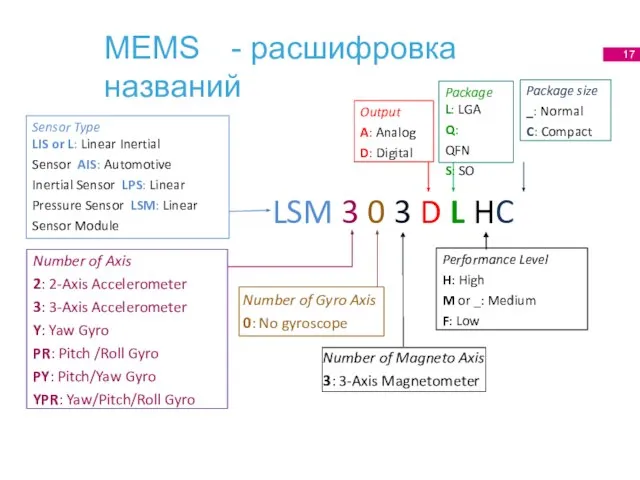
- 37. MEMS - расшифровка названий Sensor Type LIS or L: Linear Inertial Sensor AIS: Automotive Inertial Sensor
- 38. Гироскоп L3GD20 3-осевой цифровой гироскоп, цифровой SPI/I2C интерфейс Высокое разрешение, 16 бит разрешение Измерение вращения по
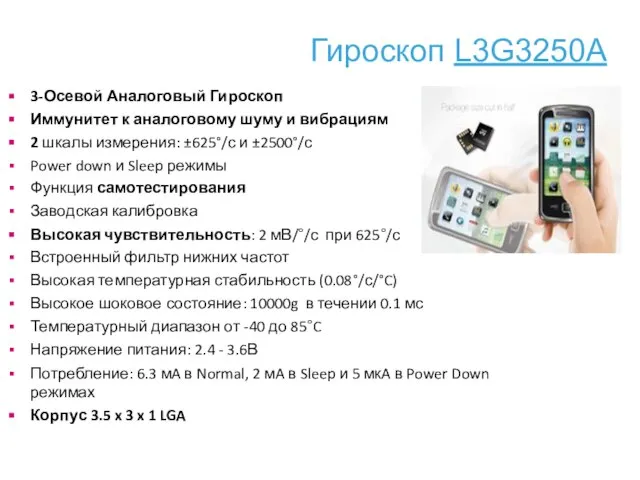
- 39. Гироскоп L3G3250A 3-Осевой Аналоговый Гироскоп Иммунитет к аналоговому шуму и вибрациям 2 шкалы измерения: ±625°/с и
- 40. A3G4250D: 3-осевой гироскоп для автомобильного рынка 42 A3G4250D Automotive – 3 axes – Gyroscope – 4x4
- 41. МЭМС IMU (iNEMO - Inertial Movement Unit)
- 42. МЭМС модуль – iNEMO Inertial Module LSM330D* MEMS IMU 54 LSM330D: МЭМС Акселерометр + Гироскоп 3-осевой
- 43. 9-осевой модуль iNEMO Маленький размер: 13 x 13 x 2 мм L3GD20: 3-осевой цифровой гироскоп LSM303DLHC:
- 44. Источники 1. habrahabr.ru Сравнение характеристик микромеханических гироскопов 2.Бабур Н ., Ш мидт Д ж. Направления развития
- 46. Скачать презентацию
Слайд 2Акселерометр и Гироскоп
Акселерометр и Ньютон F = m A
Акселерометр измеряет линейное ускорение
Гироскоп
Акселерометр и Гироскоп
Акселерометр и Ньютон F = m A
Акселерометр измеряет линейное ускорение
Гироскоп
Слайд 3Применение
– Игровые консоли и смартфоны.
– Стабилизация изображения в фото
и видеокамерах.
– Расширение GPS-решений (системы
Применение
– Игровые консоли и смартфоны.
– Стабилизация изображения в фото
и видеокамерах.
– Расширение GPS-решений (системы

Слайд 4Сравнение параметров инерциальных систем
КЛГ- кольцевые лазерные гироскопы
ВОГ – волоконно оптические гироскопы
МЭМС/ МОЭМС
Сравнение параметров инерциальных систем
КЛГ- кольцевые лазерные гироскопы
ВОГ – волоконно оптические гироскопы
МЭМС/ МОЭМС
Слайд 5Варианты реализации
Варианты реализации
Слайд 6А как сделать трехосевой?
А как сделать трехосевой?
Слайд 7Варианты реализации
Варианты реализации
Слайд 8Внутренняя структура гироскопа
Рыскание (Yaw) – вращение вокруг вертикальной оси
(ось Z)
Крен
Внутренняя структура гироскопа
Рыскание (Yaw) – вращение вокруг вертикальной оси
(ось Z)
Крен

Слайд 9Информативные колебания гироскопа вдоль оси Y
Информативные колебания гироскопа вдоль оси X
Информативные колебания гироскопа вдоль оси Y
Информативные колебания гироскопа вдоль оси X
Слайд 10Как сделать гироскоп?
Как сделать гироскоп?

Слайд 14Подвесы с сосредоточенными параметрами
Достоинства: высокая добротность колебательного контура и высокая жесткость по
Подвесы с сосредоточенными параметрами
Достоинства: высокая добротность колебательного контура и высокая жесткость по
Слайд 15Недостатки: необходимость применения сборочных операций для закрепления инерционных масс, что значительно усложняет
Недостатки: необходимость применения сборочных операций для закрепления инерционных масс, что значительно усложняет
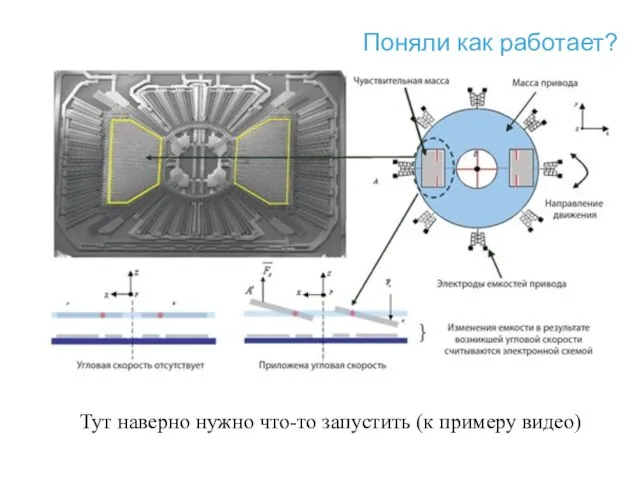
Слайд 21Поняли как работает?
Тут наверно нужно что-то запустить (к примеру видео)
Поняли как работает?
Тут наверно нужно что-то запустить (к примеру видео)
Слайд 22Подвесы с распределенными параметрами
Достоинства: малая чувствительность к внешним возмущениям
Недостатки: высокие
Подвесы с распределенными параметрами
Достоинства: малая чувствительность к внешним возмущениям
Недостатки: высокие

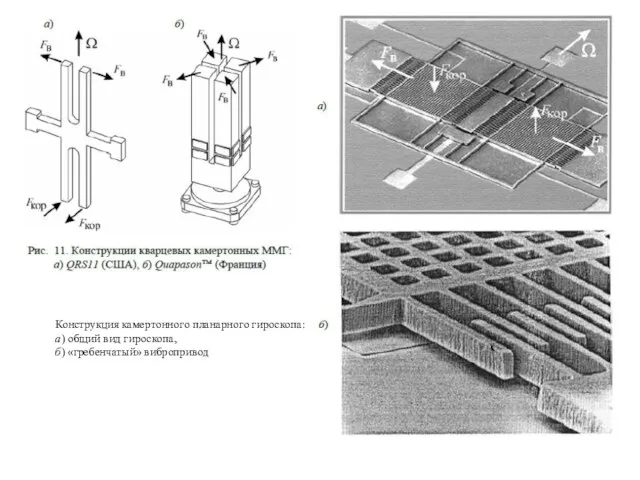
Слайд 23Конструкция камертонного планарного гироскопа:
а) общий вид гироскопа,
б) «гребенчатый» вибропривод
Конструкция камертонного планарного гироскопа:
а) общий вид гироскопа,
б) «гребенчатый» вибропривод
Слайд 25Конструкции с бесконтактными подвесами
Диск диаметром 500 мкм, подвешенный с использованием электромагнитных сил
Конструкции с бесконтактными подвесами
Диск диаметром 500 мкм, подвешенный с использованием электромагнитных сил
Слайд 26Сравнение некоторых характеристик типов
Кольцевого типа
Сравнение некоторых характеристик типов
Кольцевого типа
Слайд 27Систематические погрешности
Систематические погрешности
Слайд 28Систематические погрешности
Систематические погрешности
Слайд 29Систематические погрешности
Систематические погрешности
Слайд 30Случайные погрешности
Случайные погрешности
Слайд 31Характеристики микрогироскопа
Случайная составляющая нулевого сигнала (в полосе 1Гц)
Характеристики микрогироскопа
Случайная составляющая нулевого сигнала (в полосе 1Гц)
Слайд 32Вариация Аллана типового ДУС серии ММГК (микромеханический волновой гироскоп кольцевого типа).
Нестабильность нуля
Вариация Аллана типового ДУС серии ММГК (микромеханический волновой гироскоп кольцевого типа).
Нестабильность нуля
Слайд 33Характеристики микрогироскопа
Стабильность нулевого сигнала гироскопа от включения к включению.
СКО за 20
Характеристики микрогироскопа
Стабильность нулевого сигнала гироскопа от включения к включению.
СКО за 20
Слайд 34Демпфер
Характеристики:
динамические
частотные
Демпфер
Характеристики:
динамические
частотные
Слайд 35Погрешности
при введении g-компенсации
Погрешности
при введении g-компенсации
Слайд 36Сравнение гироскопов
Сравнение гироскопов
Слайд 37MEMS - расшифровка названий
Sensor Type
LIS or L: Linear Inertial Sensor AIS: Automotive Inertial
MEMS - расшифровка названий
Sensor Type
LIS or L: Linear Inertial Sensor AIS: Automotive Inertial
Слайд 38Гироскоп L3GD20
3-осевой цифровой гироскоп, цифровой SPI/I2C интерфейс
Высокое разрешение, 16 бит разрешение
Измерение вращения
Гироскоп L3GD20
3-осевой цифровой гироскоп, цифровой SPI/I2C интерфейс
Высокое разрешение, 16 бит разрешение
Измерение вращения

Слайд 39Гироскоп L3G3250A
3-Осевой Аналоговый Гироскоп
Иммунитет к аналоговому шуму и вибрациям
2 шкалы измерения: ±625°/с
Гироскоп L3G3250A
3-Осевой Аналоговый Гироскоп
Иммунитет к аналоговому шуму и вибрациям
2 шкалы измерения: ±625°/с
Слайд 40A3G4250D: 3-осевой гироскоп для
автомобильного рынка
42
A3G4250D
Automotive – 3 axes – Gyroscope – 4x4
A3G4250D: 3-осевой гироскоп для
автомобильного рынка
42
A3G4250D
Automotive – 3 axes – Gyroscope – 4x4

Слайд 41МЭМС IMU (iNEMO - Inertial
Movement Unit)
МЭМС IMU (iNEMO - Inertial
Movement Unit)
Слайд 42МЭМС модуль – iNEMO Inertial Module
LSM330D*
MEMS IMU
54
LSM330D:
МЭМС Акселерометр + Гироскоп
3-осевой акселерометр, ±2
МЭМС модуль – iNEMO Inertial Module
LSM330D*
MEMS IMU
54
LSM330D:
МЭМС Акселерометр + Гироскоп
3-осевой акселерометр, ±2

Слайд 439-осевой модуль iNEMO
Маленький размер: 13 x 13 x 2 мм
L3GD20: 3-осевой цифровой
9-осевой модуль iNEMO
Маленький размер: 13 x 13 x 2 мм
L3GD20: 3-осевой цифровой

Слайд 44Источники
1. habrahabr.ru Сравнение характеристик микромеханических гироскопов
2.Бабур Н ., Ш мидт Д ж.
Источники
1. habrahabr.ru Сравнение характеристик микромеханических гироскопов
2.Бабур Н ., Ш мидт Д ж.
 Г. Сутеев. Живые грибы
Г. Сутеев. Живые грибы Антидурь
Антидурь НОВАЯ ЭКОНОМИЧЕСКАЯ ГЕОГРАФИЯВ СТРУКТУРЕ ОБРАЗОВАТЕЛЬНОЙ ПРОГРАММЫ СПБФ НИУ ВШЭ
НОВАЯ ЭКОНОМИЧЕСКАЯ ГЕОГРАФИЯВ СТРУКТУРЕ ОБРАЗОВАТЕЛЬНОЙ ПРОГРАММЫ СПБФ НИУ ВШЭ Боевые искусства Древней Руси
Боевые искусства Древней Руси Презентация на тему Курс: ЭКОЛОГИЯ
Презентация на тему Курс: ЭКОЛОГИЯ  Отказы в продажах
Отказы в продажах Домашнее задание для участия в интервью “Город моей мечты”. Шаблон
Домашнее задание для участия в интервью “Город моей мечты”. Шаблон Как узнать аккредитована лаборатория или нет
Как узнать аккредитована лаборатория или нет Город Пущино
Город Пущино Казахстанский Национальный Педагогический Университет
Казахстанский Национальный Педагогический Университет  British and Russian food and drinks
British and Russian food and drinks Профессиональные сообщества как инструмент управления знаниями
Профессиональные сообщества как инструмент управления знаниями Организация проверки пунктов проведения экзаменов общественными наблюдателями в период проведения единого государственного э
Организация проверки пунктов проведения экзаменов общественными наблюдателями в период проведения единого государственного э Российский рынок природного газа и перспективы его либерализации
Российский рынок природного газа и перспективы его либерализации Учись играя и играй учась!
Учись играя и играй учась! Дело ЮКОСа
Дело ЮКОСа маловідомих місць Західно Украни
маловідомих місць Західно Украни Какие модели со-управления… ?
Какие модели со-управления… ? Оптимизация бизнес-процессов оформления отгрузки товаров на примере торгово-промышленного холдинга
Оптимизация бизнес-процессов оформления отгрузки товаров на примере торгово-промышленного холдинга О методах тренировки мышц кистей и предплечий в гиревом спорте
О методах тренировки мышц кистей и предплечий в гиревом спорте Взаимосвязь функций управления и процесса принятия управленческого решения
Взаимосвязь функций управления и процесса принятия управленческого решения Тема: Педагогические условия эффективного развития социальных компетенций подростков»
Тема: Педагогические условия эффективного развития социальных компетенций подростков» Разработка проектной документации в области охраны окружающей среды при проектировании и строительстве объектов
Разработка проектной документации в области охраны окружающей среды при проектировании и строительстве объектов Батьківські збори (звіт)
Батьківські збори (звіт) Здоровье - главная жизненная ценность
Здоровье - главная жизненная ценность Типы кристаллических решеток
Типы кристаллических решеток Музей Шерлока Холмса (Sherlock Holmes museum)
Музей Шерлока Холмса (Sherlock Holmes museum) About myself and all over the world
About myself and all over the world