- Основы автоматики и системы автоматического управления

Содержание
- 2. Часть 1. Основы теории линейных непрерывных САУ. 1.1. Математические модели САУ. 3-37 1.2. Типовые звенья САУ
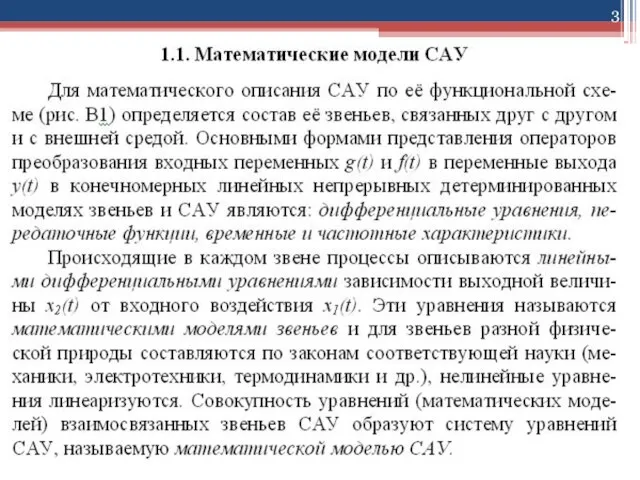
- 5. Для описания математической модели САУ обычно используется три способа: 1) поэлементное описание САУ с учётом взаимодействия
- 6. Для описания математической модели САУ обычно используется три способа: 2) системное описание САУ представляется одним уравнением,
- 7. Для описания математической модели САУ обычно используется три способа: 3) векторно-матричное описание САУ в пространстве переменных
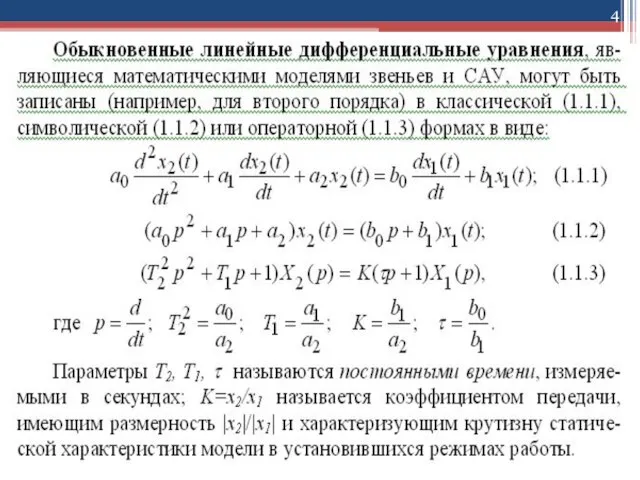
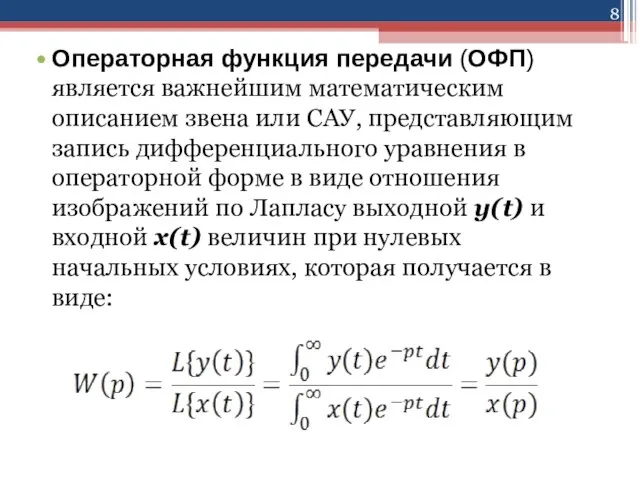
- 8. Операторная функция передачи (ОФП) является важнейшим математическим описанием звена или САУ, представляющим запись дифференциального уравнения в
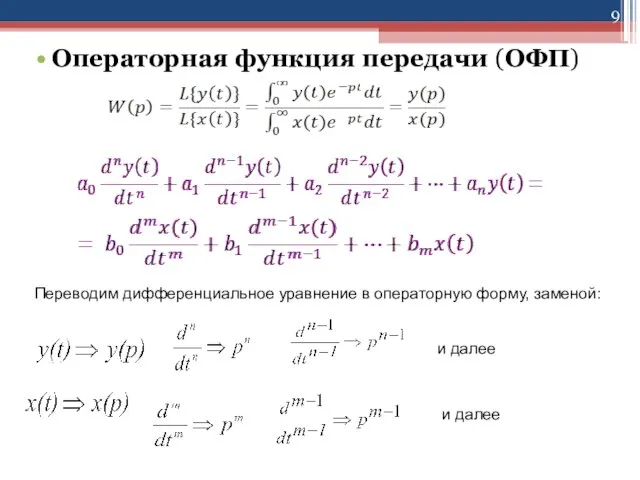
- 9. Операторная функция передачи (ОФП) Переводим дифференциальное уравнение в операторную форму, заменой: и далее и далее
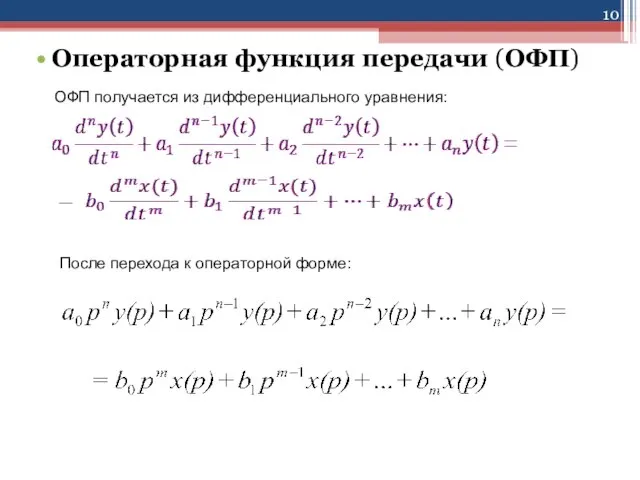
- 10. Операторная функция передачи (ОФП) ОФП получается из дифференциального уравнения: После перехода к операторной форме:
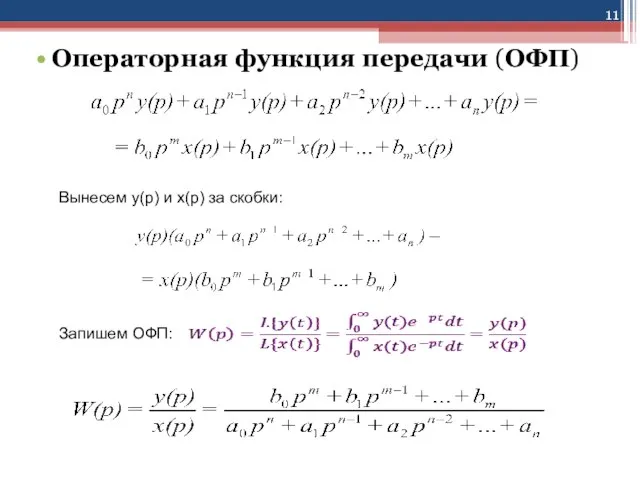
- 11. Операторная функция передачи (ОФП) Вынесем y(p) и x(p) за скобки: Запишем ОФП:
- 12. ВРЕМЕННЫМИ ХАРАКТЕРИСТИКАМИ звена или САУ являются переходная функция h(t) и функция веса w(t) Переходной функцией (переходной
- 13. Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции δ(t)=d1[t]/dt, при этом δ(t)=0 в любой
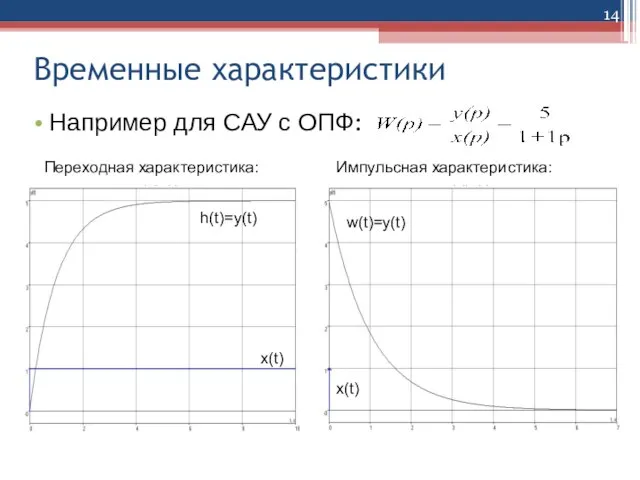
- 14. Временные характеристики Например для САУ с ОПФ: Переходная характеристика: Импульсная характеристика: x(t) x(t) h(t)=y(t) w(t)=y(t)
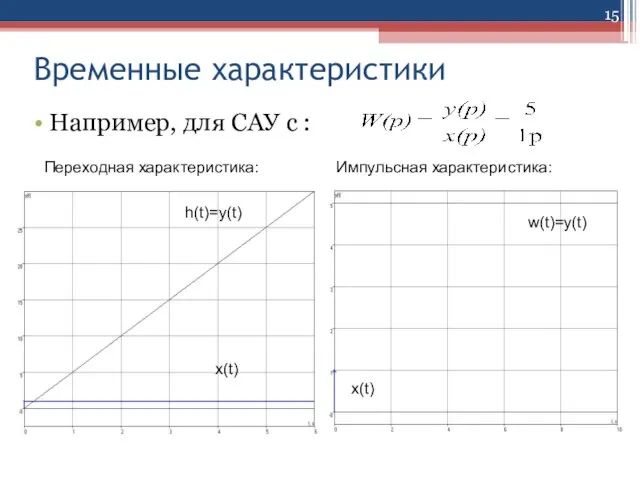
- 15. Временные характеристики Например, для САУ с : Переходная характеристика: Импульсная характеристика: x(t) h(t)=y(t) x(t) w(t)=y(t)
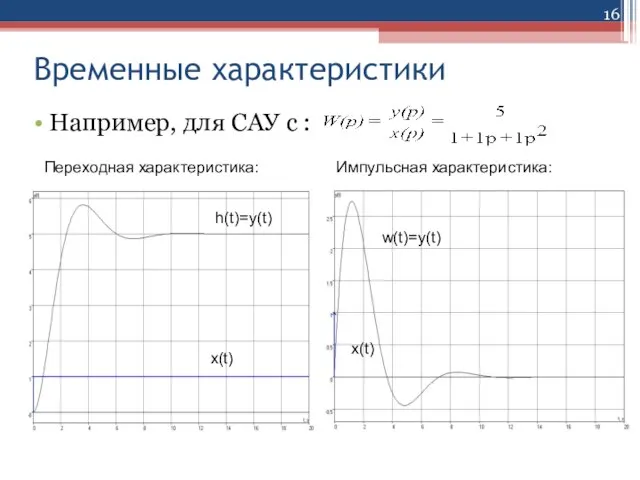
- 16. Временные характеристики Например, для САУ с : Переходная характеристика: Импульсная характеристика: x(t) w(t)=y(t) x(t) h(t)=y(t)
- 17. Частотные характеристики Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала звена или системы в
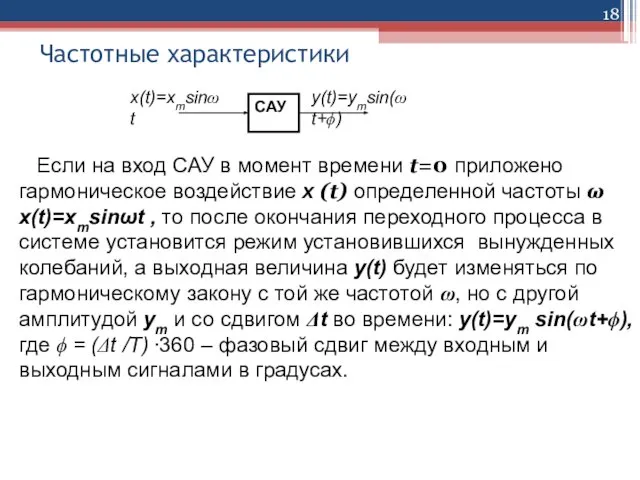
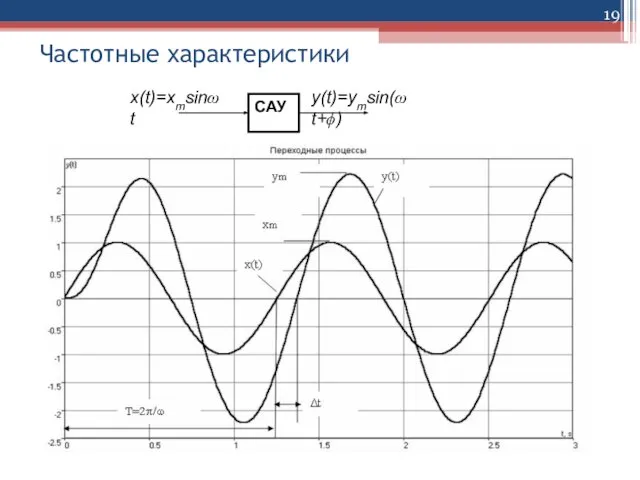
- 18. Частотные характеристики Если на вход САУ в момент времени t=0 приложено гармоническое воздействие x (t) определенной
- 19. Частотные характеристики
- 20. Частотные характеристики Изменяя частоту входного сигнала ω от 0 до ∝ при постоянном значении амплитуды xm,
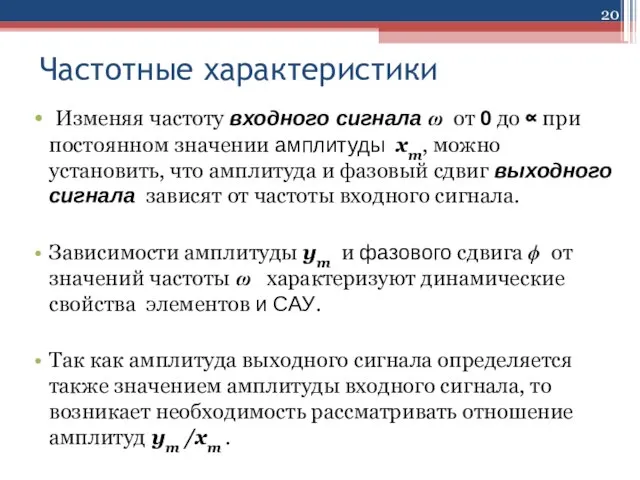
- 21. Частотные характеристики Зависимость отношения амплитуд выходного и входного сигнала от частоты называют амплитудной частотной характеристикой (АЧХ)
- 22. Частотные характеристики
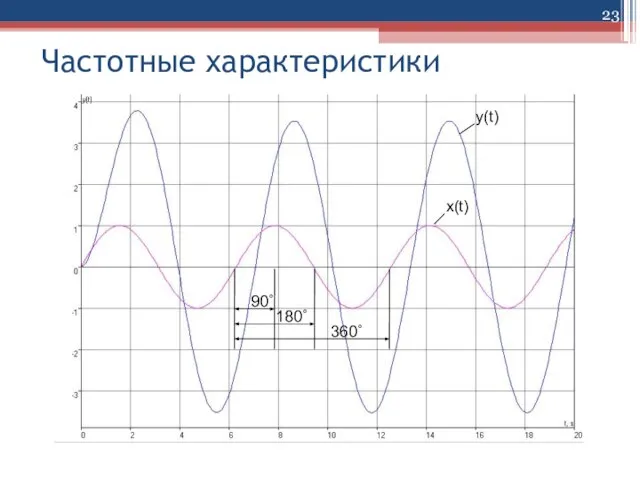
- 23. Частотные характеристики y(t) x(t) 360˚ 180˚ 90˚
- 24. Частотные характеристики Амплитудно-фазовая характеристика (АФХ) (частотная передаточная функция, комплексный передачи) W(jω) звена или САУ получается из
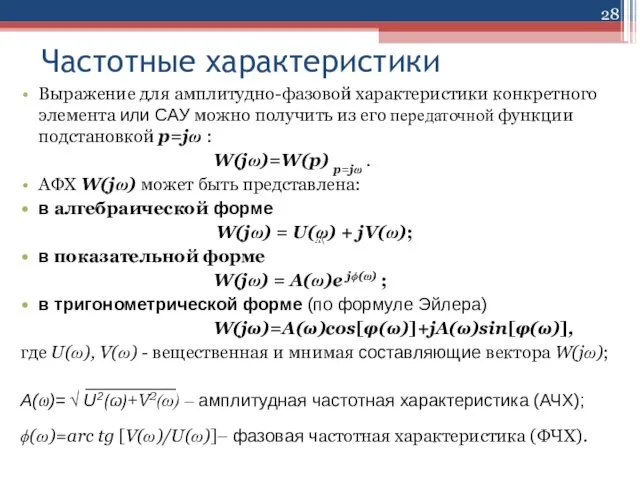
- 25. Частотные характеристики Амплитудно-фазовая частотная характеристика W(jω)=U(ω)+jV(ω)=А(ω)е jφ(ω) является функцией комплексного переменного jω. Каждому значению частоты ωi
- 26. Частотные характеристики
- 27. Частотные характеристики
- 28. Частотные характеристики Выражение для амплитудно-фазовой характеристики конкретного элемента или САУ можно получить из его передаточной функции
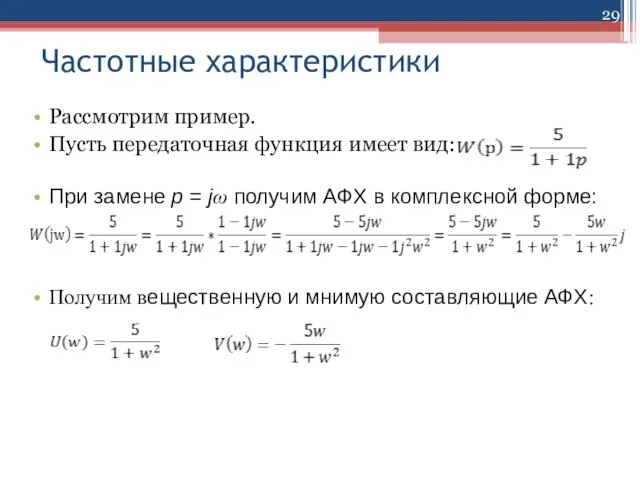
- 29. Частотные характеристики Рассмотрим пример. Пусть передаточная функция имеет вид: При замене p = jω получим АФХ
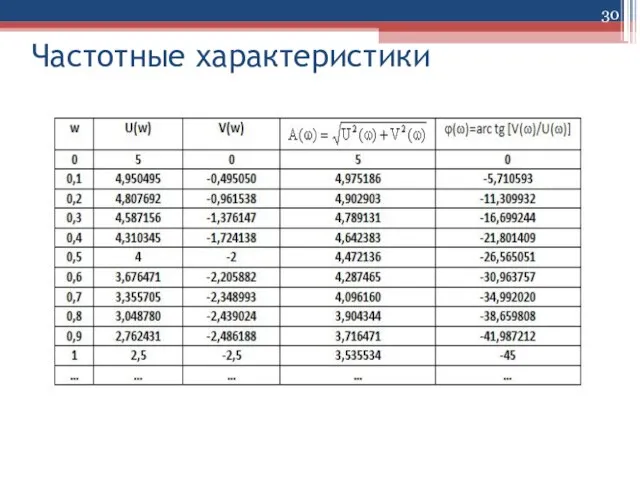
- 30. Частотные характеристики
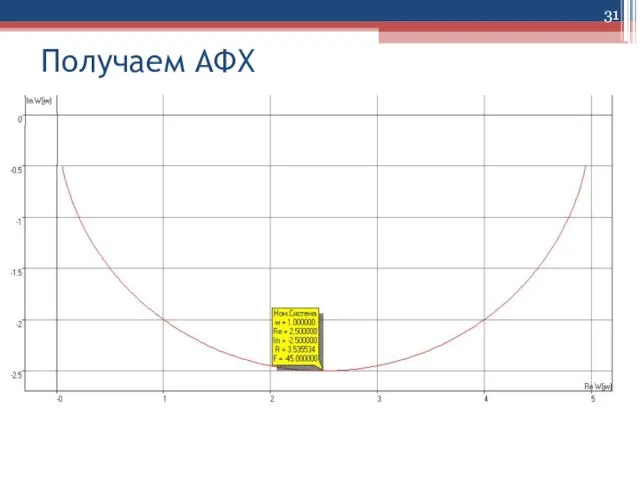
- 31. Получаем АФХ
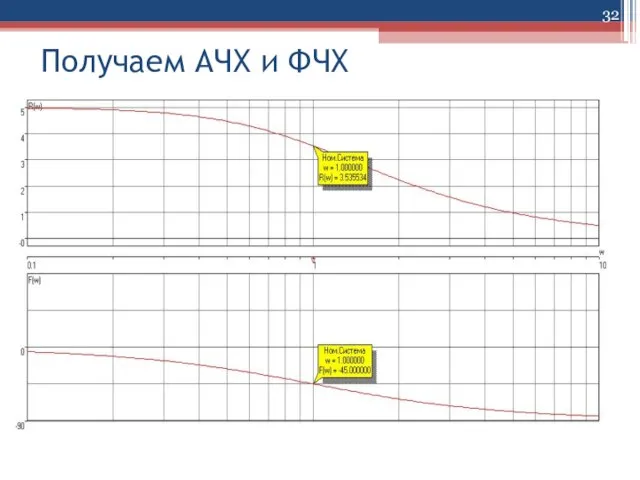
- 32. Получаем АЧХ и ФЧХ
- 33. Частотные характеристики В расчетах САУ широко используются логарифмические частотные характеристики. Логарифмическая амплитудная частотная характеристика (ЛАЧХ) звена
- 34. Частотные характеристики Децибел равен 1/10 бела. Бел равен десятичному логарифму отношения мощностей на выходе и входе
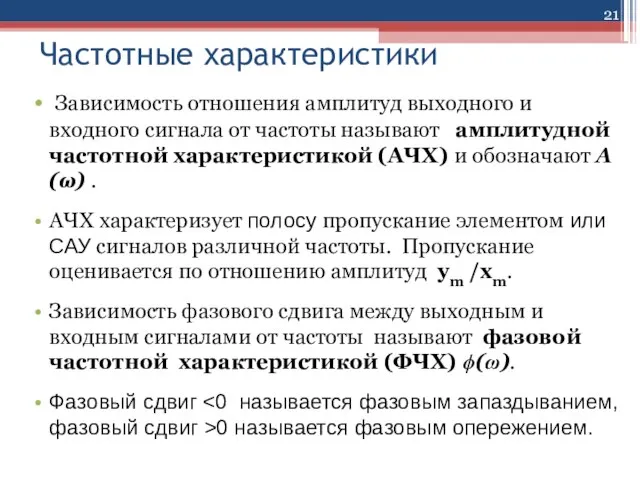
- 35. Частотные характеристики Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится по оси ординат в
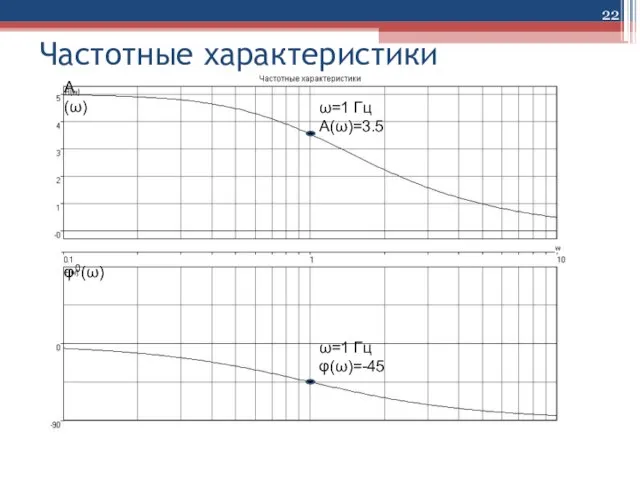
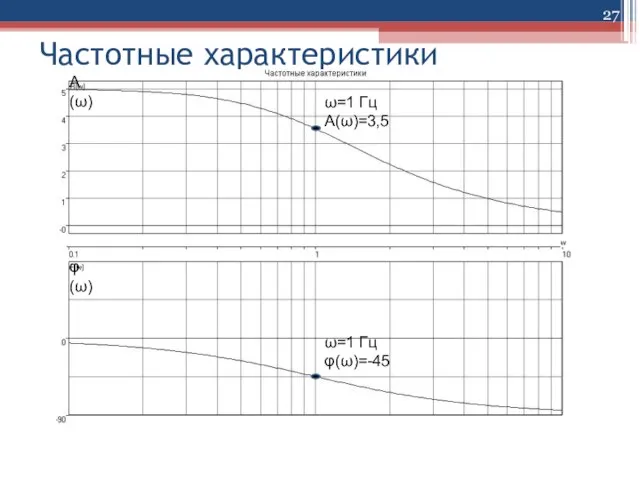
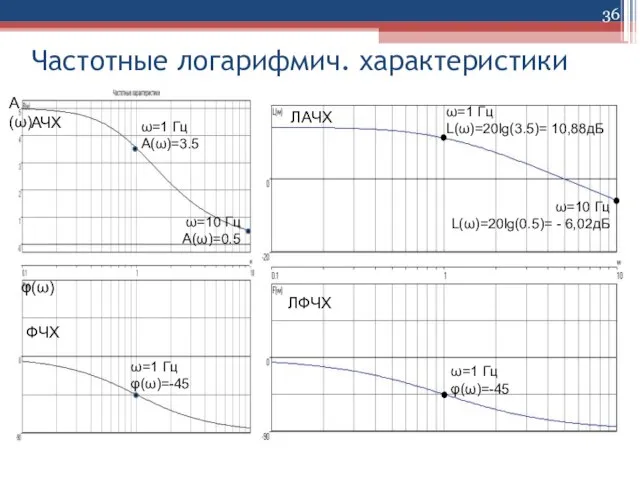
- 36. Частотные логарифмич. характеристики ω=1 Гц L(ω)=20lg(3.5)= 10,88дБ
- 38. 1.2. Типовые звенья САУ и их характеристики Звенья с математическим описанием обыкновенными дифференциальными уравнениями первого и
- 39. 1.2. Типовые звенья САУ и их характеристики Классификацию типовых звеньев удобно осуществить, рассматривая различные частные случаи
- 40. 1.2. Типовые звенья САУ и их характеристики Вынесем x(p) и y(p) за скобки: Передаточная функция в
- 41. 1.2. Типовые звенья САУ и их характеристики Принято уравнение: записывать в виде (разделив на ): где
- 42. 1.2. Типовые звенья САУ и их характеристики Передаточная функция из уравнения: в общем виде для типовых
- 43. Типовые динамические звенья делятся по зависимостям выходной величины y от входного воздействия x в установившихся режимах
- 44. 1.2. Типовые звенья САУ и их характеристики Пример:
- 45. 1.2. Типовые звенья САУ и их характеристики Пример:
- 46. 1.2. Типовые звенья САУ и их характеристики Рассмотрим методику получения временных и частотных характеристик на примере
- 47. 1.2. Типовые звенья САУ и их характеристики Переходная функция звена h(t)=y(t) получается в виде суммы общего
- 48. 1.2. Типовые звенья САУ и их характеристики Весовая функция звена определяется дифференцированием h(t) по времени:
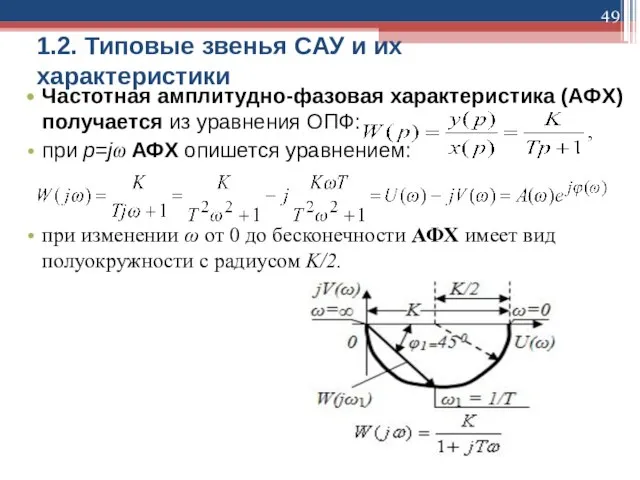
- 49. 1.2. Типовые звенья САУ и их характеристики Частотная амплитудно-фазовая характеристика (АФХ) получается из уравнения ОПФ: при
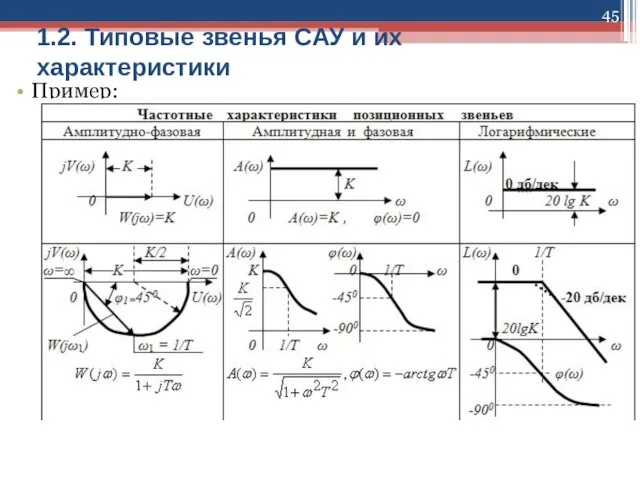
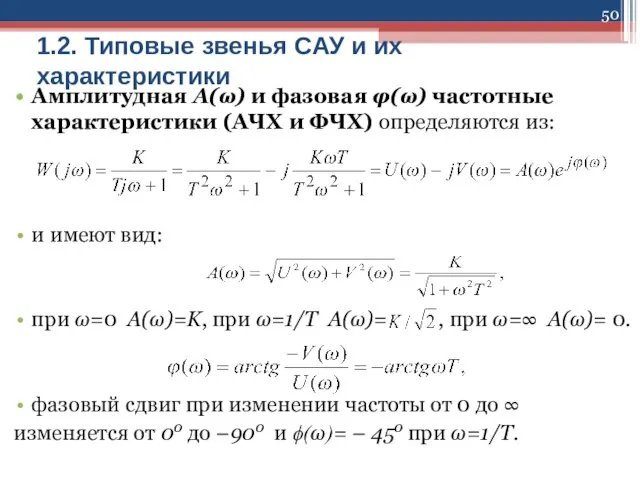
- 50. 1.2. Типовые звенья САУ и их характеристики Амплитудная А(ω) и фазовая φ(ω) частотные характеристики (АЧХ и
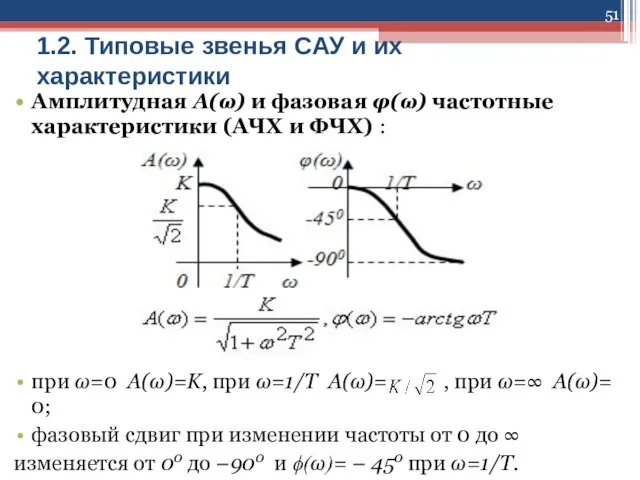
- 51. 1.2. Типовые звенья САУ и их характеристики Амплитудная А(ω) и фазовая φ(ω) частотные характеристики (АЧХ и
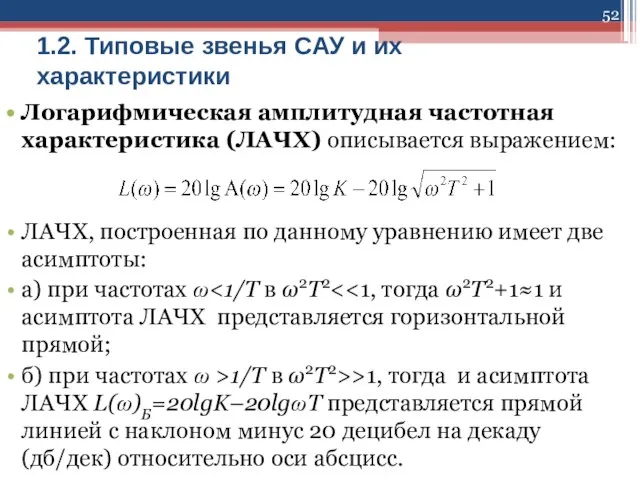
- 52. 1.2. Типовые звенья САУ и их характеристики Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается выражением: ЛАЧХ, построенная
- 53. 1.2. Типовые звенья САУ и их характеристики Эти асимптоты сопрягаются при частоте сопряжения ωС=1/T, при этой
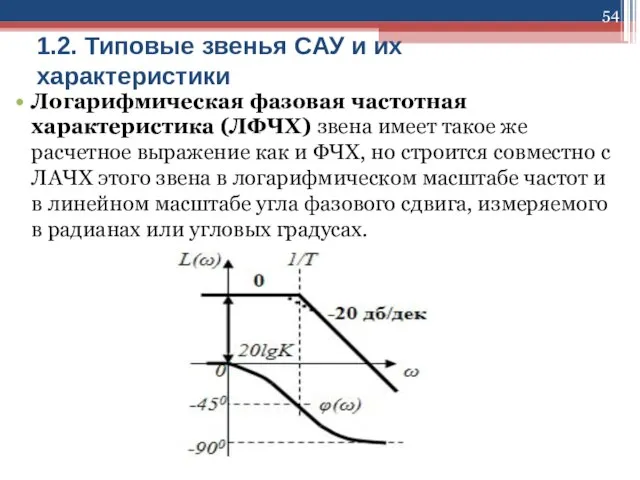
- 54. 1.2. Типовые звенья САУ и их характеристики Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена имеет такое же
- 55. 1.2. Типовые звенья САУ и их характеристики Аналогичным путем получаются временные и частотные характеристики других типовых
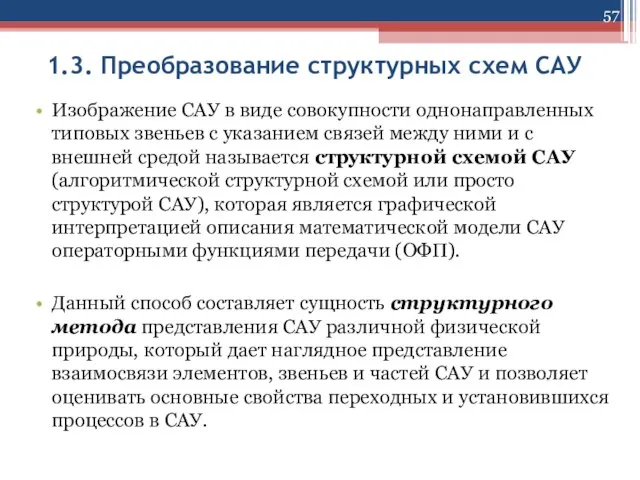
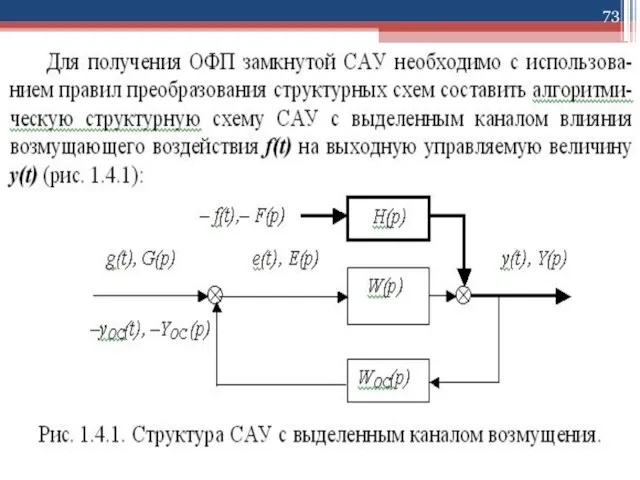
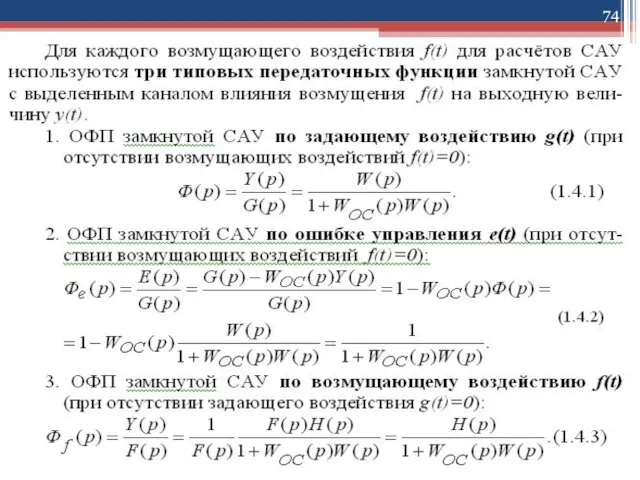
- 57. 1.3. Преобразование структурных схем САУ Изображение САУ в виде совокупности однонаправленных типовых звеньев с указанием связей
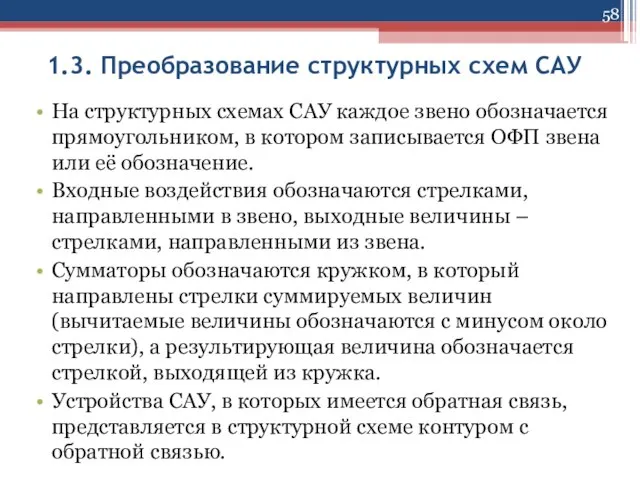
- 58. 1.3. Преобразование структурных схем САУ На структурных схемах САУ каждое звено обозначается прямоугольником, в котором записывается
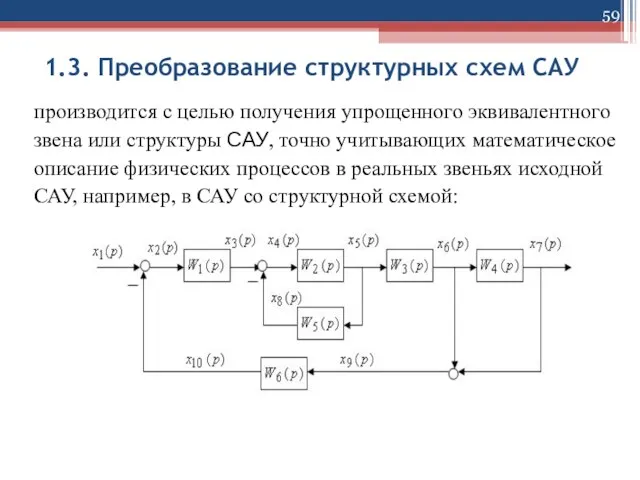
- 59. 1.3. Преобразование структурных схем САУ производится с целью получения упрощенного эквивалентного звена или структуры САУ, точно
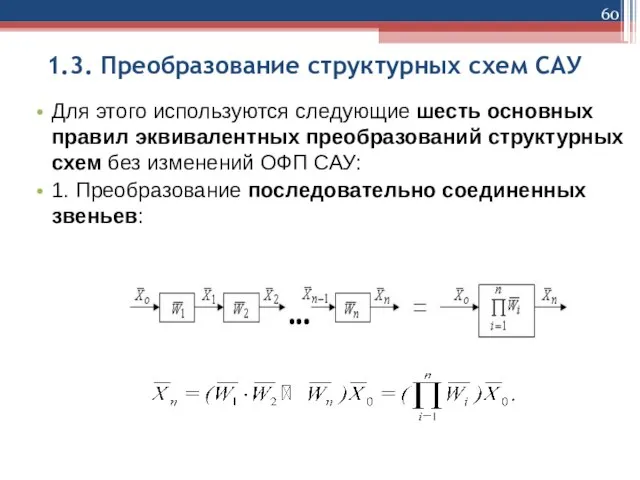
- 60. 1.3. Преобразование структурных схем САУ Для этого используются следующие шесть основных правил эквивалентных преобразований структурных схем
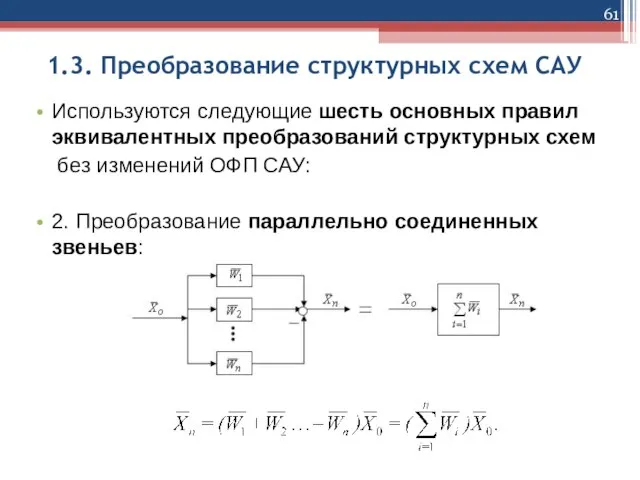
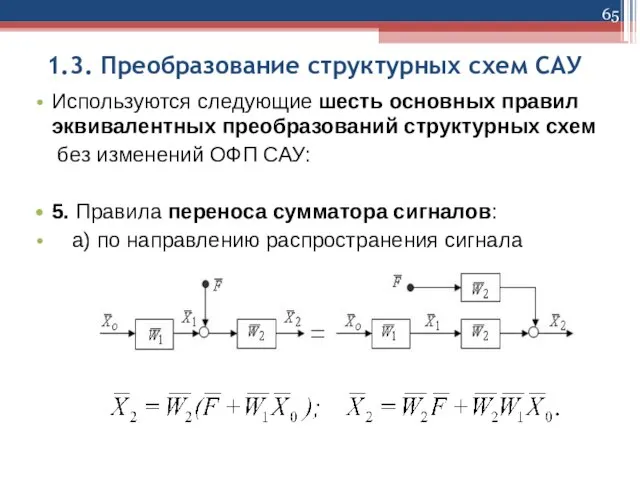
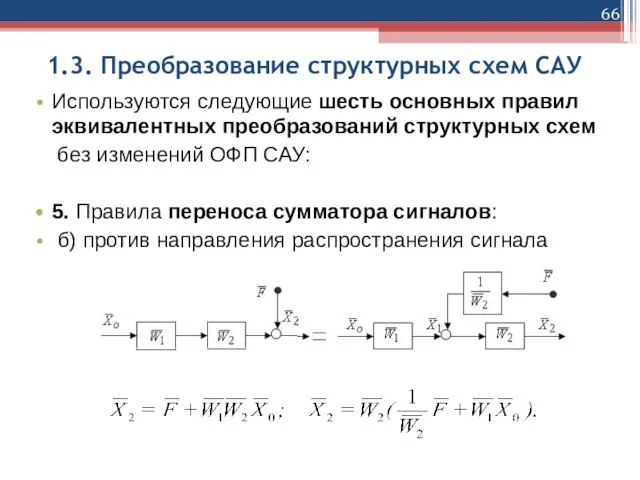
- 61. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
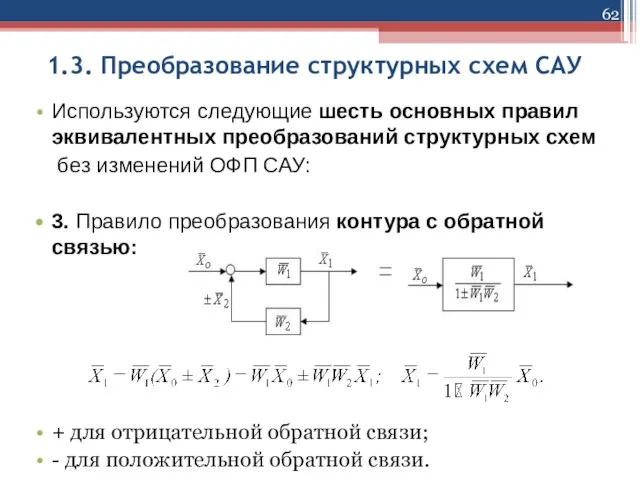
- 62. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
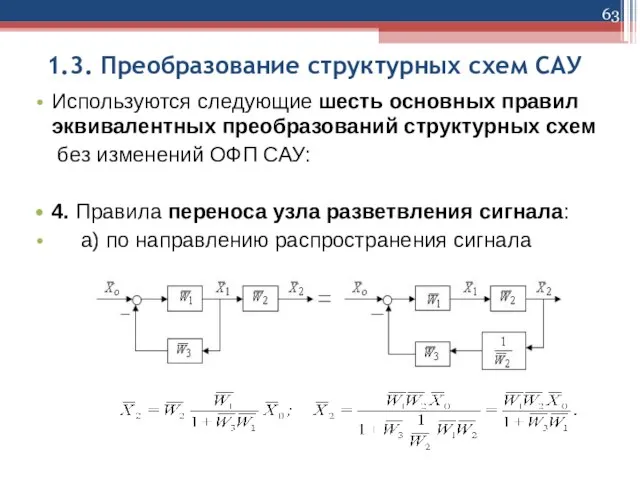
- 63. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
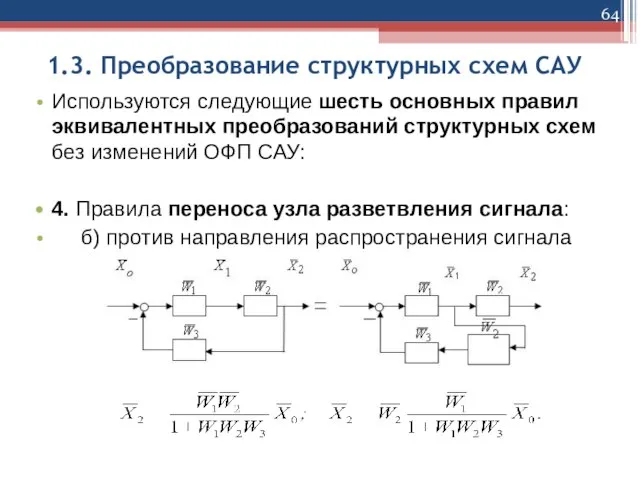
- 64. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
- 65. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
- 66. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
- 67. 1.3. Преобразование структурных схем САУ Используются следующие шесть основных правил эквивалентных преобразований структурных схем без изменений
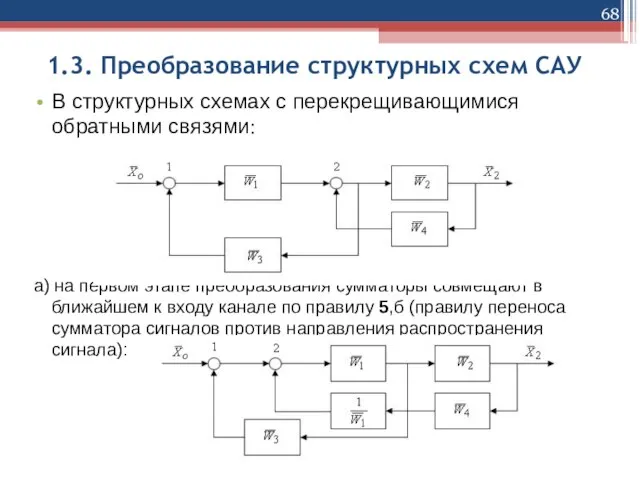
- 68. 1.3. Преобразование структурных схем САУ В структурных схемах с перекрещивающимися обратными связями: а) на первом этапе
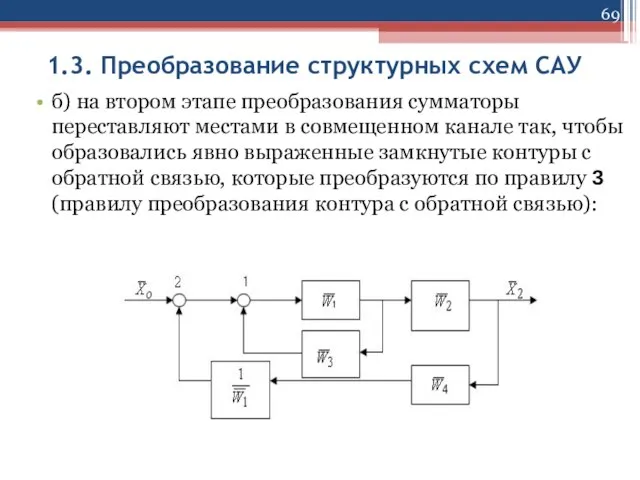
- 69. 1.3. Преобразование структурных схем САУ б) на втором этапе преобразования сумматоры переставляют местами в совмещенном канале
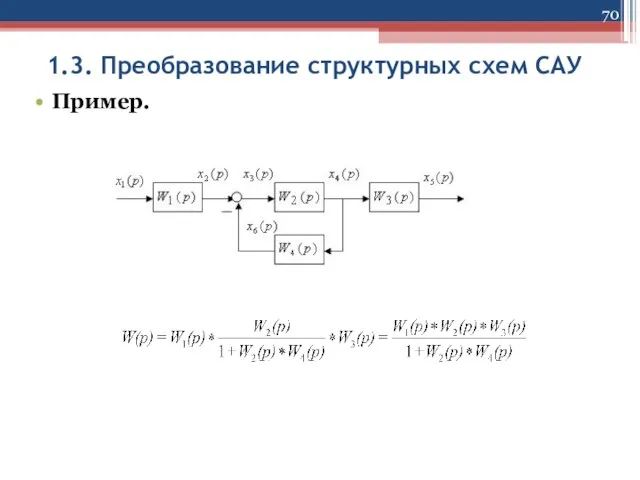
- 70. 1.3. Преобразование структурных схем САУ Пример.
- 76. Скачать презентацию
Слайд 5 Для описания математической модели САУ обычно используется три способа:
1) поэлементное описание САУ
Для описания математической модели САУ обычно используется три способа:
1) поэлементное описание САУ
Слайд 6 Для описания математической модели САУ обычно используется три способа:
2) системное описание САУ
Для описания математической модели САУ обычно используется три способа:
2) системное описание САУ
Слайд 7 Для описания математической модели САУ обычно используется три способа:
3) векторно-матричное описание САУ
Для описания математической модели САУ обычно используется три способа:
3) векторно-матричное описание САУ
Слайд 8Операторная функция передачи (ОФП) является важнейшим математическим описанием звена или САУ, представляющим
Операторная функция передачи (ОФП) является важнейшим математическим описанием звена или САУ, представляющим
Слайд 9Операторная функция передачи (ОФП)
Переводим дифференциальное уравнение в операторную форму, заменой:
и далее
и
Операторная функция передачи (ОФП)
Переводим дифференциальное уравнение в операторную форму, заменой:
и далее
и
Слайд 10Операторная функция передачи (ОФП)
ОФП получается из дифференциального уравнения:
После перехода к операторной
Операторная функция передачи (ОФП)
ОФП получается из дифференциального уравнения:
После перехода к операторной
Слайд 11Операторная функция передачи (ОФП)
Вынесем y(p) и x(p) за скобки:
Запишем ОФП:
Операторная функция передачи (ОФП)
Вынесем y(p) и x(p) за скобки:
Запишем ОФП:
Слайд 12ВРЕМЕННЫМИ ХАРАКТЕРИСТИКАМИ звена или САУ являются переходная функция h(t) и функция веса
ВРЕМЕННЫМИ ХАРАКТЕРИСТИКАМИ звена или САУ являются переходная функция h(t) и функция веса
Слайд 13Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции δ(t)=d1[t]/dt, при
Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции δ(t)=d1[t]/dt, при
![Дельта-функция или функция Дирака получается при дифференцировании единичной ступенчатой функции δ(t)=d1[t]/dt, при](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/365520/slide-12.jpg)
Слайд 14Временные характеристики
Например для САУ с ОПФ:
Переходная характеристика:
Импульсная характеристика:
x(t)
x(t)
h(t)=y(t)
w(t)=y(t)
Временные характеристики
Например для САУ с ОПФ:
Переходная характеристика:
Импульсная характеристика:
x(t)
x(t)
h(t)=y(t)
w(t)=y(t)
Слайд 15Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
h(t)=y(t)
x(t)
w(t)=y(t)
Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
h(t)=y(t)
x(t)
w(t)=y(t)
Слайд 16Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
w(t)=y(t)
x(t)
h(t)=y(t)
Временные характеристики
Например, для САУ с :
Переходная характеристика:
Импульсная характеристика:
x(t)
w(t)=y(t)
x(t)
h(t)=y(t)
Слайд 17Частотные характеристики
Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала звена
Частотные характеристики
Частотные характеристики представляют собой зависимость амплитуды и фазы выходного сигнала звена
Слайд 18Частотные характеристики
Если на вход САУ в момент времени t=0 приложено гармоническое
Частотные характеристики
Если на вход САУ в момент времени t=0 приложено гармоническое
Слайд 19Частотные характеристики
Частотные характеристики
Слайд 20Частотные характеристики
Изменяя частоту входного сигнала ω от 0 до ∝ при
Частотные характеристики
Изменяя частоту входного сигнала ω от 0 до ∝ при
Слайд 21Частотные характеристики
Зависимость отношения амплитуд выходного и входного сигнала от частоты называют
Частотные характеристики
Зависимость отношения амплитуд выходного и входного сигнала от частоты называют
Слайд 22Частотные характеристики
Частотные характеристики
Слайд 23Частотные характеристики
y(t)
x(t)
360˚
180˚
90˚
Частотные характеристики
y(t)
x(t)
360˚
180˚
90˚
Слайд 24Частотные характеристики
Амплитудно-фазовая характеристика (АФХ) (частотная передаточная функция, комплексный передачи) W(jω) звена
Частотные характеристики
Амплитудно-фазовая характеристика (АФХ) (частотная передаточная функция, комплексный передачи) W(jω) звена
Слайд 25Частотные характеристики
Амплитудно-фазовая частотная характеристика W(jω)=U(ω)+jV(ω)=А(ω)е jφ(ω) является функцией комплексного переменного jω.
Каждому
Частотные характеристики
Амплитудно-фазовая частотная характеристика W(jω)=U(ω)+jV(ω)=А(ω)е jφ(ω) является функцией комплексного переменного jω.
Каждому
Слайд 26Частотные характеристики
Частотные характеристики

Слайд 27Частотные характеристики
Частотные характеристики
Слайд 28Частотные характеристики
Выражение для амплитудно-фазовой характеристики конкретного элемента или САУ можно получить из
Частотные характеристики
Выражение для амплитудно-фазовой характеристики конкретного элемента или САУ можно получить из
Слайд 29Частотные характеристики
Рассмотрим пример.
Пусть передаточная функция имеет вид:
При замене p = jω
Частотные характеристики
Рассмотрим пример.
Пусть передаточная функция имеет вид:
При замене p = jω
Слайд 30Частотные характеристики
Частотные характеристики
Слайд 31Получаем АФХ
Получаем АФХ
Слайд 32Получаем АЧХ и ФЧХ
Получаем АЧХ и ФЧХ
Слайд 33Частотные характеристики
В расчетах САУ широко используются логарифмические частотные характеристики.
Логарифмическая амплитудная частотная
Частотные характеристики
В расчетах САУ широко используются логарифмические частотные характеристики.
Логарифмическая амплитудная частотная
Слайд 34Частотные характеристики
Децибел равен 1/10 бела.
Бел равен десятичному логарифму отношения мощностей на выходе
Частотные характеристики
Децибел равен 1/10 бела.
Бел равен десятичному логарифму отношения мощностей на выходе
Слайд 35Частотные характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится по
Частотные характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится по
![Частотные характеристики Логарифмическая фазовая частотная характеристика (ЛФЧХ) φ(ω)=arctg[V(ω)/U(ω)] звена или САУ строится](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/365520/slide-34.jpg)
Слайд 36Частотные логарифмич. характеристики
ω=1 Гц
L(ω)=20lg(3.5)= 10,88дБ
Частотные логарифмич. характеристики
ω=1 Гц
L(ω)=20lg(3.5)= 10,88дБ
Слайд 381.2. Типовые звенья САУ и их характеристики
Звенья с математическим описанием обыкновенными
1.2. Типовые звенья САУ и их характеристики
Звенья с математическим описанием обыкновенными
Слайд 391.2. Типовые звенья САУ и их характеристики
Классификацию типовых звеньев удобно осуществить, рассматривая
1.2. Типовые звенья САУ и их характеристики
Классификацию типовых звеньев удобно осуществить, рассматривая
Слайд 401.2. Типовые звенья САУ и их характеристики
Вынесем x(p) и y(p) за скобки:
Передаточная
1.2. Типовые звенья САУ и их характеристики
Вынесем x(p) и y(p) за скобки:
Передаточная
Слайд 411.2. Типовые звенья САУ и их характеристики
Принято уравнение:
записывать в виде (разделив на
1.2. Типовые звенья САУ и их характеристики
Принято уравнение:
записывать в виде (разделив на
Слайд 421.2. Типовые звенья САУ и их характеристики
Передаточная функция из уравнения:
в общем виде
1.2. Типовые звенья САУ и их характеристики
Передаточная функция из уравнения:
в общем виде
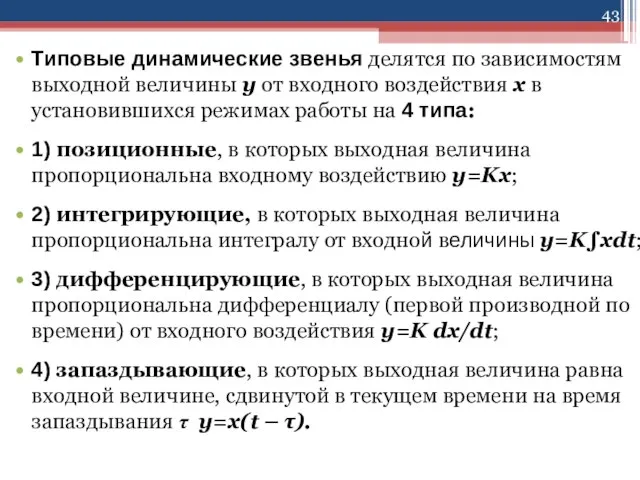
Слайд 43Типовые динамические звенья делятся по зависимостям выходной величины y от входного воздействия
Типовые динамические звенья делятся по зависимостям выходной величины y от входного воздействия
Слайд 441.2. Типовые звенья САУ и их характеристики
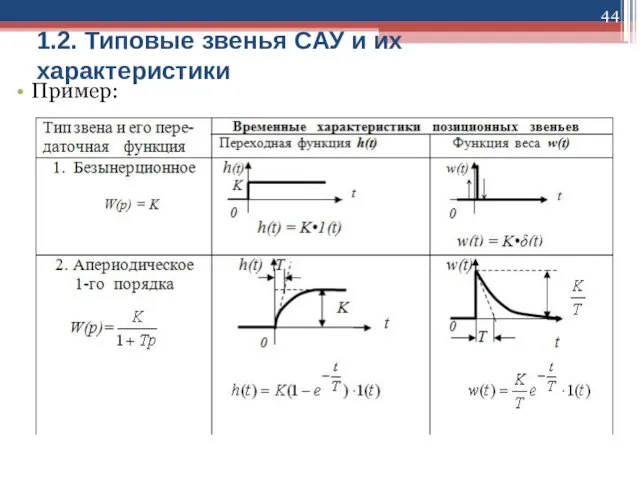
Пример:
1.2. Типовые звенья САУ и их характеристики
Пример:
Слайд 451.2. Типовые звенья САУ и их характеристики
Пример:
1.2. Типовые звенья САУ и их характеристики
Пример:
Слайд 461.2. Типовые звенья САУ и их характеристики
Рассмотрим методику получения временных и частотных
1.2. Типовые звенья САУ и их характеристики
Рассмотрим методику получения временных и частотных
Слайд 471.2. Типовые звенья САУ и их характеристики
Переходная функция звена h(t)=y(t) получается
1.2. Типовые звенья САУ и их характеристики
Переходная функция звена h(t)=y(t) получается
Слайд 481.2. Типовые звенья САУ и их характеристики
Весовая функция звена определяется
дифференцированием h(t)
1.2. Типовые звенья САУ и их характеристики
Весовая функция звена определяется
дифференцированием h(t)
Слайд 491.2. Типовые звенья САУ и их характеристики
Частотная амплитудно-фазовая характеристика (АФХ) получается из
1.2. Типовые звенья САУ и их характеристики
Частотная амплитудно-фазовая характеристика (АФХ) получается из
Слайд 501.2. Типовые звенья САУ и их характеристики
Амплитудная А(ω) и фазовая φ(ω) частотные
1.2. Типовые звенья САУ и их характеристики
Амплитудная А(ω) и фазовая φ(ω) частотные
Слайд 511.2. Типовые звенья САУ и их характеристики
Амплитудная А(ω) и фазовая φ(ω) частотные
1.2. Типовые звенья САУ и их характеристики
Амплитудная А(ω) и фазовая φ(ω) частотные
Слайд 521.2. Типовые звенья САУ и их характеристики
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается
1.2. Типовые звенья САУ и их характеристики
Логарифмическая амплитудная частотная характеристика (ЛАЧХ) описывается
Слайд 531.2. Типовые звенья САУ и их характеристики
Эти асимптоты сопрягаются при частоте сопряжения
1.2. Типовые звенья САУ и их характеристики
Эти асимптоты сопрягаются при частоте сопряжения
Слайд 541.2. Типовые звенья САУ и их характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена
1.2. Типовые звенья САУ и их характеристики
Логарифмическая фазовая частотная характеристика (ЛФЧХ) звена
Слайд 551.2. Типовые звенья САУ и их характеристики
Аналогичным путем получаются временные и частотные
1.2. Типовые звенья САУ и их характеристики
Аналогичным путем получаются временные и частотные
Слайд 571.3. Преобразование структурных схем САУ
Изображение САУ в виде совокупности однонаправленных типовых звеньев
1.3. Преобразование структурных схем САУ
Изображение САУ в виде совокупности однонаправленных типовых звеньев
Слайд 581.3. Преобразование структурных схем САУ
На структурных схемах САУ каждое звено обозначается прямоугольником,
1.3. Преобразование структурных схем САУ
На структурных схемах САУ каждое звено обозначается прямоугольником,
Слайд 591.3. Преобразование структурных схем САУ
производится с целью получения упрощенного эквивалентного
звена или
1.3. Преобразование структурных схем САУ
производится с целью получения упрощенного эквивалентного
звена или
Слайд 601.3. Преобразование структурных схем САУ
Для этого используются следующие шесть основных правил эквивалентных
1.3. Преобразование структурных схем САУ
Для этого используются следующие шесть основных правил эквивалентных
Слайд 611.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 621.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 631.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 641.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 651.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 661.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 671.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
1.3. Преобразование структурных схем САУ
Используются следующие шесть основных правил эквивалентных преобразований структурных
Слайд 681.3. Преобразование структурных схем САУ
В структурных схемах с перекрещивающимися обратными связями:
а) на
1.3. Преобразование структурных схем САУ
В структурных схемах с перекрещивающимися обратными связями:
а) на
Слайд 691.3. Преобразование структурных схем САУ
б) на втором этапе преобразования сумматоры переставляют местами
1.3. Преобразование структурных схем САУ
б) на втором этапе преобразования сумматоры переставляют местами
Слайд 701.3. Преобразование структурных схем САУ
Пример.
1.3. Преобразование структурных схем САУ
Пример.
 Реклама во Франции. Глазкова 22.04.2019
Реклама во Франции. Глазкова 22.04.2019 ПРЕЗЕНТАЦИЯ КУРСОВОЙ
ПРЕЗЕНТАЦИЯ КУРСОВОЙ Как я провела этот год
Как я провела этот год Препараты гормонов, их синтетических заменителей
Препараты гормонов, их синтетических заменителей  Ценим Ваше время!
Ценим Ваше время! Балльно-рейтинговая система на Образовательном портале ОмГПУ
Балльно-рейтинговая система на Образовательном портале ОмГПУ Описание системы
Описание системы ИЗМЕНЕНИЯ В ПЛАНЕ РАЗВИТИЯ 2011 Для Агентов Казахстана.
ИЗМЕНЕНИЯ В ПЛАНЕ РАЗВИТИЯ 2011 Для Агентов Казахстана. Преобразование вида и состава изображений. Графическая работа
Преобразование вида и состава изображений. Графическая работа Создание презентаций
Создание презентаций Школа родительского мастерства. Решение конфликтов
Школа родительского мастерства. Решение конфликтов БАНКОВСКИЙ СЕКТОР НА ФОНДОВОМ РЫНКЕ РФ
БАНКОВСКИЙ СЕКТОР НА ФОНДОВОМ РЫНКЕ РФ Схема микроразмножения
Схема микроразмножения Трансакционные издержки
Трансакционные издержки Строительная геотехнология
Строительная геотехнология ОПЫТ ВНЕДРЕНИЯ ИНДУСТРИАЛЬНОЙ МОДЕЛИ УПРАВЛЕНИЯ КАЧЕСТВОМ МЕДИЦИНСКОЙ ПОМОЩИВ МНОГОПРОФИЛЬНОЙ БОЛЬНИЦЕ (антикризисное управле
ОПЫТ ВНЕДРЕНИЯ ИНДУСТРИАЛЬНОЙ МОДЕЛИ УПРАВЛЕНИЯ КАЧЕСТВОМ МЕДИЦИНСКОЙ ПОМОЩИВ МНОГОПРОФИЛЬНОЙ БОЛЬНИЦЕ (антикризисное управле Первые русские князья
Первые русские князья Лекция на тему: Физиологические основы применения азотных удобрений
Лекция на тему: Физиологические основы применения азотных удобрений Корпоративная социальная ответственность как основа надежного бренда на примере компании «Балтика»
Корпоративная социальная ответственность как основа надежного бренда на примере компании «Балтика» Пасха Красная
Пасха Красная Астафьев «Капалуха»
Астафьев «Капалуха» Развитие коммуникативной культуры учащихся на уроках немецкого языка и во внеклассной работе.
Развитие коммуникативной культуры учащихся на уроках немецкого языка и во внеклассной работе. Рождение феодального общества у древних славян.
Рождение феодального общества у древних славян. Ержан ағай слайд дайын
Ержан ағай слайд дайын Имя освещает жизненный путь человека
Имя освещает жизненный путь человека Общественное здоровье и организация здравоохранения
Общественное здоровье и организация здравоохранения  Породы Собак
Породы Собак 209n-изменение косгу
209n-изменение косгу