- Разновидности систем автоматического регулирования САР и САУ

Содержание
- 2. По методу управления 01 02 03 04 05 По характеру использования информации По результатам работы в
- 3. ПО МЕТОДУ УПРАВЛЕНИЯ РАЗНОВИДНОСТИ САР И САУ «Автоматика и управление» НЕПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ ПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ Наиболее простые
- 4. ПО ХАРАКТЕРУ ИСПОЛЬЗОВАНИЯ ИНФОРМАЦИИ РАЗНОВИДНОСТИ САР И САУ ЗАМКНУТЫЕ РАЗОМКНУТЫЕ КОМБИНИРОВАННЫЕ для работы используют текущую рабочую
- 5. ПО РЕЗУЛЬТАТАМ РАБОТЫ В УСТАНОВИВШЕМСЯ СОСТОЯНИИ РАЗНОВИДНОСТИ САР И САУ АСТАТИЧЕСКИЕ СИСТЕМЫ СТАТИЧЕСКИЕ СИСТЕМЫ регулируемая величина
- 6. Рисунок 1. Графики переходных процессов в астатической системе РАЗНОВИДНОСТИ САР И САУ Рисунок 2. Графики переходных
- 7. ПО ЧИСЛУ РЕГУЛИРУЕМЫХ ВЕЛИЧИН РАЗНОВИДНОСТИ САР И САУ ОДНОМЕРНЫЕ СИСТЕМЫ МНОГОМЕРНЫЕ СИСТЕМЫ К ним относятся простейшие
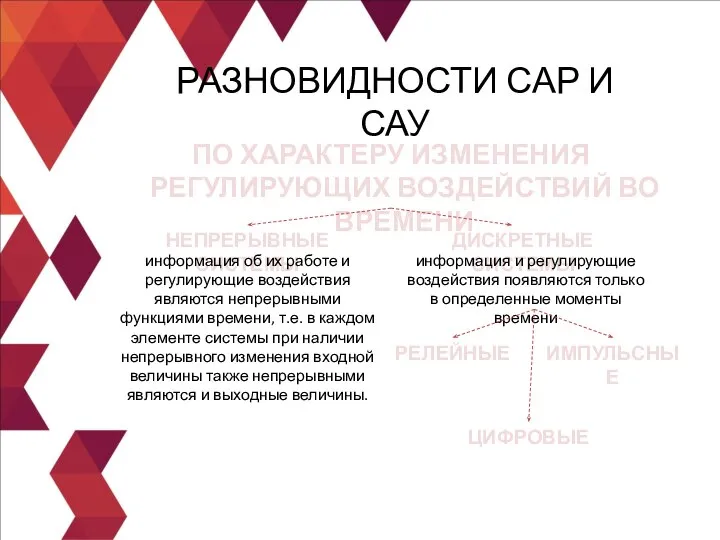
- 8. ПО ХАРАКТЕРУ ИЗМЕНЕНИЯ РЕГУЛИРУЮЩИХ ВОЗДЕЙСТВИЙ ВО ВРЕМЕНИ РАЗНОВИДНОСТИ САР И САУ НЕПРЕРЫВНЫЕ СИСТЕМЫ ДИСКРЕТНЫЕ СИСТЕМЫ информация
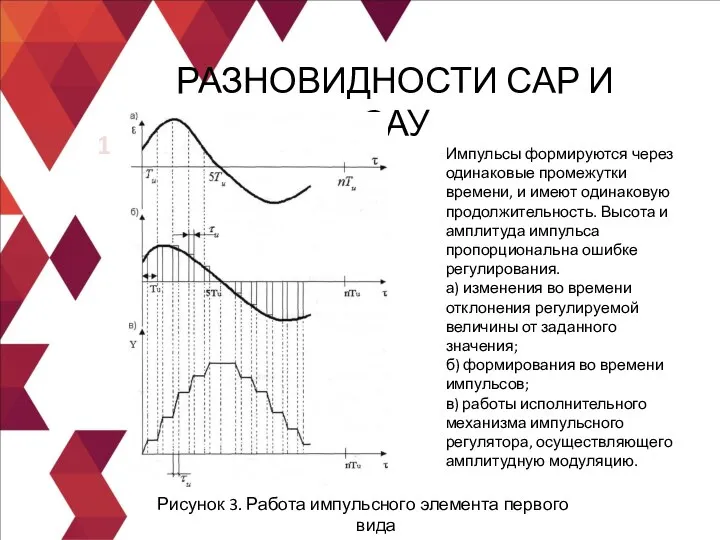
- 9. Рисунок 3. Работа импульсного элемента первого вида РАЗНОВИДНОСТИ САР И САУ 1 Импульсы формируются через одинаковые
- 11. Скачать презентацию
Слайд 2По методу управления
01
02
03
04
05
По характеру использования информации
По результатам работы в установившемся состоянии
По числу
По методу управления
01
02
03
04
05
По характеру использования информации
По результатам работы в установившемся состоянии
По числу

Слайд 3ПО МЕТОДУ УПРАВЛЕНИЯ
РАЗНОВИДНОСТИ САР И САУ
«Автоматика и управление»
НЕПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ
ПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ
Наиболее простые системы,
ПО МЕТОДУ УПРАВЛЕНИЯ
РАЗНОВИДНОСТИ САР И САУ
«Автоматика и управление»
НЕПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ
ПРИСПОСАБЛИВАЮЩИЕСЯ СИСТЕМЫ
Наиболее простые системы,
Слайд 4ПО ХАРАКТЕРУ ИСПОЛЬЗОВАНИЯ ИНФОРМАЦИИ
РАЗНОВИДНОСТИ САР И САУ
ЗАМКНУТЫЕ
РАЗОМКНУТЫЕ
КОМБИНИРОВАННЫЕ
для работы используют текущую рабочую информацию
ПО ХАРАКТЕРУ ИСПОЛЬЗОВАНИЯ ИНФОРМАЦИИ
РАЗНОВИДНОСТИ САР И САУ
ЗАМКНУТЫЕ
РАЗОМКНУТЫЕ
КОМБИНИРОВАННЫЕ
для работы используют текущую рабочую информацию
Слайд 5ПО РЕЗУЛЬТАТАМ РАБОТЫ В УСТАНОВИВШЕМСЯ СОСТОЯНИИ
РАЗНОВИДНОСТИ САР И САУ
АСТАТИЧЕСКИЕ СИСТЕМЫ
СТАТИЧЕСКИЕ СИСТЕМЫ
регулируемая величина
ПО РЕЗУЛЬТАТАМ РАБОТЫ В УСТАНОВИВШЕМСЯ СОСТОЯНИИ
РАЗНОВИДНОСТИ САР И САУ
АСТАТИЧЕСКИЕ СИСТЕМЫ
СТАТИЧЕСКИЕ СИСТЕМЫ
регулируемая величина
Слайд 6Рисунок 1. Графики переходных процессов в астатической системе
РАЗНОВИДНОСТИ САР И САУ
Рисунок 2.
Рисунок 1. Графики переходных процессов в астатической системе
РАЗНОВИДНОСТИ САР И САУ
Рисунок 2.

Слайд 7ПО ЧИСЛУ РЕГУЛИРУЕМЫХ ВЕЛИЧИН
РАЗНОВИДНОСТИ САР И САУ
ОДНОМЕРНЫЕ СИСТЕМЫ
МНОГОМЕРНЫЕ СИСТЕМЫ
К ним относятся простейшие
ПО ЧИСЛУ РЕГУЛИРУЕМЫХ ВЕЛИЧИН
РАЗНОВИДНОСТИ САР И САУ
ОДНОМЕРНЫЕ СИСТЕМЫ
МНОГОМЕРНЫЕ СИСТЕМЫ
К ним относятся простейшие
Слайд 8ПО ХАРАКТЕРУ ИЗМЕНЕНИЯ РЕГУЛИРУЮЩИХ ВОЗДЕЙСТВИЙ ВО ВРЕМЕНИ
РАЗНОВИДНОСТИ САР И САУ
НЕПРЕРЫВНЫЕ СИСТЕМЫ
ДИСКРЕТНЫЕ СИСТЕМЫ
информация
ПО ХАРАКТЕРУ ИЗМЕНЕНИЯ РЕГУЛИРУЮЩИХ ВОЗДЕЙСТВИЙ ВО ВРЕМЕНИ
РАЗНОВИДНОСТИ САР И САУ
НЕПРЕРЫВНЫЕ СИСТЕМЫ
ДИСКРЕТНЫЕ СИСТЕМЫ
информация
Слайд 9Рисунок 3. Работа импульсного элемента первого вида
РАЗНОВИДНОСТИ САР И САУ
1
Импульсы формируются через
Рисунок 3. Работа импульсного элемента первого вида
РАЗНОВИДНОСТИ САР И САУ
1
Импульсы формируются через
 Управление Роскомнадзора по Северо-Западному федеральному округу - 2021
Управление Роскомнадзора по Северо-Западному федеральному округу - 2021 Признаки Любви
Признаки Любви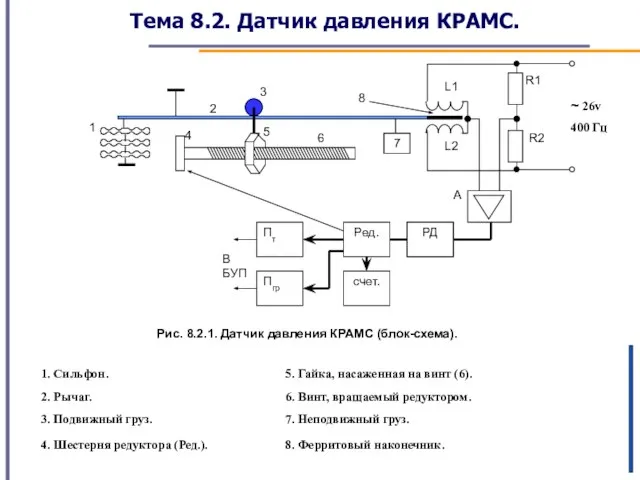 Тема 8.2. Датчик давления КРАМС.
Тема 8.2. Датчик давления КРАМС. Физиология почки
Физиология почки Оборудование для очистных работ. Устройства для сушки (обдува) автомобиля
Оборудование для очистных работ. Устройства для сушки (обдува) автомобиля Грозит ли России новый застой?Перспективы экономического роста после кризиса
Грозит ли России новый застой?Перспективы экономического роста после кризиса Миграции населения в современном мире Подготовила: Клеутина С.А.
Миграции населения в современном мире Подготовила: Клеутина С.А. Глава 2 МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
Глава 2 МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ О реализации полномочий по утверждению нормативов потребления коммунальных услуг
О реализации полномочий по утверждению нормативов потребления коммунальных услуг Лыжный спорт
Лыжный спорт Презентация по учебной / производственной практике
Презентация по учебной / производственной практике По страницам повести И.С.Тургенева «Ася»
По страницам повести И.С.Тургенева «Ася» Какой ты супергерой из мультфильма (тест)
Какой ты супергерой из мультфильма (тест) Презентация на тему почему идут дожди и дует ветер
Презентация на тему почему идут дожди и дует ветер  План проведения недели науки и творчества
План проведения недели науки и творчества ForteBank. Итоги
ForteBank. Итоги Роль органов местного самоуправления в поддержке малого предпринимательства на примере администрации городского округа Балашиха
Роль органов местного самоуправления в поддержке малого предпринимательства на примере администрации городского округа Балашиха Причёски и костюм XVII – XIX веков
Причёски и костюм XVII – XIX веков Закон Ома
Закон Ома Профсоюзная Организация Обучающихся ШАДИ(ф)
Профсоюзная Организация Обучающихся ШАДИ(ф) «…единственно нужное размещение единственно нужных слов»(Л. Толстой о труде поэта и писателя)
«…единственно нужное размещение единственно нужных слов»(Л. Толстой о труде поэта и писателя) Конгресс США. Структура. Функции и порядок формирования палат
Конгресс США. Структура. Функции и порядок формирования палат Презентация на тему Русский символизм в литературе
Презентация на тему Русский символизм в литературе простаяМАТЕМАТИКА
простаяМАТЕМАТИКА П.А. Столыпину посвящается…
П.А. Столыпину посвящается… Презентация на тему Электризация в природе и в жизни
Презентация на тему Электризация в природе и в жизни 8 марта
8 марта Доклад начальника ПЧ-340
Доклад начальника ПЧ-340