- Основы автоматического управления

Содержание
- 2. 2 Устойчивость систем с запаздыванием и систем с иррациональными звеньями Все реальные системы автоматического регулирования являются
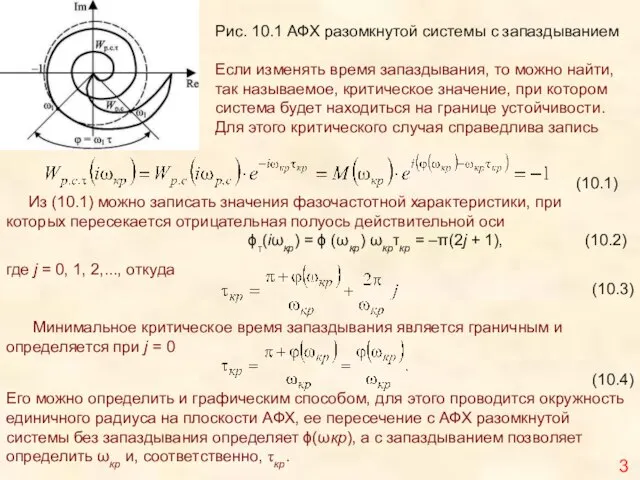
- 3. 3 Рис. 10.1 АФХ разомкнутой системы с запаздыванием Если изменять время запаздывания, то можно найти, так
- 4. Обеспечение устойчивости Устойчивые и неустойчивые звенья и соединения Все звенья систем автоматического регулирования подразделяются на устойчивые
- 5. 5 что геометрически отражает факт прохождения АФХ разомкнутой системы через точку (–1, i0). Здесь Wрег(S0, S1,
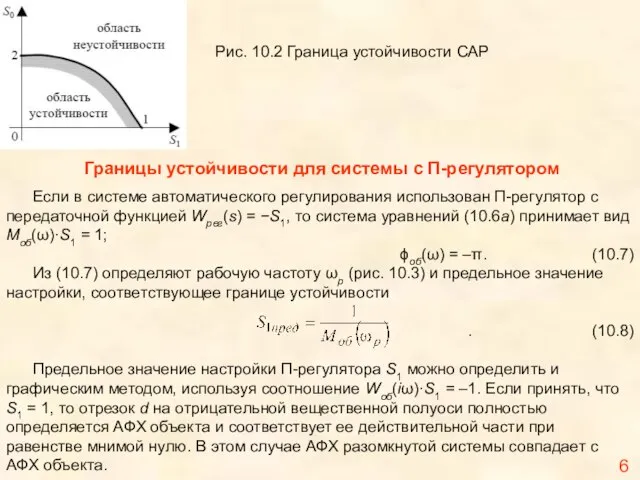
- 6. Границы устойчивости для системы с П-регулятором Если в системе автоматического регулирования использован П-регулятор с передаточной функцией
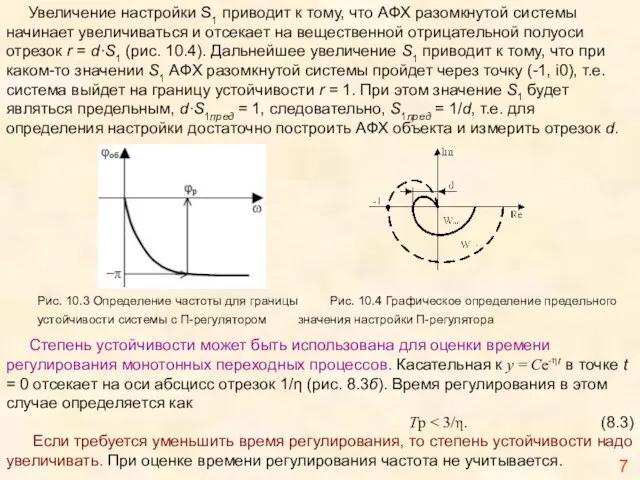
- 7. Увеличение настройки S1 приводит к тому, что АФХ разомкнутой системы начинает увеличиваться и отсекает на вещественной
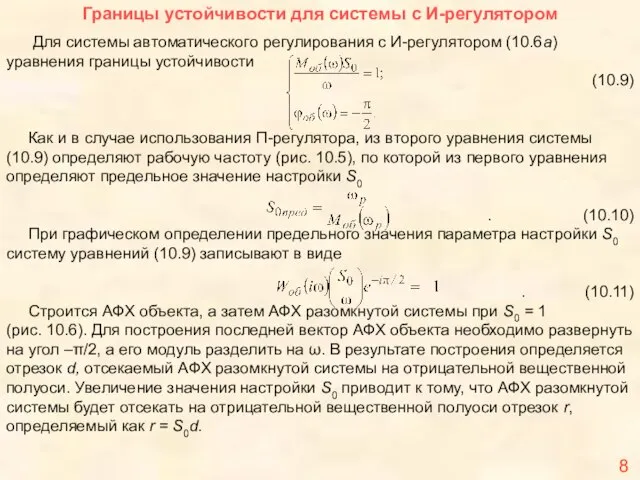
- 8. Границы устойчивости для системы с И-регулятором Для системы автоматического регулирования с И-регулятором (10.6а) уравнения границы устойчивости
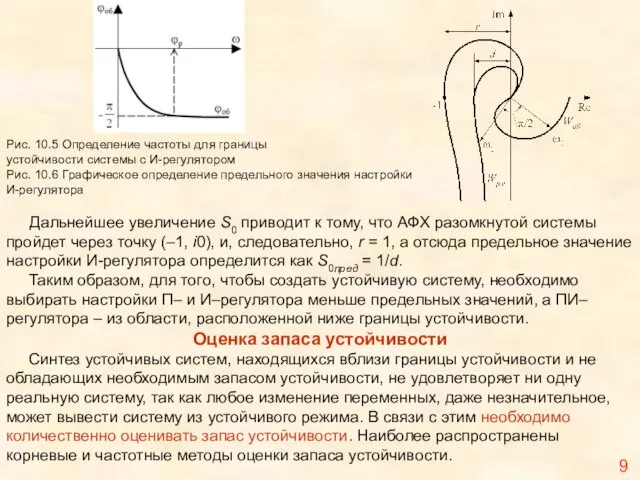
- 9. Рис. 10.5 Определение частоты для границы устойчивости системы с И-регулятором Рис. 10.6 Графическое определение предельного значения
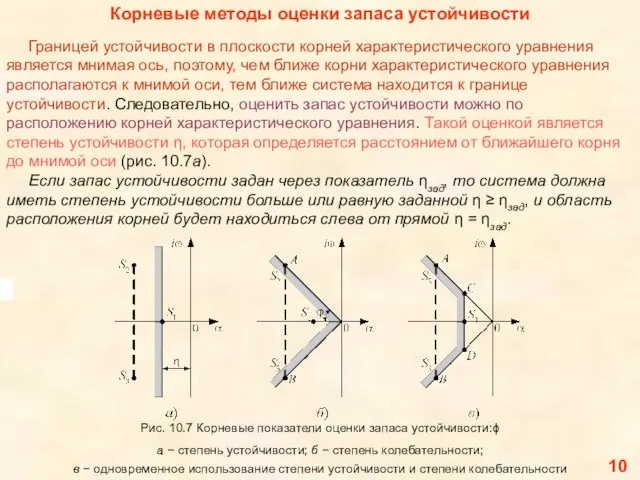
- 10. 10 Корневые методы оценки запаса устойчивости Границей устойчивости в плоскости корней характеристического уравнения является мнимая ось,
- 11. Другим показателем этой группы является степень колебательности m − модуль минимального отношения мнимой и действительной частей
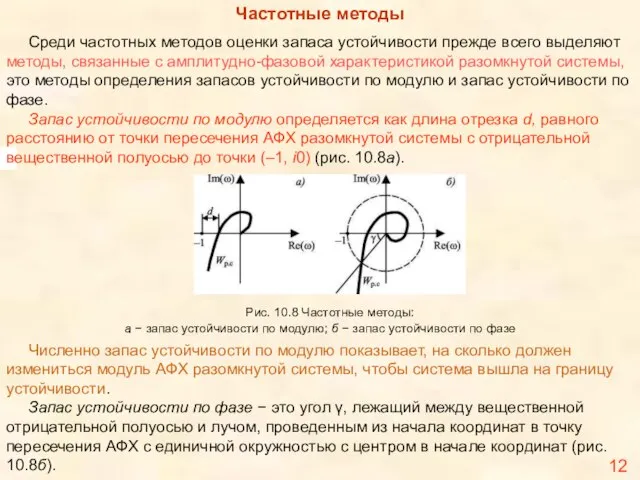
- 12. 12 Рис. 10.8 Частотные методы: а − запас устойчивости по модулю; б − запас устойчивости по
- 13. 13 Численно запас устойчивости по фазе показывает, насколько должно увеличиться отставание по фазе в разомкнутой системе
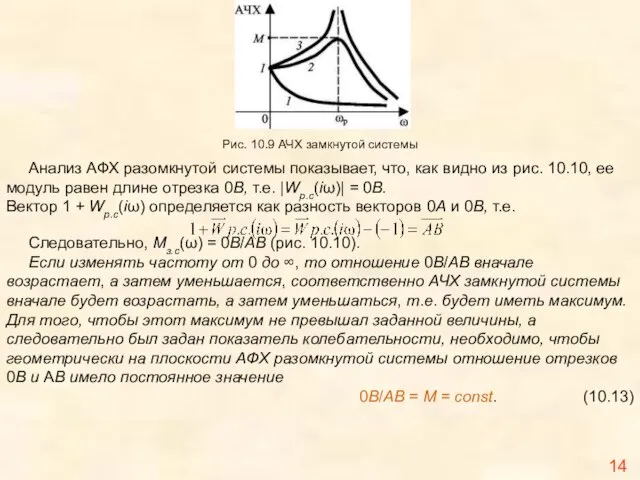
- 14. 14 Рис. 10.9 АЧХ замкнутой системы Анализ АФХ разомкнутой системы показывает, что, как видно из рис.
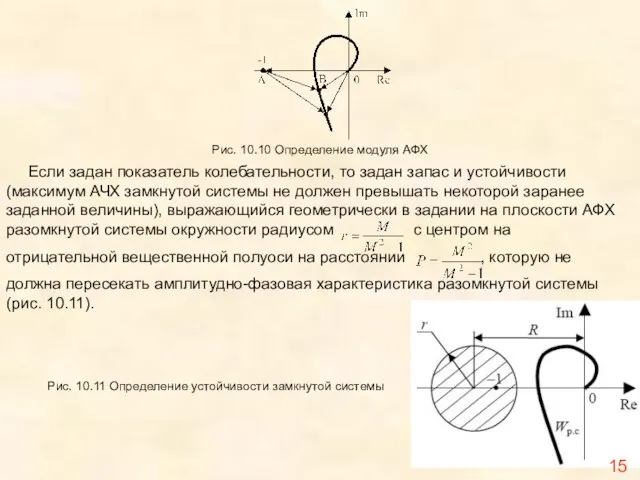
- 15. 15 Рис. 10.10 Определение модуля АФХ Если задан показатель колебательности, то задан запас и устойчивости (максимум
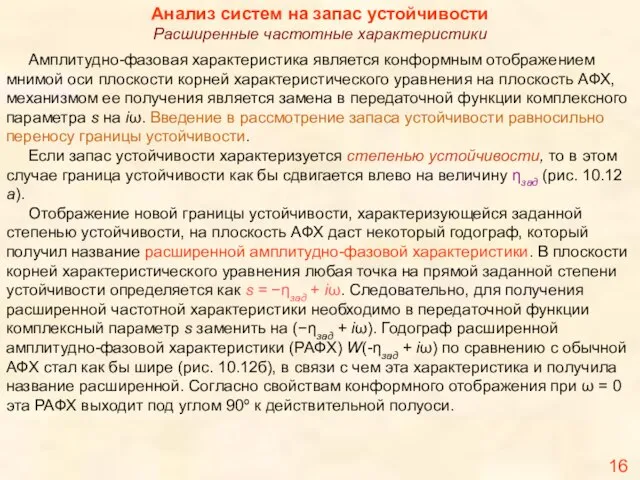
- 16. 16 Анализ систем на запас устойчивости Расширенные частотные характеристики Амплитудно-фазовая характеристика является конформным отображением мнимой оси
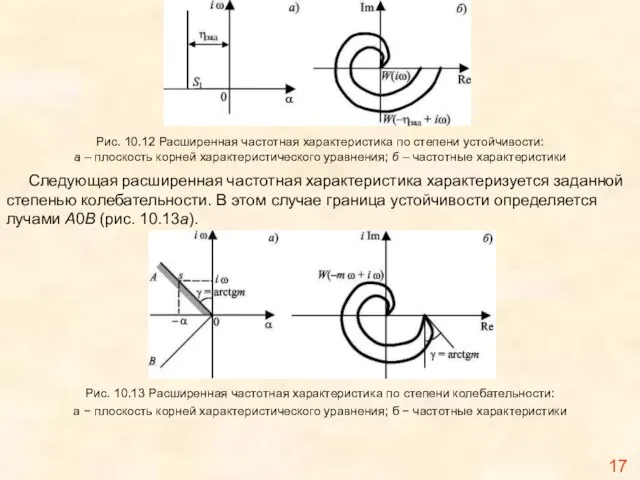
- 17. 17 Рис. 10.12 Расширенная частотная характеристика по степени устойчивости: а – плоскость корней характеристического уравнения; б
- 18. Отображение этой границы на плоскости АФХ и дает годограф расширенной амплитудно-фазовой характеристики по степени колебательности m.
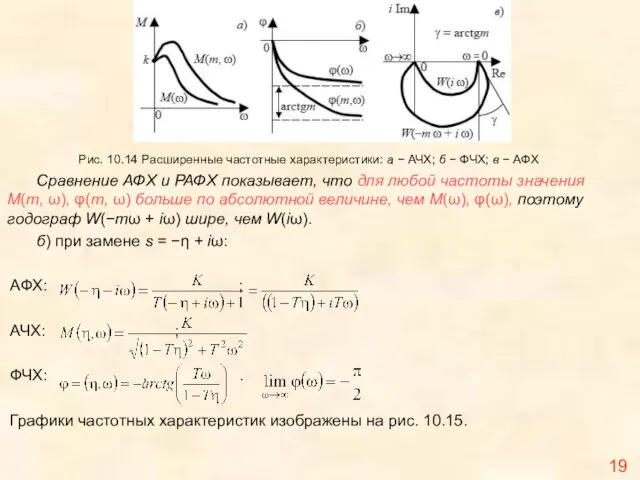
- 19. Рис. 10.14 Расширенные частотные характеристики: а − АЧХ; б − ФЧХ; в − АФХ Сравнение АФХ
- 21. Скачать презентацию
Слайд 33
Рис. 10.1 АФХ разомкнутой системы с запаздыванием
Если изменять время запаздывания, то можно
3
Рис. 10.1 АФХ разомкнутой системы с запаздыванием
Если изменять время запаздывания, то можно
Слайд 4 Обеспечение устойчивости
Устойчивые и неустойчивые звенья и соединения
Все звенья систем автоматического
Обеспечение устойчивости
Устойчивые и неустойчивые звенья и соединения
Все звенья систем автоматического
Слайд 55
что геометрически отражает факт прохождения АФХ разомкнутой системы через точку (–1, i0).
5
что геометрически отражает факт прохождения АФХ разомкнутой системы через точку (–1, i0).
Слайд 6 Границы устойчивости для системы с П-регулятором
Если в системе автоматического регулирования
Границы устойчивости для системы с П-регулятором
Если в системе автоматического регулирования
Слайд 7 Увеличение настройки S1 приводит к тому, что АФХ разомкнутой системы начинает
Увеличение настройки S1 приводит к тому, что АФХ разомкнутой системы начинает
Слайд 8Границы устойчивости для системы с И-регулятором
Для системы автоматического регулирования с И-регулятором
Границы устойчивости для системы с И-регулятором
Для системы автоматического регулирования с И-регулятором
Слайд 9Рис. 10.5 Определение частоты для границы
устойчивости системы с И-регулятором
Рис. 10.6 Графическое
Рис. 10.5 Определение частоты для границы
устойчивости системы с И-регулятором
Рис. 10.6 Графическое
Слайд 1010
Корневые методы оценки запаса устойчивости
Границей устойчивости в плоскости корней характеристического
10
Корневые методы оценки запаса устойчивости
Границей устойчивости в плоскости корней характеристического
Слайд 11 Другим показателем этой группы является степень колебательности m − модуль минимального
Другим показателем этой группы является степень колебательности m − модуль минимального
Слайд 1212
Рис. 10.8 Частотные методы:
а − запас устойчивости по модулю; б
12
Рис. 10.8 Частотные методы:
а − запас устойчивости по модулю; б
Слайд 1313
Численно запас устойчивости по фазе показывает, насколько должно увеличиться отставание по
13
Численно запас устойчивости по фазе показывает, насколько должно увеличиться отставание по
Слайд 1414
Рис. 10.9 АЧХ замкнутой системы
Анализ АФХ разомкнутой системы показывает, что, как
14
Рис. 10.9 АЧХ замкнутой системы
Анализ АФХ разомкнутой системы показывает, что, как
Слайд 1515
Рис. 10.10 Определение модуля АФХ
Если задан показатель колебательности, то задан запас
15
Рис. 10.10 Определение модуля АФХ
Если задан показатель колебательности, то задан запас
Слайд 1616
Анализ систем на запас устойчивости
Расширенные частотные характеристики
Амплитудно-фазовая характеристика является конформным отображением
16
Анализ систем на запас устойчивости
Расширенные частотные характеристики
Амплитудно-фазовая характеристика является конформным отображением
Слайд 1717
Рис. 10.12 Расширенная частотная характеристика по степени устойчивости:
а – плоскость корней характеристического
17
Рис. 10.12 Расширенная частотная характеристика по степени устойчивости:
а – плоскость корней характеристического
Слайд 18 Отображение этой границы на плоскости АФХ и дает годограф расширенной амплитудно-фазовой
Отображение этой границы на плоскости АФХ и дает годограф расширенной амплитудно-фазовой
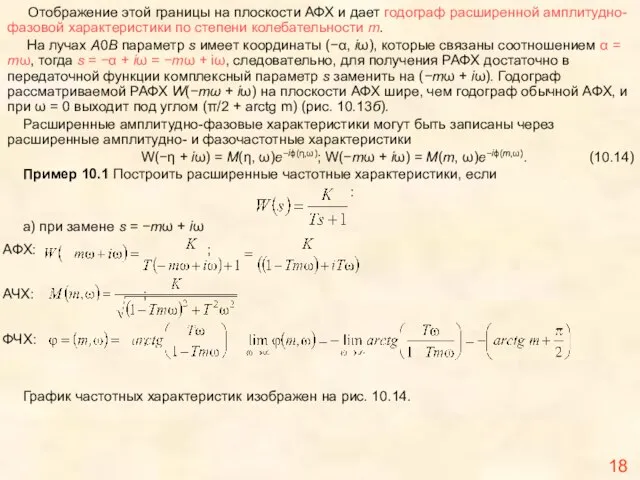
Слайд 19Рис. 10.14 Расширенные частотные характеристики: а − АЧХ; б − ФЧХ; в
Рис. 10.14 Расширенные частотные характеристики: а − АЧХ; б − ФЧХ; в
 Концепция создания конкурентной среды в сфере обязательного медицинского страхования
Концепция создания конкурентной среды в сфере обязательного медицинского страхования Презентация на тему Репродуктивные органы растений
Презентация на тему Репродуктивные органы растений  Зачем необходимо кушать по утрам?
Зачем необходимо кушать по утрам? Мультимедийные презентации
Мультимедийные презентации Гражданско-правовые договоры на примере договоров поставки и подряда
Гражданско-правовые договоры на примере договоров поставки и подряда Полезная модель
Полезная модель Интернет-журналистика
Интернет-журналистика Профсоюз и рынок труда
Профсоюз и рынок труда Педагогика
Педагогика Видеоигры как искусство
Видеоигры как искусство Социальный диалог в Украине в условиях кризиса
Социальный диалог в Украине в условиях кризиса Презентация на тему МАГНИТНОЕ ПОЛЕ
Презентация на тему МАГНИТНОЕ ПОЛЕ  Жизнь Т.Н. Баклановой
Жизнь Т.Н. Баклановой Приглашаем к знакомству с Кузбасской православной духовной семинарией
Приглашаем к знакомству с Кузбасской православной духовной семинарией Овощи. Фрукты. Напитки
Овощи. Фрукты. Напитки Сдаем нормы ГТО
Сдаем нормы ГТО Презентация на тему Амфотерные оксиды и гидроксиды
Презентация на тему Амфотерные оксиды и гидроксиды Ораторское мастерство и искусство публичных выступлений
Ораторское мастерство и искусство публичных выступлений Физические качества
Физические качества Способы оплаты дополнительных платных услуг
Способы оплаты дополнительных платных услуг Социальные права человека
Социальные права человека Подготовка публичного выступления
Подготовка публичного выступления Презентация на тему Строение Атома
Презентация на тему Строение Атома  ВИДЫ И ТИПЫ ТЕСТОВЫХ ЗАДАНИЙ
ВИДЫ И ТИПЫ ТЕСТОВЫХ ЗАДАНИЙ Презентация на тему Владимир Владимирович Маяковский
Презентация на тему Владимир Владимирович Маяковский Формирование ключевых компетенций предмета географии средствами инновационных технологий
Формирование ключевых компетенций предмета географии средствами инновационных технологий Ремонт корпуса судна
Ремонт корпуса судна Конструкционные машиностроительные материалы
Конструкционные машиностроительные материалы