- Презентация на тему Динамика Сила тяжести и вес

Содержание
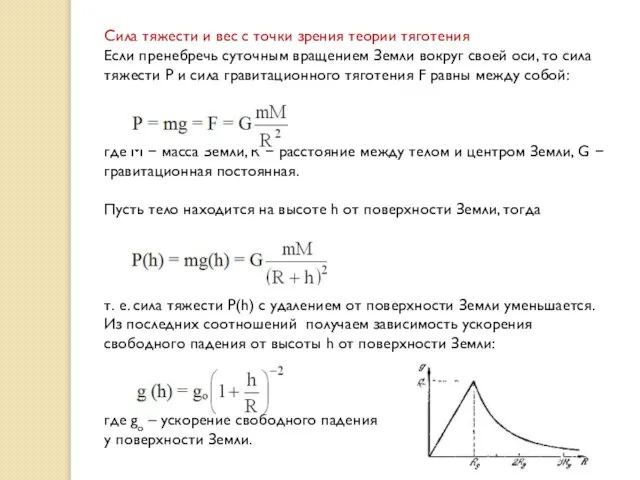
- 2. Сила тяжести и вес с точки зрения теории тяготения Если пренебречь суточным вращением Земли вокруг своей
- 3. В физике применяется также понятие веса тела. Весом тела называют силу, с которой тело действует на
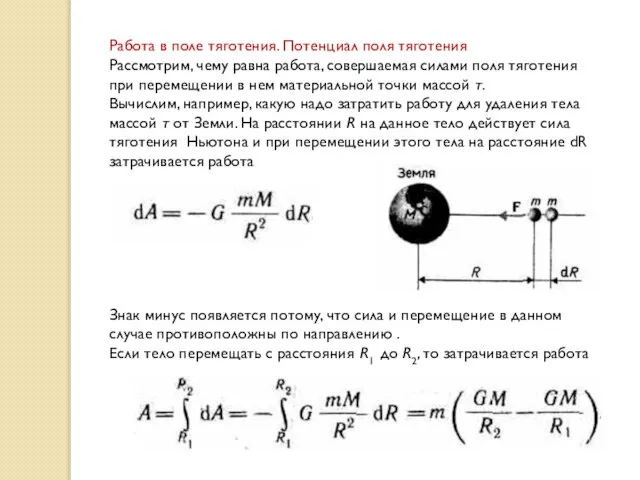
- 4. Работа в поле тяготения. Потенциал поля тяготения Рассмотрим, чему равна работа, совершаемая силами поля тяготения при
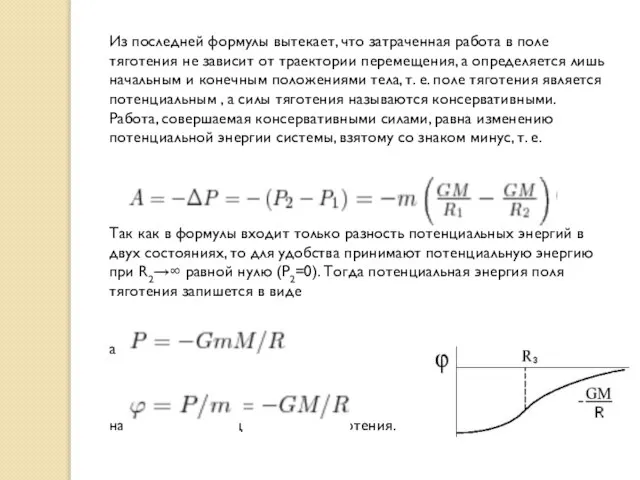
- 5. Из последней формулы вытекает, что затраченная работа в поле тяготения не зависит от траектории перемещения, а
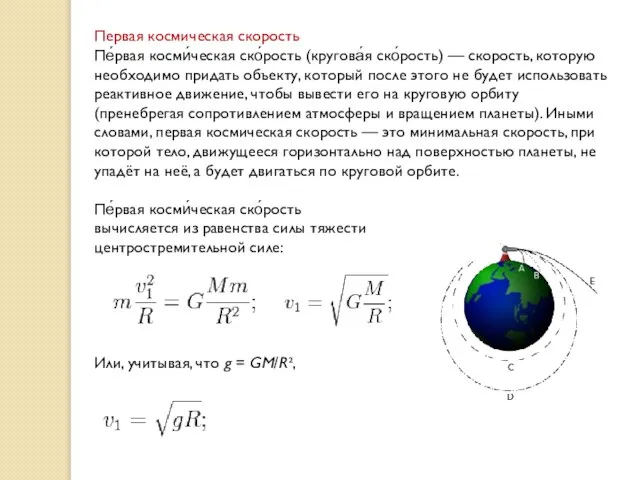
- 6. Первая космическая скорость Пе́рвая косми́ческая ско́рость (кругова́я ско́рость) — скорость, которую необходимо придать объекту, который после
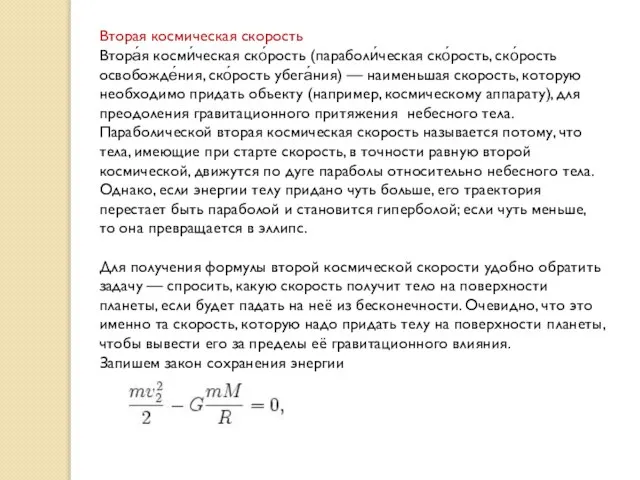
- 7. Вторая космическая скорость Втора́я косми́ческая ско́рость (параболи́ческая ско́рость, ско́рость освобожде́ния, ско́рость убега́ния) — наименьшая скорость, которую
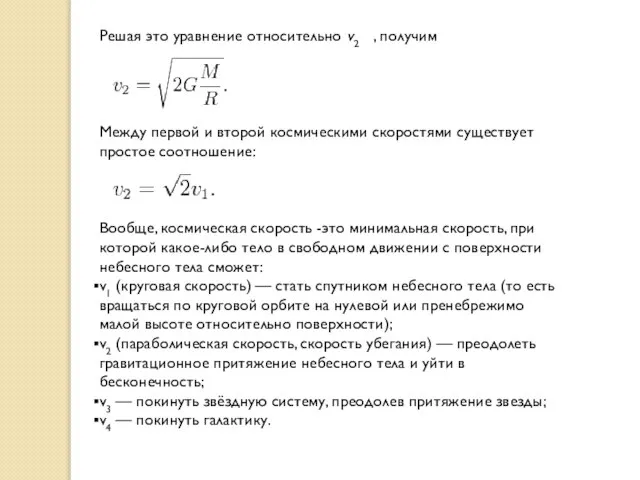
- 8. Решая это уравнение относительно v2 , получим Между первой и второй космическими скоростями существует простое соотношение:
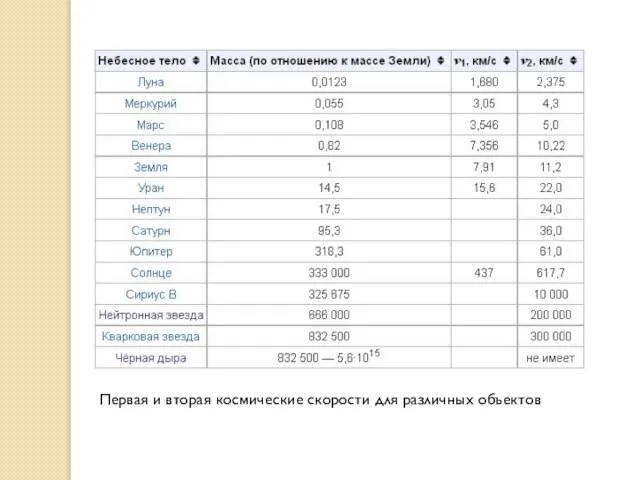
- 9. Первая и вторая космические скорости для различных объектов
- 10. Задание 1 Космический корабль улетает от Земли. Как направлен вектор ускорения корабля в тот момент, когда
- 11. Задание 2 У поверхности Земли на космонавта действует сила тяготения 720 Н. Какая сила тяготения действует
- 12. Задание 3 Космонавт на Земле притягивается к ней с силой 700 Н. С какой приблизительно силой
- 13. Задание 4 Какова минимальная скорость падения метеорита на Луну? Решение Как следует из закона сохранения энергии,
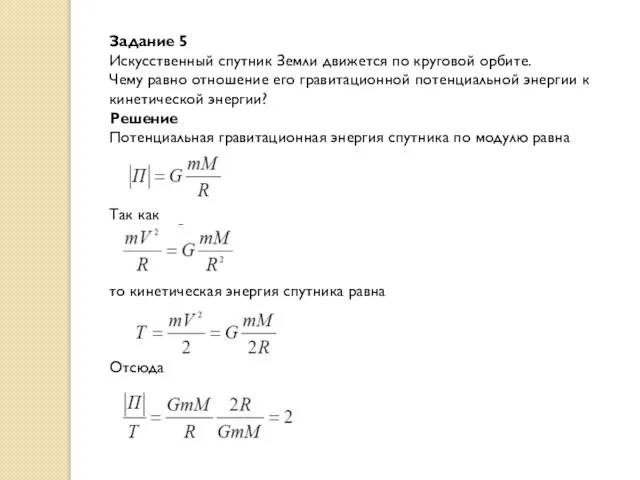
- 14. Задание 5 Искусственный спутник Земли движется по круговой орбите. Чему равно отношение его гравитационной потенциальной энергии
- 15. Физика падения бутерброда Распространено убеждение, что бутерброд практически всегда падает намазанной частью вниз (закон бутерброда или
- 16. Парадо́кс ко́шки с ма́слом - парадокс, основанный на двух народных мудростях: кошки всегда приземляются на лапы;
- 18. Законы сохранения Любое тело (или совокупность тел) представляет собой, по существу, систему материальных точек или частиц.
- 19. В связи с этим возникает вопрос: нет ли каких-либо общих принципов, являющихся следствием законов Ньютона, которые
- 20. Законы сохранения энергии, импульса и момента импульса связаны с фундаментальными свойствами времени и пространства. Закон сохранения
- 21. Энергия, работа, мощность Энергия универсальная мера различных форм движения и взаимодействия. С различными формами движения
- 22. Если тело движется прямолинейно и на него действует постоянная сила , которая составляет некоторый угол
- 23. Если вектор силы и направление перемещения образуют острый угол (cos0), работа положительна. Если угол -
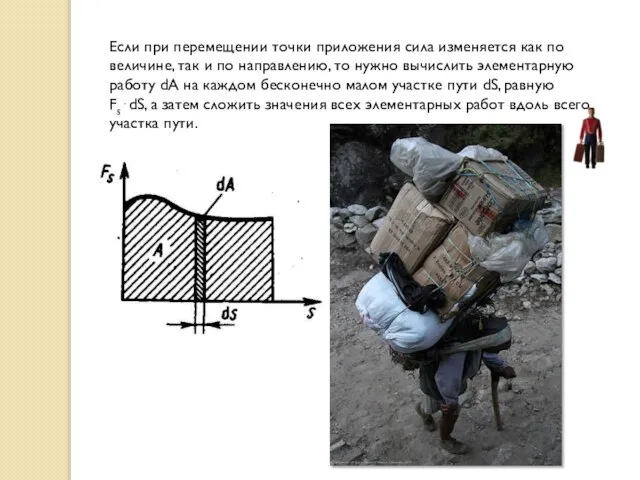
- 24. Если при перемещении точки приложения сила изменяется как по величине, так и по направлению, то нужно
- 25. Эта сумма приводится к интегралу который называется криволинейным интегралом вдоль траектории 12 (часто кривую 12 обозначают
- 26. За время dt сила совершает работу и мощность, развиваемая этой силой, в данный момент времени т.
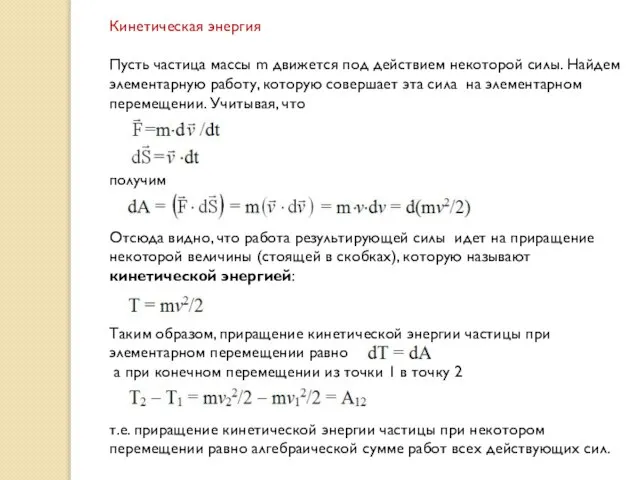
- 27. Кинетическая энергия Пусть частица массы m движется под действием некоторой силы. Найдем элементарную работу, которую совершает
- 28. Полученный результат без труда обобщается на случай произвольной системы материальных точек. Кинетической энергией системы называется сумма
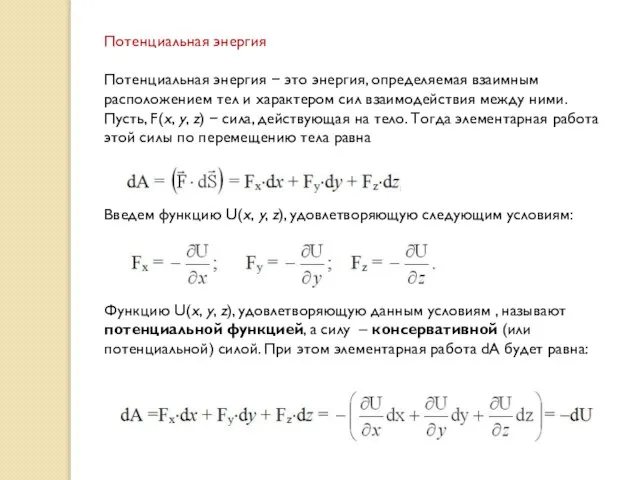
- 29. Потенциальная энергия Потенциальная энергия это энергия, определяемая взаимным расположением тел и характером сил взаимодействия между
- 30. Пусть тело под действием силы перемещается из точки 1 в точку 2, тогда работа этой силы
- 31. Итак, тело, находясь в поле консервативных сил, называемом потенциальным полем, обладает потенциальной энергией U(x, y, z).
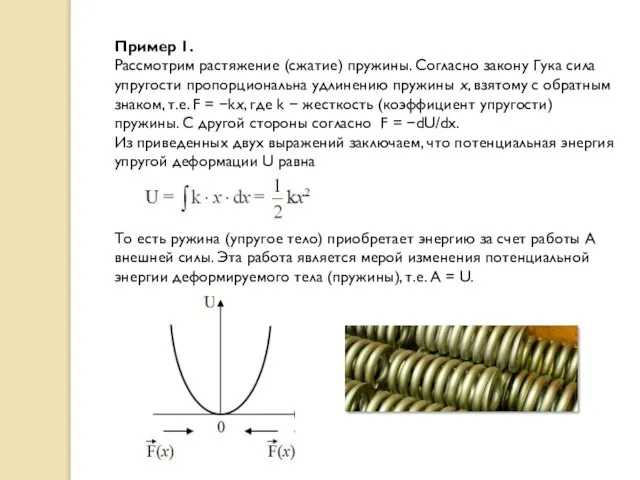
- 32. Пример 1. Рассмотрим растяжение (сжатие) пружины. Согласно закону Гука сила упругости пропорциональна удлинению пружины х, взятому
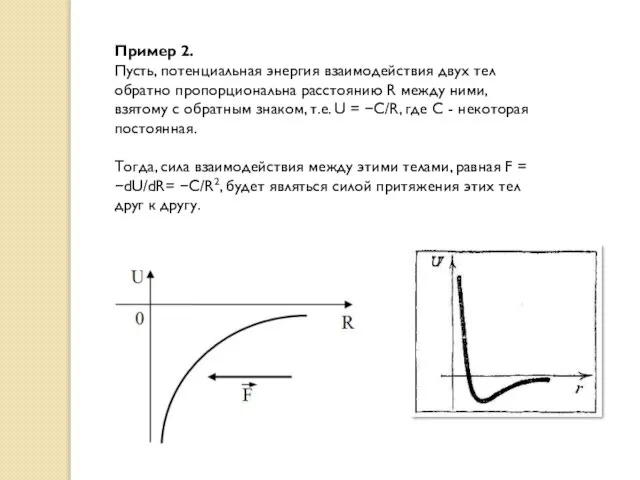
- 33. Пример 2. Пусть, потенциальная энергия взаимодействия двух тел обратно пропорциональна расстоянию R между ними, взятому с
- 34. Закон сохранения энергии Закон сохранения энергии результат обобщения многих экспериментальных данных. Идея этого закона принадлежит
- 35. Полная механическая энергия системы энергия механического движения и взаимодействия равна сумме кинетической и потенциальной энергий
- 36. Системы, в которых действуют диссипативные силы, например силы трения, называются диссипативными. В диссипативных системах полная механическая
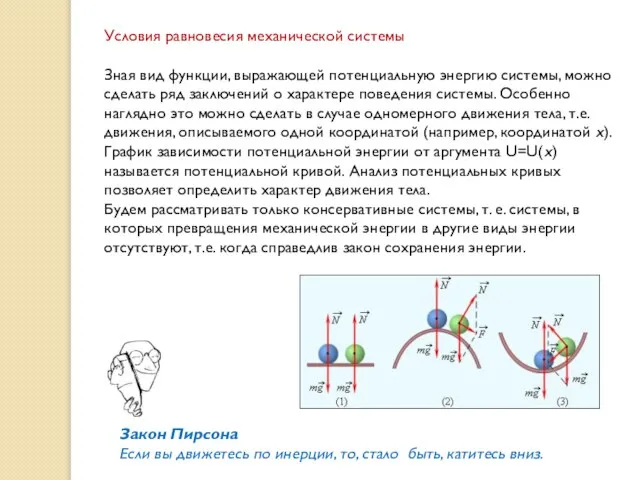
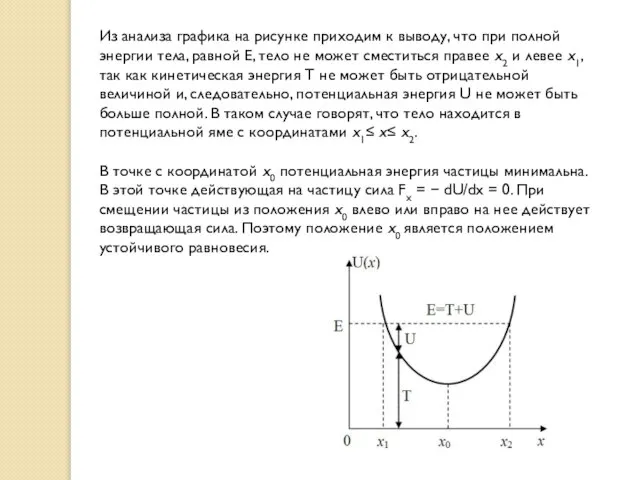
- 37. Условия равновесия механической системы Зная вид функции, выражающей потенциальную энергию системы, можно сделать ряд заключений о
- 38. Из анализа графика на рисунке приходим к выводу, что при полной энергии тела, равной Е, тело
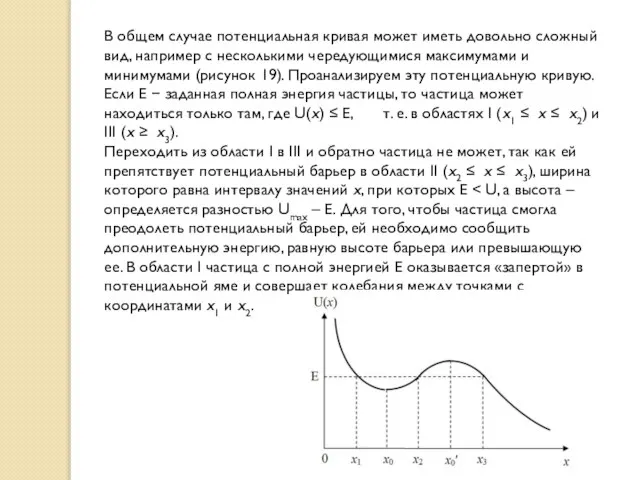
- 39. В общем случае потенциальная кривая может иметь довольно сложный вид, например с несколькими чередующимися максимумами и
- 40. В точке с координатой x0 потенциальная энергия частицы минимальна. Так как действующая на частицу сила Fx
- 41. Индийская мудрость Чувство юмора - это способность смеяться над собой. Часто юмор полезнее, чем лекции.
- 43. Скачать презентацию
Слайд 3В физике применяется также понятие веса тела.
Весом тела называют силу, с
В физике применяется также понятие веса тела.
Весом тела называют силу, с

Слайд 4Работа в поле тяготения. Потенциал поля тяготения
Рассмотрим, чему равна работа, совершаемая силами
Работа в поле тяготения. Потенциал поля тяготения
Рассмотрим, чему равна работа, совершаемая силами
Слайд 5Из последней формулы вытекает, что затраченная работа в поле тяготения не зависит
Из последней формулы вытекает, что затраченная работа в поле тяготения не зависит
Слайд 6Первая космическая скорость
Пе́рвая косми́ческая ско́рость (кругова́я ско́рость) — скорость, которую необходимо придать объекту,
Первая космическая скорость
Пе́рвая косми́ческая ско́рость (кругова́я ско́рость) — скорость, которую необходимо придать объекту,
Слайд 7Вторая космическая скорость
Втора́я косми́ческая ско́рость (параболи́ческая ско́рость, ско́рость освобожде́ния, ско́рость убега́ния) — наименьшая
Вторая космическая скорость
Втора́я косми́ческая ско́рость (параболи́ческая ско́рость, ско́рость освобожде́ния, ско́рость убега́ния) — наименьшая
Слайд 8Решая это уравнение относительно v2 , получим
Между первой и второй космическими скоростями
Решая это уравнение относительно v2 , получим
Между первой и второй космическими скоростями
Слайд 9Первая и вторая космические скорости для различных объектов
Первая и вторая космические скорости для различных объектов
Слайд 10Задание 1
Космический корабль улетает от Земли. Как направлен вектор ускорения корабля в
Задание 1
Космический корабль улетает от Земли. Как направлен вектор ускорения корабля в
Слайд 11Задание 2
У поверхности Земли на космонавта действует сила тяготения 720 Н. Какая сила
Задание 2
У поверхности Земли на космонавта действует сила тяготения 720 Н. Какая сила
Слайд 12Задание 3
Космонавт на Земле притягивается к ней с силой 700 Н. С какой
Задание 3
Космонавт на Земле притягивается к ней с силой 700 Н. С какой

Слайд 13Задание 4
Какова минимальная скорость падения метеорита на Луну?
Решение
Как следует из закона
Задание 4
Какова минимальная скорость падения метеорита на Луну?
Решение
Как следует из закона
Слайд 14Задание 5
Искусственный спутник Земли движется по круговой орбите.
Чему равно отношение его гравитационной
Задание 5
Искусственный спутник Земли движется по круговой орбите.
Чему равно отношение его гравитационной
Слайд 15Физика падения бутерброда
Распространено убеждение, что бутерброд практически всегда падает намазанной частью вниз
Физика падения бутерброда
Распространено убеждение, что бутерброд практически всегда падает намазанной частью вниз
Слайд 16Парадо́кс ко́шки с ма́слом - парадокс, основанный на двух народных мудростях:
кошки всегда
Парадо́кс ко́шки с ма́слом - парадокс, основанный на двух народных мудростях:
кошки всегда

Слайд 18Законы сохранения
Любое тело (или совокупность тел) представляет собой, по существу, систему материальных
Законы сохранения
Любое тело (или совокупность тел) представляет собой, по существу, систему материальных
Слайд 19В связи с этим возникает вопрос: нет ли каких-либо общих принципов, являющихся
В связи с этим возникает вопрос: нет ли каких-либо общих принципов, являющихся
Слайд 20Законы сохранения энергии, импульса и момента импульса связаны с фундаментальными свойствами времени
Законы сохранения энергии, импульса и момента импульса связаны с фундаментальными свойствами времени
Слайд 21Энергия, работа, мощность
Энергия универсальная мера различных форм движения и взаимодействия. С
Энергия, работа, мощность
Энергия универсальная мера различных форм движения и взаимодействия. С
Слайд 22Если тело движется прямолинейно и на него действует постоянная сила , которая
Если тело движется прямолинейно и на него действует постоянная сила , которая

Слайд 23 Если вектор силы и направление перемещения образуют острый угол (cos0), работа
Если вектор силы и направление перемещения образуют острый угол (cos0), работа
Слайд 24Если при перемещении точки приложения сила изменяется как по величине, так и
Если при перемещении точки приложения сила изменяется как по величине, так и
Слайд 25Эта сумма приводится к интегралу
который называется криволинейным интегралом вдоль траектории 12 (часто
Эта сумма приводится к интегралу
который называется криволинейным интегралом вдоль траектории 12 (часто
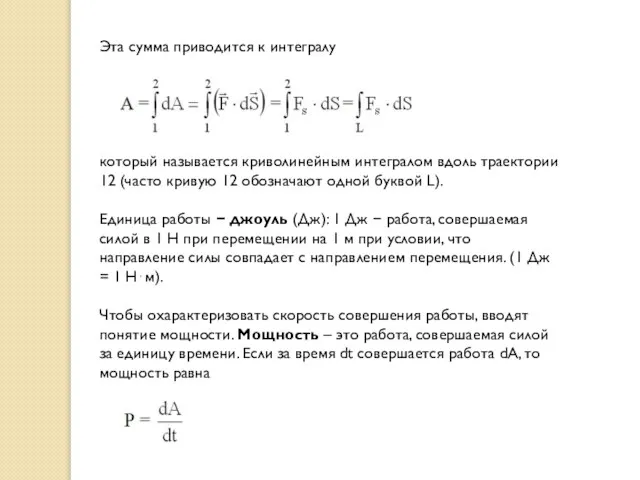
Слайд 26За время dt сила совершает работу и мощность, развиваемая этой силой, в данный
За время dt сила совершает работу и мощность, развиваемая этой силой, в данный
Слайд 27Кинетическая энергия
Пусть частица массы m движется под действием некоторой силы. Найдем элементарную
Кинетическая энергия
Пусть частица массы m движется под действием некоторой силы. Найдем элементарную
Слайд 28Полученный результат без труда обобщается на случай произвольной системы материальных точек.
Кинетической
Полученный результат без труда обобщается на случай произвольной системы материальных точек.
Кинетической
Слайд 29Потенциальная энергия
Потенциальная энергия это энергия, определяемая взаимным расположением тел и характером
Потенциальная энергия
Потенциальная энергия это энергия, определяемая взаимным расположением тел и характером
Слайд 30Пусть тело под действием силы перемещается из точки 1 в точку 2,
Пусть тело под действием силы перемещается из точки 1 в точку 2,
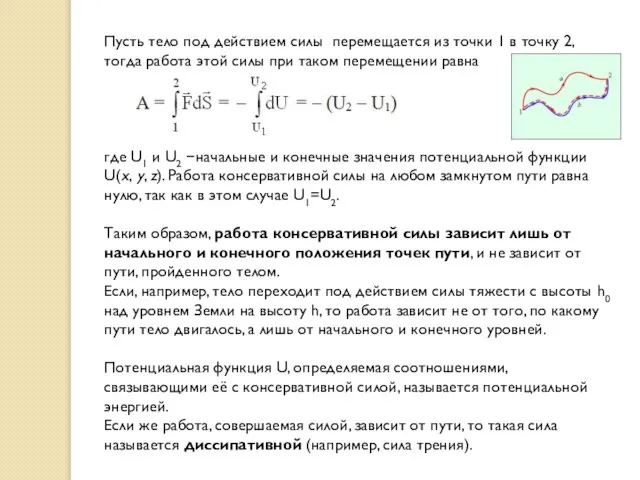
Слайд 31Итак, тело, находясь в поле консервативных сил, называемом потенциальным полем, обладает потенциальной
Итак, тело, находясь в поле консервативных сил, называемом потенциальным полем, обладает потенциальной
Слайд 32Пример 1.
Рассмотрим растяжение (сжатие) пружины. Согласно закону Гука сила упругости пропорциональна
Пример 1.
Рассмотрим растяжение (сжатие) пружины. Согласно закону Гука сила упругости пропорциональна
Слайд 33Пример 2.
Пусть, потенциальная энергия взаимодействия двух тел обратно пропорциональна расстоянию R
Пример 2.
Пусть, потенциальная энергия взаимодействия двух тел обратно пропорциональна расстоянию R
Слайд 34Закон сохранения энергии
Закон сохранения энергии результат обобщения многих экспериментальных данных. Идея
Закон сохранения энергии
Закон сохранения энергии результат обобщения многих экспериментальных данных. Идея
Слайд 35Полная механическая энергия системы энергия механического движения и взаимодействия равна сумме
Полная механическая энергия системы энергия механического движения и взаимодействия равна сумме
Слайд 36Системы, в которых действуют диссипативные силы, например силы трения, называются диссипативными.
В
Системы, в которых действуют диссипативные силы, например силы трения, называются диссипативными.
В
Слайд 37Условия равновесия механической системы
Зная вид функции, выражающей потенциальную энергию системы, можно сделать
Условия равновесия механической системы
Зная вид функции, выражающей потенциальную энергию системы, можно сделать
Слайд 38Из анализа графика на рисунке приходим к выводу, что при полной энергии
Из анализа графика на рисунке приходим к выводу, что при полной энергии
Слайд 39В общем случае потенциальная кривая может иметь довольно сложный вид, например с
В общем случае потенциальная кривая может иметь довольно сложный вид, например с
Слайд 40В точке с координатой x0 потенциальная энергия частицы минимальна.
Так как действующая
В точке с координатой x0 потенциальная энергия частицы минимальна.
Так как действующая
Слайд 41Индийская мудрость
Чувство юмора - это способность смеяться над собой. Часто юмор полезнее,
Индийская мудрость
Чувство юмора - это способность смеяться над собой. Часто юмор полезнее,

 Презентация на тему Развлекательная викторина "Звездный час"
Презентация на тему Развлекательная викторина "Звездный час" Шартрский собор
Шартрский собор Презентация на тему Сверхновые звезды
Презентация на тему Сверхновые звезды  My favourite animal 4 класс
My favourite animal 4 класс Голубь - символ мира
Голубь - символ мира Приготовление блюда рулетики ветчинные
Приготовление блюда рулетики ветчинные Презентация Microsoft PowerPoint
Презентация Microsoft PowerPoint LK IMPRESS
LK IMPRESS Суффиксы прилагательных
Суффиксы прилагательных Презентация на тему Опасность петард и взрывотехники
Презентация на тему Опасность петард и взрывотехники Помним и гордимся
Помним и гордимся Оқушының сұрағына ынтыландыра жауап беру
Оқушының сұрағына ынтыландыра жауап беру Самовар
Самовар Система, источники и принципы административного права. Лекция № 4
Система, источники и принципы административного права. Лекция № 4 Благоприятная предпринимательская среда
Благоприятная предпринимательская среда Луна Выполнил ученик 2 класса МОУ Гридинской основной общеобразовательной школы Шулегин Максим
Луна Выполнил ученик 2 класса МОУ Гридинской основной общеобразовательной школы Шулегин Максим %
% 2011
2011 Мария Зачиняева совместно с Миладзе
Мария Зачиняева совместно с Миладзе Керамика. Древнейшая керамика
Керамика. Древнейшая керамика Дуэль Пушкина и Дантеса
Дуэль Пушкина и Дантеса Лидерство и руководство в теории менеджмента
Лидерство и руководство в теории менеджмента Эта увлекательная химия
Эта увлекательная химия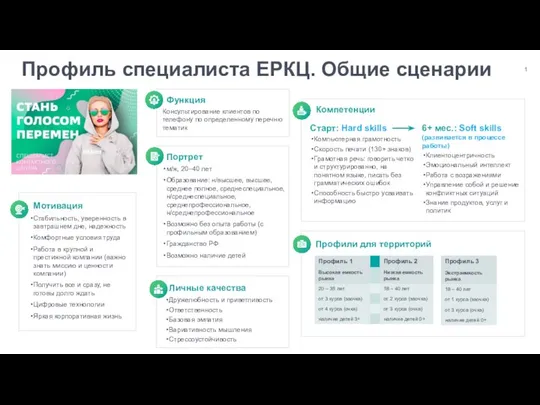 Профиль специалиста ЕРКЦ. Общие сценарии
Профиль специалиста ЕРКЦ. Общие сценарии 1
1 Дешевая ипотека и /или доступное жилье?
Дешевая ипотека и /или доступное жилье? Организационные структуры управления. (Тема 2)
Организационные структуры управления. (Тема 2) Основы правового статуса обучающегося. Участие родителей (законных представителей) обучающихся в образовательном процессе
Основы правового статуса обучающегося. Участие родителей (законных представителей) обучающихся в образовательном процессе