- Наумов Лев Александрович

Содержание
- 2. Актуальность Большинство современных вычислительных задач требует для своего решения ресурсов, превосходящих возможности однопроцессорных компьютеров. Возникают новые
- 3. Основные задачи диссертационной работы Разработка метода введения обобщённых координат для решеток клеточных автоматов. Разработка на основе
- 4. Положения, выносимые на защиту и их научная новизна
- 5. Практическая полезность
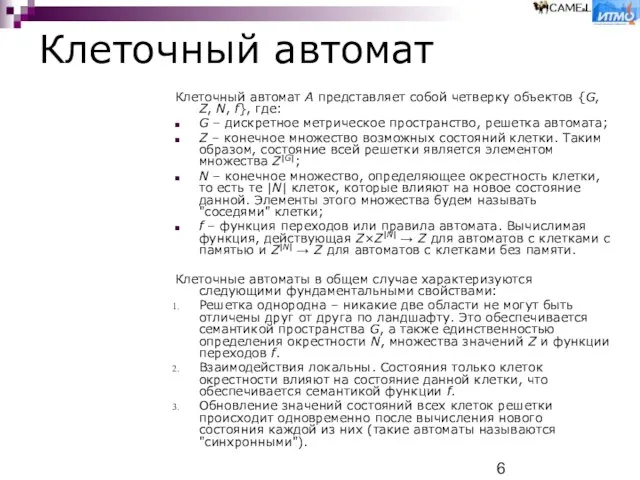
- 6. Клеточный автомат Клеточный автомат A представляет собой четверку объектов {G, Z, N, f}, где: G –
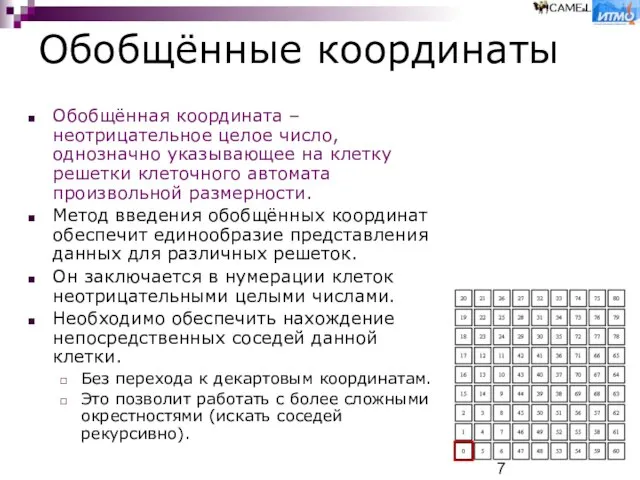
- 7. Обобщённые координаты Обобщённая координата – неотрицательное целое число, однозначно указывающее на клетку решетки клеточного автомата произвольной
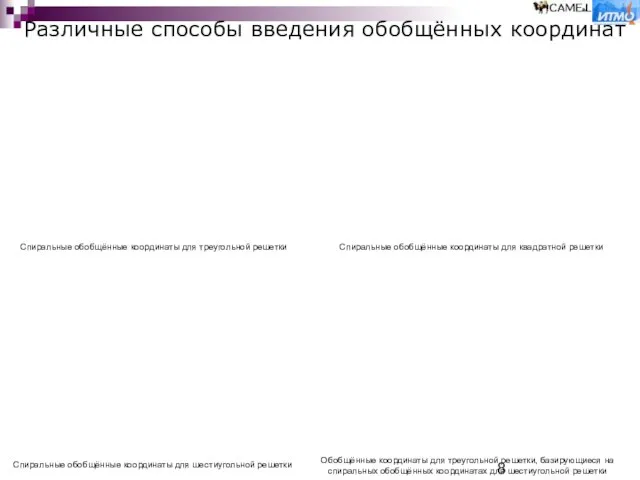
- 8. Обобщённые координаты для треугольной решетки, базирующиеся на спиральных обобщённых координатах для шестиугольной решетки Спиральные обобщённые координаты
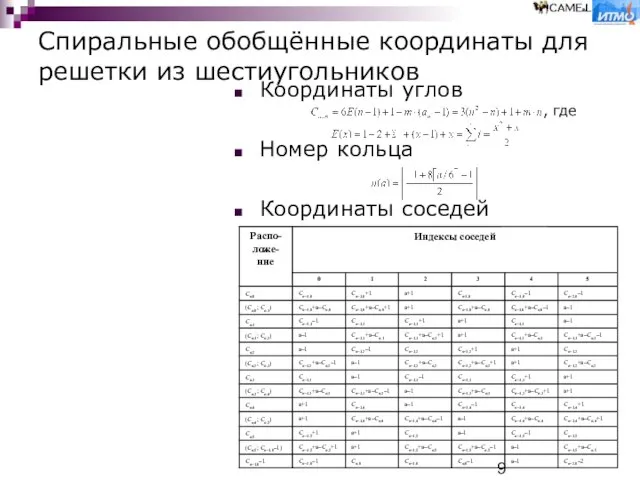
- 9. Координаты углов Номер кольца Координаты соседей , где Спиральные обобщённые координаты для решетки из шестиугольников
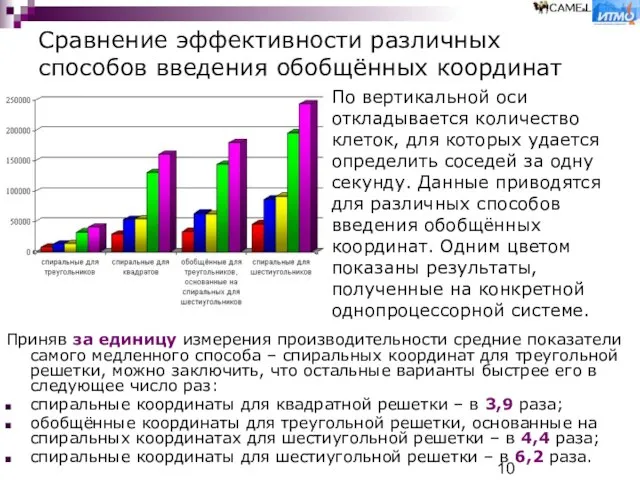
- 10. Сравнение эффективности различных способов введения обобщённых координат Приняв за единицу измерения производительности средние показатели самого медленного
- 11. Преимущества и недостатки обобщённых координат Преимущества Обобщённые координаты обеспечивают универсальность организации данных, позволяя хранить состояния различных
- 12. Компонентная модель декомпозиции клеточных автоматов Каждый клеточный автомат целесообразно представлять набором компонентов следующих четырех типов: Решетка
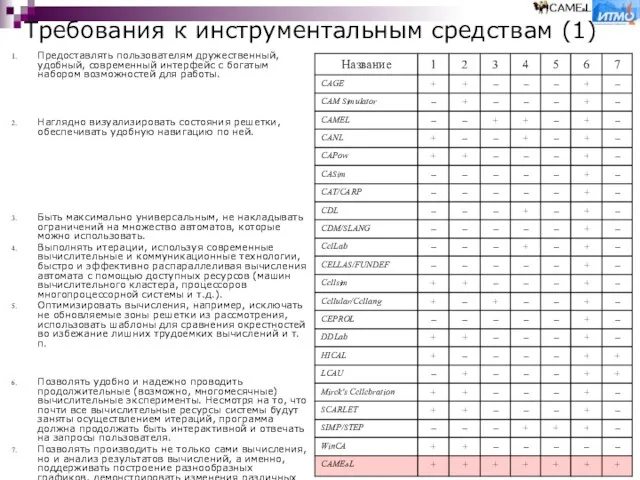
- 13. Требования к инструментальным средствам (1) Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым набором возможностей для
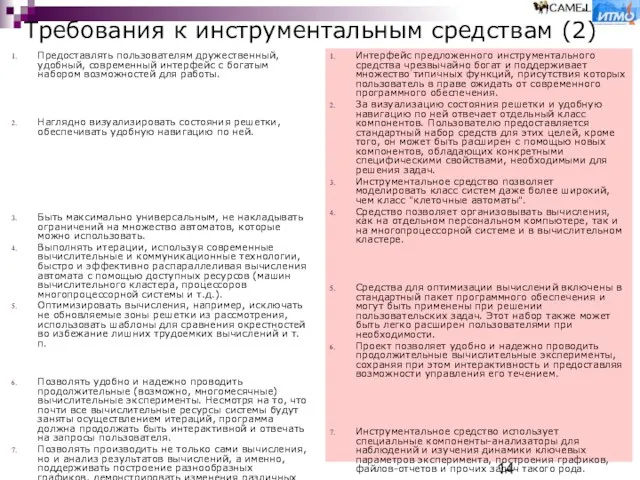
- 14. Требования к инструментальным средствам (2) Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым набором возможностей для
- 15. Структурная схема инструментального средства CAME&L = среда выполнения + библиотека CADLib + стандартные компоненты CAME&L –
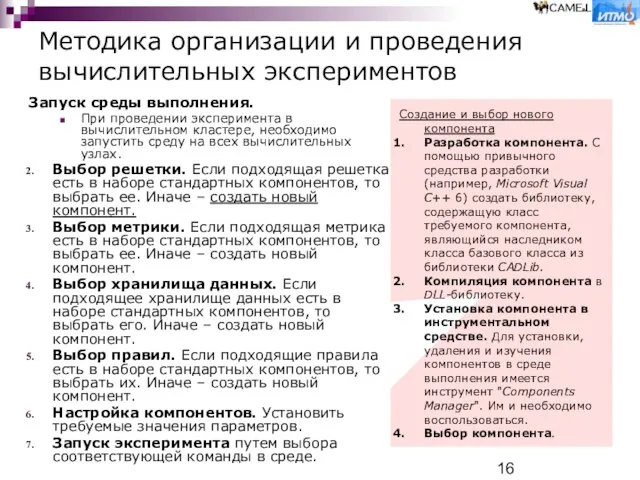
- 16. Методика организации и проведения вычислительных экспериментов Запуск среды выполнения. При проведении эксперимента в вычислительном кластере, необходимо
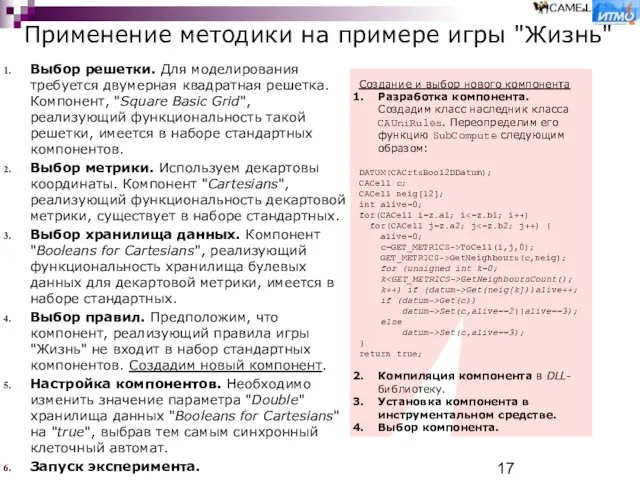
- 17. Применение методики на примере игры "Жизнь" Выбор решетки. Для моделирования требуется двумерная квадратная решетка. Компонент, "Square
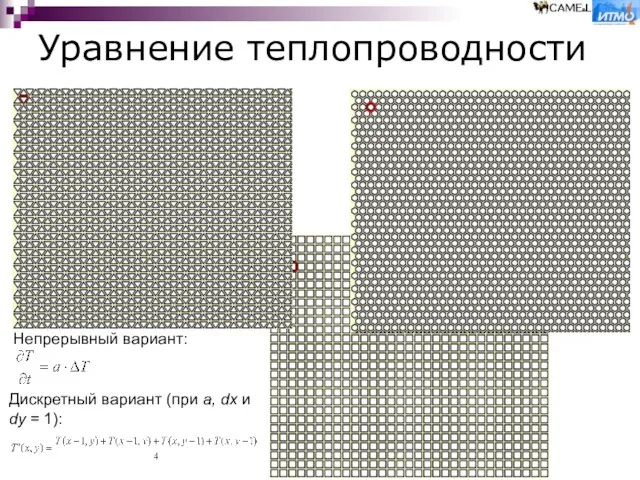
- 18. Уравнение теплопроводности Непрерывный вариант: Дискретный вариант (при a, dx и dy = 1):
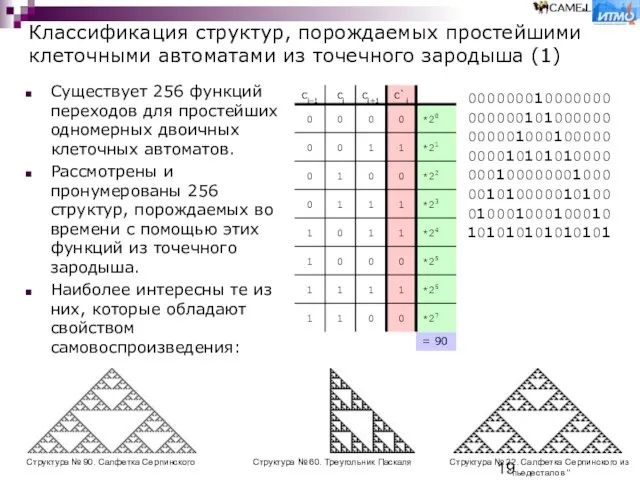
- 19. Существует 256 функций переходов для простейших одномерных двоичных клеточных автоматов. Рассмотрены и пронумерованы 256 структур, порождаемых
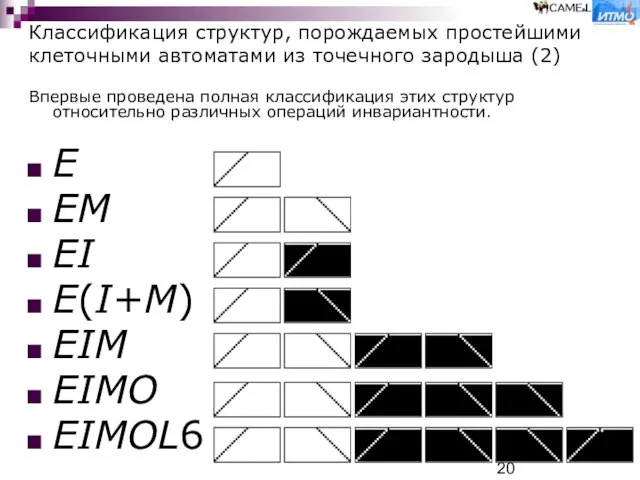
- 20. Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (2) Впервые проведена полная классификация этих структур
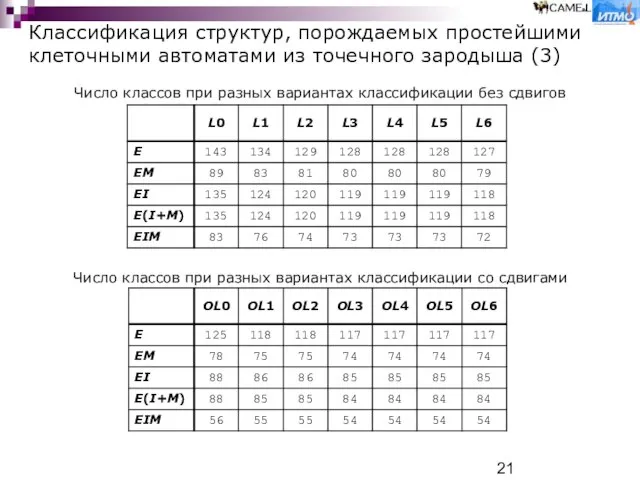
- 21. Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (3) Число классов при разных вариантах классификации
- 22. Внедрение Научные исследования В СПбГУ ИТМО при исследованиях по грантам Министерства образования и науки РФ, а
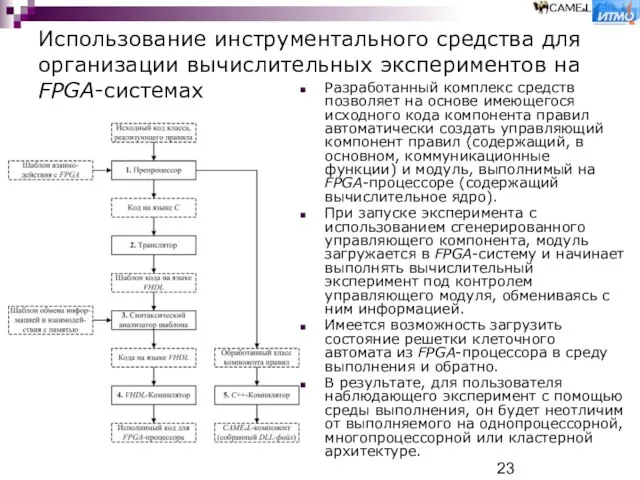
- 23. Использование инструментального средства для организации вычислительных экспериментов на FPGA-системах Разработанный комплекс средств позволяет на основе имеющегося
- 24. Заключение В диссертации получены следующие результаты: Введено понятие "обобщенные координаты" для решеток клеточных автоматов. Разработан метод
- 25. Публикации Наумов Л. Как увеличить скорость "Жизни", или Эффективная организация данных для повышения скорости поиска клеток
- 27. Скачать презентацию
Слайд 2Актуальность
Большинство современных вычислительных задач требует для своего решения ресурсов, превосходящих возможности однопроцессорных
Актуальность
Большинство современных вычислительных задач требует для своего решения ресурсов, превосходящих возможности однопроцессорных
Слайд 3Основные задачи диссертационной работы
Разработка метода введения обобщённых координат для решеток клеточных автоматов.
Разработка
Основные задачи диссертационной работы
Разработка метода введения обобщённых координат для решеток клеточных автоматов.
Разработка
Слайд 4Положения, выносимые на защиту и их научная новизна
Положения, выносимые на защиту и их научная новизна
Слайд 5Практическая полезность
Практическая полезность
Слайд 6Клеточный автомат
Клеточный автомат A представляет собой четверку объектов {G, Z, N, f},
Клеточный автомат
Клеточный автомат A представляет собой четверку объектов {G, Z, N, f},
Слайд 7Обобщённые координаты
Обобщённая координата – неотрицательное целое число, однозначно указывающее на клетку решетки
Обобщённые координаты
Обобщённая координата – неотрицательное целое число, однозначно указывающее на клетку решетки
Слайд 8Обобщённые координаты для треугольной решетки, базирующиеся на спиральных обобщённых координатах для шестиугольной
Обобщённые координаты для треугольной решетки, базирующиеся на спиральных обобщённых координатах для шестиугольной
Слайд 9Координаты углов
Номер кольца
Координаты соседей
, где
Спиральные обобщённые координаты для решетки из шестиугольников
Координаты углов
Номер кольца
Координаты соседей
, где
Спиральные обобщённые координаты для решетки из шестиугольников
Слайд 10Сравнение эффективности различных способов введения обобщённых координат
Приняв за единицу измерения производительности средние
Сравнение эффективности различных способов введения обобщённых координат
Приняв за единицу измерения производительности средние
Слайд 11Преимущества и недостатки обобщённых координат
Преимущества
Обобщённые координаты обеспечивают универсальность организации данных, позволяя хранить
Преимущества и недостатки обобщённых координат
Преимущества
Обобщённые координаты обеспечивают универсальность организации данных, позволяя хранить
Слайд 12Компонентная модель декомпозиции клеточных автоматов
Каждый клеточный автомат целесообразно представлять набором компонентов следующих
Компонентная модель декомпозиции клеточных автоматов
Каждый клеточный автомат целесообразно представлять набором компонентов следующих
Слайд 13Требования к инструментальным средствам (1)
Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым
Требования к инструментальным средствам (1)
Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым
Слайд 14Требования к инструментальным средствам (2)
Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым
Требования к инструментальным средствам (2)
Предоставлять пользователям дружественный, удобный, современный интерфейс с богатым
Слайд 15Структурная схема инструментального средства
CAME&L = среда выполнения + библиотека CADLib + стандартные
Структурная схема инструментального средства
CAME&L = среда выполнения + библиотека CADLib + стандартные

Слайд 16Методика организации и проведения вычислительных экспериментов
Запуск среды выполнения.
При проведении эксперимента в вычислительном
Методика организации и проведения вычислительных экспериментов
Запуск среды выполнения.
При проведении эксперимента в вычислительном
Слайд 17Применение методики на примере игры "Жизнь"
Выбор решетки. Для моделирования требуется двумерная квадратная
Применение методики на примере игры "Жизнь"
Выбор решетки. Для моделирования требуется двумерная квадратная
Слайд 18Уравнение теплопроводности
Непрерывный вариант:
Дискретный вариант (при a, dx и dy = 1):
Уравнение теплопроводности
Непрерывный вариант:
Дискретный вариант (при a, dx и dy = 1):
Слайд 19Существует 256 функций переходов для простейших одномерных двоичных клеточных автоматов.
Рассмотрены и пронумерованы
Существует 256 функций переходов для простейших одномерных двоичных клеточных автоматов.
Рассмотрены и пронумерованы
Слайд 20Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (2)
Впервые проведена полная
Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (2)
Впервые проведена полная
Слайд 21Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (3)
Число классов при
Классификация структур, порождаемых простейшими клеточными автоматами из точечного зародыша (3)
Число классов при
Слайд 22Внедрение
Научные исследования
В СПбГУ ИТМО при исследованиях по грантам Министерства образования и науки
Внедрение
Научные исследования
В СПбГУ ИТМО при исследованиях по грантам Министерства образования и науки
Слайд 23Использование инструментального средства для организации вычислительных экспериментов на FPGA-системах
Разработанный комплекс средств позволяет
Использование инструментального средства для организации вычислительных экспериментов на FPGA-системах
Разработанный комплекс средств позволяет
Слайд 24Заключение
В диссертации получены следующие результаты:
Введено понятие "обобщенные координаты" для решеток клеточных автоматов.
Заключение
В диссертации получены следующие результаты:
Введено понятие "обобщенные координаты" для решеток клеточных автоматов.
Слайд 25Публикации
Наумов Л. Как увеличить скорость "Жизни", или Эффективная организация данных для повышения
Публикации
Наумов Л. Как увеличить скорость "Жизни", или Эффективная организация данных для повышения
 Ставропольское культурологическое общество
Ставропольское культурологическое общество «Окрылённые призванием…»
«Окрылённые призванием…» Основные сражения во время Великой Отечественной войны
Основные сражения во время Великой Отечественной войны Военная реформа
Военная реформа Кластерный анализ. Метод к – средних
Кластерный анализ. Метод к – средних Ветеран живет рядом
Ветеран живет рядом кулинарный поединок
кулинарный поединок Значение обязательности подготовки граждан к военной службе
Значение обязательности подготовки граждан к военной службе 6 июля 2010 г. Наблюдение излучения Вавилова- Черенкова и заряженных частиц ШАЛ под большими зенитными углами Р.У. Бейсембаев, Ю.Н. Вав
6 июля 2010 г. Наблюдение излучения Вавилова- Черенкова и заряженных частиц ШАЛ под большими зенитными углами Р.У. Бейсембаев, Ю.Н. Вав Определение философии
Определение философии  Презентация на тему Организация основ самоуправления учеников начальных классов
Презентация на тему Организация основ самоуправления учеников начальных классов Презентация 2019
Презентация 2019 Принципы лучевой терапии ЗНО
Принципы лучевой терапии ЗНО Правила получения и оплаты листка нетрудоспособности
Правила получения и оплаты листка нетрудоспособности Юридические коллизии: понятие и способы их разрешения
Юридические коллизии: понятие и способы их разрешения Работа школы во время Великой Отечественной Войны
Работа школы во время Великой Отечественной Войны Дрессировка Лобзика. Собери пазл
Дрессировка Лобзика. Собери пазл Этикет
Этикет Дидактические материалы к обобщающему уроку по курсу «ВОКРУГ ТЕБЯ – МИР…» АВТОР: Воронина Лариса Вячеславовна, учитель русского
Дидактические материалы к обобщающему уроку по курсу «ВОКРУГ ТЕБЯ – МИР…» АВТОР: Воронина Лариса Вячеславовна, учитель русского П Л А Ндействий по модернизации общего образования на 2011 - 2013 годы, и далее до 2015 года, направленный на реализациюпоручения
П Л А Ндействий по модернизации общего образования на 2011 - 2013 годы, и далее до 2015 года, направленный на реализациюпоручения  Поэтапное рисование: Весна. Первые проталины.
Поэтапное рисование: Весна. Первые проталины. Презентация на тему Первые конфликты и кризисы «Холодной войны»
Презентация на тему Первые конфликты и кризисы «Холодной войны»  Презентация на тему Спинной мозг
Презентация на тему Спинной мозг Италия, Милан
Италия, Милан История KOMANDOR
История KOMANDOR Алексей Константинович Толстой Козьма Прутков
Алексей Константинович Толстой Козьма Прутков Аккредитив
Аккредитив Презентация на тему История развития хирургии. Организация хирургической помощи и деонтология в хирургии
Презентация на тему История развития хирургии. Организация хирургической помощи и деонтология в хирургии