- Разработка электрической винто-моторной группы для лёгкого летательного аппарата

Содержание
- 2. ФОРМУЛИРОВКА ИНЖЕНЕРНОЙ ЗАДАЧИ Разработка Российской, авиационной винто-моторной установки (ВМГ) для лёгких летательных аппаратов. Мощность электрического двигателя
- 3. Общая схема винто-моторной установки . Технические характеристики: Мощность-15кВт Частота вращения- 2800-3000об/мин Напряжение- 75В Ток- 200-300А Вес
- 4. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками (ротор – магниты,
- 5. Контроллер для бесколлекторного двигателя Контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей
- 6. Литий-полимерный аккумулятор (Li-pol) — это более совершенная конструкция литий-ионного аккумулятора. В качестве электролита используется полимерный материал
- 7. Во время нашего проекта мы познакомились с конструкциями воздушного винта и самолета, разобрали типы существующих двигателей,
- 8. По прототипу и расчётным способом были выбраны габариты и характеристики электродвигателя. Проектирование
- 9. Изготовление деталей (фото изготовленного статора и магнитопровода) Статор состоит из корпуса, сердечника из электротехнической стали и
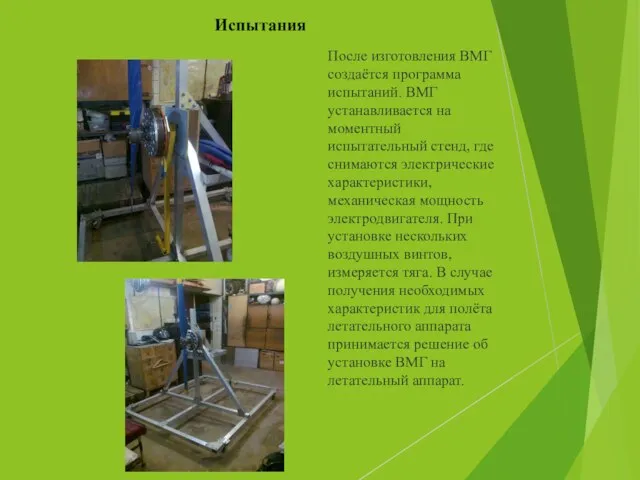
- 10. Испытания После изготовления ВМГ создаётся программа испытаний. ВМГ устанавливается на моментный испытательный стенд, где снимаются электрические
- 12. Скачать презентацию
Слайд 2ФОРМУЛИРОВКА ИНЖЕНЕРНОЙ ЗАДАЧИ
Разработка Российской, авиационной винто-моторной установки (ВМГ) для лёгких летательных аппаратов.
ФОРМУЛИРОВКА ИНЖЕНЕРНОЙ ЗАДАЧИ
Разработка Российской, авиационной винто-моторной установки (ВМГ) для лёгких летательных аппаратов.

Слайд 3Общая схема винто-моторной установки
.
Технические характеристики:
Мощность-15кВт
Частота вращения- 2800-3000об/мин
Напряжение- 75В
Ток-
Общая схема винто-моторной установки
.
Технические характеристики:
Мощность-15кВт
Частота вращения- 2800-3000об/мин
Напряжение- 75В
Ток-

Слайд 4Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с

Слайд 5Контроллер для бесколлекторного двигателя
Контроллер коммутирует определённое количество обмоток статора таким образом, что
Контроллер для бесколлекторного двигателя
Контроллер коммутирует определённое количество обмоток статора таким образом, что

Слайд 6
Литий-полимерный аккумулятор (Li-pol) — это более совершенная конструкция литий-ионного аккумулятора.
Литий-полимерный аккумулятор (Li-pol) — это более совершенная конструкция литий-ионного аккумулятора.

Слайд 7Во время нашего проекта мы познакомились с конструкциями воздушного винта и самолета,
Во время нашего проекта мы познакомились с конструкциями воздушного винта и самолета,

Слайд 8По прототипу и расчётным способом были выбраны габариты и характеристики электродвигателя.
Проектирование
По прототипу и расчётным способом были выбраны габариты и характеристики электродвигателя.
Проектирование

Слайд 9Изготовление деталей (фото изготовленного статора и магнитопровода)
Статор состоит из корпуса, сердечника из
Изготовление деталей (фото изготовленного статора и магнитопровода)
Статор состоит из корпуса, сердечника из

Слайд 10Испытания
После изготовления ВМГ создаётся программа испытаний. ВМГ устанавливается на моментный испытательный стенд,
Испытания
После изготовления ВМГ создаётся программа испытаний. ВМГ устанавливается на моментный испытательный стенд,
 Countries
Countries Тревожность и агрессия как основные факторы аутоагрессивного поведения подростков: рекомендации педагогам
Тревожность и агрессия как основные факторы аутоагрессивного поведения подростков: рекомендации педагогам Занятие Рисование по представлению В школе
Занятие Рисование по представлению В школе Mon heros
Mon heros Процедурное программирование
Процедурное программирование  Управление персоналом: специфика, задачи, основные функции
Управление персоналом: специфика, задачи, основные функции Инновационные технологии объемной аэрозольной дезинфекции экологически чистыми биоцидами при эксплуатации зданий и сооружений
Инновационные технологии объемной аэрозольной дезинфекции экологически чистыми биоцидами при эксплуатации зданий и сооружений Товарный и коммерческий кредит
Товарный и коммерческий кредит Сложные открытые бутерброды
Сложные открытые бутерброды Постройки родного города
Постройки родного города Связующая нить времён
Связующая нить времён Общественный конфликт комедии Грибоедова Горе от Ума
Общественный конфликт комедии Грибоедова Горе от Ума Стимулирование свободным временем
Стимулирование свободным временем Написание "не" с причастиями и деепричастиями
Написание "не" с причастиями и деепричастиями Презентация на тему Аркадий Кирсанов в произведение Ивана сергеевича тургенева «отцы и дети»
Презентация на тему Аркадий Кирсанов в произведение Ивана сергеевича тургенева «отцы и дети» Презентация на тему Жизнь и творчество Сальвадора Дали
Презентация на тему Жизнь и творчество Сальвадора Дали Правки. Лого полноценные
Правки. Лого полноценные Малый бизнес и мобильные приложения 2.
Малый бизнес и мобильные приложения 2. Изображение университета
Изображение университета Человек и Бог всемогущий
Человек и Бог всемогущий Композиция костюма
Композиция костюма Патриотическое воспитание на уроках истории учитель истории МОУ СОШ № 17 п. Левиха, г Кировград Мишина А.В.
Патриотическое воспитание на уроках истории учитель истории МОУ СОШ № 17 п. Левиха, г Кировград Мишина А.В. Реформы государственного управления при Петре I
Реформы государственного управления при Петре I Открытие головного офиса и центра дляДетей-Ангелов
Открытие головного офиса и центра дляДетей-Ангелов Учитель-логопед Железнова Елена Александровна
Учитель-логопед Железнова Елена Александровна 20161219_pz
20161219_pz Проект С Повышение эффективности предоставления услуг охраны
Проект С Повышение эффективности предоставления услуг охраны Совет молодежи при главе Барабинского района (фотографии)
Совет молодежи при главе Барабинского района (фотографии)