- Обзорно-сравнительные радионавигационные системы (корреляционно-экстремальная система)

Содержание
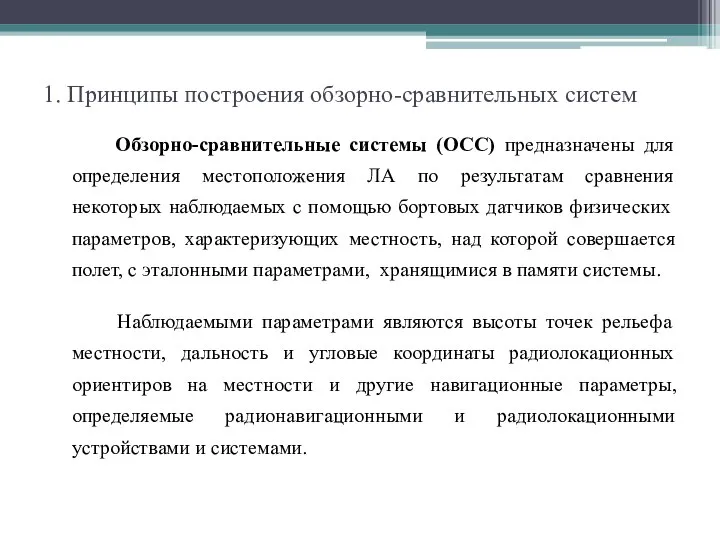
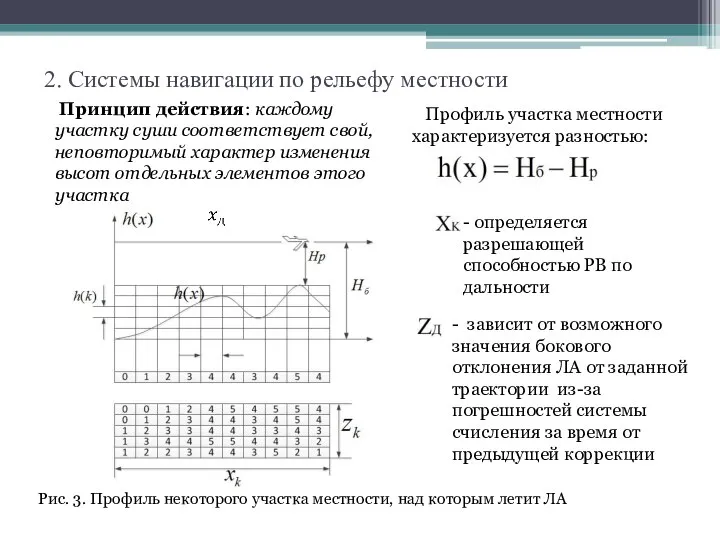
- 2. 1. Принципы построения обзорно-сравнительных систем Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения ЛА по результатам сравнения
- 3. Принцип действия ОСС заключается в следующем: во-первых, заранее должны быть изготовлена эталонная карта местности (ЭКМ); во
- 4. Рис. 2. Обобщенная структурная схема ООС Рис. 1. Отклонение текущего положения от заданного
- 5. Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности, над которой происходит полет ЛА. Формирователь
- 6. Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет ВКФ наблюдаемого (ТКМ) и эталонного (ЭКМ)
- 7. Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет ЦВМ ОСС. Системы, в которых информация
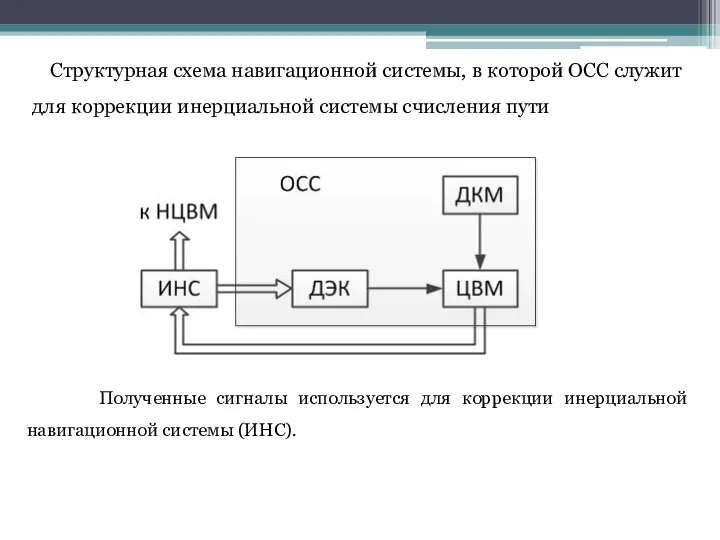
- 8. Структурная схема навигационной системы, в которой ОСС служит для коррекции инерциальной системы счисления пути Полученные сигналы
- 9. В зависимости от вида получаемой в системе текущей карты местности различают два основных типа ОСС: системы
- 10. - определяется разрешающей способностью РВ по дальности - зависит от возможного значения бокового отклонения ЛА от
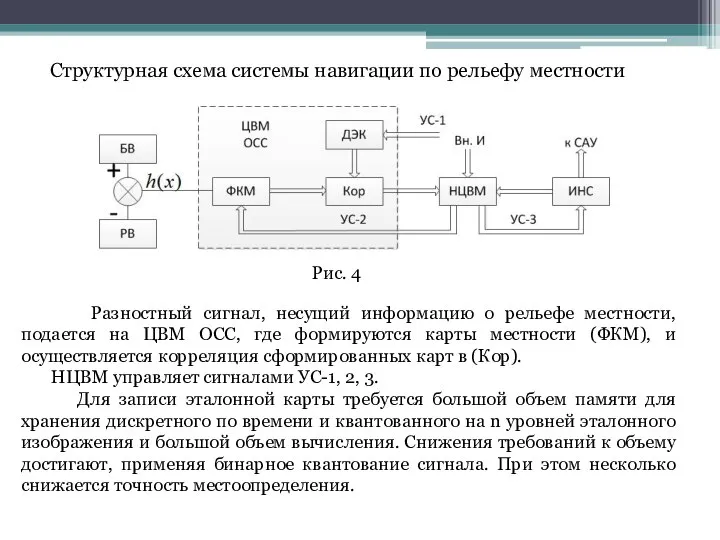
- 11. Рис. 4 Разностный сигнал, несущий информацию о рельефе местности, подается на ЦВМ ОСС, где формируются карты
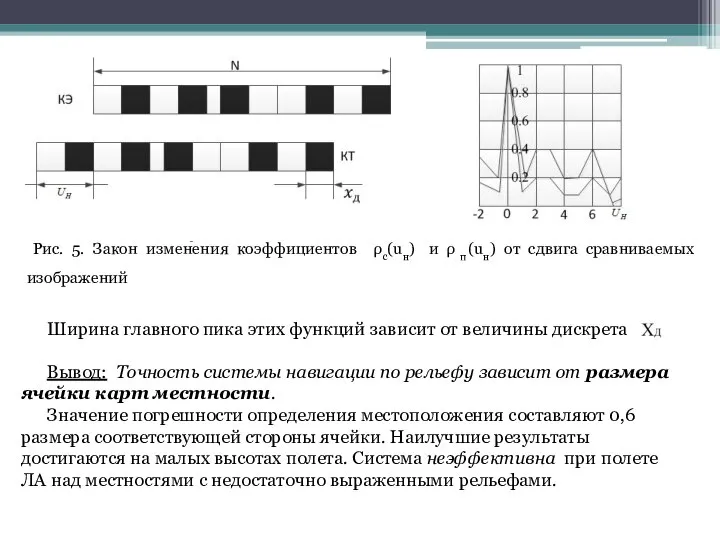
- 12. Ширина главного пика этих функций зависит от величины дискрета Вывод: Точность системы навигации по рельефу зависит
- 13. 3. Системы навигации по картам местности Системы, в которых в качестве датчиков используются радиолокаторы, относятся к
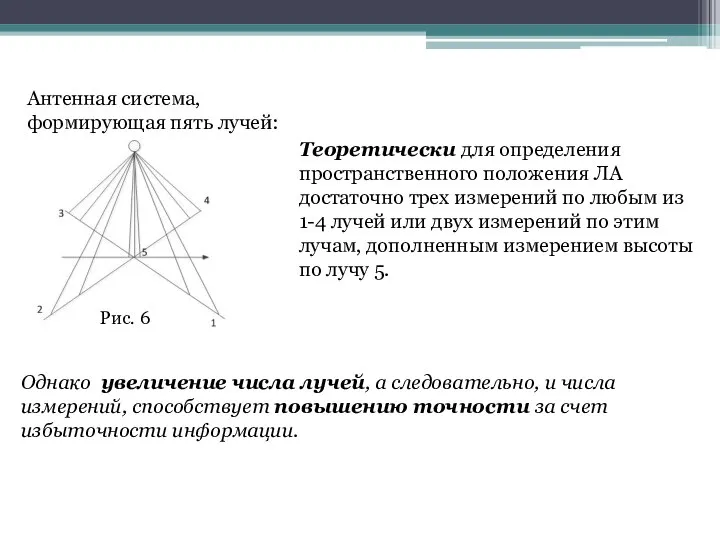
- 14. Рис. 6 Антенная система, формирующая пять лучей: Теоретически для определения пространственного положения ЛА достаточно трех измерений
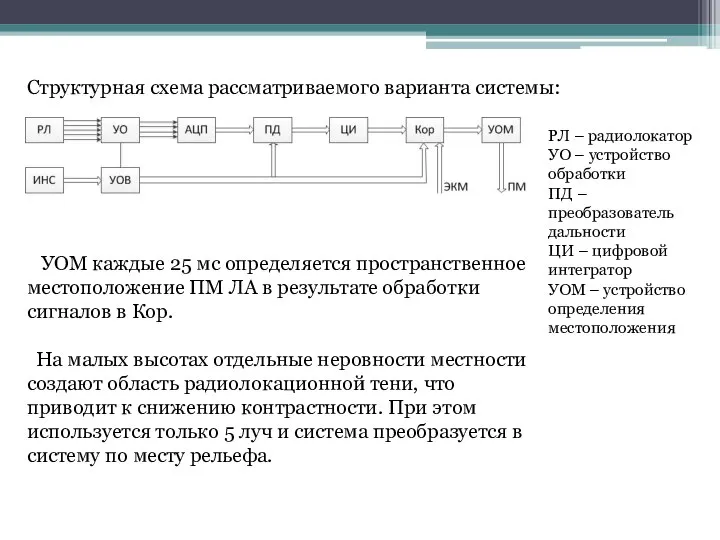
- 15. УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в результате обработки сигналов в Кор. На
- 17. Скачать презентацию
Слайд 21. Принципы построения обзорно-сравнительных систем
Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения
1. Принципы построения обзорно-сравнительных систем
Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения
Слайд 3Принцип действия ОСС заключается в следующем:
во-первых, заранее должны быть изготовлена эталонная карта
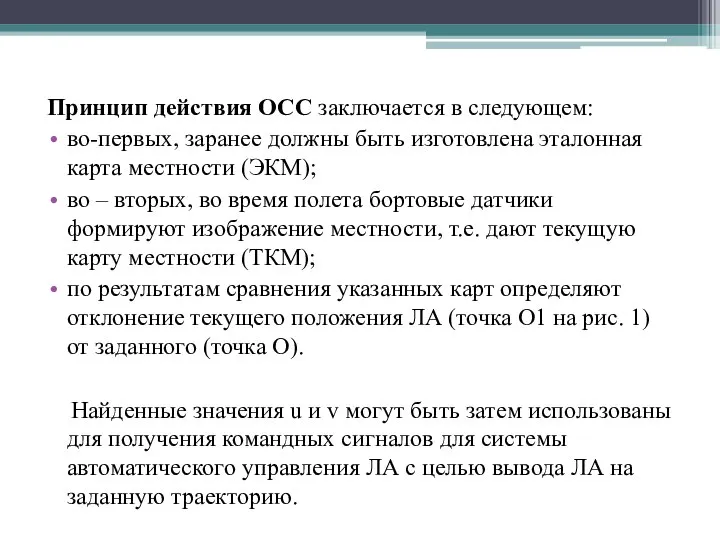
Принцип действия ОСС заключается в следующем:
во-первых, заранее должны быть изготовлена эталонная карта
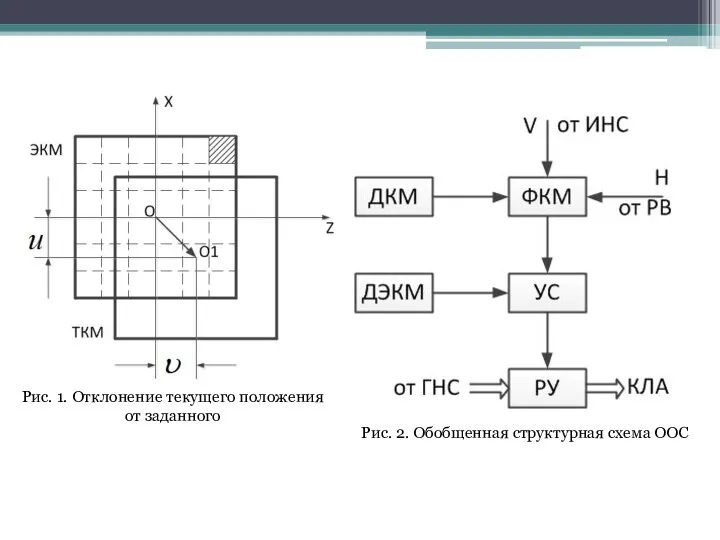
Слайд 4Рис. 2. Обобщенная структурная схема ООС
Рис. 1. Отклонение текущего положения от заданного
Рис. 1. Отклонение текущего положения от заданного
Слайд 5 Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности, над
Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие нормативные параметры местности, над
Слайд 6 Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет ВКФ
Обычно устройство сравнения карт местности представляет собой коррелятор, который вычисляет ВКФ
Слайд 7 Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет ЦВМ
Функции формирователя карты местности, сравнивающего и решающего устройства обычно выполняет ЦВМ
Слайд 8 Структурная схема навигационной системы, в которой ОСС служит для коррекции инерциальной
Структурная схема навигационной системы, в которой ОСС служит для коррекции инерциальной
Слайд 9 В зависимости от вида получаемой в системе текущей карты местности различают
В зависимости от вида получаемой в системе текущей карты местности различают
Слайд 10
- определяется разрешающей способностью РВ по дальности
- зависит от возможного значения бокового
- определяется разрешающей способностью РВ по дальности
- зависит от возможного значения бокового
Слайд 11Рис. 4
Разностный сигнал, несущий информацию о рельефе местности, подается на ЦВМ
Рис. 4
Разностный сигнал, несущий информацию о рельефе местности, подается на ЦВМ
Слайд 12Ширина главного пика этих функций зависит от величины дискрета
Вывод: Точность
Вывод: Точность
Слайд 133. Системы навигации по картам местности
Системы, в которых в качестве датчиков
3. Системы навигации по картам местности
Системы, в которых в качестве датчиков
Слайд 14Рис. 6
Антенная система, формирующая пять лучей:
Теоретически для определения пространственного положения ЛА достаточно
Рис. 6
Антенная система, формирующая пять лучей:
Теоретически для определения пространственного положения ЛА достаточно
Слайд 15 УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в результате
УОМ каждые 25 мс определяется пространственное местоположение ПМ ЛА в результате
 Великолепная Восьмерка и Илья
Великолепная Восьмерка и Илья Спортивная гимнастика
Спортивная гимнастика Турецкая республика
Турецкая республика Районный конкурс декоративно - прикладного и технического творчества «Человек. Земля. Вселенная»
Районный конкурс декоративно - прикладного и технического творчества «Человек. Земля. Вселенная» Можно ли быть универсальным спортсменом?
Можно ли быть универсальным спортсменом? How are you
How are you ИНСТИТУТ ЭКОНОМИКИ И УПРАВЛЕНИЯ УГАТУ
ИНСТИТУТ ЭКОНОМИКИ И УПРАВЛЕНИЯ УГАТУ Ever After High. Викторина
Ever After High. Викторина TV in people’s lives
TV in people’s lives Бихевиоризм
Бихевиоризм Банковское обслуживание физических лиц СберКАССАСберКАССА.
Банковское обслуживание физических лиц СберКАССАСберКАССА. Бюджет здравоохранения: какая информация необходима лицам, принимающим решение? Хабриев Р.У. Академик РАМН, первый проректор РНИМ
Бюджет здравоохранения: какая информация необходима лицам, принимающим решение? Хабриев Р.У. Академик РАМН, первый проректор РНИМ Итоги августа
Итоги августа Олимпиада по русскому языку 3 класс
Олимпиада по русскому языку 3 класс Дресс код
Дресс код Презентация год культуры
Презентация год культуры Опыт Российско-Британского сотрудничества в рамках проекта BRIDGE «Обучение и управление в здравоохранении»: уроки и практические
Опыт Российско-Британского сотрудничества в рамках проекта BRIDGE «Обучение и управление в здравоохранении»: уроки и практические  Организация работы мясного цеха
Организация работы мясного цеха Классификация имущества по источникам формирования и целевому назначению
Классификация имущества по источникам формирования и целевому назначению Презентация на тему Человеческие расы
Презентация на тему Человеческие расы  Презентация на тему Приложение определенного интеграла в экономике
Презентация на тему Приложение определенного интеграла в экономике Он писал не только о любви
Он писал не только о любви Динамика процентных выплат
Динамика процентных выплат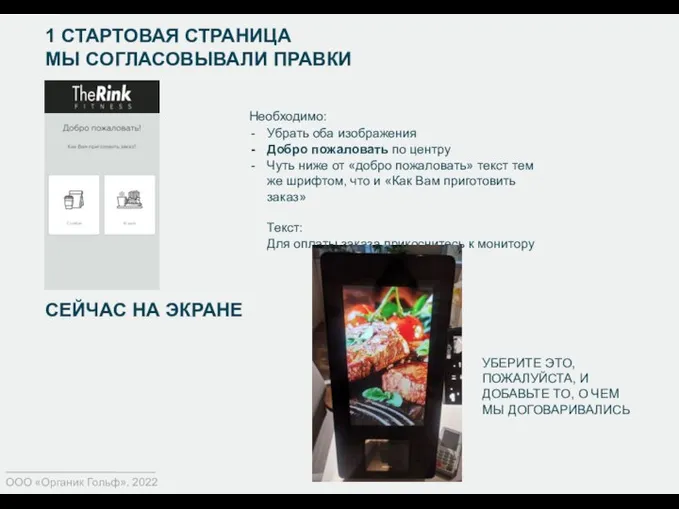 The Rink Fitness_терминал_17102022
The Rink Fitness_терминал_17102022 Презентация на тему Уравнения
Презентация на тему Уравнения «Плотоядные» растения
«Плотоядные» растения Планирование учебного процесса на основе перехода к системе зачетных единиц
Планирование учебного процесса на основе перехода к системе зачетных единиц Современное производство
Современное производство