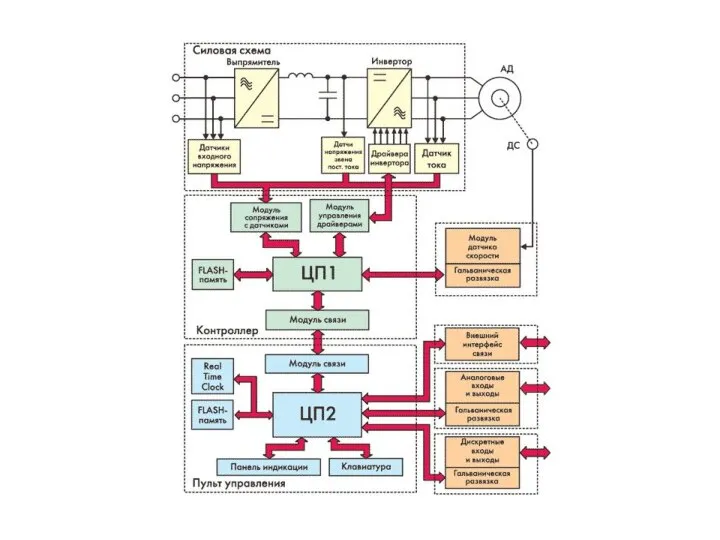
- Микропроцессорные системы управления двигателями переменного тока

Содержание
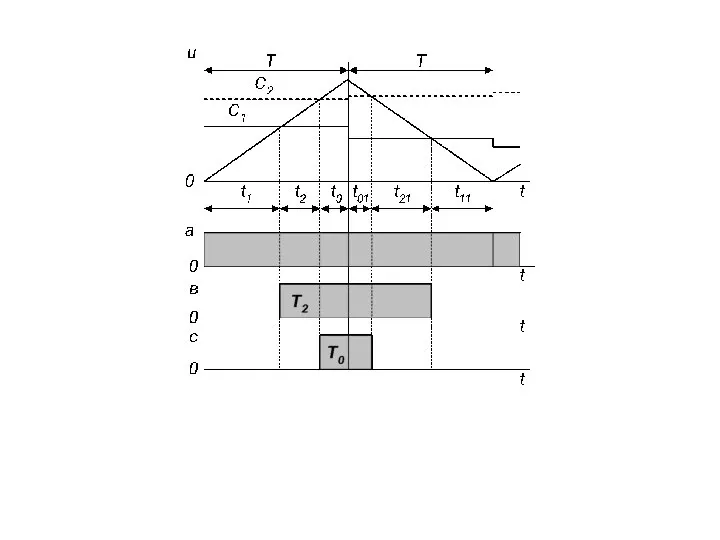
- 5. Рис.3.14.Таблица кодов драйвера (а ) , драйвер (б).
- 10. .
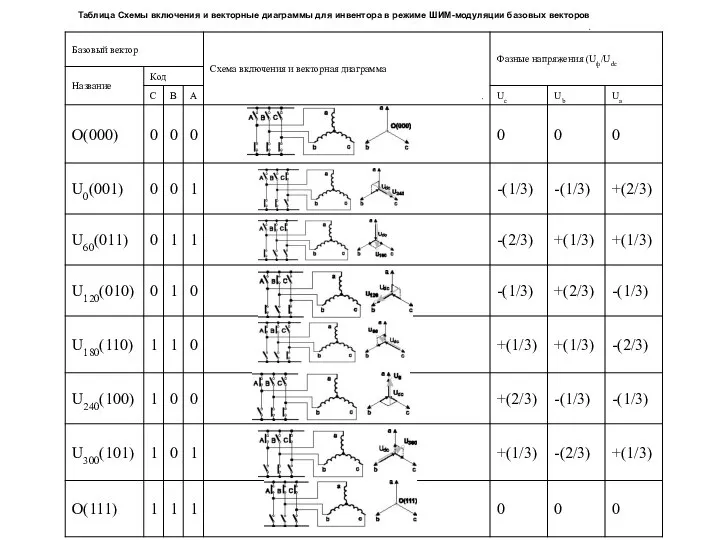
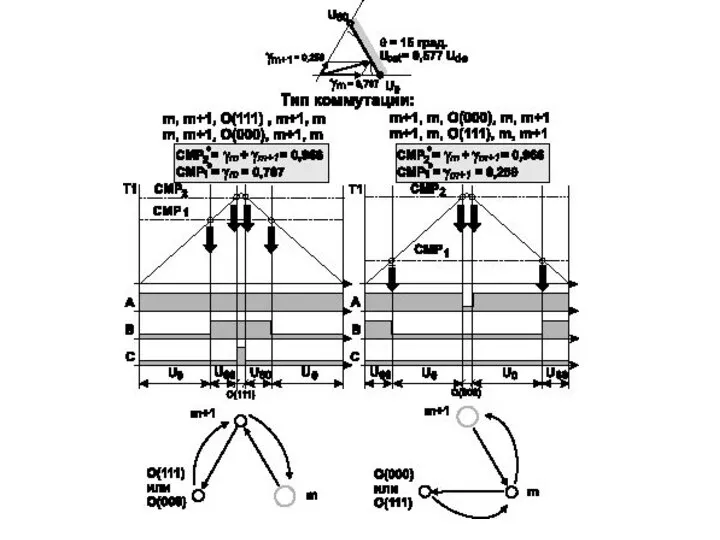
- 16. Таблица Схемы включения и векторные диаграммы для инвентора в режиме ШИМ-модуляции базовых векторов
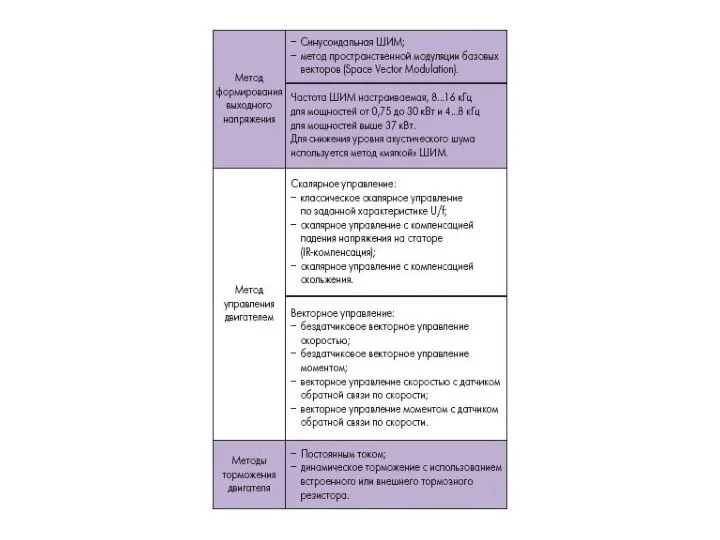
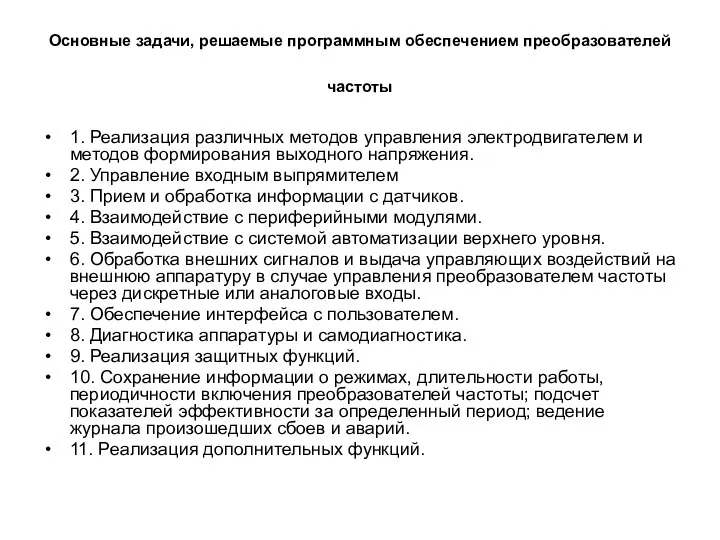
- 24. Основные задачи, решаемые программным обеспечением преобразователей частоты 1. Реализация различных методов управления электродвигателем и методов формирования
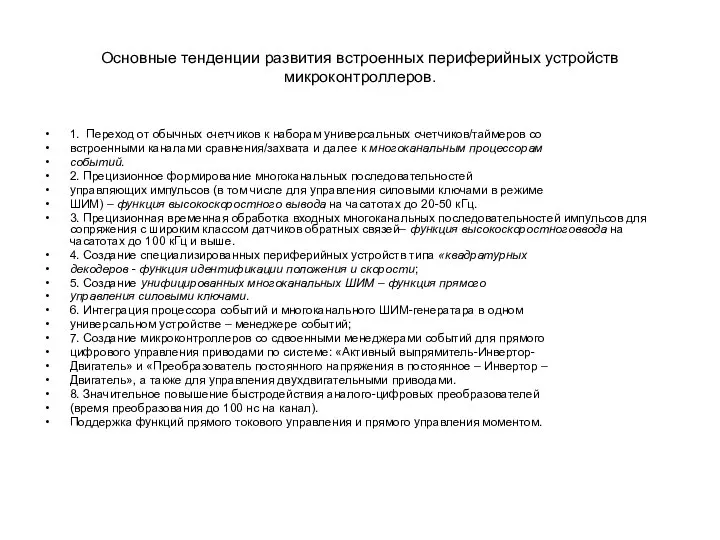
- 26. Основные тенденции развития встроенных периферийных устройств микроконтроллеров. 1. Переход от обычных счетчиков к наборам универсальных счетчиков/таймеров
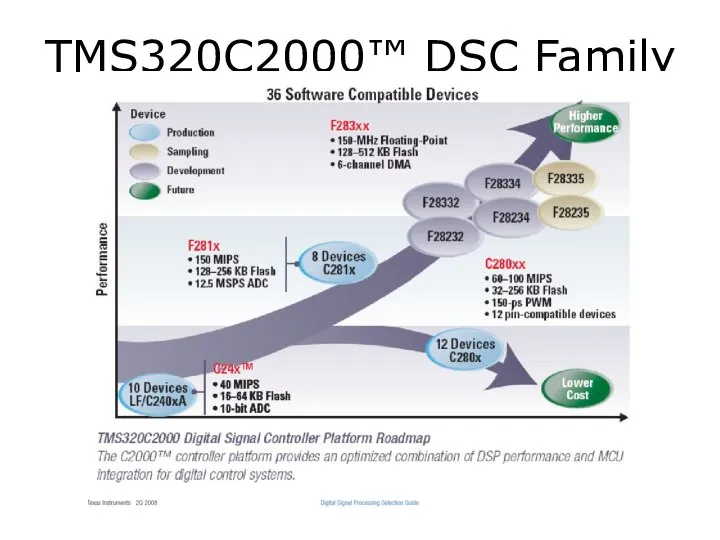
- 29. TMS320C2000™ DSC Family
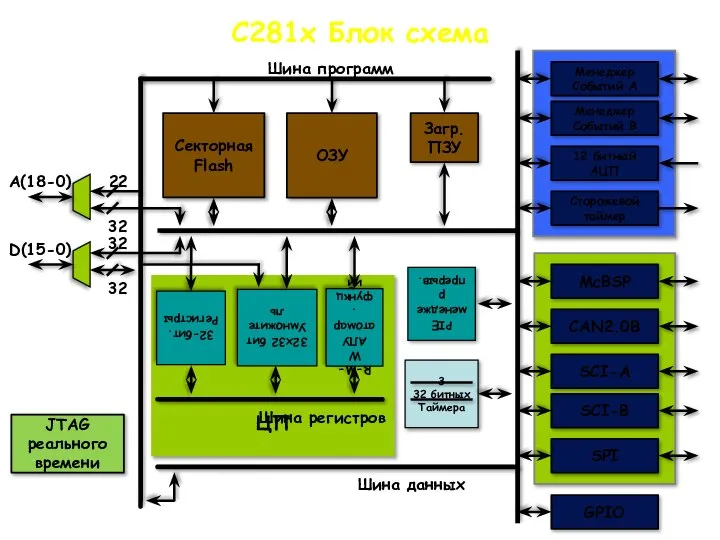
- 32. ЦП C281x Блок схема 32x32 бит Умножитель Секторная Flash A(18-0) D(15-0) Шина программ Шина данных ОЗУ
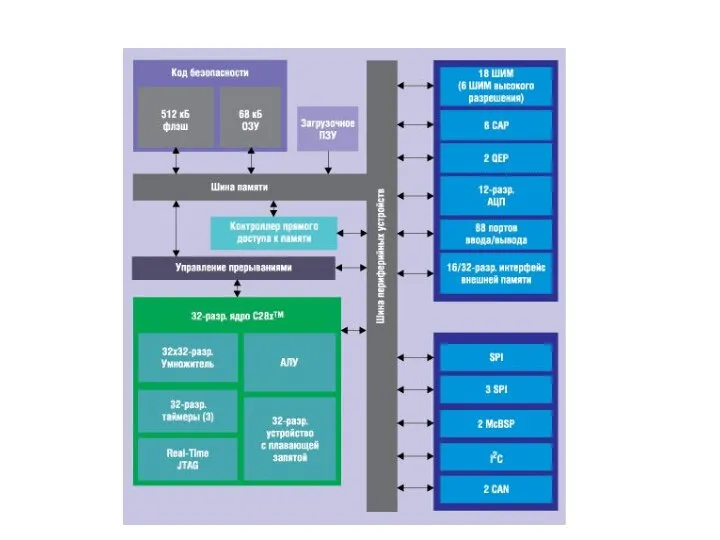
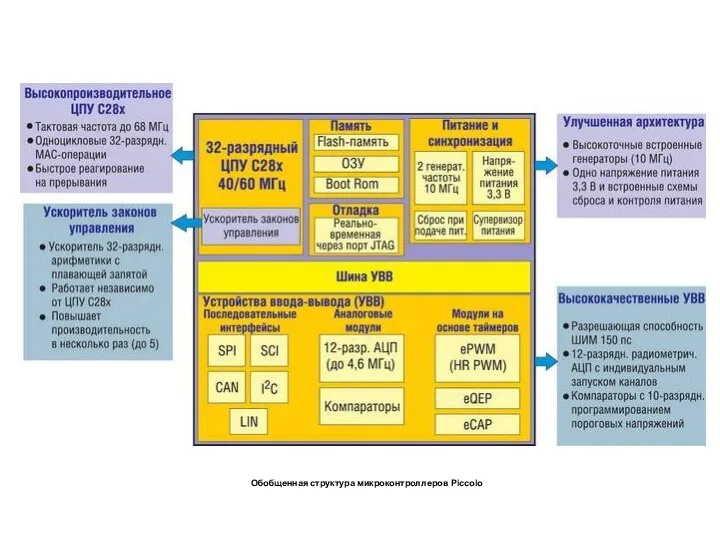
- 34. Обобщенная структура микроконтроллеров Piccolo
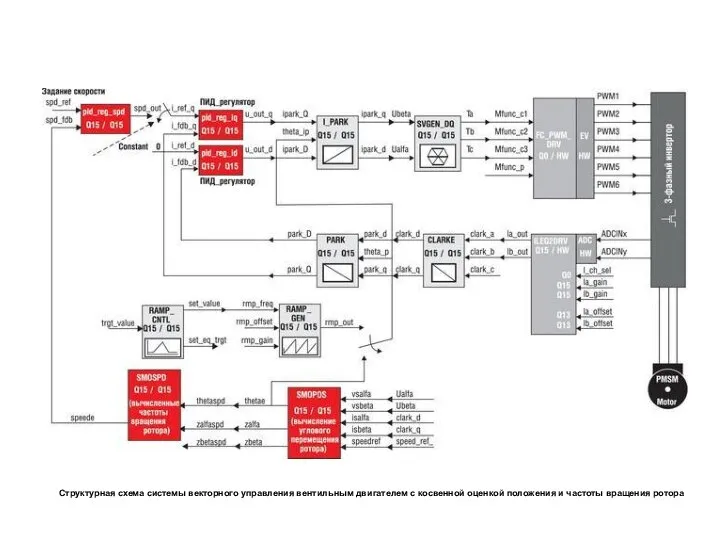
- 35. Структурная схема системы векторного управления вентильным двигателем с косвенной оценкой положения и частоты вращения ротора
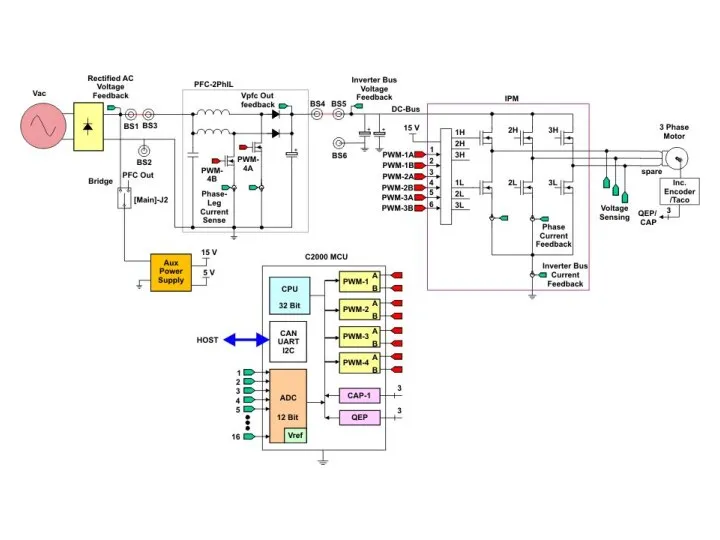
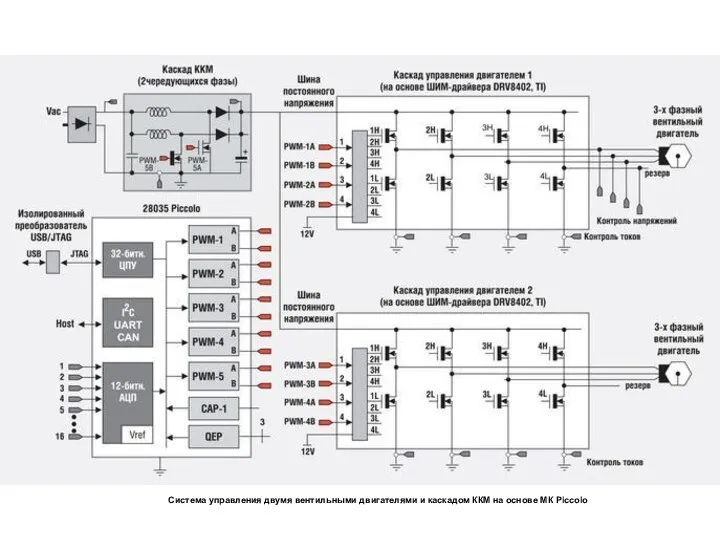
- 36. Система управления двумя вентильными двигателями и каскадом ККМ на основе МК Piccolo
- 37. На рисунке выше: СontrolSTICK Piccolo TMX20F28027 Деталь№: TMDX28027USB $39
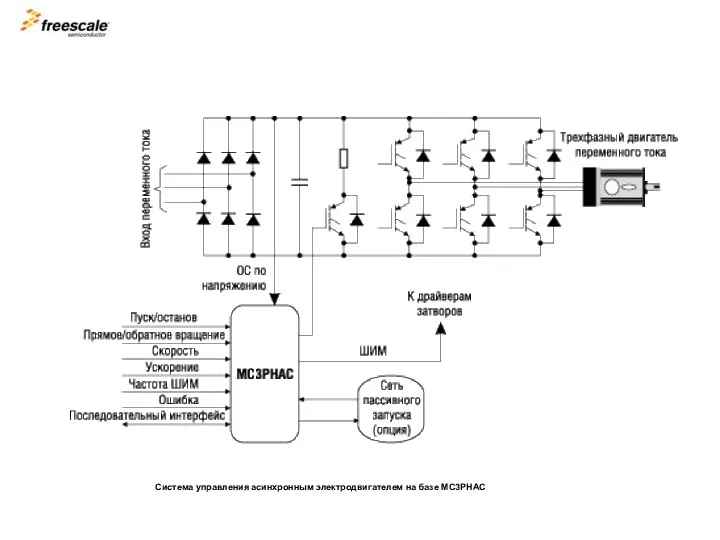
- 38. Система управления асинхронным электродвигателем на базе MC3PHAC
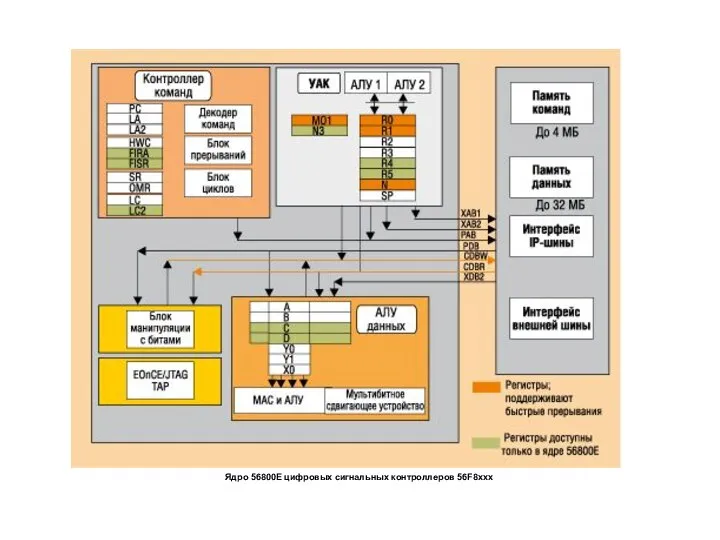
- 39. Ядро 56800Е цифровых сигнальных контроллеров 56F8xxx
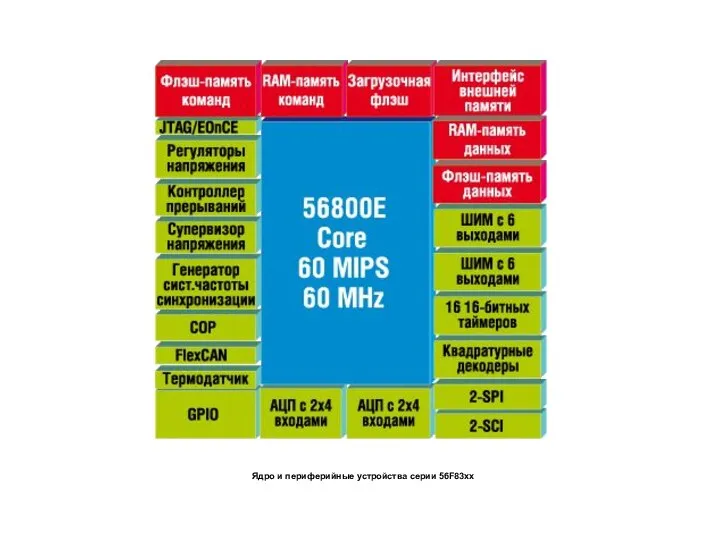
- 40. Ядро и периферийные устройства серии 56F83xx
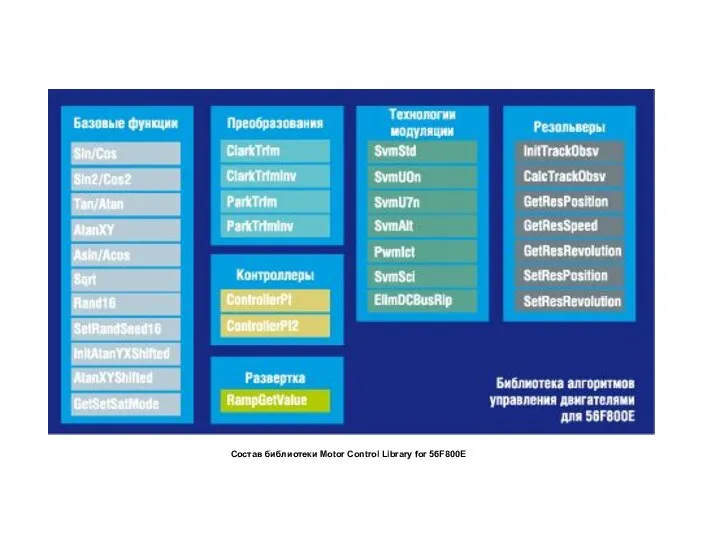
- 41. Состав библиотеки Motor Control Library for 56F800E
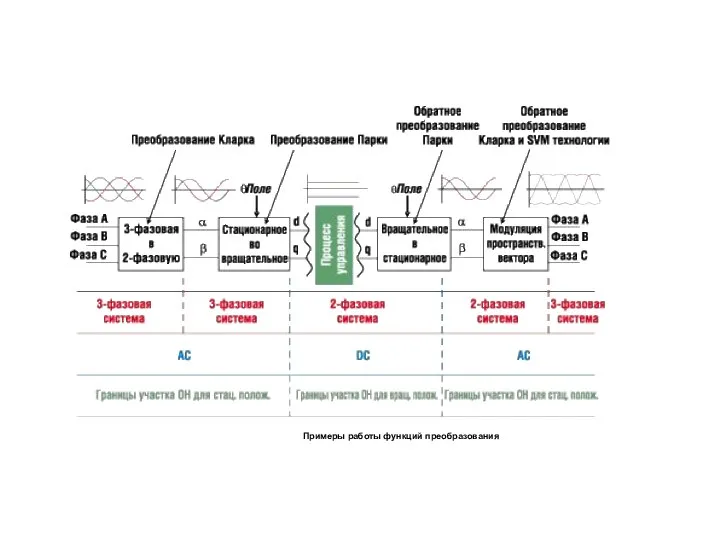
- 42. Примеры работы функций преобразования
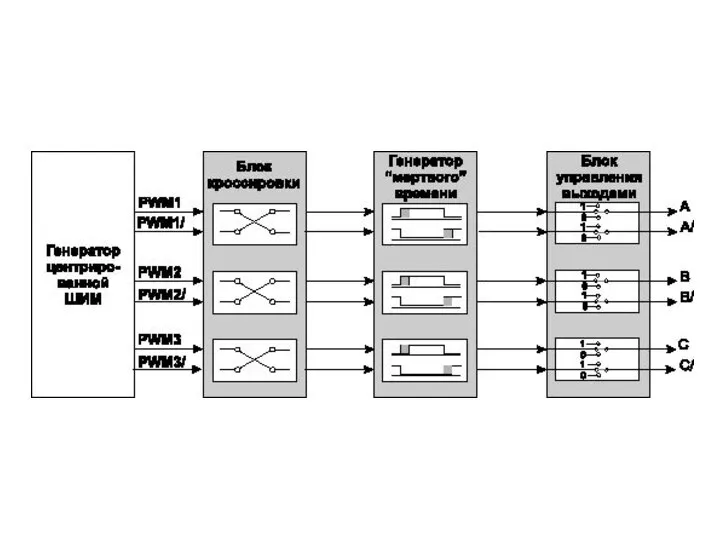
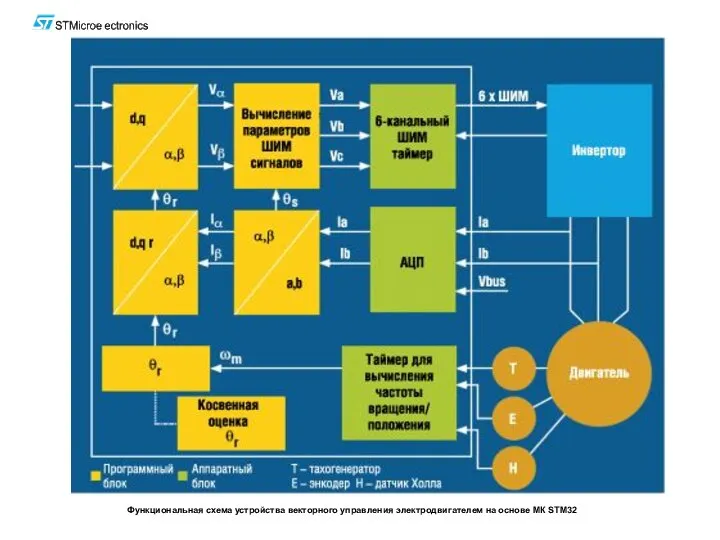
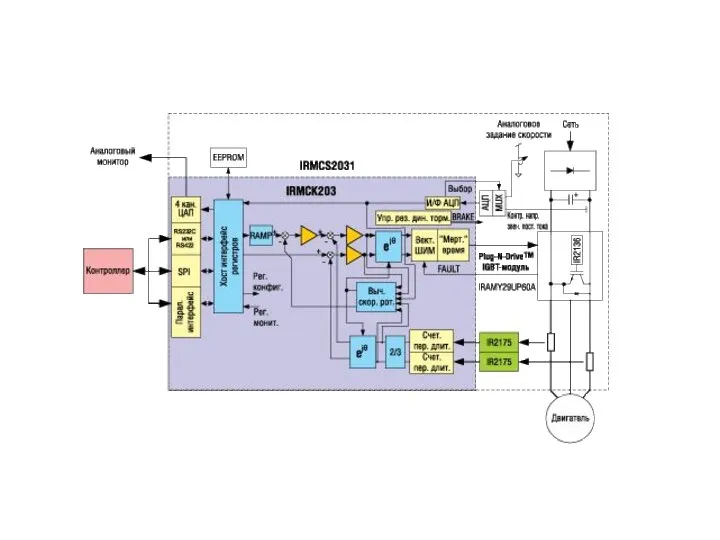
- 43. Функциональная схема устройства векторного управления электродвигателем на основе МК STM32
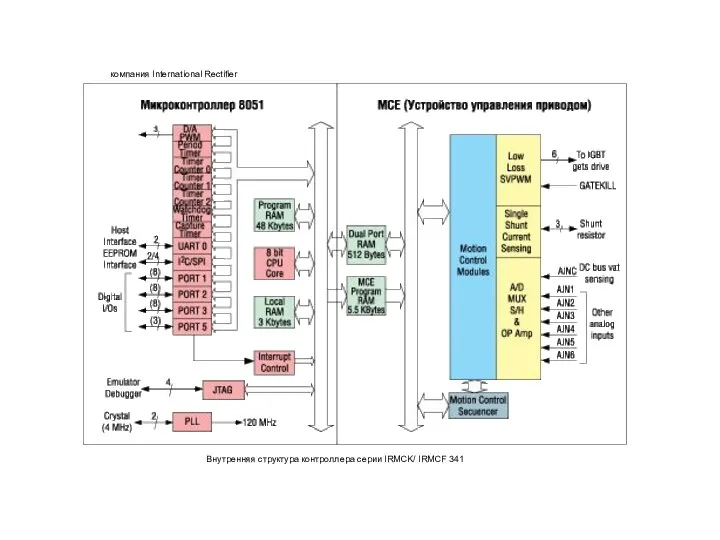
- 44. компания International Rectifier Внутренняя структура контроллера серии IRMCK/ IRMCF 341
- 48. Скачать презентацию
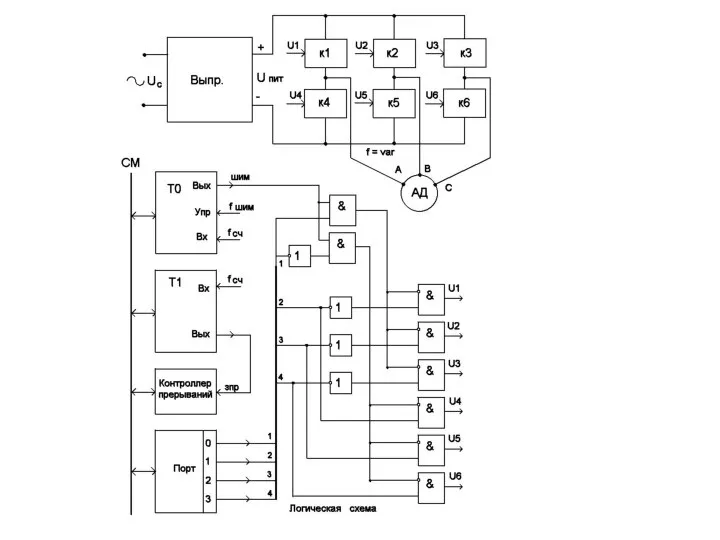
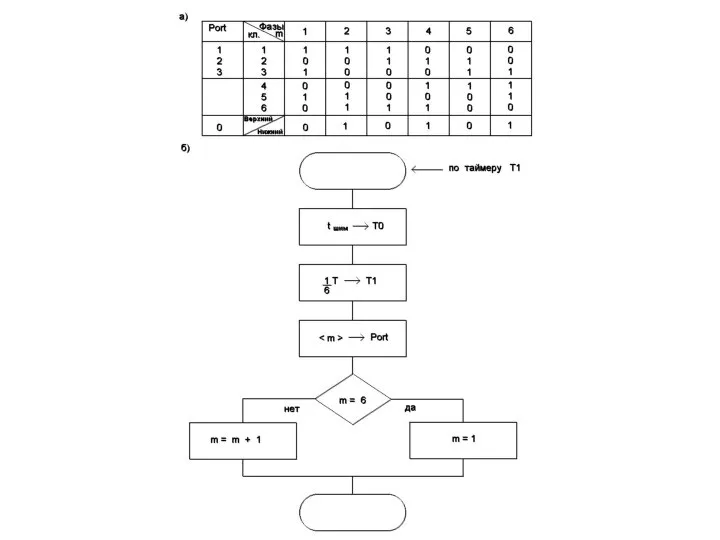
Слайд 5Рис.3.14.Таблица кодов драйвера (а ) , драйвер (б).
Рис.3.14.Таблица кодов драйвера (а ) , драйвер (б).
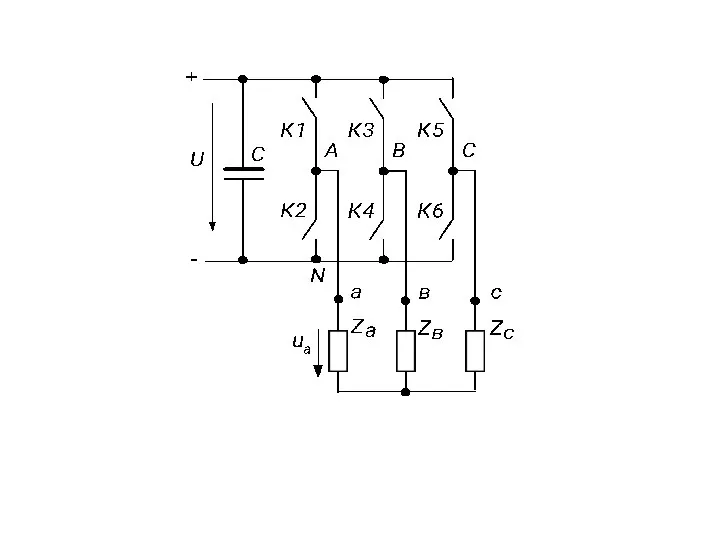
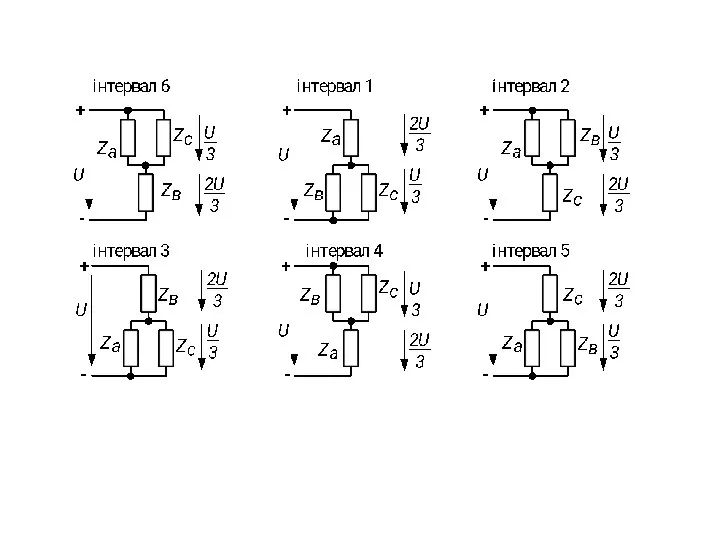
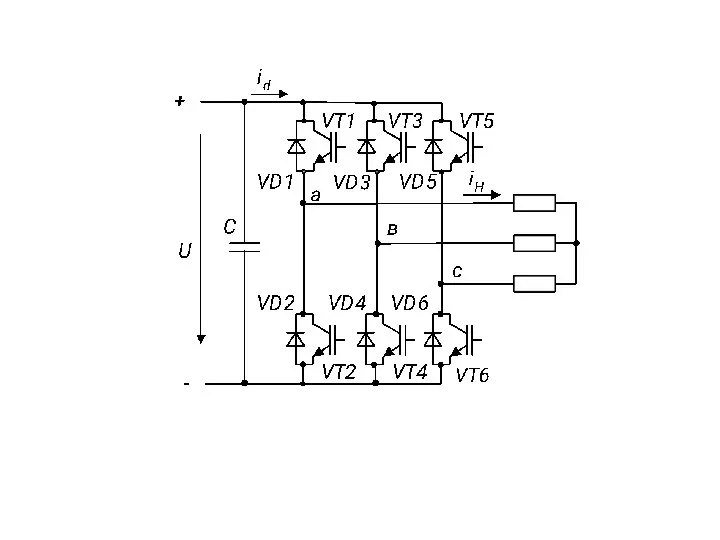
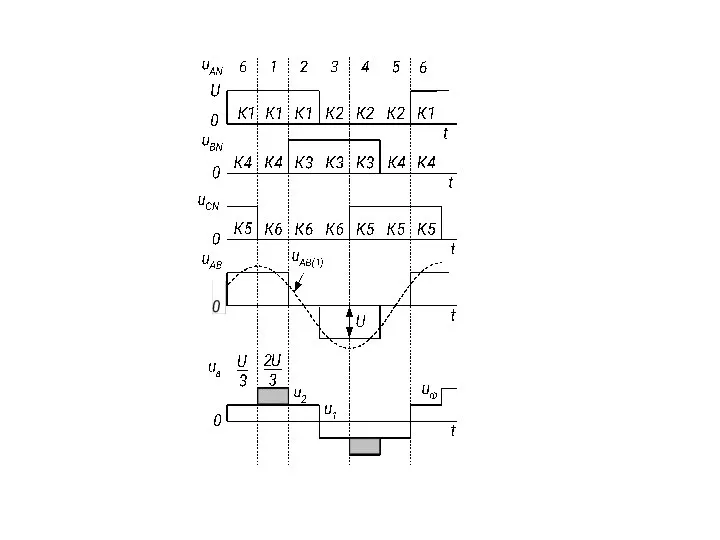
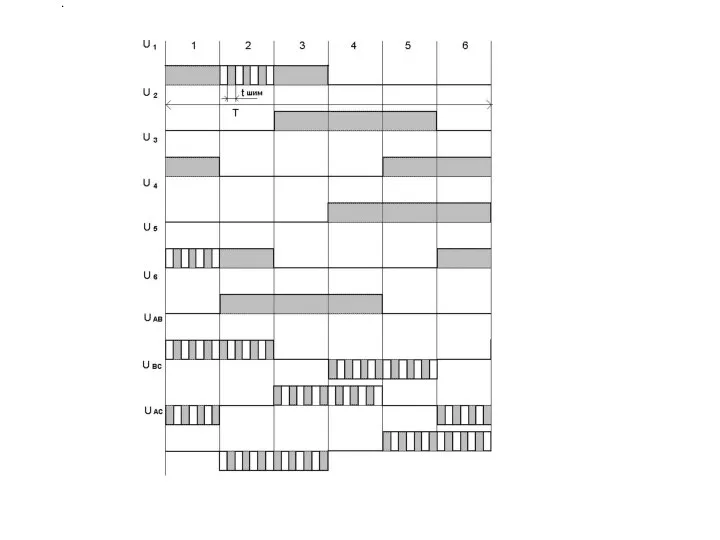
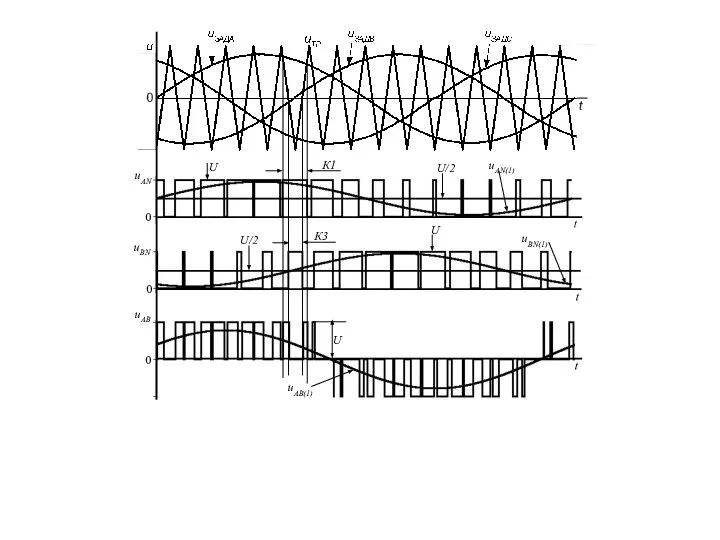
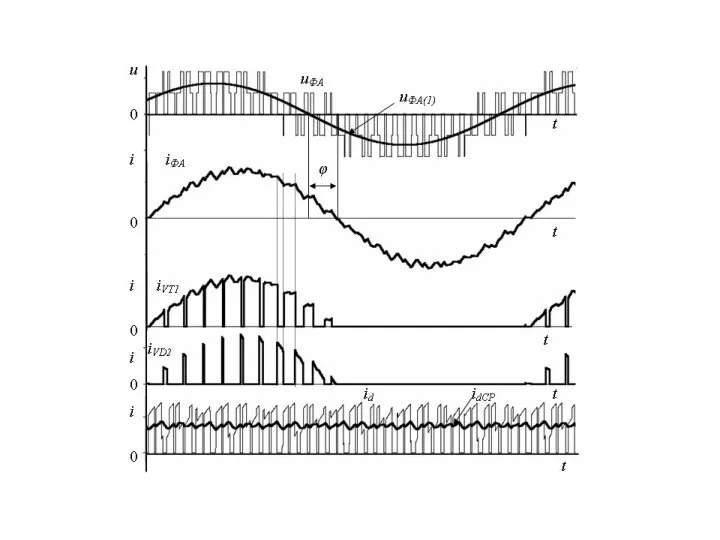
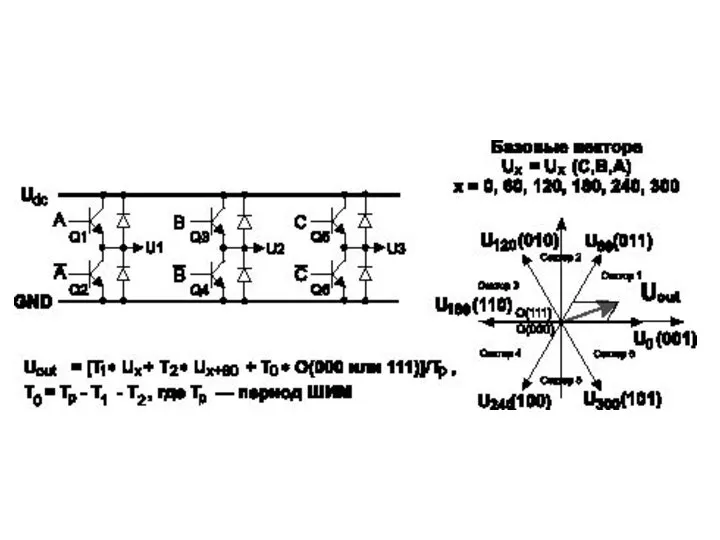
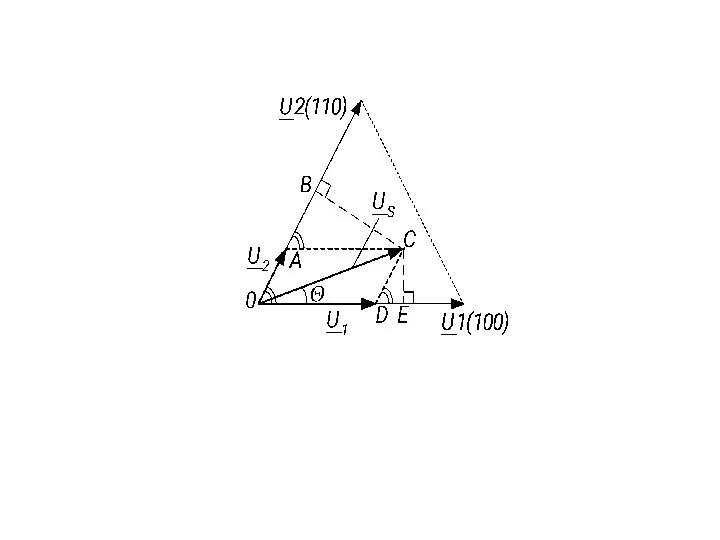
Слайд 16Таблица Схемы включения и векторные диаграммы для инвентора в режиме ШИМ-модуляции базовых
Таблица Схемы включения и векторные диаграммы для инвентора в режиме ШИМ-модуляции базовых
Слайд 24Основные задачи, решаемые программным обеспечением преобразователей частоты
1. Реализация различных методов управления
Основные задачи, решаемые программным обеспечением преобразователей частоты
1. Реализация различных методов управления
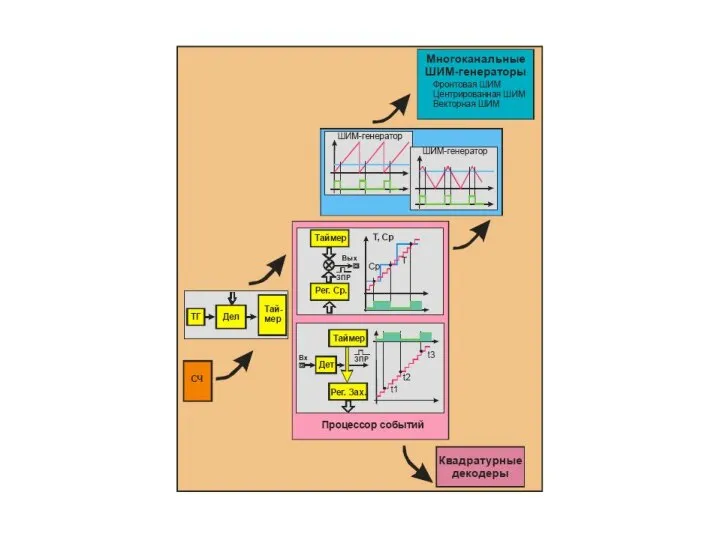
Слайд 26Основные тенденции развития встроенных периферийных устройств
микроконтроллеров.
1. Переход от обычных счетчиков к наборам
Основные тенденции развития встроенных периферийных устройств
микроконтроллеров.
1. Переход от обычных счетчиков к наборам
Слайд 29TMS320C2000™ DSC Family
TMS320C2000™ DSC Family
Слайд 32
ЦП
C281x Блок схема
32x32 бит
Умножитель
Секторная
Flash
A(18-0)
D(15-0)
Шина программ
Шина данных
ОЗУ
Загр.
ПЗУ
22
32-бит.
Регистры
3
32 битных
Таймера
JTAG
реального
времени
Шина регистров
R-M-W
АЛУ
атомар.
функций
PIE
менеджер
прерыв.
32
32
32
Менеджер Событий А
Менеджер
ЦП
C281x Блок схема
32x32 бит
Умножитель
Секторная
Flash
A(18-0)
D(15-0)
Шина программ
Шина данных
ОЗУ
Загр.
ПЗУ
22
32-бит.
Регистры
3
32 битных
Таймера
JTAG
реального
времени
Шина регистров
R-M-W
АЛУ
атомар.
функций
PIE
менеджер
прерыв.
32
32
32
Менеджер Событий А
Менеджер

Слайд 34Обобщенная структура микроконтроллеров Piccolo
Обобщенная структура микроконтроллеров Piccolo
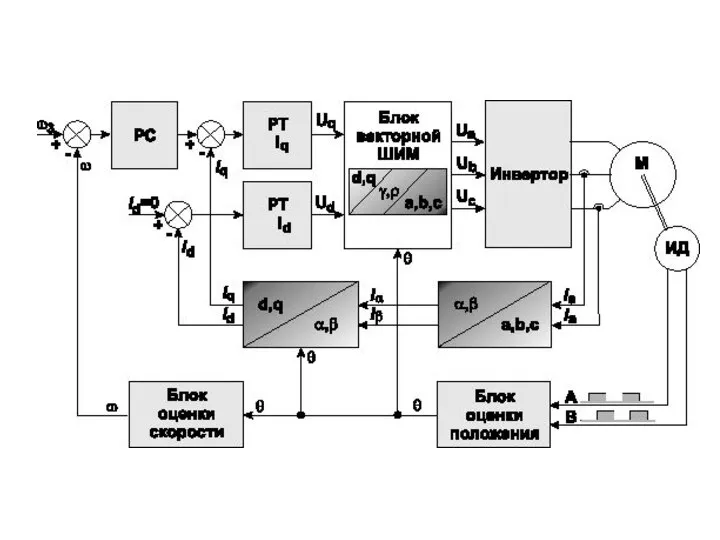
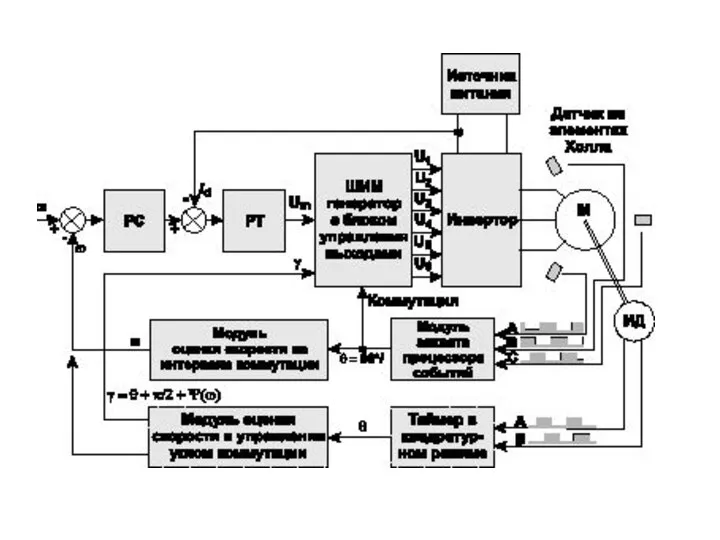
Слайд 35Структурная схема системы векторного управления вентильным двигателем с косвенной оценкой положения и
Структурная схема системы векторного управления вентильным двигателем с косвенной оценкой положения и
Слайд 36Система управления двумя вентильными двигателями и каскадом ККМ на основе МК Piccolo
Система управления двумя вентильными двигателями и каскадом ККМ на основе МК Piccolo
Слайд 37На рисунке выше: СontrolSTICK Piccolo TMX20F28027 Деталь№: TMDX28027USB $39
На рисунке выше: СontrolSTICK Piccolo TMX20F28027 Деталь№: TMDX28027USB $39

Слайд 38Система управления асинхронным электродвигателем на базе MC3PHAC
Система управления асинхронным электродвигателем на базе MC3PHAC
Слайд 39Ядро 56800Е цифровых сигнальных контроллеров 56F8xxx
Ядро 56800Е цифровых сигнальных контроллеров 56F8xxx
Слайд 40Ядро и периферийные устройства серии 56F83xx
Ядро и периферийные устройства серии 56F83xx
Слайд 41Состав библиотеки Motor Control Library for 56F800E
Состав библиотеки Motor Control Library for 56F800E
Слайд 42Примеры работы функций преобразования
Примеры работы функций преобразования
Слайд 43Функциональная схема устройства векторного управления электродвигателем на основе МК STM32
Функциональная схема устройства векторного управления электродвигателем на основе МК STM32
Слайд 44компания International Rectifier
Внутренняя структура контроллера серии IRMCK/ IRMCF 341
компания International Rectifier
Внутренняя структура контроллера серии IRMCK/ IRMCF 341
 Жирорастворимые витамины
Жирорастворимые витамины @valeriy_platon Идеи для стартапов IT в образовании 16 ноября 2011, Москва. - презентация
@valeriy_platon Идеи для стартапов IT в образовании 16 ноября 2011, Москва. - презентация Природоохранное законодательство РФ Сембина А., Федулова В.
Природоохранное законодательство РФ Сембина А., Федулова В.  У истоков «денежной» макроэкономики: К.Викселль и И.Фишер
У истоков «денежной» макроэкономики: К.Викселль и И.Фишер Греческие вазы. Роспись по мотивам
Греческие вазы. Роспись по мотивам Treści kształcenia — kryteria doboru treści
Treści kształcenia — kryteria doboru treści Школы буддизма
Школы буддизма Монитор
Монитор Глашатай революции
Глашатай революции Организация и проведение ГИА выпускников IX классов в 2014 г.
Организация и проведение ГИА выпускников IX классов в 2014 г. Безударные гласные - презентация для начальной школы_
Безударные гласные - презентация для начальной школы_ Правовая система РФ
Правовая система РФ Презентация на тему Внеклассное мероприятие «Здравствуй, школа!» (День знаний в 1 классе)
Презентация на тему Внеклассное мероприятие «Здравствуй, школа!» (День знаний в 1 классе) Приготовление котлетной массы из птицы и полуфабрикатов из нее
Приготовление котлетной массы из птицы и полуфабрикатов из нее РАНХиГС. Приемная кампания
РАНХиГС. Приемная кампания Гимнастика. Виды гимнастики
Гимнастика. Виды гимнастики Международная летняя школа О России по-русски 2019
Международная летняя школа О России по-русски 2019 Курица с морковкой и луком
Курица с морковкой и луком Образовательный проект по корпоративному обучению иностранным языкам «Логос Экспресс Профи»
Образовательный проект по корпоративному обучению иностранным языкам «Логос Экспресс Профи» Метод проектов как одно из условий формирования ключевых компетенций
Метод проектов как одно из условий формирования ключевых компетенций Мастер по перманентному макияжу
Мастер по перманентному макияжу Россия в годы правления Александра II
Россия в годы правления Александра II Готы
Готы Приёмы арт-терапии: изобразительная техника. Составитель: педагог-психолог Лукьянова Наталья Владимировна
Приёмы арт-терапии: изобразительная техника. Составитель: педагог-психолог Лукьянова Наталья Владимировна ПОРТФОЛИО
ПОРТФОЛИО Проект «Организация сбора макулатуры в районе Северное Измайлово»
Проект «Организация сбора макулатуры в районе Северное Измайлово» Жесткий курс Николая I
Жесткий курс Николая I Персонализированная реклама территорий
Персонализированная реклама территорий