- МСС АЦП напряжение-код

Содержание
- 2. Термин АЦП формально применим к измерительным преобразователям любых аналоговых физических величин в цифровой код. Однако чаще
- 3. Основные характеристики АЦП "напряжение-код". 1. Диапазон измерения. Современные АЦП в интегральном и модульном исполнении могут быть
- 4. 2. Разрешающая способность. Эту характеристику определяют несколькими способами: 2.1. шагом квантования (ценой единицы младшего разряда) ;
- 5. Эти параметры связаны следующими простыми формулами: N=2n-1 , N=10k , Δ0=Uмакс / N Следует различать термин
- 6. 3. Погрешность. Принципиальная составляющая погрешности любого АЦП – погрешность квантования. В зависимости от способа построения шкалы
- 7. Нормируемая суммарная погрешность (раздел 1) реальных АЦП, в которую вносят вклад составляющие погрешностей отдельных узлов и
- 8. 4. Быстродействие (Б) – количество измерений в секунду (изм/с), выполняемых с нормируемой погрешностью (зарубежные фирмы при
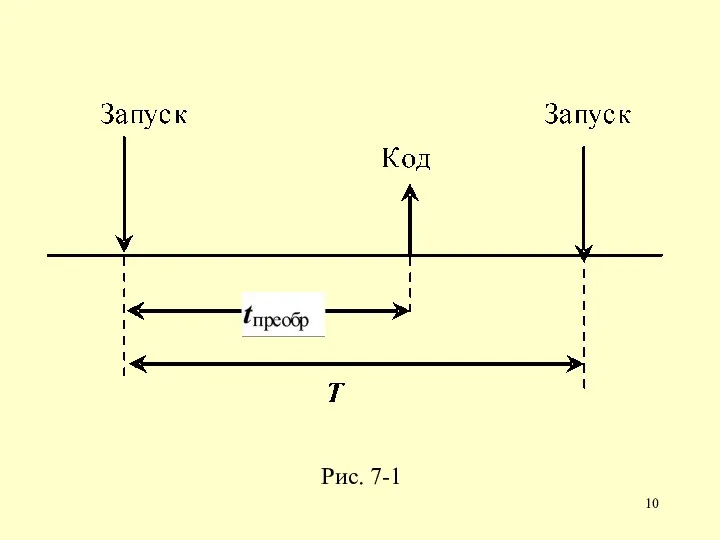
- 9. 5. Время преобразования (tпр) – интервал времени от момента подачи импульса запуска до момента выдачи кода
- 10. Рис. 7-1
- 11. 6. Помехоустойчивость (П). Наиболее часто этот термин используют для оценки способности АЦП, предназначенных для измерения постоянного
- 12. Типы АЦП. 1.Время – импульсные АЦП. Исторически это самый первый практически реализованный тип преобразователей «напряжение код».
- 13. Нетрудно понять, что быстродействие таких АЦП принципиально ограничено, а время преобразования не постоянно. Разрешающая способность может
- 14. 2.Частотно-импульсные АЦП. Принцип действия ЧИ АЦП основан на формировании последовательности импульсов, частота следования которых пропорциональна измеряемому
- 15. Поскольку накопление импульсов в счетчике эквивалентно операции интегрирования входного напряжения, можно создать помехоустойчивый АЦП если время
- 16. 3.Кодо-импульсные АЦП. Принцип работы КИ АЦП основан на применении устройств, выполняющих обратную операцию – операцию преобразование
- 17. Эта идея многократно обыграна в детективной литературе и кинематографе – подбор злоумышленником кода к сейфу. КИ
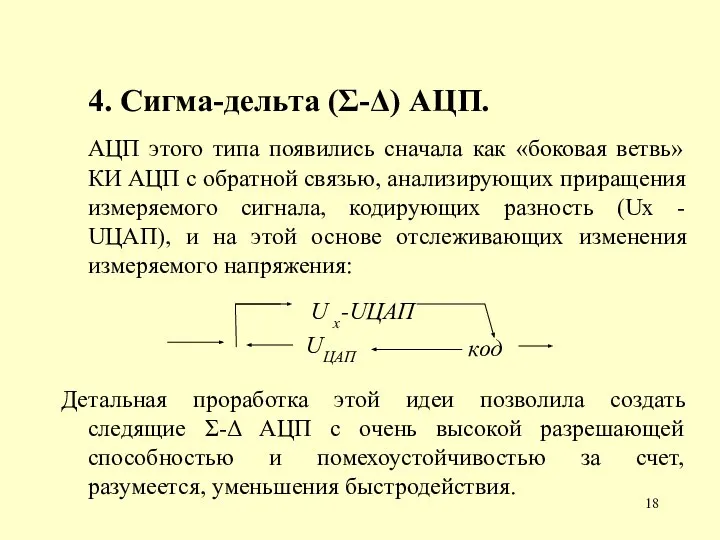
- 18. 4. Сигма-дельта (Σ-Δ) АЦП. АЦП этого типа появились сначала как «боковая ветвь» КИ АЦП с обратной
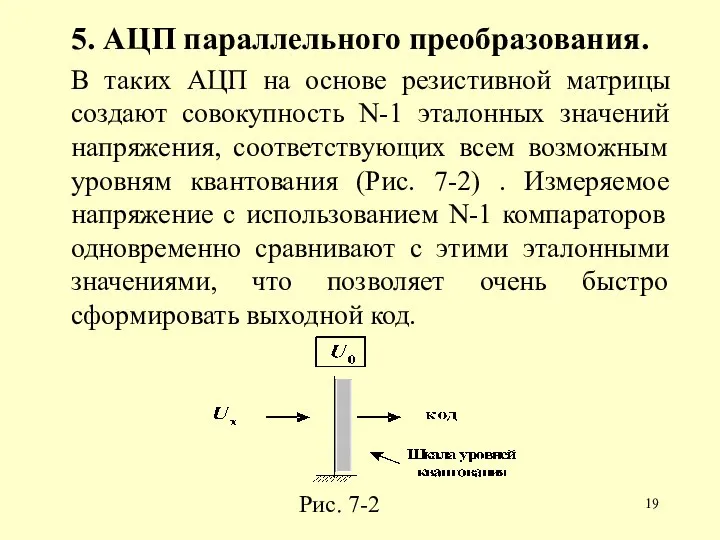
- 19. 5. АЦП параллельного преобразования. В таких АЦП на основе резистивной матрицы создают совокупность N-1 эталонных значений
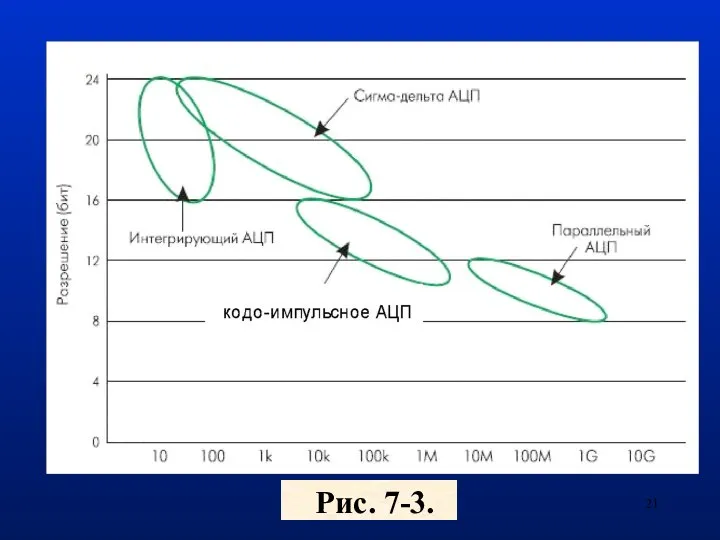
- 20. Быстродействие таких АЦП может достигать нескольких миллиардов измерений в секунду, однако их разрешающая способность ограничена технологическими
- 21. Рис. 7-3.
- 22. ВИ АЦП однотактного интегрирования. Исторически это первый практически реализованный и самый несложный по конструкции тип АЦП,
- 23. Рис. 7-4 ОГ ВС ДДС УУ ИОН Инт. СУ Запуск стоп Код Т 0 U X
- 24. Условные обозначения на этой схеме: ОГ – опорный генератор, ВС – временной селектор, ДДС – двоично-десятичный
- 25. Запуск АЦП Nx 2 3 4 5 1 Временные диаграммы работы АЦП представлены на рис. 7-5.
- 26. После прихода импульса запуска АЦП устройство управления УУ выдает команду на формирование пилообразного напряжения интегратором Инт,
- 27. Таким образом, показания АЦП определяются «мгновенным» значением измеряемого напряжения в момент срабатывания компаратора. Интересно заметить, что
- 28. Характеристики ВИ АЦП однотактного интегрирования: 1.Диапазон измерения определяется размахом пилообразного напряжения, т.е. значением U0 , 2.Разрешающая
- 29. 3. Погрешность определяется, как правило, не погрешностью кантования, а свойствами отдельных элементов его схемы: опорного генератора,
- 30. 4.Быстродействие Б=1/Т таких АЦП можно менять в достаточно широких пределах – от одного измерения в несколько
- 31. ВИ АЦП двухтактного интегрирования. Долгое время это был самый точный и помехоустойчивый тип АЦП для точных
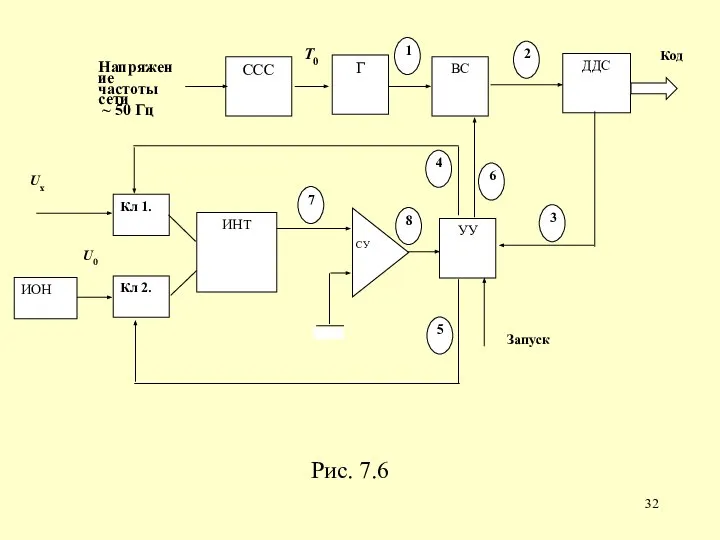
- 32. Рис. 7.6
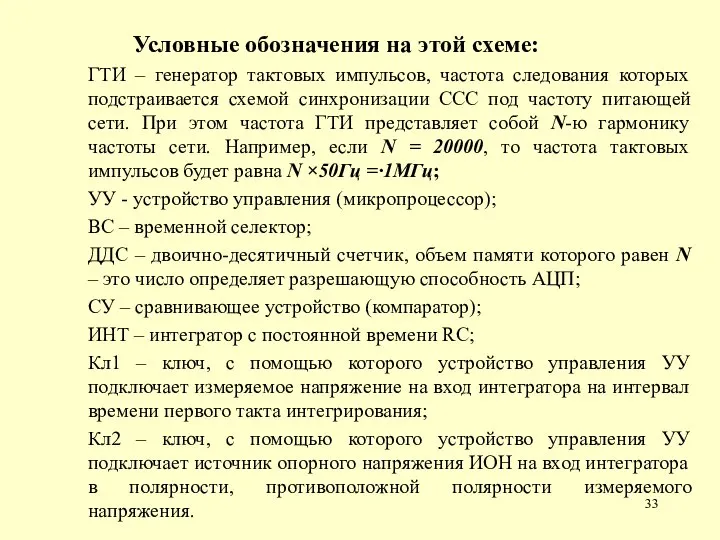
- 33. Условные обозначения на этой схеме: ГТИ – генератор тактовых импульсов, частота следования которых подстраивается схемой синхронизации
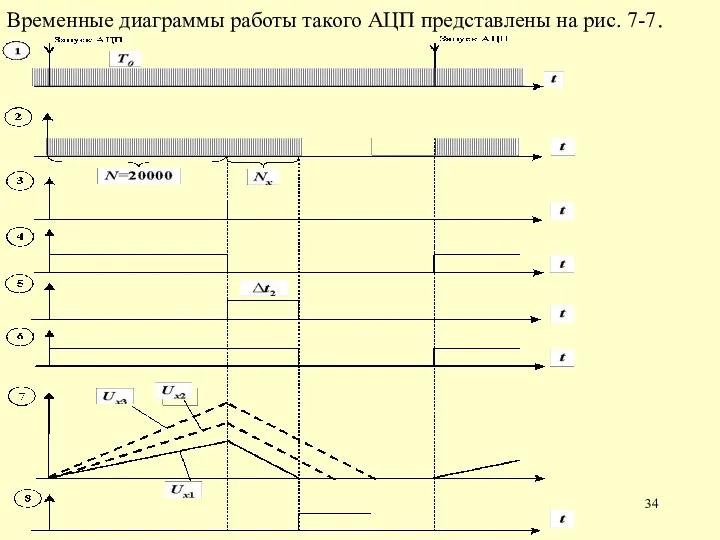
- 34. Временные диаграммы работы такого АЦП представлены на рис. 7-7.
- 35. Цикл работы этой упрощенной схемы разбит на 2 этапа. На первом этапе УУ включает ключ 1
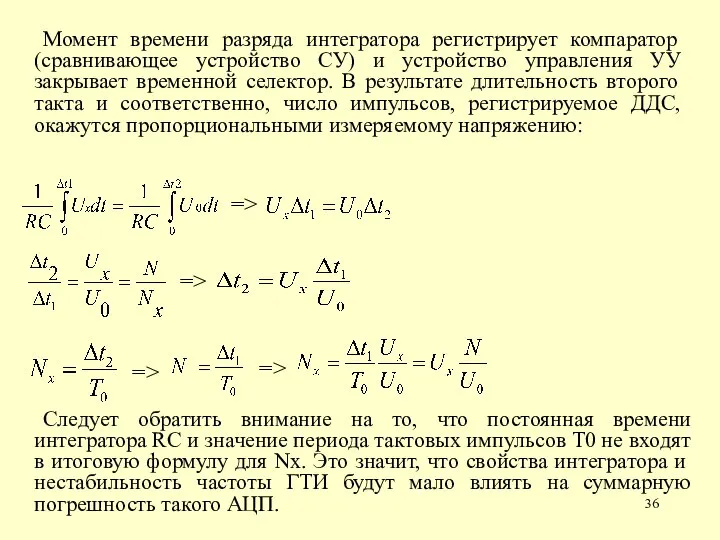
- 36. Момент времени разряда интегратора регистрирует компаратор (сравнивающее устройство СУ) и устройство управления УУ закрывает временной селектор.
- 37. Характеристики ВИ АЦП ДИ: Диапазон измерения определяется напряжением ИОН U0. Разрешающая способность определяется числом N -
- 38. Погрешность определяется погрешностью кантования и погрешностями отдельных элементов схемы: источника опорного напряжения ИОН, компаратора (соответствующая погрешность
- 39. Быстродействие принципиально ограничено и не может быть выше значения Б = 1/(2Δt1) = 25 изм/с. Однако
- 40. Практические схемы АЦП ДИ значительно сложнее, чем схема рис. 7-7, в частности, обязательно вводится третий такт
- 41. Частотно – импульсные АЦП Это также достаточно точный и помехоустойчивый тип интегрирующего АЦП, который некоторое время
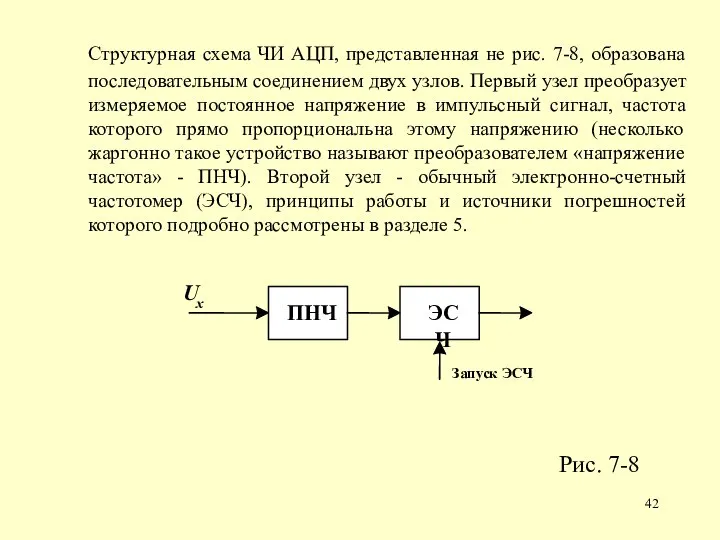
- 42. Структурная схема ЧИ АЦП, представленная не рис. 7-8, образована последовательным соединением двух узлов. Первый узел преобразует
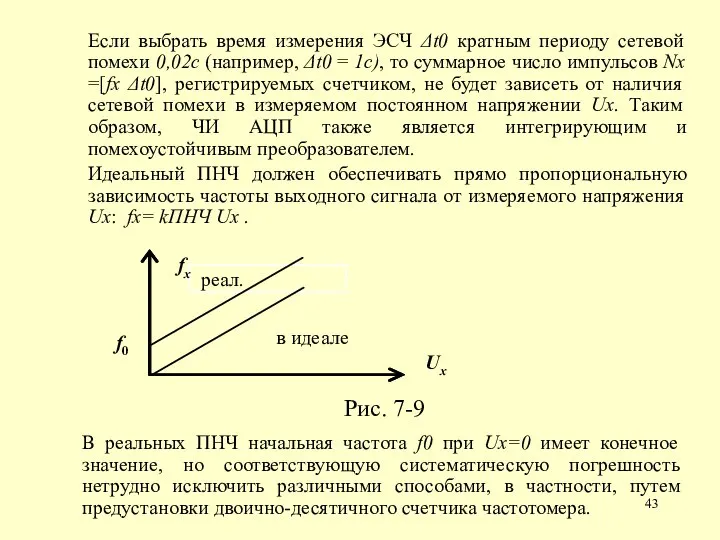
- 43. Если выбрать время измерения ЭСЧ Δt0 кратным периоду сетевой помехи 0,02с (например, Δt0 = 1с), то
- 44. Характеристики ЧИ АЦП: 1. Диапазон измерения U0 определяется свойствами преобразователя «напряжение – частота» (ПНЧ), в состав
- 45. 4. Быстродействие Б= 1/(Δt0+Δtподготовки) – как правило, его выбирают не выше одного измерения в секунду. 5.
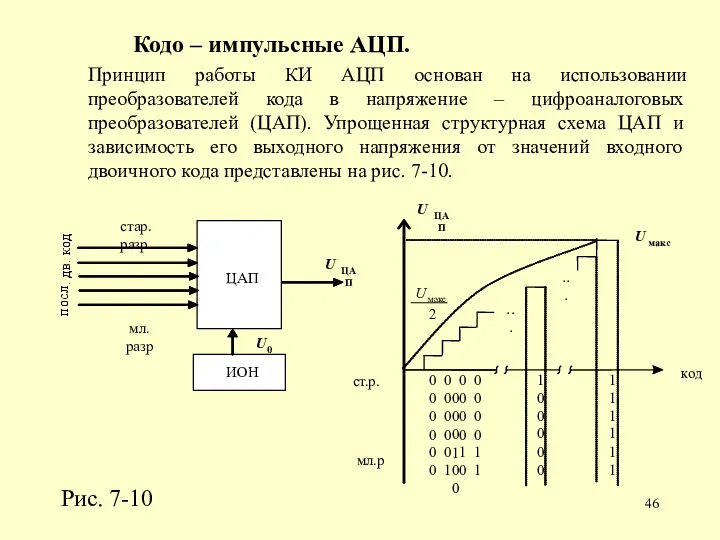
- 46. Кодо – импульсные АЦП. Принцип работы КИ АЦП основан на использовании преобразователей кода в напряжение –
- 47. В исходном состоянии, при подаче кода «все нули» выходное напряжение ЦАП UЦАП устанавливают равным половине цены
- 48. Характеристики ЦАП: 1.Диапазон определяется напряжением ИОН U0, 2.Разрешающая способность – числом разрядов n двоичного кода, 3.Суммарная
- 49. 4.Время установления выходного напряжения tустЦАП. При скачкообразном изменении входного кода напряжение ЦАП изменяется не мгновенно, а
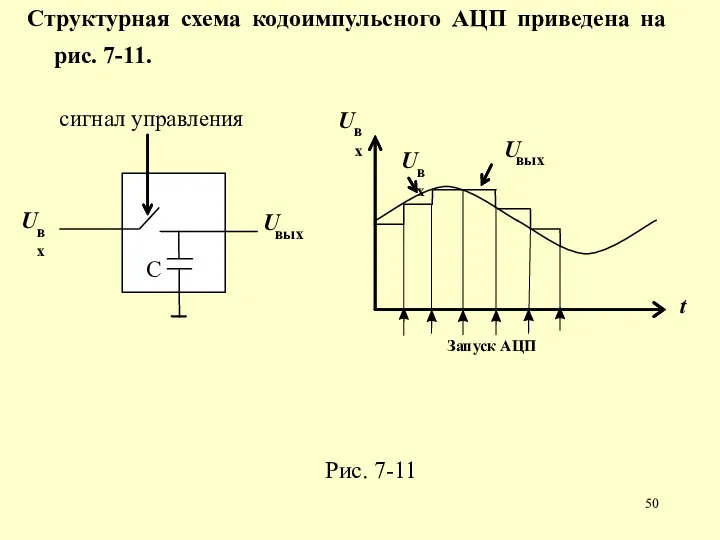
- 50. Структурная схема кодоимпульсного АЦП приведена на рис. 7-11. Рис. 7-11
- 51. Условные обозначения: УВХ – устройство «выборки–хранения», ГТИ – генератор тактовых импульсов, СУ – сравнивающее устройство (компаратор),
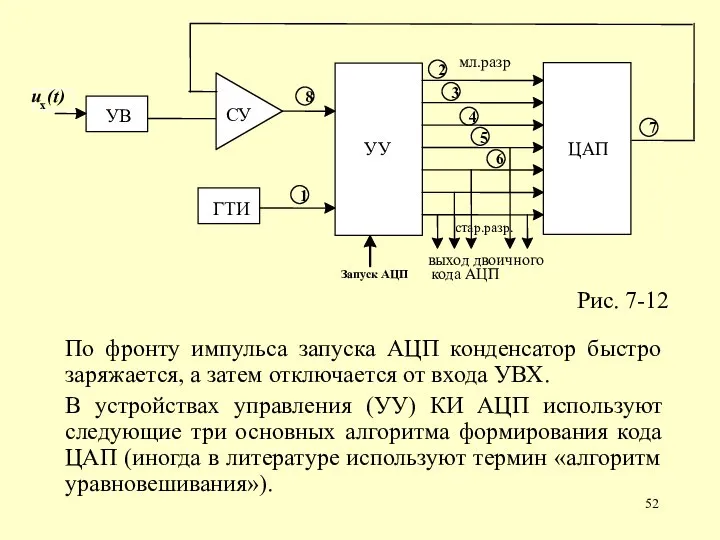
- 52. Рис. 7-12 По фронту импульса запуска АЦП конденсатор быстро заряжается, а затем отключается от входа УВХ.
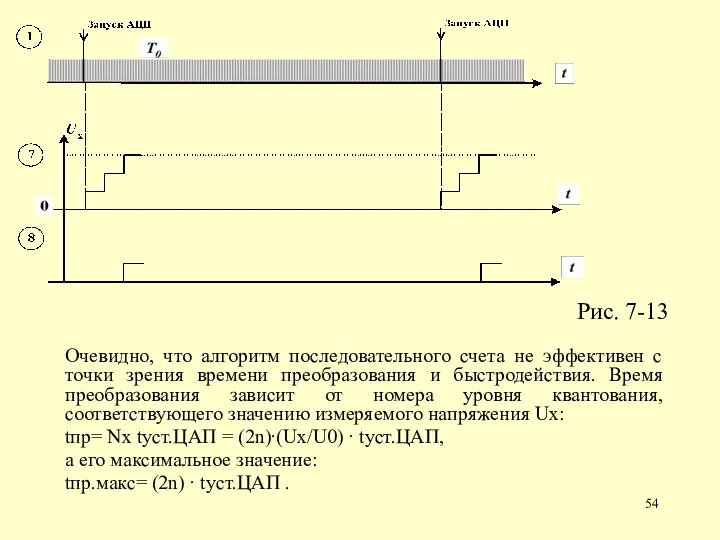
- 53. 1. Алгоритм последовательного счета. Для реализации алгоритма последовательного счета в устройстве управления используют обычный двоичный счетчик.
- 54. Рис. 7-13 Очевидно, что алгоритм последовательного счета не эффективен с точки зрения времени преобразования и быстродействия.
- 55. Соответственно, быстродействие КИ АЦП при использовании алгоритма последовательного счета получается относительно невысоким: Б=1/tпр =1/ [(2n+1) ∙tуст.ЦАП]
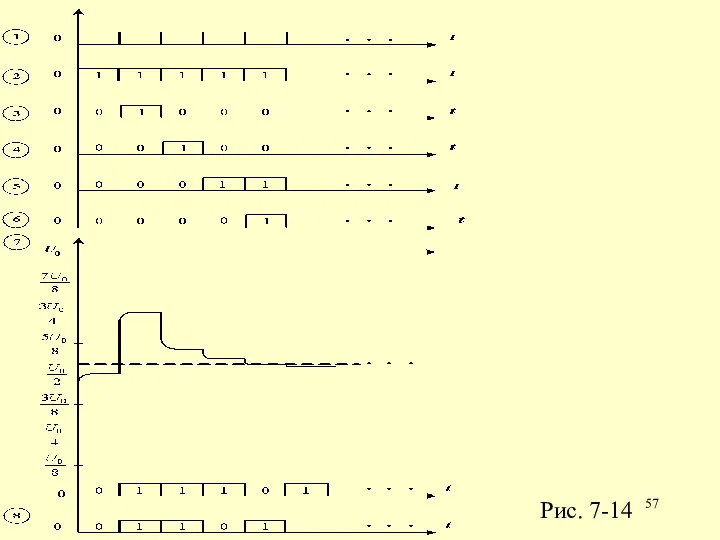
- 56. 2. Алгоритм поразрядного уравновешивания (иногда его называют алгоритмом «последовательного приближения») позволяет существенным образом повысить быстродействие КИ
- 57. Рис. 7-14
- 58. При таком коде выходное напряжение ЦАП устанавливается равным половине диапазона измерения. Если компаратор (СУ) обнаруживает, что
- 59. Следует, однако, иметь ввиду, что время установления напряжения ЦАП tуст.ЦАП - величина не постоянная и зависит
- 60. Характеристики КИ АЦП, использующих два рассмотренных выше алгоритмов уравновешивания: 1.Диапазон измерения определяется источником опорного напряжения ЦАП
- 61. 4.Время преобразования tпр и 5.Быстродействие Б зависят от используемого алгоритма уравновешивания (формулы приведены выше). Например, недорогой
- 62. 3. Алгоритм следящего уравновешивания Принципиальное отличие этого алгоритма работы КИ АЦП от двух рассмотренных выше состоит
- 63. Сигма-дельта АЦП Сигма- дельта (Σ-Δ) АЦП кодируют не непосредственно измеряемый сигнал Uх, а разность (Uх -
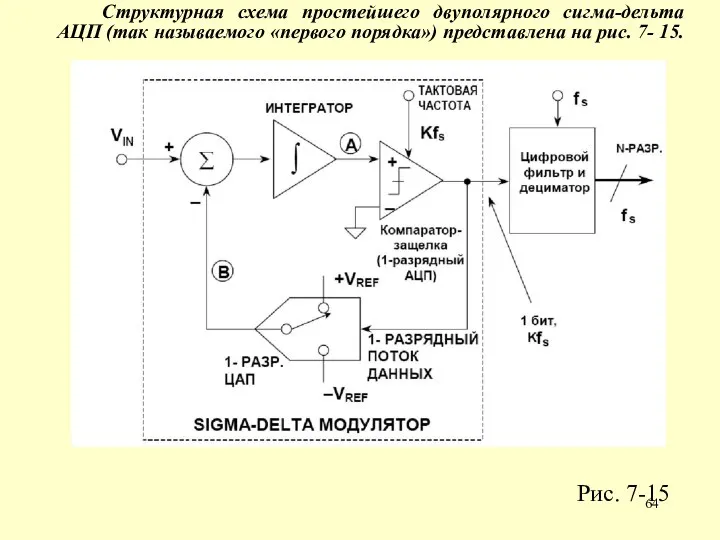
- 64. Структурная схема простейшего двуполярного сигма-дельта АЦП (так называемого «первого порядка») представлена на рис. 7- 15. Рис.
- 65. Элементы схемы: Σ – сумматор, который выполняет функцию вычитания, поскольку один из его входов - инвертирующий,
- 66. Не вдаваясь в детали, работу ΣΔ АЦП можно описать следующим образом. Представим, что измеряемое положительное постоянное
- 67. Точно так же, когда значение сигнала приближается к отрицательному значению – VREF, число единиц в последовательном
- 68. АЦП параллельного преобразования Это самый быстродействующий из ныне существующих типов АЦП. Его структурная схема приведена на
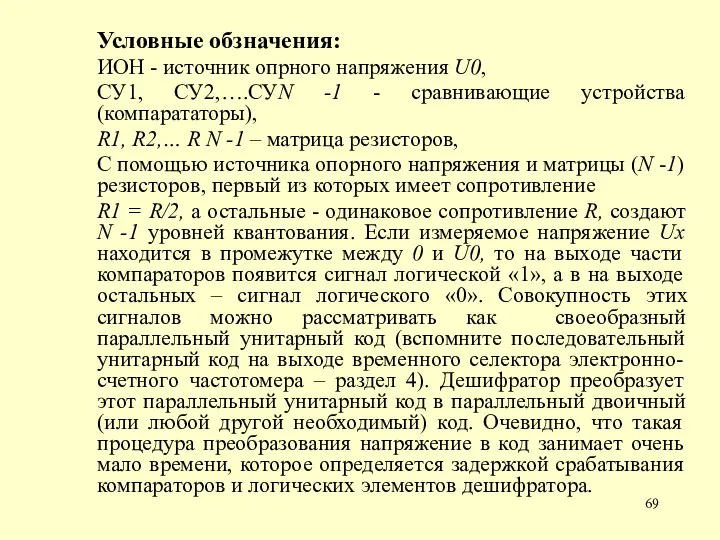
- 69. Условные обзначения: ИОН - источник опрного напряжения U0, СУ1, СУ2,….СУN -1 - сравнивающие устройства (компарататоры), R1,
- 70. Характеристики параллельных АЦП: 1. Диапазон измерения Uмакс определяется напряжением ИОН U0. 2. Разрешающая способность N= 2n
- 71. Схемы реальных интегральных и модульных АЦП различных типов значительно сложнее, чем рассмотренные выше. В частности, в
- 72. Автоматизация измерений Для комплексного использования измерительных приборов и преобразователей, программного управления их работой в составе измерительных
- 74. Скачать презентацию
Слайд 2Термин АЦП формально применим к измерительным преобразователям любых аналоговых физических величин в
Термин АЦП формально применим к измерительным преобразователям любых аналоговых физических величин в
Слайд 3 Основные характеристики АЦП "напряжение-код".
1. Диапазон измерения.
Современные АЦП в интегральном и модульном
Основные характеристики АЦП "напряжение-код".
1. Диапазон измерения.
Современные АЦП в интегральном и модульном
Слайд 4 2. Разрешающая способность.
Эту характеристику определяют несколькими способами:
2.1. шагом квантования (ценой единицы младшего
2. Разрешающая способность.
Эту характеристику определяют несколькими способами:
2.1. шагом квантования (ценой единицы младшего
Слайд 5 Эти параметры связаны следующими простыми формулами:
N=2n-1 , N=10k , Δ0=Uмакс / N
Следует
Эти параметры связаны следующими простыми формулами:
N=2n-1 , N=10k , Δ0=Uмакс / N
Следует
Слайд 6 3. Погрешность.
Принципиальная составляющая погрешности любого АЦП – погрешность квантования. В зависимости
3. Погрешность.
Принципиальная составляющая погрешности любого АЦП – погрешность квантования. В зависимости
Слайд 7 Нормируемая суммарная погрешность (раздел 1) реальных АЦП, в которую вносят вклад составляющие
Нормируемая суммарная погрешность (раздел 1) реальных АЦП, в которую вносят вклад составляющие
Слайд 8 4. Быстродействие (Б) – количество измерений в секунду (изм/с), выполняемых с нормируемой
4. Быстродействие (Б) – количество измерений в секунду (изм/с), выполняемых с нормируемой
Слайд 9 5. Время преобразования (tпр) – интервал времени от момента подачи импульса запуска
5. Время преобразования (tпр) – интервал времени от момента подачи импульса запуска
Слайд 10
Рис. 7-1
Рис. 7-1
Слайд 11 6. Помехоустойчивость (П).
Наиболее часто этот термин используют для оценки способности АЦП, предназначенных
6. Помехоустойчивость (П).
Наиболее часто этот термин используют для оценки способности АЦП, предназначенных
Слайд 12 Типы АЦП.
1.Время – импульсные АЦП.
Исторически это самый первый практически реализованный тип преобразователей
Типы АЦП.
1.Время – импульсные АЦП.
Исторически это самый первый практически реализованный тип преобразователей
Слайд 13 Нетрудно понять, что быстродействие таких АЦП принципиально ограничено, а время преобразования не
Нетрудно понять, что быстродействие таких АЦП принципиально ограничено, а время преобразования не
Слайд 14 2.Частотно-импульсные АЦП.
Принцип действия ЧИ АЦП основан на формировании последовательности импульсов, частота следования
2.Частотно-импульсные АЦП.
Принцип действия ЧИ АЦП основан на формировании последовательности импульсов, частота следования
Слайд 15 Поскольку накопление импульсов в счетчике эквивалентно операции интегрирования входного напряжения, можно создать
Поскольку накопление импульсов в счетчике эквивалентно операции интегрирования входного напряжения, можно создать
Слайд 16 3.Кодо-импульсные АЦП.
Принцип работы КИ АЦП основан на применении устройств, выполняющих обратную операцию
3.Кодо-импульсные АЦП.
Принцип работы КИ АЦП основан на применении устройств, выполняющих обратную операцию
Слайд 17 Эта идея многократно обыграна в детективной литературе и кинематографе – подбор злоумышленником
Эта идея многократно обыграна в детективной литературе и кинематографе – подбор злоумышленником
Слайд 18 4. Сигма-дельта (Σ-Δ) АЦП.
АЦП этого типа появились сначала как «боковая ветвь» КИ
4. Сигма-дельта (Σ-Δ) АЦП.
АЦП этого типа появились сначала как «боковая ветвь» КИ
Слайд 19 5. АЦП параллельного преобразования.
В таких АЦП на основе резистивной матрицы создают совокупность
5. АЦП параллельного преобразования.
В таких АЦП на основе резистивной матрицы создают совокупность
Слайд 20 Быстродействие таких АЦП может достигать нескольких миллиардов измерений в секунду, однако их
Быстродействие таких АЦП может достигать нескольких миллиардов измерений в секунду, однако их
Слайд 21Рис. 7-3.
Рис. 7-3.
Слайд 22ВИ АЦП однотактного интегрирования.
Исторически это первый практически реализованный и самый несложный по
ВИ АЦП однотактного интегрирования.
Исторически это первый практически реализованный и самый несложный по
Слайд 23Рис. 7-4
ОГ
ВС
ДДС
УУ
ИОН
Инт.
СУ
Запуск
стоп
Код
Т
0
U
X
U
0
1
2
4
3
5
1
Рис. 7-4
ОГ
ВС
ДДС
УУ
ИОН
Инт.
СУ
Запуск
стоп
Код
Т
0
U
X
U
0
1
2
4
3
5
1
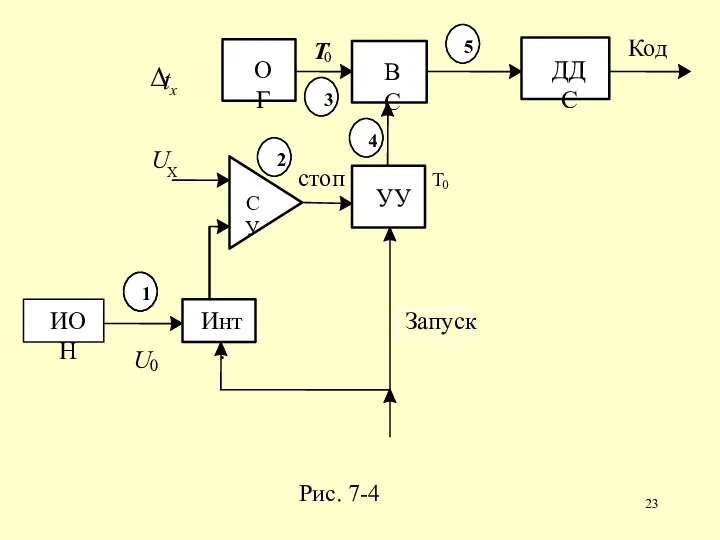
Слайд 24 Условные обозначения на этой схеме:
ОГ – опорный генератор,
ВС – временной селектор,
ДДС –
Условные обозначения на этой схеме:
ОГ – опорный генератор,
ВС – временной селектор,
ДДС –
Слайд 25Запуск АЦП
Nx
2
3
4
5
1
Временные диаграммы работы АЦП представлены на рис. 7-5.
Запуск АЦП
Nx
2
3
4
5
1
Временные диаграммы работы АЦП представлены на рис. 7-5.
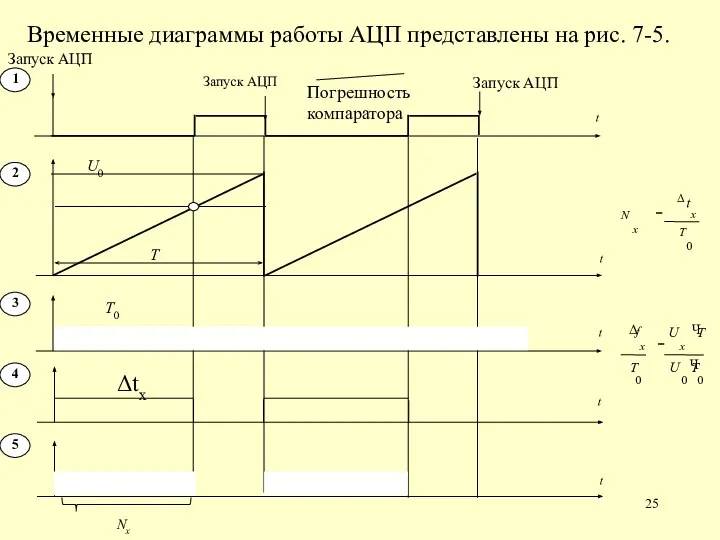
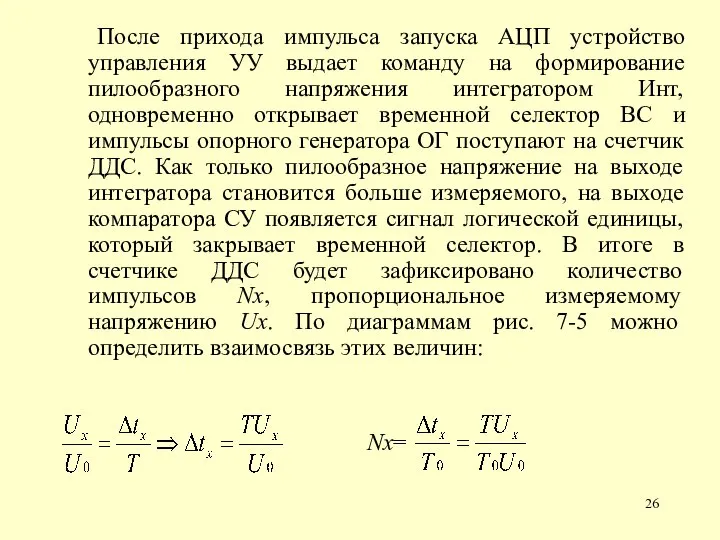
Слайд 26 После прихода импульса запуска АЦП устройство управления УУ выдает команду на формирование
После прихода импульса запуска АЦП устройство управления УУ выдает команду на формирование
Слайд 27 Таким образом, показания АЦП определяются «мгновенным» значением измеряемого напряжения в момент срабатывания
Таким образом, показания АЦП определяются «мгновенным» значением измеряемого напряжения в момент срабатывания
Слайд 28 Характеристики ВИ АЦП однотактного интегрирования:
1.Диапазон измерения определяется размахом пилообразного напряжения, т.е. значением
Характеристики ВИ АЦП однотактного интегрирования:
1.Диапазон измерения определяется размахом пилообразного напряжения, т.е. значением
Слайд 29 3. Погрешность определяется, как правило, не погрешностью кантования, а свойствами отдельных элементов
3. Погрешность определяется, как правило, не погрешностью кантования, а свойствами отдельных элементов
Слайд 30 4.Быстродействие Б=1/Т таких АЦП можно менять в достаточно широких пределах – от
4.Быстродействие Б=1/Т таких АЦП можно менять в достаточно широких пределах – от
Слайд 31 ВИ АЦП двухтактного интегрирования.
Долгое время это был самый точный и помехоустойчивый тип
ВИ АЦП двухтактного интегрирования.
Долгое время это был самый точный и помехоустойчивый тип
Слайд 32Рис. 7.6
Рис. 7.6
Слайд 33 Условные обозначения на этой схеме:
ГТИ – генератор тактовых импульсов, частота следования которых
Условные обозначения на этой схеме:
ГТИ – генератор тактовых импульсов, частота следования которых
Слайд 34Временные диаграммы работы такого АЦП представлены на рис. 7-7.
Временные диаграммы работы такого АЦП представлены на рис. 7-7.
Слайд 35 Цикл работы этой упрощенной схемы разбит на 2 этапа. На первом этапе
Цикл работы этой упрощенной схемы разбит на 2 этапа. На первом этапе
Слайд 36 Момент времени разряда интегратора регистрирует компаратор (сравнивающее устройство СУ) и устройство управления
Момент времени разряда интегратора регистрирует компаратор (сравнивающее устройство СУ) и устройство управления
Слайд 37 Характеристики ВИ АЦП ДИ:
Диапазон измерения определяется напряжением ИОН U0.
Разрешающая способность определяется числом
Характеристики ВИ АЦП ДИ:
Диапазон измерения определяется напряжением ИОН U0.
Разрешающая способность определяется числом
Слайд 38 Погрешность определяется погрешностью кантования и погрешностями отдельных элементов схемы:
источника опорного напряжения
Погрешность определяется погрешностью кантования и погрешностями отдельных элементов схемы:
источника опорного напряжения
Слайд 39 Быстродействие принципиально ограничено и не может быть выше значения Б = 1/(2Δt1)
Быстродействие принципиально ограничено и не может быть выше значения Б = 1/(2Δt1)
Слайд 40 Практические схемы АЦП ДИ значительно сложнее, чем схема рис. 7-7, в частности,
Практические схемы АЦП ДИ значительно сложнее, чем схема рис. 7-7, в частности,
Слайд 41 Частотно – импульсные АЦП
Это также достаточно точный и помехоустойчивый тип интегрирующего АЦП,
Частотно – импульсные АЦП
Это также достаточно точный и помехоустойчивый тип интегрирующего АЦП,
Слайд 42 Структурная схема ЧИ АЦП, представленная не рис. 7-8, образована последовательным соединением двух
Структурная схема ЧИ АЦП, представленная не рис. 7-8, образована последовательным соединением двух
Слайд 43 Если выбрать время измерения ЭСЧ Δt0 кратным периоду сетевой помехи 0,02с (например,
Если выбрать время измерения ЭСЧ Δt0 кратным периоду сетевой помехи 0,02с (например,
Слайд 44 Характеристики ЧИ АЦП:
1. Диапазон измерения U0 определяется свойствами преобразователя «напряжение – частота»
Характеристики ЧИ АЦП:
1. Диапазон измерения U0 определяется свойствами преобразователя «напряжение – частота»
Слайд 45 4. Быстродействие Б= 1/(Δt0+Δtподготовки) – как правило, его выбирают не выше одного
4. Быстродействие Б= 1/(Δt0+Δtподготовки) – как правило, его выбирают не выше одного
Слайд 46 Кодо – импульсные АЦП.
Принцип работы КИ АЦП основан на использовании преобразователей кода
Кодо – импульсные АЦП.
Принцип работы КИ АЦП основан на использовании преобразователей кода
Слайд 47 В исходном состоянии, при подаче кода «все нули» выходное напряжение ЦАП UЦАП
В исходном состоянии, при подаче кода «все нули» выходное напряжение ЦАП UЦАП
Слайд 48 Характеристики ЦАП:
1.Диапазон определяется напряжением ИОН U0,
2.Разрешающая способность – числом разрядов n двоичного
Характеристики ЦАП:
1.Диапазон определяется напряжением ИОН U0,
2.Разрешающая способность – числом разрядов n двоичного
Слайд 49 4.Время установления выходного напряжения tустЦАП. При скачкообразном изменении входного кода напряжение ЦАП
4.Время установления выходного напряжения tустЦАП. При скачкообразном изменении входного кода напряжение ЦАП
Слайд 50Структурная схема кодоимпульсного АЦП приведена на рис. 7-11.
Рис. 7-11
Структурная схема кодоимпульсного АЦП приведена на рис. 7-11.
Рис. 7-11
Слайд 51 Условные обозначения:
УВХ – устройство «выборки–хранения»,
ГТИ – генератор тактовых импульсов,
СУ – сравнивающее устройство
Условные обозначения:
УВХ – устройство «выборки–хранения»,
ГТИ – генератор тактовых импульсов,
СУ – сравнивающее устройство
Слайд 52Рис. 7-12
По фронту импульса запуска АЦП конденсатор быстро заряжается, а затем отключается
Рис. 7-12
По фронту импульса запуска АЦП конденсатор быстро заряжается, а затем отключается
Слайд 53 1. Алгоритм последовательного счета.
Для реализации алгоритма последовательного счета в устройстве управления используют
1. Алгоритм последовательного счета.
Для реализации алгоритма последовательного счета в устройстве управления используют
Слайд 54Рис. 7-13
Очевидно, что алгоритм последовательного счета не эффективен с точки зрения времени
Рис. 7-13
Очевидно, что алгоритм последовательного счета не эффективен с точки зрения времени
Слайд 55 Соответственно, быстродействие КИ АЦП при использовании алгоритма последовательного счета получается относительно невысоким:
Б=1/tпр
Соответственно, быстродействие КИ АЦП при использовании алгоритма последовательного счета получается относительно невысоким:
Б=1/tпр
Слайд 56 2. Алгоритм поразрядного уравновешивания (иногда его называют алгоритмом «последовательного приближения») позволяет существенным
2. Алгоритм поразрядного уравновешивания (иногда его называют алгоритмом «последовательного приближения») позволяет существенным
Слайд 57Рис. 7-14
Рис. 7-14
Слайд 58 При таком коде выходное напряжение ЦАП устанавливается равным половине диапазона измерения. Если
При таком коде выходное напряжение ЦАП устанавливается равным половине диапазона измерения. Если
Слайд 59 Следует, однако, иметь ввиду, что время установления напряжения ЦАП tуст.ЦАП - величина
Следует, однако, иметь ввиду, что время установления напряжения ЦАП tуст.ЦАП - величина
Слайд 60 Характеристики КИ АЦП, использующих два рассмотренных выше алгоритмов уравновешивания:
1.Диапазон измерения определяется источником
Характеристики КИ АЦП, использующих два рассмотренных выше алгоритмов уравновешивания:
1.Диапазон измерения определяется источником
Слайд 61 4.Время преобразования tпр и
5.Быстродействие Б зависят от используемого алгоритма уравновешивания (формулы приведены
4.Время преобразования tпр и
5.Быстродействие Б зависят от используемого алгоритма уравновешивания (формулы приведены
Слайд 62 3. Алгоритм следящего уравновешивания
Принципиальное отличие этого алгоритма работы КИ АЦП от двух
3. Алгоритм следящего уравновешивания
Принципиальное отличие этого алгоритма работы КИ АЦП от двух
Слайд 63 Сигма-дельта АЦП
Сигма- дельта (Σ-Δ) АЦП кодируют не непосредственно измеряемый сигнал Uх, а
Сигма-дельта АЦП
Сигма- дельта (Σ-Δ) АЦП кодируют не непосредственно измеряемый сигнал Uх, а
Слайд 64 Структурная схема простейшего двуполярного сигма-дельта АЦП (так называемого «первого порядка») представлена
Структурная схема простейшего двуполярного сигма-дельта АЦП (так называемого «первого порядка») представлена
Слайд 65Элементы схемы:
Σ – сумматор, который выполняет функцию вычитания, поскольку один из его
Элементы схемы:
Σ – сумматор, который выполняет функцию вычитания, поскольку один из его
Слайд 66 Не вдаваясь в детали, работу ΣΔ АЦП можно описать следующим образом. Представим,
Не вдаваясь в детали, работу ΣΔ АЦП можно описать следующим образом. Представим,
Слайд 67 Точно так же, когда значение сигнала приближается к отрицательному значению – VREF,
Точно так же, когда значение сигнала приближается к отрицательному значению – VREF,
Слайд 68 АЦП параллельного преобразования
Это самый быстродействующий из ныне существующих типов АЦП. Его структурная
АЦП параллельного преобразования
Это самый быстродействующий из ныне существующих типов АЦП. Его структурная
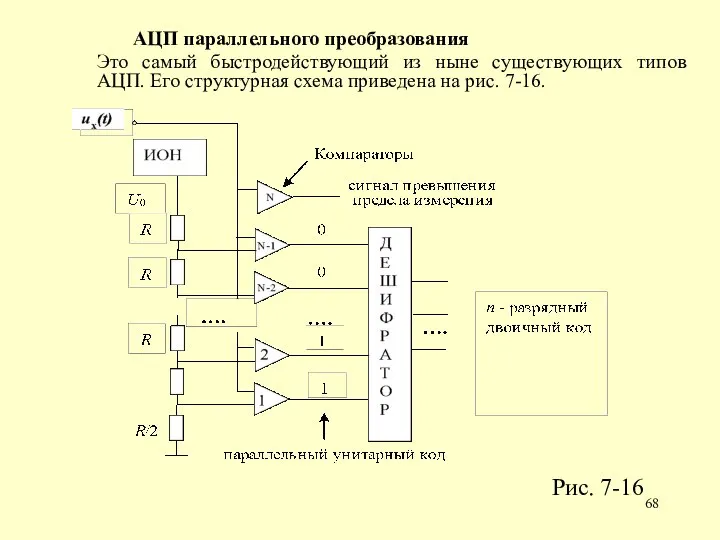
Слайд 69 Условные обзначения:
ИОН - источник опрного напряжения U0,
СУ1, СУ2,….СУN -1 - сравнивающие устройства
Условные обзначения:
ИОН - источник опрного напряжения U0,
СУ1, СУ2,….СУN -1 - сравнивающие устройства
Слайд 70 Характеристики параллельных АЦП:
1. Диапазон измерения Uмакс определяется напряжением ИОН U0.
2. Разрешающая способность
Характеристики параллельных АЦП:
1. Диапазон измерения Uмакс определяется напряжением ИОН U0.
2. Разрешающая способность
Слайд 71 Схемы реальных интегральных и модульных АЦП различных типов значительно сложнее, чем рассмотренные
Схемы реальных интегральных и модульных АЦП различных типов значительно сложнее, чем рассмотренные
Слайд 72 Автоматизация измерений
Для комплексного использования измерительных приборов и преобразователей, программного управления их работой
Автоматизация измерений
Для комплексного использования измерительных приборов и преобразователей, программного управления их работой
 Воспитательный потенциал семьи
Воспитательный потенциал семьи Система управления вязкостью топлива вспомогательного котла
Система управления вязкостью топлива вспомогательного котла Системы счисления и кодирование информации
Системы счисления и кодирование информации Беспроводная система управления
Беспроводная система управления Исследование опасности электромагнитной волны
Исследование опасности электромагнитной волны «ЭЛЕКТРОННАЯ БОЛЬНИЦА»
«ЭЛЕКТРОННАЯ БОЛЬНИЦА» Fit for partnership with Germany
Fit for partnership with Germany Домашние опасности
Домашние опасности Забытые виды спорта
Забытые виды спорта Презентация на тему Тундра и лесотундра России
Презентация на тему Тундра и лесотундра России  Наращение и дисконтирование по простым процентным ставкам. Тема 6.1
Наращение и дисконтирование по простым процентным ставкам. Тема 6.1 База - WPS Office
База - WPS Office Глагол
Глагол 1
1 Школьный парламент «Улей»
Школьный парламент «Улей» В лесу родилась елочка Здравствуй, Кузенька! Сынок! Не серчай, Кузенька! Нельзя мне в избушке без домового.
В лесу родилась елочка Здравствуй, Кузенька! Сынок! Не серчай, Кузенька! Нельзя мне в избушке без домового. Всеобщая декларация прав человека
Всеобщая декларация прав человека Презентация на тему Хромосомная теория наследственности 10 класс
Презентация на тему Хромосомная теория наследственности 10 класс  Профессиональный портрет педагога Политехнической школы
Профессиональный портрет педагога Политехнической школы В мире профессий (9 класс)
В мире профессий (9 класс) Зарубежная литература эпохи Просвещения
Зарубежная литература эпохи Просвещения О ликвидации 2 смены в школах Подмосковья
О ликвидации 2 смены в школах Подмосковья СОВРЕМЕННЫЕ МЕДИЦИНСКИЕ ТЕХНОЛОГИИ В ЗАМЕЩЕНИИ ПОСТРЕЗЕКЦИОННЫХ ДЕФЕКТОВ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРЕННОЙ КОСТИ
СОВРЕМЕННЫЕ МЕДИЦИНСКИЕ ТЕХНОЛОГИИ В ЗАМЕЩЕНИИ ПОСТРЕЗЕКЦИОННЫХ ДЕФЕКТОВ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРЕННОЙ КОСТИ Презентация на тему Что такое информация. Виды информации
Презентация на тему Что такое информация. Виды информации Диагностический инструментарий профориентационной работы: проблемы и перспективы
Диагностический инструментарий профориентационной работы: проблемы и перспективы Выступление старшего вице-президента ОАО «РЖД» Михайлова В.В.
Выступление старшего вице-президента ОАО «РЖД» Михайлова В.В. АВСТРИЯ – ЦЕНТР ВАШЕЙ ЭКОНОМИЧЕСКОЙ ДЕЯТЕЛЬНОСТИ
АВСТРИЯ – ЦЕНТР ВАШЕЙ ЭКОНОМИЧЕСКОЙ ДЕЯТЕЛЬНОСТИ о
о