- Модель манипулятора

Содержание
- 2. Основу манипуляторов составляют пространственные механизмы со многими степенями свободы. Манипуляторы выполняют работы в средах, недоступных или
- 3. Цель творческой работы: на базе конструктора Lego WeDo 2.0 создать МОДЕЛь робота-манипулятора по собственному замыслу. Задачи:
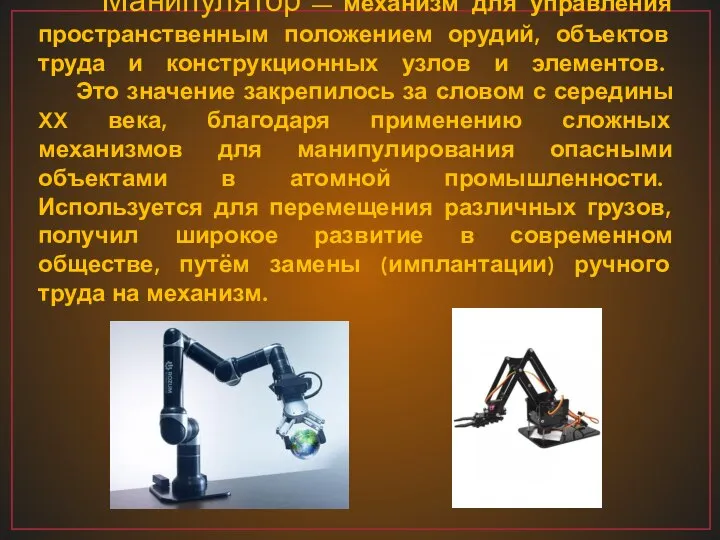
- 4. Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это
- 5. Применение манипуляторов Манипулятор (в горном деле) Манипулятор (в металлургии) Манипулятор (в ядерной технике) Манипуляторами оснащаются гидростаты
- 6. Применение манипуляторов
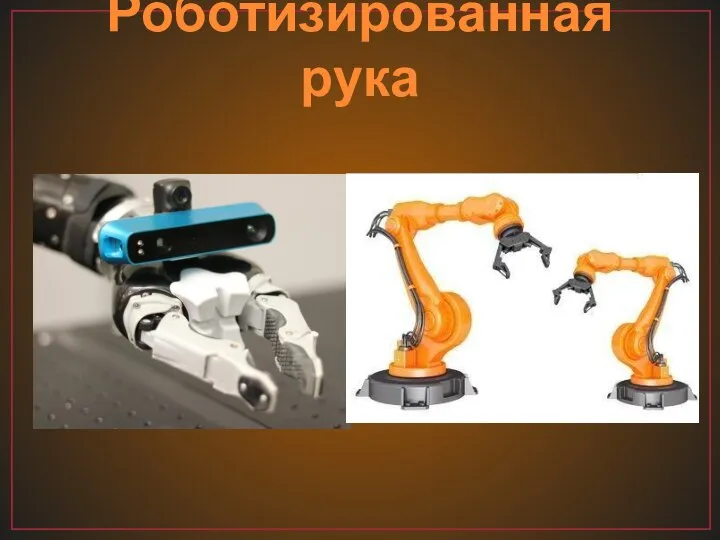
- 7. Роботизированная рука
- 8. Роботизированная рука
- 9. Модель Роботизированная рука
- 10. Модель Роботизированная рука
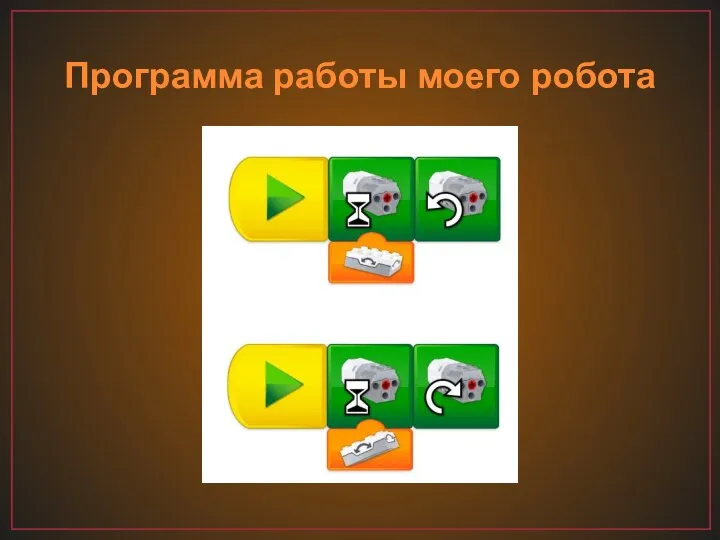
- 11. Программа работы моего робота
- 12. Выводы Работая над проектом, я: изучил простейшие механизмы и их применение в конструкциях роботов, понял как
- 14. Скачать презентацию
Слайд 2Основу манипуляторов составляют пространственные механизмы со многими степенями свободы.
Манипуляторы выполняют работы
Основу манипуляторов составляют пространственные механизмы со многими степенями свободы.
Манипуляторы выполняют работы

Слайд 3Цель творческой работы:
на базе конструктора Lego WeDo 2.0 создать МОДЕЛь робота-манипулятора
Цель творческой работы: на базе конструктора Lego WeDo 2.0 создать МОДЕЛь робота-манипулятора
Слайд 4 Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и
Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и
Слайд 5Применение манипуляторов
Манипулятор (в горном деле)
Манипулятор (в металлургии)
Манипулятор (в ядерной технике)
Применение манипуляторов
Манипулятор (в горном деле)
Манипулятор (в металлургии)
Манипулятор (в ядерной технике)
Слайд 6Применение манипуляторов
Применение манипуляторов

Слайд 7Роботизированная рука
Роботизированная рука

Слайд 8Роботизированная рука
Роботизированная рука
Слайд 9Модель Роботизированная рука
Модель Роботизированная рука

Слайд 10Модель Роботизированная рука
Модель Роботизированная рука

Слайд 11Программа работы моего робота
Программа работы моего робота
Слайд 12Выводы
Работая над проектом, я:
изучил простейшие механизмы и их применение в конструкциях роботов,
Выводы
Работая над проектом, я:
изучил простейшие механизмы и их применение в конструкциях роботов,
 ПОРТФОЛИО ВОСПИТАТЕЛЯ
ПОРТФОЛИО ВОСПИТАТЕЛЯ Презентация на тему Минойская цивилизация
Презентация на тему Минойская цивилизация  PHIL 1- Lecture 3 - Week 3 moodle
PHIL 1- Lecture 3 - Week 3 moodle Железнодорожный тоннель
Железнодорожный тоннель FINANCIAL ANALYSIS AND
FINANCIAL ANALYSIS AND Использование проектной методики в обучении иностранному языку
Использование проектной методики в обучении иностранному языку Система права
Система права Гигиена питания
Гигиена питания Гигиена коз и овец
Гигиена коз и овец Использование ФЦИОР на уроках физики
Использование ФЦИОР на уроках физики Налоговый вычет по ценным бумагам
Налоговый вычет по ценным бумагам Доли федеральных телеканалов при национальном и региональном размещении рекламы
Доли федеральных телеканалов при национальном и региональном размещении рекламы Презентация WasteVEM процесса
Презентация WasteVEM процесса Фея Флора. Богиня цветов и весны. С приходом весны властвовала над всеми живыми существами. Имя образовано от flos ("цветок"). По леген
Фея Флора. Богиня цветов и весны. С приходом весны властвовала над всеми живыми существами. Имя образовано от flos ("цветок"). По леген Старшов Петр Павлович
Старшов Петр Павлович Классицизм в литературе
Классицизм в литературе Методическая тема
Методическая тема He’s. She
He’s. She Программа коррекции синдрова эмоционального выгорания и повышения стрессоустойчивости личности
Программа коррекции синдрова эмоционального выгорания и повышения стрессоустойчивости личности Пирог Ленивец
Пирог Ленивец Учебный семинар «Формирование универсальных учебных действий на уроках в начальной школе»
Учебный семинар «Формирование универсальных учебных действий на уроках в начальной школе» Диалог о вредной привычке.
Диалог о вредной привычке. Права та обовязки споживачів
Права та обовязки споживачів Mother teresa
Mother teresa Удаление третьих моляров верхней и нижней челюсти. Ретенция и дистопия зубов мудрости
Удаление третьих моляров верхней и нижней челюсти. Ретенция и дистопия зубов мудрости Мыс өндіріс қалдықтарынан түсті металл тұздарын алуды жобалау
Мыс өндіріс қалдықтарынан түсті металл тұздарын алуды жобалау Персональное предложение по регистрации товарного знака Баранкино для ИП (ООО) Под ключ
Персональное предложение по регистрации товарного знака Баранкино для ИП (ООО) Под ключ Семь дней недели
Семь дней недели