Прототип аварийно-устойчивого автопилота на основе бионического метода «Автономного Адаптивного Управления»
- Прототип аварийно-устойчивого автопилота на основе бионического метода «Автономного Адаптивного Управления»

Содержание
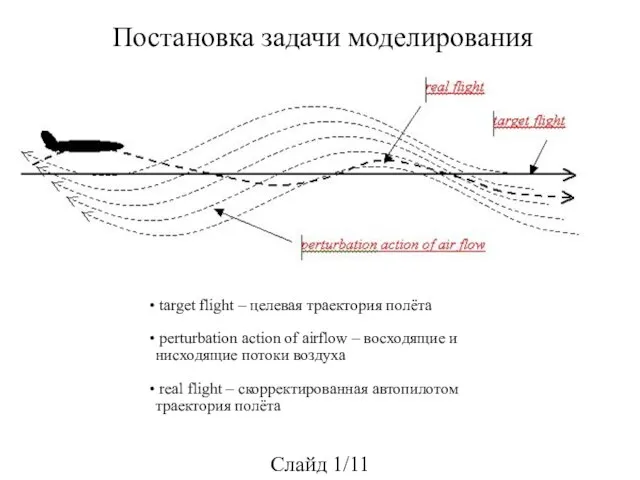
- 2. Постановка задачи моделирования target flight – целевая траектория полёта perturbation action of airflow – восходящие и
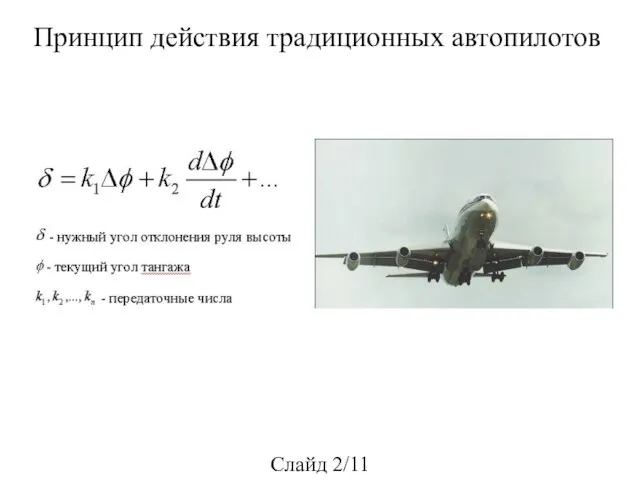
- 3. Принцип действия традиционных автопилотов Cлайд 2/11
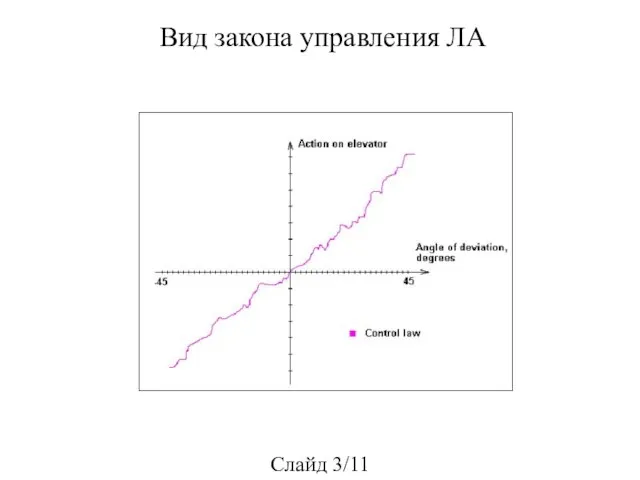
- 4. Вид закона управления ЛА Cлайд 3/11
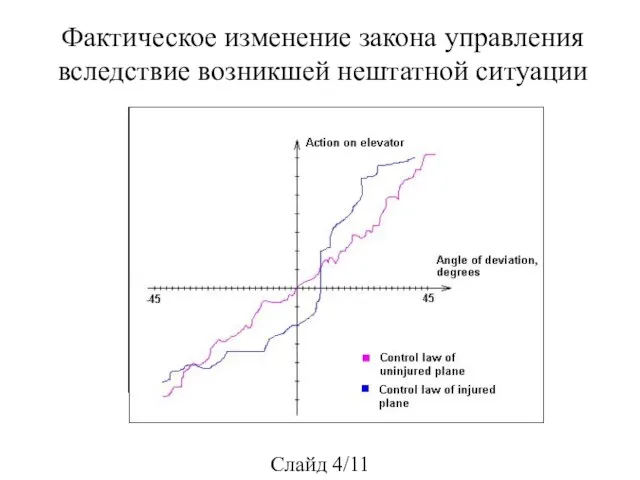
- 5. Фактическое изменение закона управления вследствие возникшей нештатной ситуации Cлайд 4/11
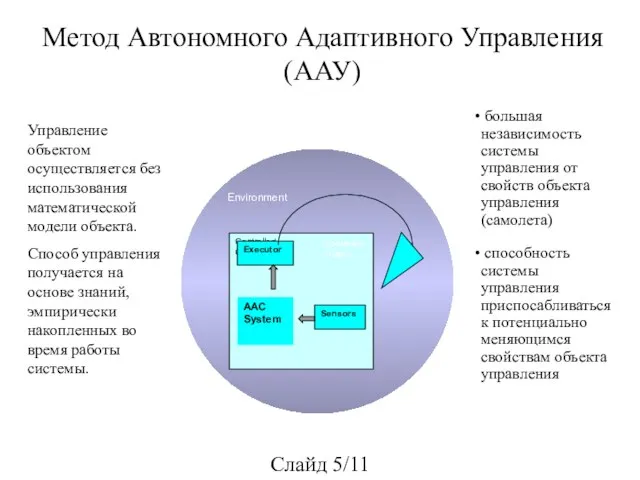
- 6. Метод Автономного Адаптивного Управления (ААУ) Управление объектом осуществляется без использования математической модели объекта. Способ управления получается
- 7. Стенд для моделирования эксперимента Cлайд 6/11
- 8. Стенд для моделирования эксперимента / 2 Cлайд 7/11
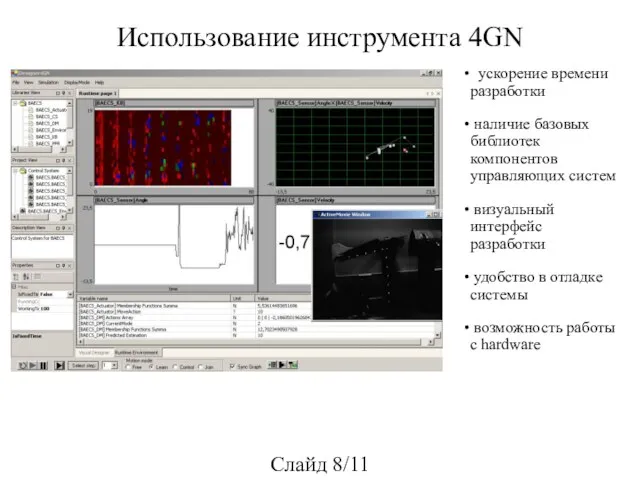
- 9. Использование инструмента 4GN ускорение времени разработки наличие базовых библиотек компонентов управляющих систем визуальный интерфейс разработки удобство
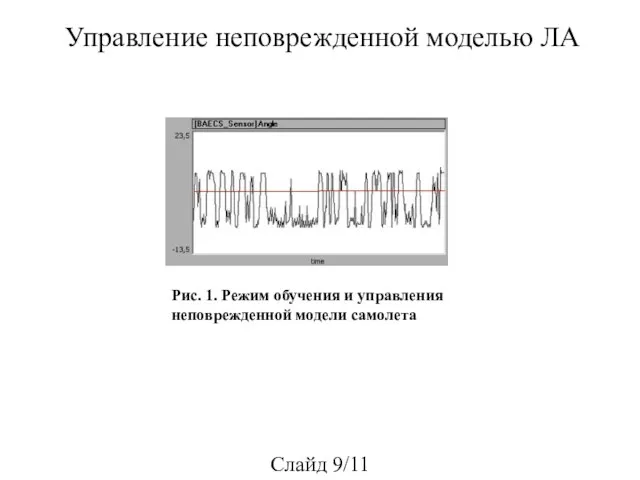
- 10. Управление неповрежденной моделью ЛА Рис. 1. Режим обучения и управления неповрежденной модели самолета Cлайд 9/11
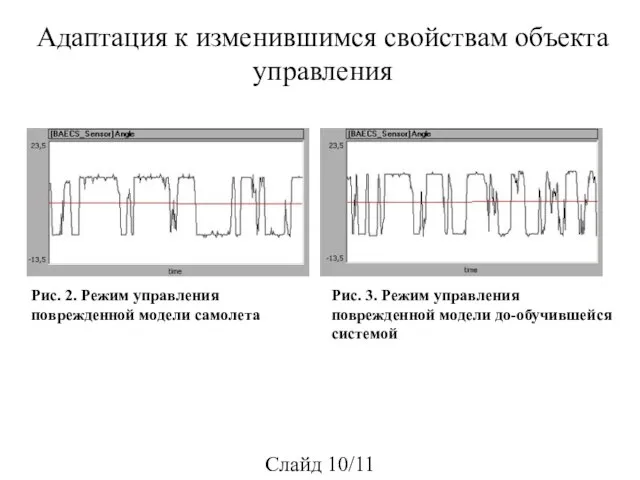
- 11. Адаптация к изменившимся свойствам объекта управления Рис. 2. Режим управления поврежденной модели самолета Рис. 3. Режим
- 12. Основные полученные результаты: Cлайд 11/11 1. Разработана и изготовлена физическая модель самолёта и окружающей среды. 2.
- 14. Скачать презентацию
Слайд 2Постановка задачи моделирования
target flight – целевая траектория полёта
perturbation action
Постановка задачи моделирования
target flight – целевая траектория полёта
perturbation action
Слайд 3Принцип действия традиционных автопилотов
Cлайд 2/11
Принцип действия традиционных автопилотов
Cлайд 2/11
Слайд 4Вид закона управления ЛА
Cлайд 3/11
Вид закона управления ЛА
Cлайд 3/11
Слайд 5Фактическое изменение закона управления вследствие возникшей нештатной ситуации
Cлайд 4/11
Фактическое изменение закона управления вследствие возникшей нештатной ситуации
Cлайд 4/11
Слайд 6Метод Автономного Адаптивного Управления (ААУ)
Управление объектом осуществляется без использования математической модели
Метод Автономного Адаптивного Управления (ААУ)
Управление объектом осуществляется без использования математической модели
Слайд 7Стенд для моделирования эксперимента
Cлайд 6/11
Стенд для моделирования эксперимента
Cлайд 6/11

Слайд 8Стенд для моделирования эксперимента / 2
Cлайд 7/11
Стенд для моделирования эксперимента / 2
Cлайд 7/11

Слайд 9Использование инструмента 4GN
ускорение времени разработки
наличие базовых библиотек компонентов управляющих
Использование инструмента 4GN
ускорение времени разработки
наличие базовых библиотек компонентов управляющих
Слайд 10Управление неповрежденной моделью ЛА
Рис. 1. Режим обучения и управления неповрежденной модели самолета
Управление неповрежденной моделью ЛА
Рис. 1. Режим обучения и управления неповрежденной модели самолета
Слайд 11Адаптация к изменившимся свойствам объекта управления
Рис. 2. Режим управления поврежденной модели самолета
Адаптация к изменившимся свойствам объекта управления
Рис. 2. Режим управления поврежденной модели самолета
Слайд 12Основные полученные результаты:
Cлайд 11/11
1. Разработана и изготовлена физическая модель самолёта и окружающей
Основные полученные результаты:
Cлайд 11/11
1. Разработана и изготовлена физическая модель самолёта и окружающей
 Безопасность ребенка в интернет: что могут сделать взрослые?
Безопасность ребенка в интернет: что могут сделать взрослые? Презентация на тему Методы исследования в биологии (10 класс)
Презентация на тему Методы исследования в биологии (10 класс) Традиции Бурятии
Традиции Бурятии Заповедники Казахстана
Заповедники Казахстана Ведомственный архив
Ведомственный архив ТИТБИТ (Товарищество Информационных Технологий БИТ)г. Киев, (044) 2712452, 2712125,
ТИТБИТ (Товарищество Информационных Технологий БИТ)г. Киев, (044) 2712452, 2712125,  Торгово-технологический процесс по продаже пылесосов
Торгово-технологический процесс по продаже пылесосов Формирование мнения в Интернете
Формирование мнения в Интернете Aroma Diffuser. Design Development
Aroma Diffuser. Design Development Тема: Влияние школьного шума на работоспособность школьников. Над темой работали учащиеся 1 «В» класса. Учитель: Зайчен
Тема: Влияние школьного шума на работоспособность школьников. Над темой работали учащиеся 1 «В» класса. Учитель: Зайчен Все про Акваріуми
Все про Акваріуми Маркетинг взаимоотношений: особенности применения в технической библиотеке предприятия
Маркетинг взаимоотношений: особенности применения в технической библиотеке предприятия Построение в линзах
Построение в линзах Управляющий совет как форма гражданского участия в управлении образованием
Управляющий совет как форма гражданского участия в управлении образованием Презентацию подготовила Помогаева Татьяна 10А Руководитель учитель биологии Черкасская Н.Б. школа №858 ЮОУ г.Москвы
Презентацию подготовила Помогаева Татьяна 10А Руководитель учитель биологии Черкасская Н.Б. школа №858 ЮОУ г.Москвы Новая жизнь здания Казанского вокзала, проект
Новая жизнь здания Казанского вокзала, проект Two instead of one
Two instead of one  Taller de comunicación oral y escrita
Taller de comunicación oral y escrita No HR
No HR «Возможности МР исследований в гинекологической практике» Рогожин В.А. Радиологический центр МК «БОРИС» (Киев, Украина) Европе
«Возможности МР исследований в гинекологической практике» Рогожин В.А. Радиологический центр МК «БОРИС» (Киев, Украина) Европе The rolling roll
The rolling roll Презентация на темe Строение пищеварительной системы
Презентация на темe Строение пищеварительной системы  Өткен білімді тексеру
Өткен білімді тексеру Заседание администрации Кировского муниципального района Ставропольского края
Заседание администрации Кировского муниципального района Ставропольского края Знания и навыки аудиторов
Знания и навыки аудиторов Статистика
Статистика Проанализируйте мебель модерна на примере фабрики Ф. Мельцера
Проанализируйте мебель модерна на примере фабрики Ф. Мельцера Влияние занятий аэробикой на организм занимающегося
Влияние занятий аэробикой на организм занимающегося