- Международная стандартизация телекоммуникаций. Язык спецификаций и описаний SDL. Язык MSC. Лекция 3

Содержание
- 2. Основная литература Л1. Гольдштейн Б.С. Системы коммутации. Учебник для ВУЗов. 2-е издание, доп. и испр.//СПб.: BHV-2004.
- 3. Изложение этого материала в: [Л1]. Параграф 1.7 [Л2]. Параграф 2.3
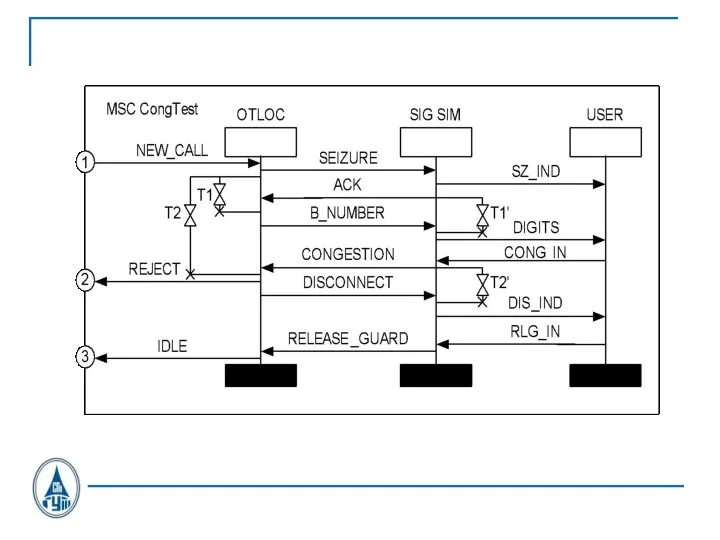
- 4. Язык описаний и спецификаций SDL. Язык MSC (Message Sequence Chart). Язык TTCN (Tree and Tabular Combined
- 6. Элементы теории спецификаций ПО Различные способы задания языков спецификаций: Грамматики Конечные автоматы Спецификация должна быть конечным
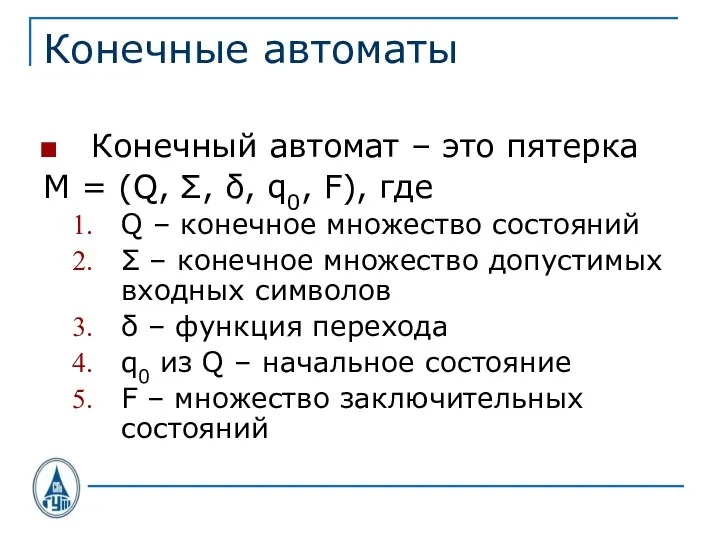
- 7. Конечные автоматы Конечный автомат – это пятерка M = (Q, Σ, δ, q0, F), где Q
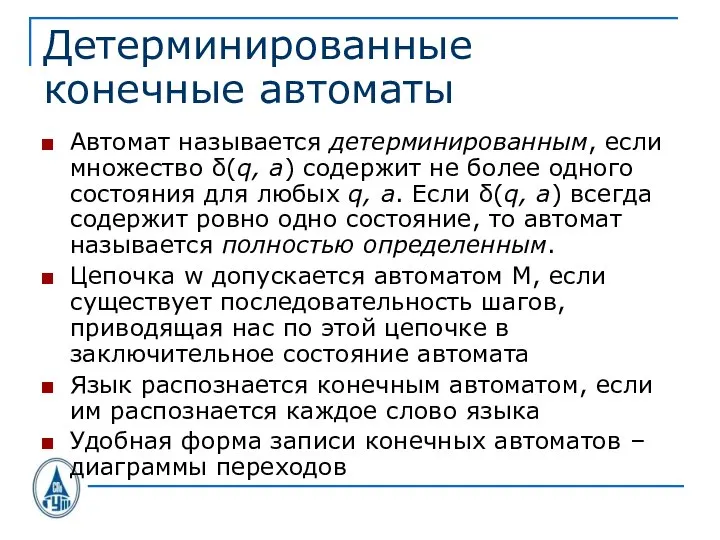
- 8. Детерминированные конечные автоматы Автомат называется детерминированным, если множество δ(q, a) содержит не более одного состояния для
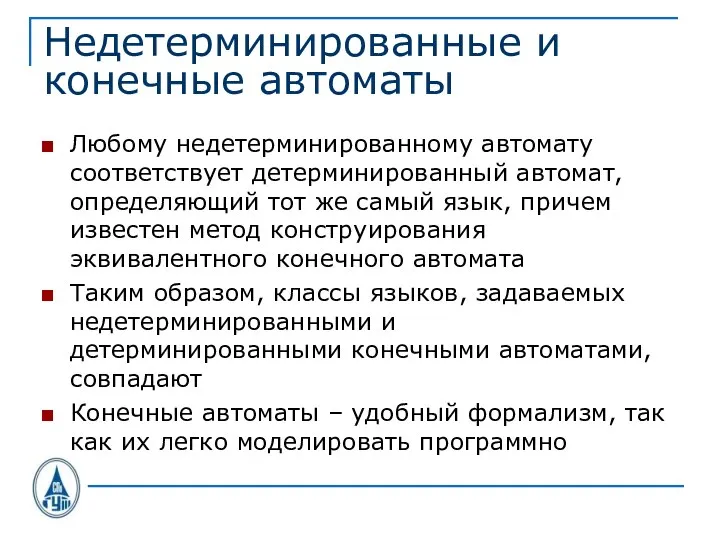
- 9. Недетерминированные и конечные автоматы Любому недетерминированному автомату соответствует детерминированный автомат, определяющий тот же самый язык, причем
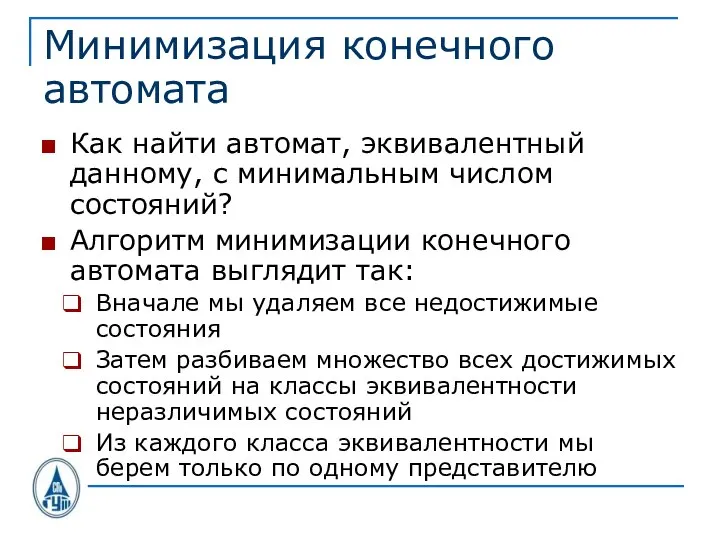
- 10. Минимизация конечного автомата Как найти автомат, эквивалентный данному, с минимальным числом состояний? Алгоритм минимизации конечного автомата
- 11. План: SDL-система SDL-блок SDL-процесс Синтаксис и семантика языка SDL Примеры
- 26. SDL состояния INPUT OUTPUT SDL-диаграмма
- 32. Изложение этого материала в: [Л1]. Параграф 9.4. [Л2]. Параграф 2.1, 2.2 и 2.3
- 33. Блок обработки исходящего вызова OTLOC CAS U.21
- 34. Сигналы С1.1, передаваемые в сторону линейного тракта от процесса OTLOC при исходящем соединении по СЛ, ЗСЛ
- 35. Сигналы С1.2, принимаемые в OTLOC со стороны линейного тракта при исходящем соединении по СЛ, ЗСЛ
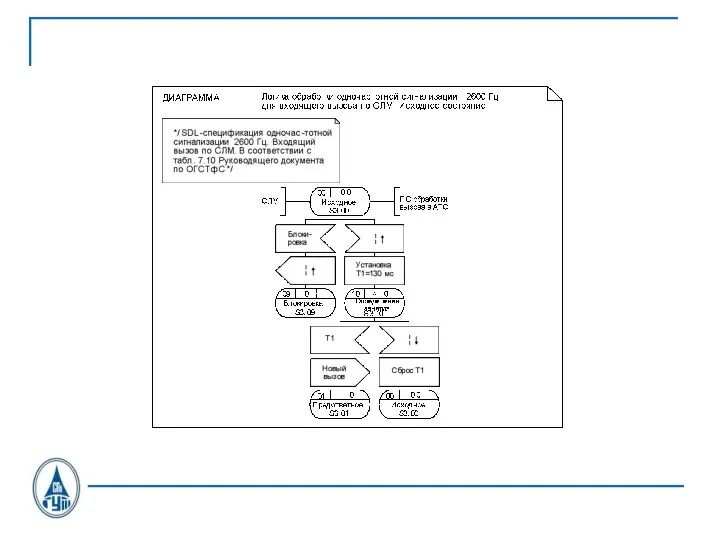
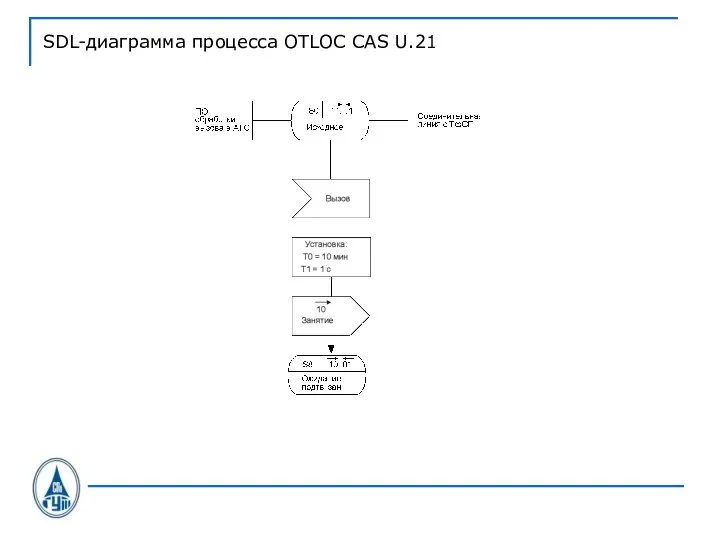
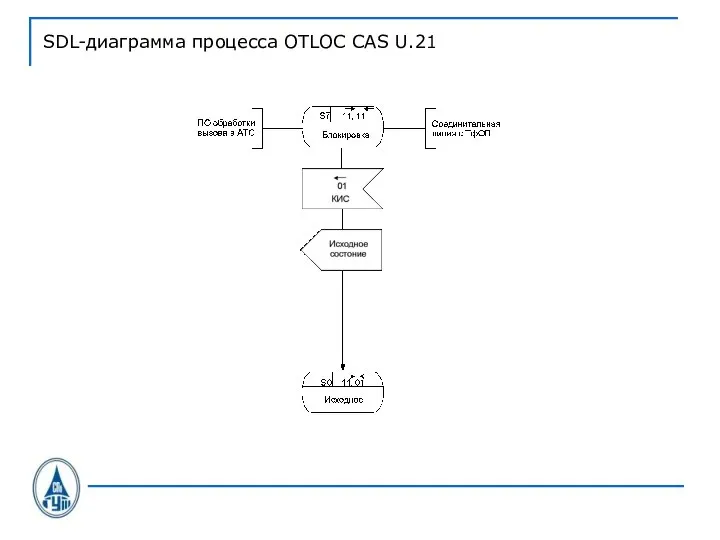
- 36. SDL-диаграмма процесса OTLOC CAS U.21
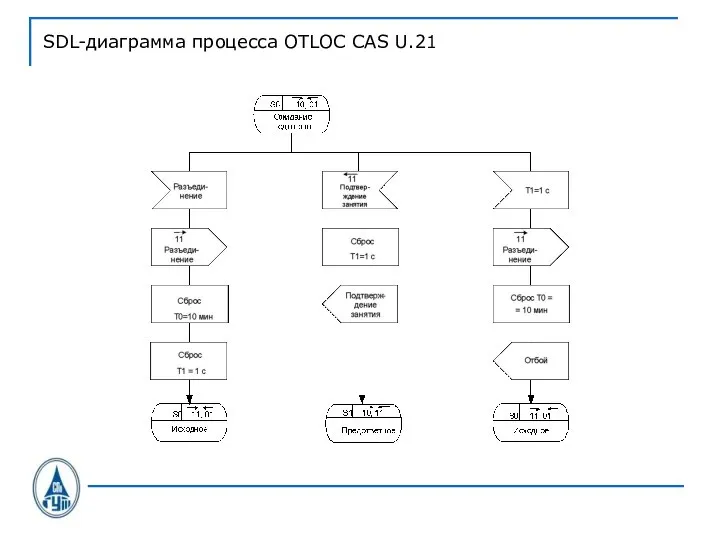
- 37. SDL-диаграмма процесса OTLOC CAS U.21
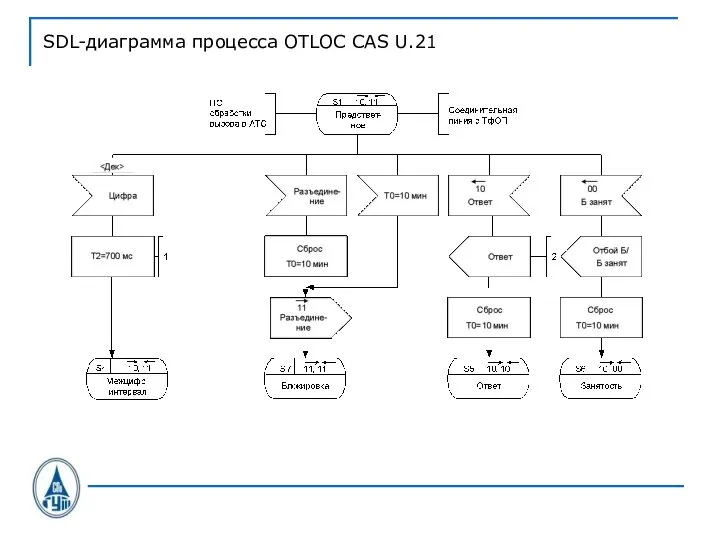
- 38. SDL-диаграмма процесса OTLOC CAS U.21
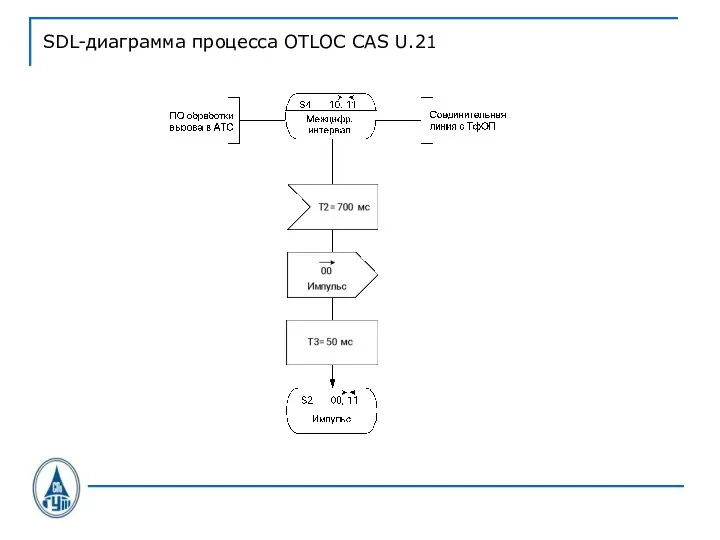
- 39. SDL-диаграмма процесса OTLOC CAS U.21
- 40. SDL-диаграмма процесса OTLOC CAS U.21
- 41. SDL-диаграмма процесса OTLOC CAS U.21
- 42. SDL-диаграмма процесса OTLOC CAS U.21
- 43. SDL-диаграмма процесса OTLOC CAS U.21
- 44. SDL-диаграмма процесса OTLOC CAS U.21
- 45. Изложение этого материала в: [Л1]. Параграф 8.2 [Л2]. Параграф 3.2
- 47. Скачать презентацию
Слайд 2Основная литература
Л1. Гольдштейн Б.С. Системы коммутации. Учебник для ВУЗов. 2-е издание, доп.
Основная литература
Л1. Гольдштейн Б.С. Системы коммутации. Учебник для ВУЗов. 2-е издание, доп.
Слайд 3Изложение этого материала в:
[Л1]. Параграф 1.7
[Л2]. Параграф 2.3
Изложение этого материала в:
[Л1]. Параграф 1.7
[Л2]. Параграф 2.3
![Изложение этого материала в: [Л1]. Параграф 1.7 [Л2]. Параграф 2.3](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1020236/slide-2.jpg)
Слайд 4
Язык описаний и спецификаций SDL.
Язык MSC (Message Sequence Chart).
Язык TTCN (Tree and
Язык описаний и спецификаций SDL. Язык MSC (Message Sequence Chart). Язык TTCN (Tree and
Слайд 6Элементы теории спецификаций ПО
Различные способы задания языков спецификаций:
Грамматики
Конечные автоматы
Спецификация должна быть конечным
Должен
Элементы теории спецификаций ПО
Различные способы задания языков спецификаций:
Грамматики
Конечные автоматы
Спецификация должна быть конечным
Должен
Слайд 7Конечные автоматы
Конечный автомат – это пятерка
M = (Q, Σ, δ, q0, F),
Конечные автоматы
Конечный автомат – это пятерка
M = (Q, Σ, δ, q0, F),
Слайд 8Детерминированные конечные автоматы
Автомат называется детерминированным, если множество δ(q, a) содержит не более
Детерминированные конечные автоматы
Автомат называется детерминированным, если множество δ(q, a) содержит не более
Слайд 9Недетерминированные и конечные автоматы
Любому недетерминированному автомату соответствует детерминированный автомат, определяющий тот же
Недетерминированные и конечные автоматы
Любому недетерминированному автомату соответствует детерминированный автомат, определяющий тот же
Слайд 10Минимизация конечного автомата
Как найти автомат, эквивалентный данному, с минимальным числом состояний?
Алгоритм минимизации
Минимизация конечного автомата
Как найти автомат, эквивалентный данному, с минимальным числом состояний?
Алгоритм минимизации
Слайд 11План:
SDL-система
SDL-блок
SDL-процесс
Синтаксис и семантика языка SDL
Примеры
План:
SDL-система
SDL-блок
SDL-процесс
Синтаксис и семантика языка SDL
Примеры
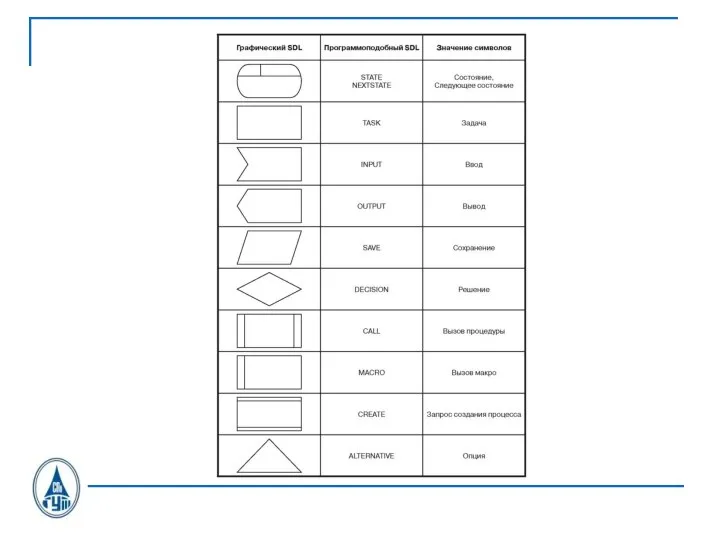
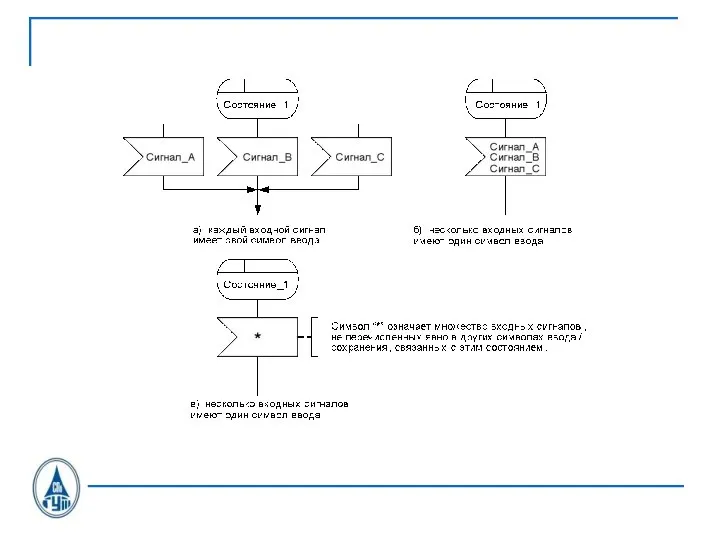
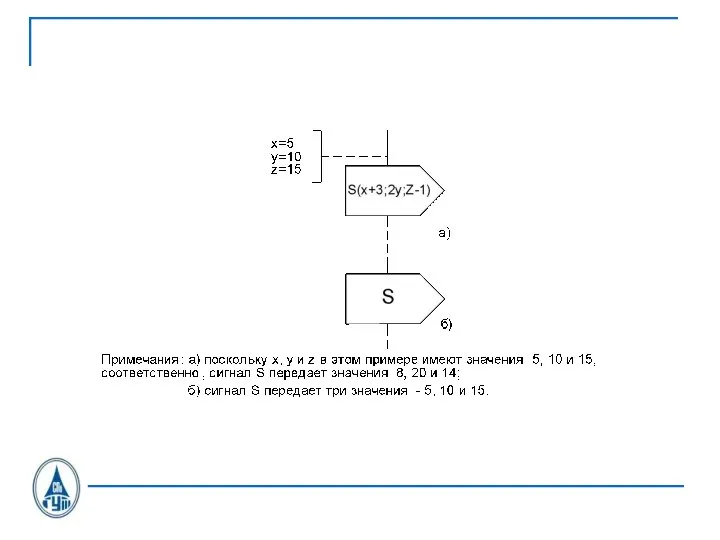
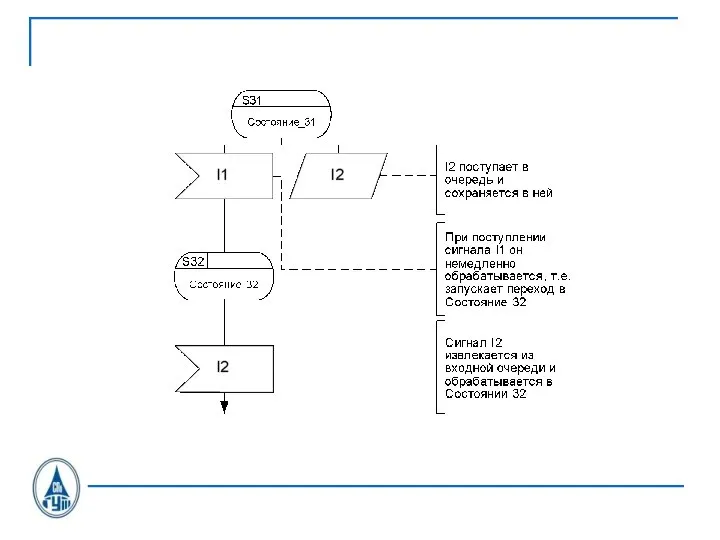
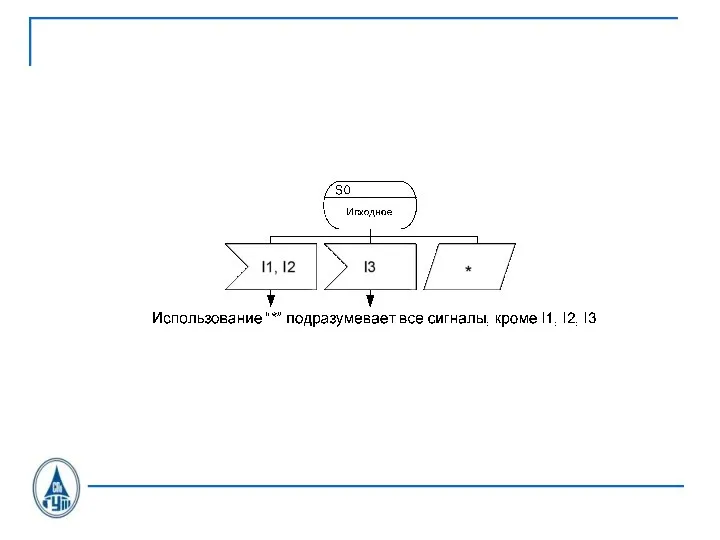
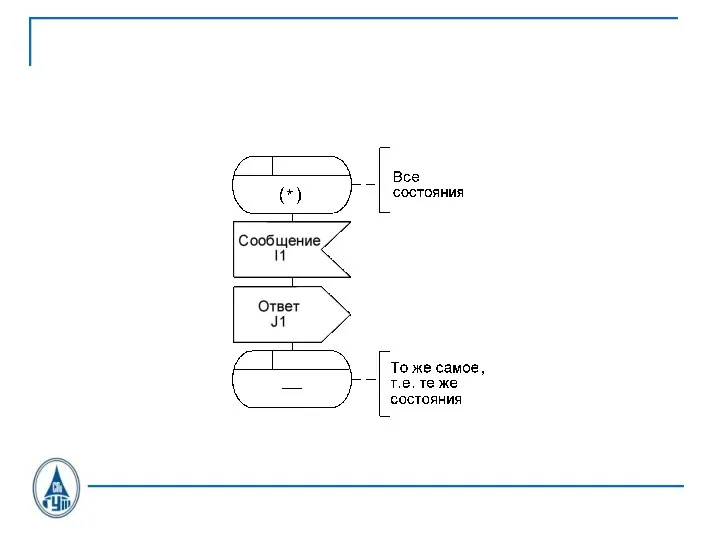
Слайд 26SDL состояния
INPUT
OUTPUT
SDL-диаграмма
SDL состояния
INPUT
OUTPUT
SDL-диаграмма
Слайд 32Изложение этого материала в:
[Л1]. Параграф 9.4.
[Л2]. Параграф 2.1, 2.2 и 2.3
Изложение этого материала в:
[Л1]. Параграф 9.4.
[Л2]. Параграф 2.1, 2.2 и 2.3
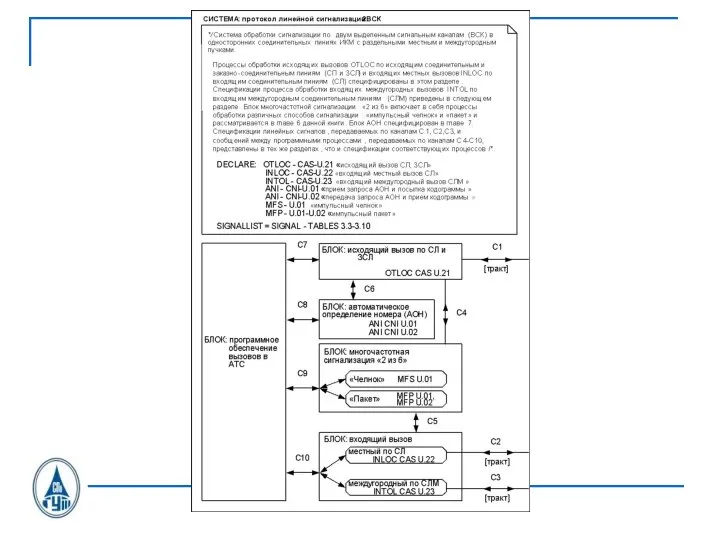
![Изложение этого материала в: [Л1]. Параграф 9.4. [Л2]. Параграф 2.1, 2.2 и 2.3](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1020236/slide-31.jpg)
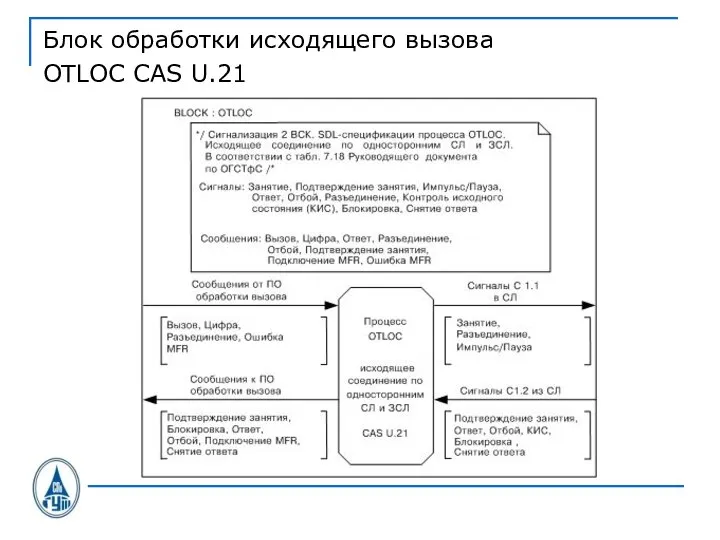
Слайд 33Блок обработки исходящего вызова
OTLOC CAS U.21
Блок обработки исходящего вызова
OTLOC CAS U.21
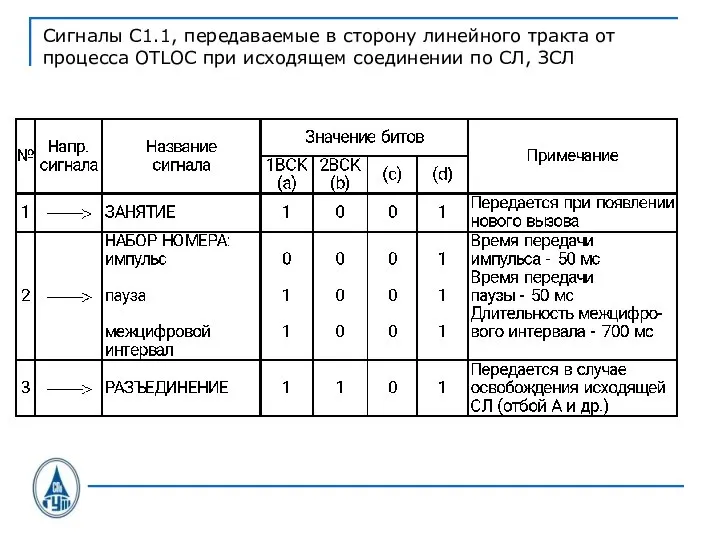
Слайд 34Сигналы С1.1, передаваемые в сторону линейного тракта от процесса OTLOC при исходящем
Сигналы С1.1, передаваемые в сторону линейного тракта от процесса OTLOC при исходящем
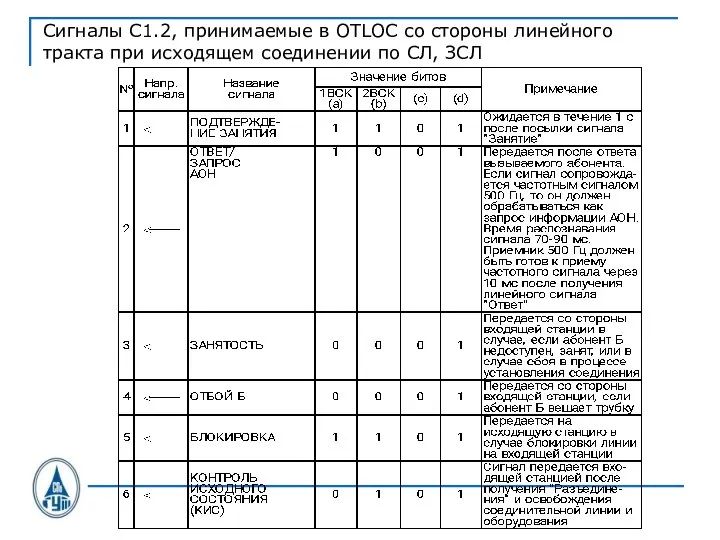
Слайд 35Сигналы С1.2, принимаемые в OTLOC со стороны линейного тракта при исходящем соединении
Сигналы С1.2, принимаемые в OTLOC со стороны линейного тракта при исходящем соединении
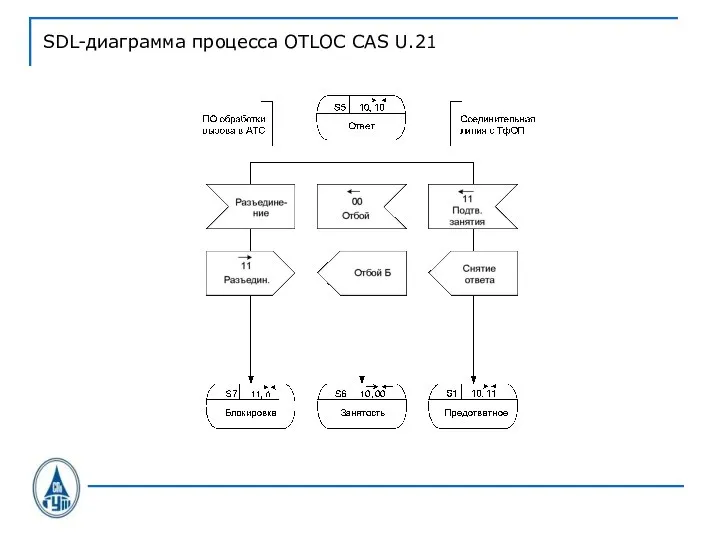
Слайд 36SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
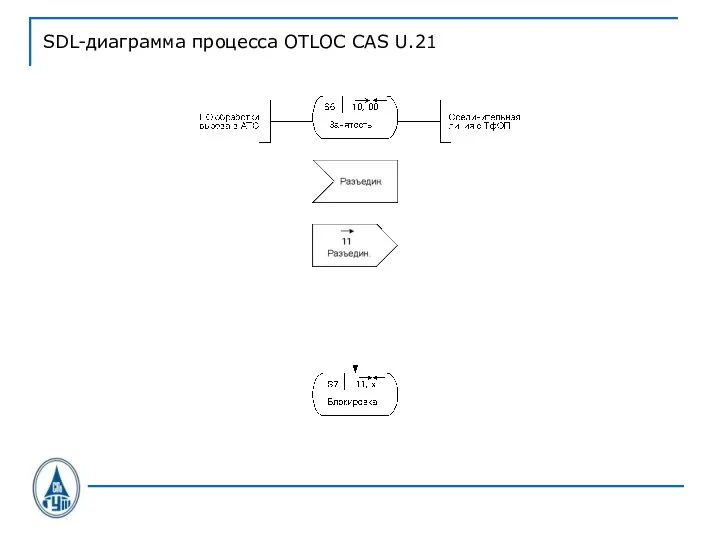
Слайд 37SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
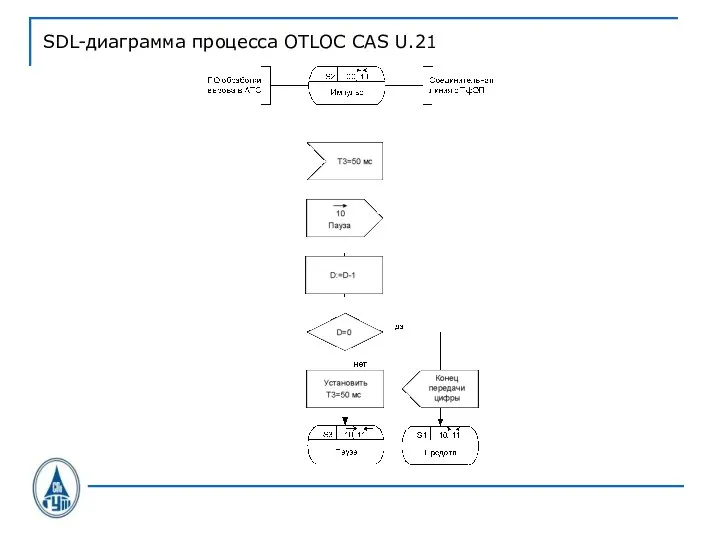
Слайд 38SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
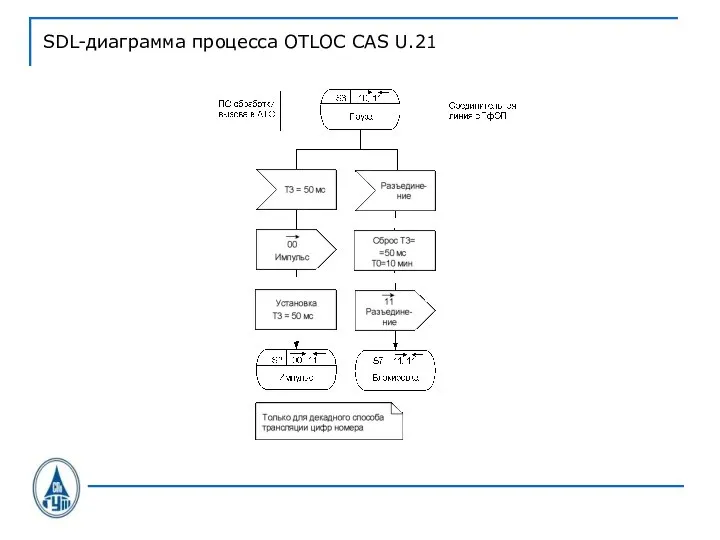
Слайд 39SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 40SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 41SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 42SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 43SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 44SDL-диаграмма процесса OTLOC CAS U.21
SDL-диаграмма процесса OTLOC CAS U.21
Слайд 45Изложение этого материала в:
[Л1]. Параграф 8.2
[Л2]. Параграф 3.2
Изложение этого материала в:
[Л1]. Параграф 8.2
[Л2]. Параграф 3.2
![Изложение этого материала в: [Л1]. Параграф 8.2 [Л2]. Параграф 3.2](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1020236/slide-44.jpg)
 Проект Private Limited Company Ya ABE, организация и сопровождение отдыха на воде
Проект Private Limited Company Ya ABE, организация и сопровождение отдыха на воде ПРАВИЛА ДОРОЖНОГО ДВИЖЕНИЯИ СТАТИСТИКА ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ
ПРАВИЛА ДОРОЖНОГО ДВИЖЕНИЯИ СТАТИСТИКА ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ Методики диагностики мотивации
Методики диагностики мотивации Единая информационная среда Северо-Западного образовательного округа
Единая информационная среда Северо-Западного образовательного округа ОСОБЕННОСТИ НАЦИОНАЛЬНОЙ ОХОТЫ
ОСОБЕННОСТИ НАЦИОНАЛЬНОЙ ОХОТЫ Анализ результатов деятельности ОУ и планирование изменений
Анализ результатов деятельности ОУ и планирование изменений Презентация на тему вязание крючком
Презентация на тему вязание крючком Летние каникулы на английском
Летние каникулы на английском Норма права. Булыгин, Кельзен, Хофельд, Харт
Норма права. Булыгин, Кельзен, Хофельд, Харт «ЧТОБЫ ЗНАЛИ И ПОМНИЛИ !»
«ЧТОБЫ ЗНАЛИ И ПОМНИЛИ !» Концентрация растворов. Массовая доля вещества
Концентрация растворов. Массовая доля вещества MY BEST FRIENDs
MY BEST FRIENDs Ювенальная юстиция Австралии
Ювенальная юстиция Австралии История и символика древнерусской иконописи
История и символика древнерусской иконописи Архитектурные элементы здания. ИЗО 8 класс
Архитектурные элементы здания. ИЗО 8 класс Социология Фердинанда Тенниса (1855-1936, Германия)
Социология Фердинанда Тенниса (1855-1936, Германия) О чем рассказали волокна
О чем рассказали волокна Православный приход храма во имя святого праведного Иова многострадального
Православный приход храма во имя святого праведного Иова многострадального Halloween. Vocabulary
Halloween. Vocabulary 1 2 На протяжении 60 лет ISKRAEMECO является одним из мировых лидеров в области производства приборов и систем учета. На сегодняшний день I
1 2 На протяжении 60 лет ISKRAEMECO является одним из мировых лидеров в области производства приборов и систем учета. На сегодняшний день I Эмоционально-чувственные процессы: страх и ужас
Эмоционально-чувственные процессы: страх и ужас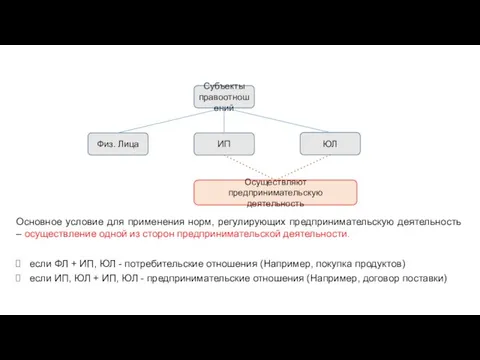 Субъекты правоотношений
Субъекты правоотношений МДОУ Анисимовский детский сад «Звездочка»
МДОУ Анисимовский детский сад «Звездочка» Конфликты: разрушение или созидание?
Конфликты: разрушение или созидание? Простые и составные числа
Простые и составные числа Новости
Новости Эх, где бы воды напиться?
Эх, где бы воды напиться? Требования ОАО «Холдинг МРСК» к подрядным организациям в области управления проектами строительства электросетевых объектов.
Требования ОАО «Холдинг МРСК» к подрядным организациям в области управления проектами строительства электросетевых объектов.