МОСКОВСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ(ГУ)Факультет управления и прикладной математикиКафедра «Математическое моделирование с
- МОСКОВСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ(ГУ)Факультет управления и прикладной математикиКафедра «Математическое моделирование с

Содержание
- 2. Цель исследований Проанализировать существующие математические модели транспортных потоков. Разработать математическую модель движения по многополосной дороге. Разработать
- 3. Наиболее популярные микроскопические транспортные модели. Модель оптимальной скорости Ньюэлла Модель следования за лидером Дженерал Моторс Модель
- 4. Модель «разумного водителя» Трайбера
- 5. Параметры модели
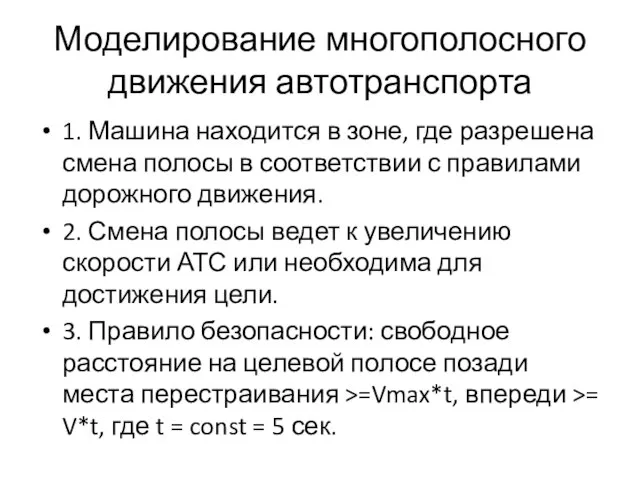
- 6. Моделирование многополосного движения автотранспорта 1. Машина находится в зоне, где разрешена смена полосы в соответствии с
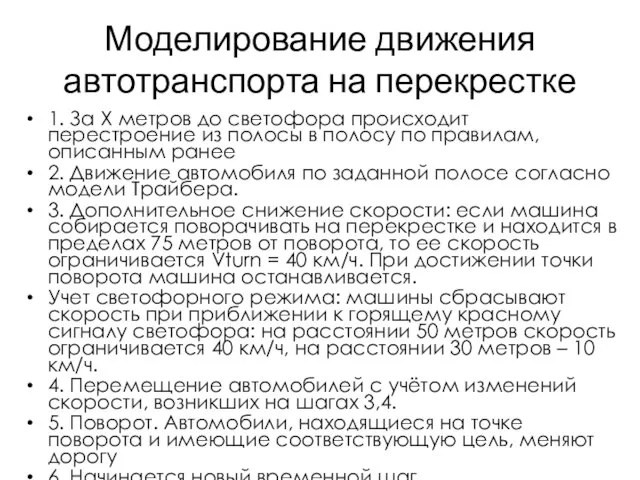
- 7. Моделирование движения автотранспорта на перекрестке 1. За Х метров до светофора происходит перестроение из полосы в
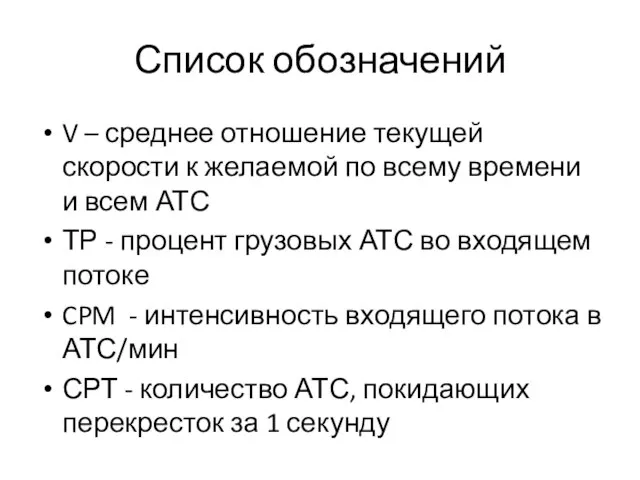
- 8. Список обозначений V – среднее отношение текущей скорости к желаемой по всему времени и всем АТС
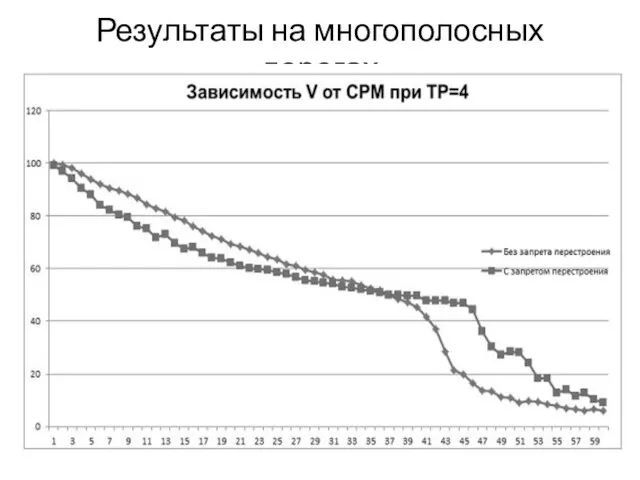
- 9. Результаты на многополосных дорогах
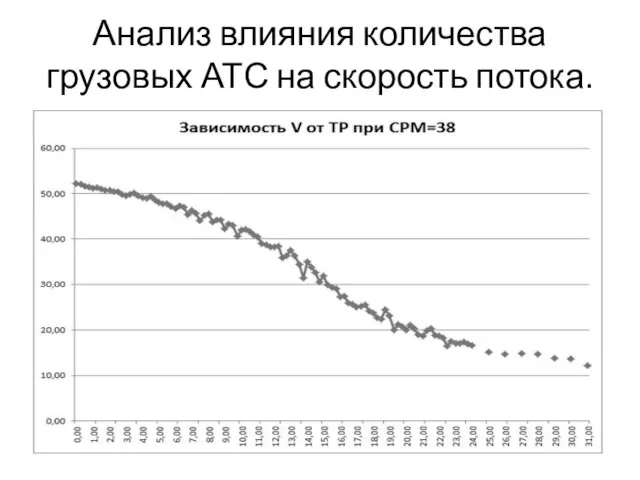
- 10. Анализ влияния количества грузовых АТС на скорость потока.
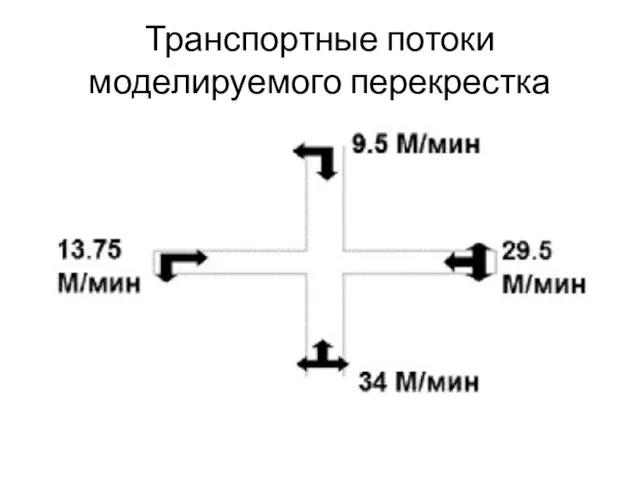
- 11. Транспортные потоки моделируемого перекрестка
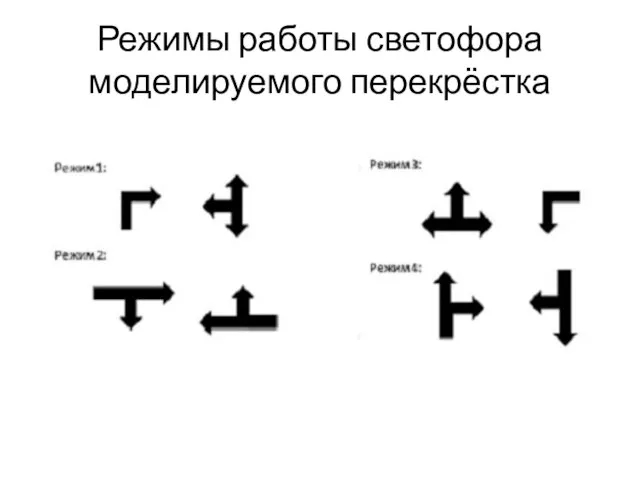
- 12. Режимы работы светофора моделируемого перекрёстка
- 13. Исследование пропускной способности перекрёстка в зависимости от длительности фаз светофора Длина дороги – 2000 метров Расстояние
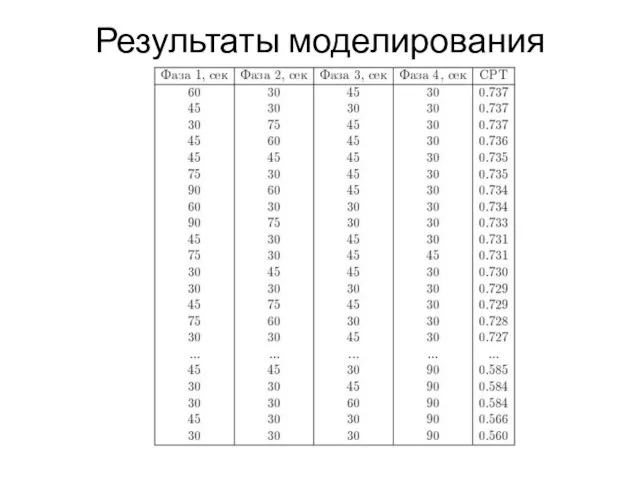
- 14. Результаты моделирования
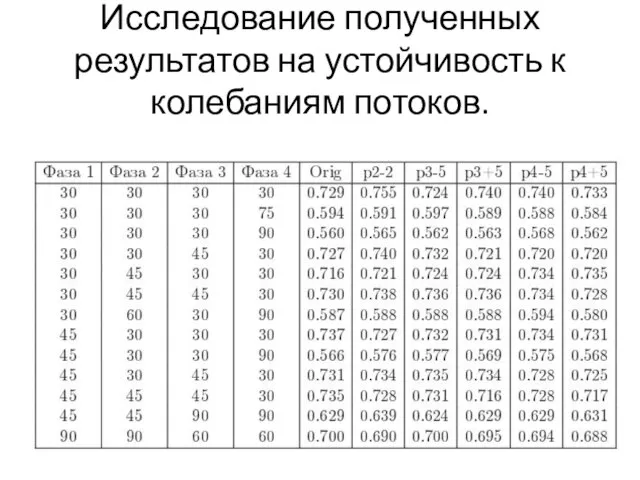
- 15. Исследование полученных результатов на устойчивость к колебаниям потоков.
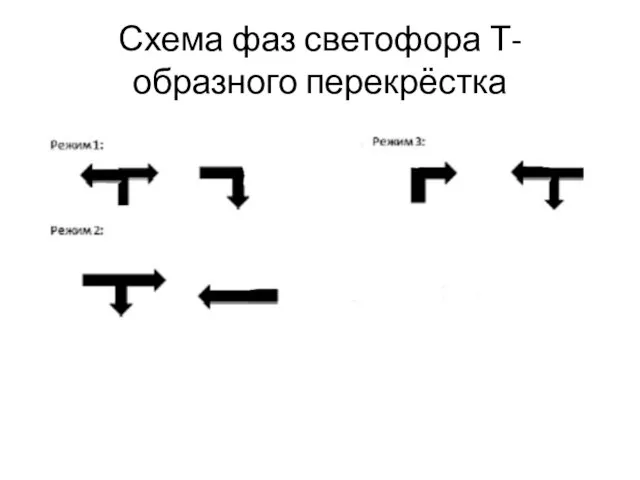
- 16. Схема фаз светофора Т-образного перекрёстка
- 17. Интенсивность в утренние часы
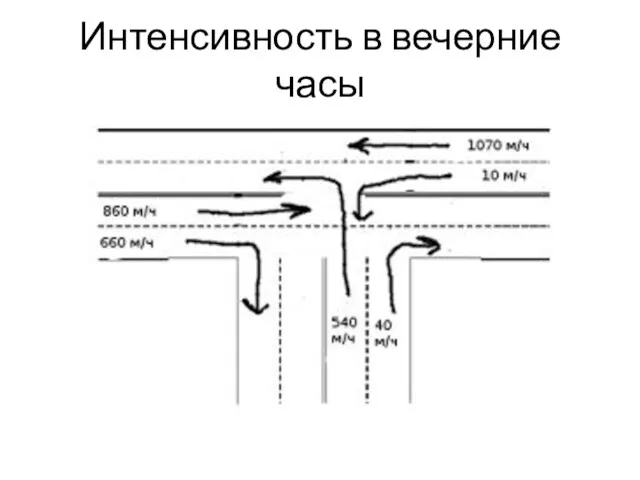
- 18. Интенсивность в вечерние часы
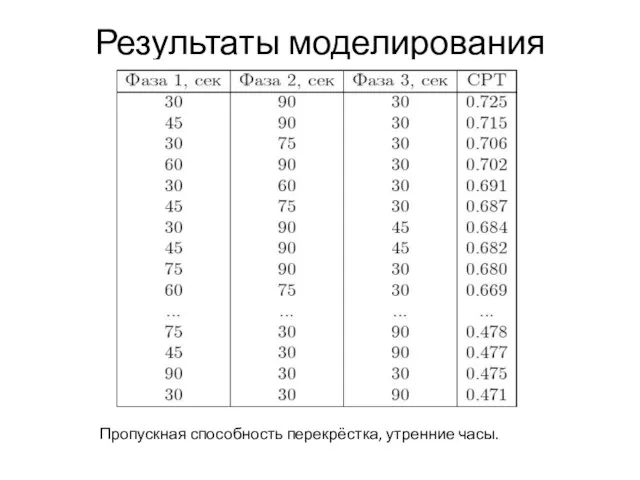
- 19. Результаты моделирования Пропускная способность перекрёстка, утренние часы.
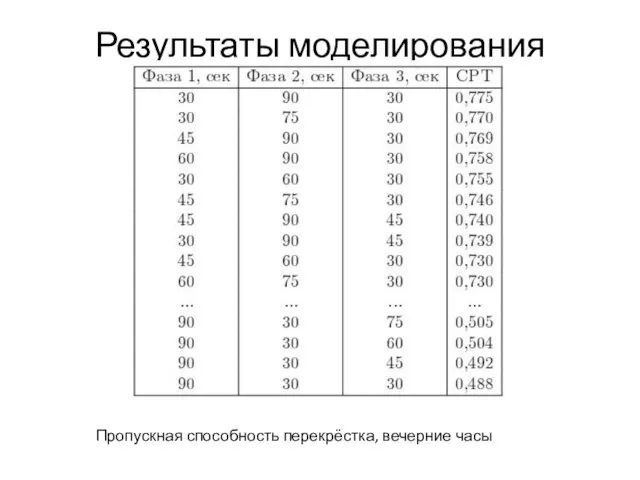
- 20. Результаты моделирования Пропускная способность перекрёстка, вечерние часы
- 21. Построена модель транспортной системы обобщающая существующую модель “разумного водителя” Трайбера Введены добавочные характеристики автомобилей, например, параметр
- 23. Скачать презентацию
Слайд 2Цель исследований
Проанализировать существующие математические модели транспортных потоков.
Разработать математическую модель движения по многополосной
Цель исследований
Проанализировать существующие математические модели транспортных потоков.
Разработать математическую модель движения по многополосной
Слайд 3Наиболее популярные микроскопические транспортные модели.
Модель оптимальной скорости Ньюэлла
Модель следования за лидером
Наиболее популярные микроскопические транспортные модели.
Модель оптимальной скорости Ньюэлла
Модель следования за лидером
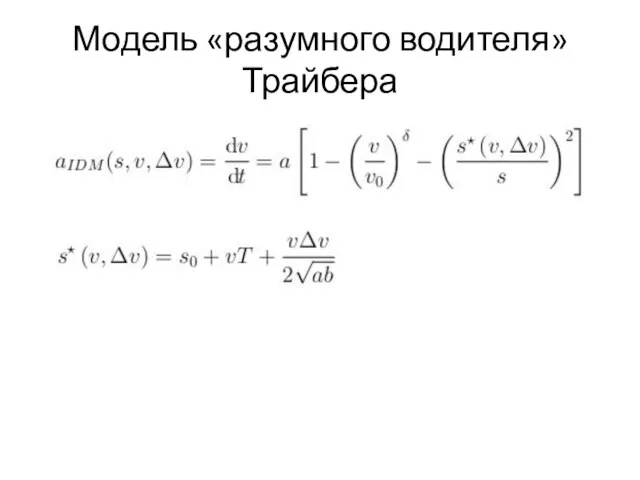
Слайд 4Модель «разумного водителя» Трайбера
Модель «разумного водителя» Трайбера
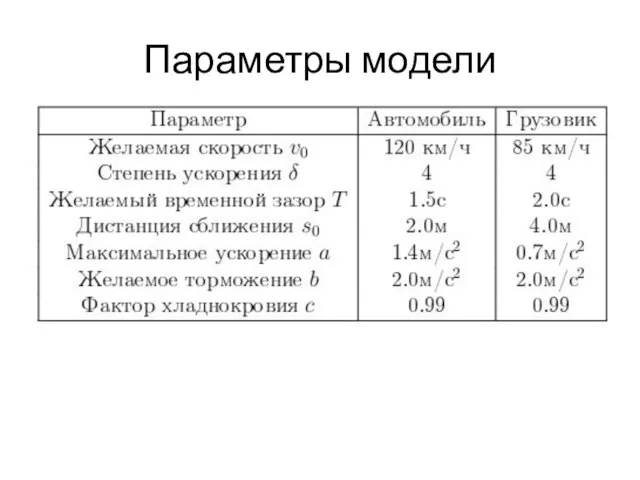
Слайд 5Параметры модели
Параметры модели
Слайд 6Моделирование многополосного движения автотранспорта
1. Машина находится в зоне, где разрешена смена полосы
Моделирование многополосного движения автотранспорта
1. Машина находится в зоне, где разрешена смена полосы
Слайд 7Моделирование движения автотранспорта на перекрестке
1. За Х метров до светофора происходит перестроение
Моделирование движения автотранспорта на перекрестке
1. За Х метров до светофора происходит перестроение
Слайд 8Список обозначений
V – среднее отношение текущей скорости к желаемой по всему времени
Список обозначений
V – среднее отношение текущей скорости к желаемой по всему времени
Слайд 9Результаты на многополосных дорогах
Результаты на многополосных дорогах
Слайд 10Анализ влияния количества грузовых АТС на скорость потока.
Анализ влияния количества грузовых АТС на скорость потока.
Слайд 11Транспортные потоки моделируемого перекрестка
Транспортные потоки моделируемого перекрестка
Слайд 12Режимы работы светофора моделируемого перекрёстка
Режимы работы светофора моделируемого перекрёстка
Слайд 13Исследование пропускной способности перекрёстка в зависимости от длительности фаз светофора
Длина дороги –
Исследование пропускной способности перекрёстка в зависимости от длительности фаз светофора
Длина дороги –
Слайд 14Результаты моделирования
Результаты моделирования
Слайд 15Исследование полученных результатов на устойчивость к колебаниям потоков.
Исследование полученных результатов на устойчивость к колебаниям потоков.
Слайд 16Схема фаз светофора Т-образного перекрёстка
Схема фаз светофора Т-образного перекрёстка
Слайд 17Интенсивность в утренние часы
Интенсивность в утренние часы

Слайд 18Интенсивность в вечерние часы
Интенсивность в вечерние часы
Слайд 19Результаты моделирования
Пропускная способность перекрёстка, утренние часы.
Результаты моделирования
Пропускная способность перекрёстка, утренние часы.
Слайд 20Результаты моделирования
Пропускная способность перекрёстка, вечерние часы
Результаты моделирования
Пропускная способность перекрёстка, вечерние часы
Слайд 21Построена модель транспортной системы обобщающая существующую модель “разумного водителя” Трайбера
Введены добавочные характеристики
Построена модель транспортной системы обобщающая существующую модель “разумного водителя” Трайбера
Введены добавочные характеристики
 Данте Алигьери "Божественная комедия"
Данте Алигьери "Божественная комедия" Цикл уроков по разделу Антарктида
Цикл уроков по разделу Антарктида Расчет показателей парка подвижного состава
Расчет показателей парка подвижного состава Построение и редактирование геометрических объектов
Построение и редактирование геометрических объектов Чуковский Корней Иванович 1882-1969
Чуковский Корней Иванович 1882-1969 Методы финансовой оценки при M&A сделках на примере DCF (Discounted Cash Flow) анализа
Методы финансовой оценки при M&A сделках на примере DCF (Discounted Cash Flow) анализа ООО "Продсервис" зарегистрированный 2009 г, ранее ООО "Гейдельбер Медиа" один из крупнейших франчайзинг Subway в Москве. На сегодняшний д
ООО "Продсервис" зарегистрированный 2009 г, ранее ООО "Гейдельбер Медиа" один из крупнейших франчайзинг Subway в Москве. На сегодняшний д Круглый стол «Современные международные стандарты в области информационных технологий для учителей»
Круглый стол «Современные международные стандарты в области информационных технологий для учителей» Macroeconomic Models
Macroeconomic Models Виды пейзажа
Виды пейзажа Образование почви их разнообразие
Образование почви их разнообразие Организация книжных выставок - это наука или искусство!?
Организация книжных выставок - это наука или искусство!? Проверка наличия аффилированности между выбранными компаниями, участвующими в программе поставок питания
Проверка наличия аффилированности между выбранными компаниями, участвующими в программе поставок питания Россия рубежа XIX - XX веков
Россия рубежа XIX - XX веков Подгузники Kidy
Подгузники Kidy Птицы. Изображение и реальность
Птицы. Изображение и реальность Учебная практика
Учебная практика Религия Шаманизм
Религия Шаманизм Игры у ёлки
Игры у ёлки Фристайл
Фристайл Сочетаемость цветов
Сочетаемость цветов Antiwar Protests of the 1960’s and 1970’s
Antiwar Protests of the 1960’s and 1970’s Природное наследие родного края
Природное наследие родного края Методология научного исследования
Методология научного исследования  Basic Refrigeration System
Basic Refrigeration System  Electronic Sports League
Electronic Sports League Психологическое здоровье детей младшего школьного возраста
Психологическое здоровье детей младшего школьного возраста Плетение салфеток на раме
Плетение салфеток на раме