РАЗРАБОТКА СЕМЕЙСТВА АДАПТИВНЫХ ГИДРОМЕХАНИЧЕСКИХ ГАСИТЕЛЕЙ КОЛЕБАНИЙ ДЛЯ РЕЛЬСОВЫХ И БЕЗРЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ
- РАЗРАБОТКА СЕМЕЙСТВА АДАПТИВНЫХ ГИДРОМЕХАНИЧЕСКИХ ГАСИТЕЛЕЙ КОЛЕБАНИЙ ДЛЯ РЕЛЬСОВЫХ И БЕЗРЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ

Содержание
- 2. В настоящее время в мировом сообществе широко используется автомобильный и железнодорожный подвижной состав предназначенный, как для
- 3. В современных конструкциях транспортных средств и, в частности, в их рессорном подвешивании нашли широкое применение различные
- 4. Учитывая вышеизложенное, в ЕГУ им. И.А. Бунина совместно с ОрелГТУ, проводится НИР по теме «Разработка практических
- 5. Сущность предложенных технических решений заключается в том, что поршни снабжены вертикальными дроссельными каналами, которые переходят на
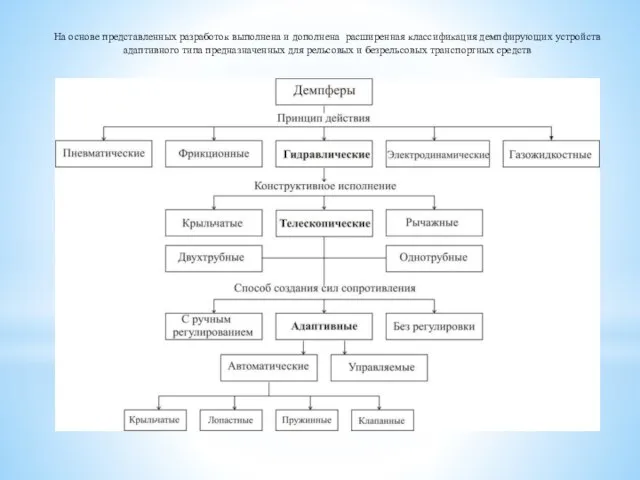
- 6. На основе представленных разработок выполнена и дополнена расширенная классификация демпфирующих устройств адаптивного типа предназначенных для рельсовых
- 7. Рассмотрим, в качестве примера, один из вариантов предложенных технических решений (RU2385425), который наиболее полно отражает конструкции,
- 8. своей продольной оси симметрии, рассеивает энергию рабочего хода в окружающую среду. При движении штока 2 в
- 9. Известно , что коэффициент демпфирования α(t) зависит от гидравлических сопротивлений в дроссельном канале амортизатора, вязкости рабочей
- 10. Так как при движении поршня происходит чистое кручение штока, то абсолютный угол его закручивания можно определить
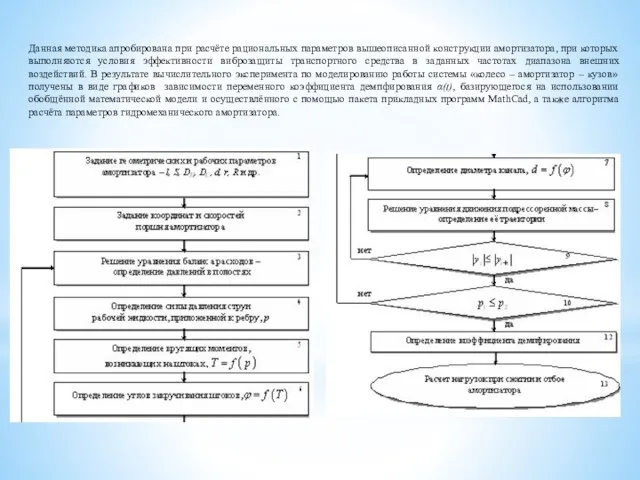
- 11. Данная методика апробирована при расчёте рациональных параметров вышеописанной конструкции амортизатора, при которых выполняются условия эффективности виброзащиты
- 13. Анализ полученных численных решений и представленных графиков показывает, что эффективность демпфирования колебаний транспортных машин достигается за
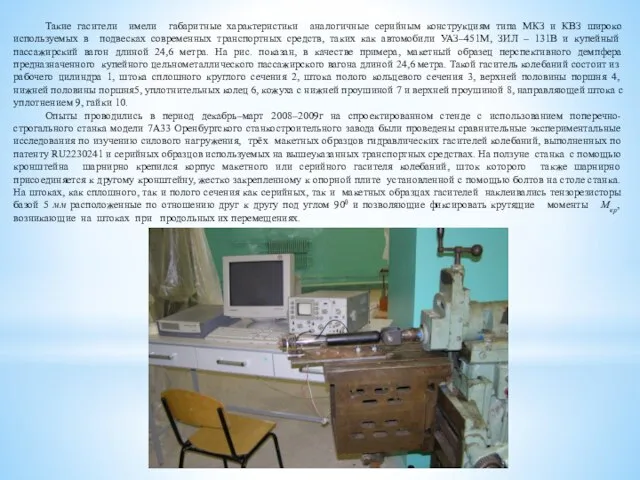
- 14. Такие гасители имели габаритные характеристики аналогичные серийным конструкциям типа МКЗ и КВЗ широко используемых в подвесках
- 15. Подобные тензорезисторы также устанавливались на тензометрических пальцах в местах крепления штоков гасителей к кронштейнам и позволяющие
- 16. На левом рис. представлена осциллограмма характеризующая изменение инерционной силы PИ для серийного и экспериментального гасителя, а
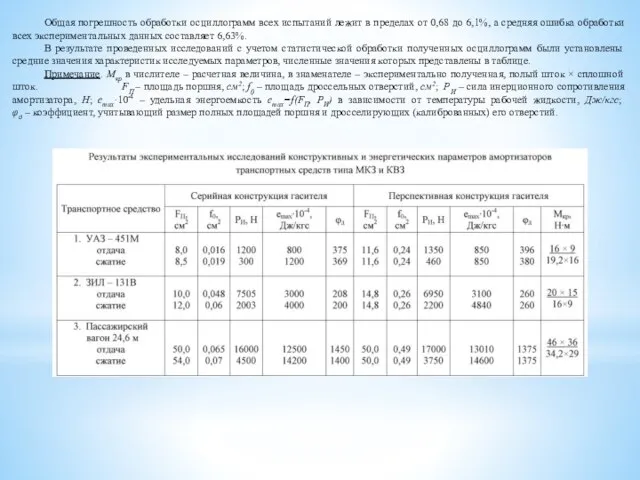
- 17. Общая погрешность обработки осциллограмм всех испытаний лежит в пределах от 0,68 до 6,1%, а средняя ошибка
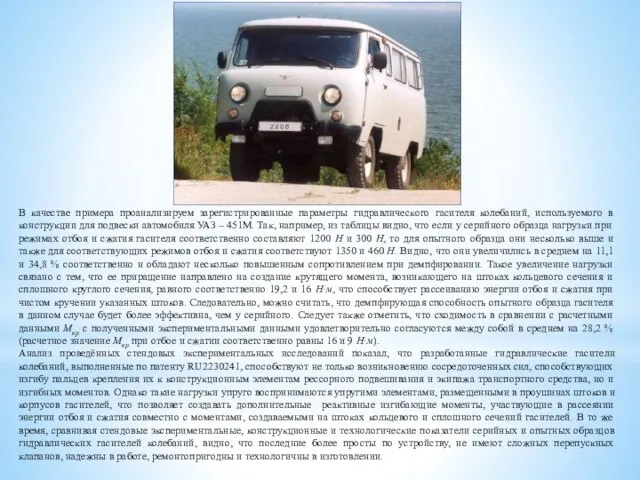
- 18. В качестве примера проанализируем зарегистрированные параметры гидравлического гасителя колебаний, используемого в конструкции для подвески автомобиля УАЗ
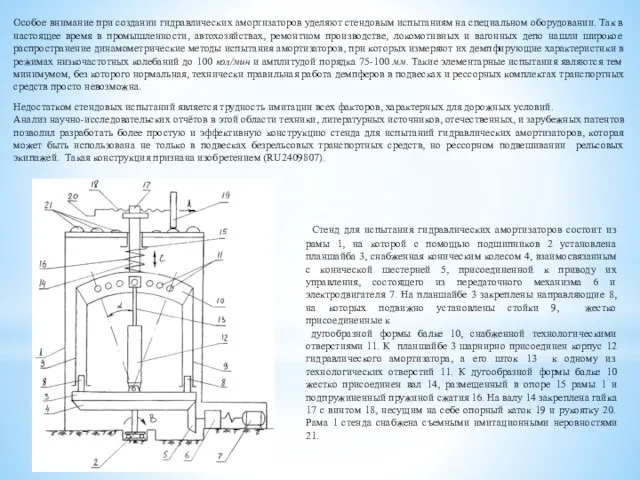
- 19. Особое внимание при создании гидравлических амортизаторов уделяют стендовым испытаниям на специальном оборудовании. Так в настоящее время
- 21. Скачать презентацию
Слайд 2В настоящее время в мировом сообществе широко используется автомобильный и железнодорожный подвижной
В настоящее время в мировом сообществе широко используется автомобильный и железнодорожный подвижной
Слайд 3В современных конструкциях транспортных средств и, в частности, в их рессорном подвешивании
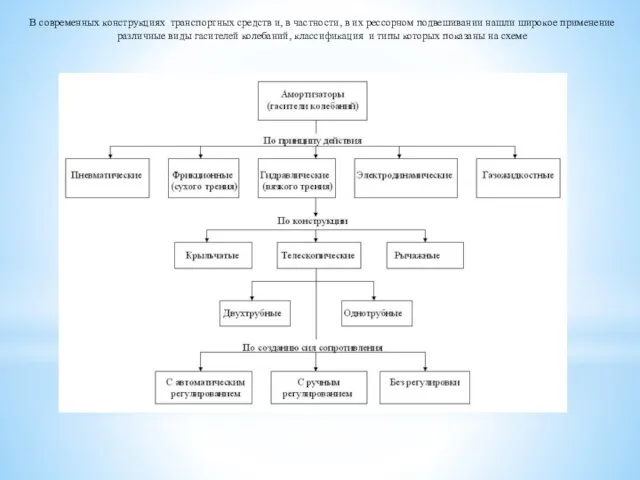
В современных конструкциях транспортных средств и, в частности, в их рессорном подвешивании
Слайд 4Учитывая вышеизложенное, в ЕГУ им. И.А. Бунина совместно с ОрелГТУ, проводится НИР
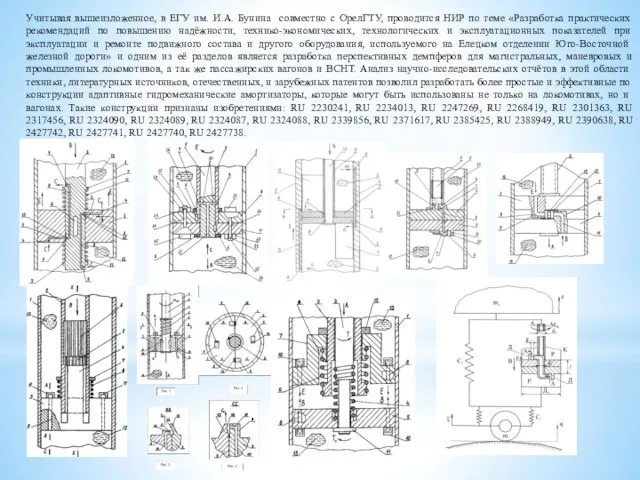
Учитывая вышеизложенное, в ЕГУ им. И.А. Бунина совместно с ОрелГТУ, проводится НИР
Слайд 5Сущность предложенных технических решений заключается в том, что поршни снабжены вертикальными дроссельными
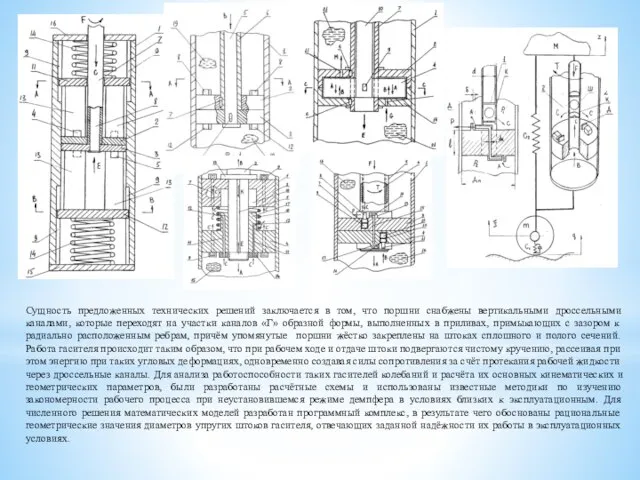
Сущность предложенных технических решений заключается в том, что поршни снабжены вертикальными дроссельными
Слайд 6На основе представленных разработок выполнена и дополнена расширенная классификация демпфирующих устройств адаптивного
На основе представленных разработок выполнена и дополнена расширенная классификация демпфирующих устройств адаптивного
Слайд 7Рассмотрим, в качестве примера, один из вариантов предложенных технических решений (RU2385425), который
Рассмотрим, в качестве примера, один из вариантов предложенных технических решений (RU2385425), который
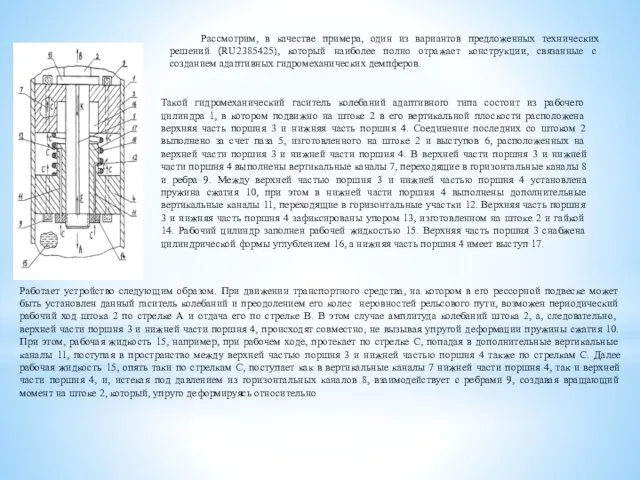
Слайд 8своей продольной оси симметрии, рассеивает энергию рабочего хода в окружающую среду. При
своей продольной оси симметрии, рассеивает энергию рабочего хода в окружающую среду. При
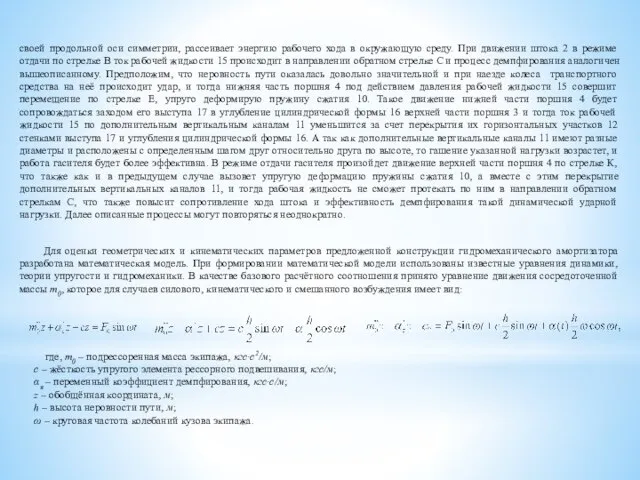
Слайд 9Известно , что коэффициент демпфирования α(t) зависит от гидравлических сопротивлений в дроссельном
Известно , что коэффициент демпфирования α(t) зависит от гидравлических сопротивлений в дроссельном
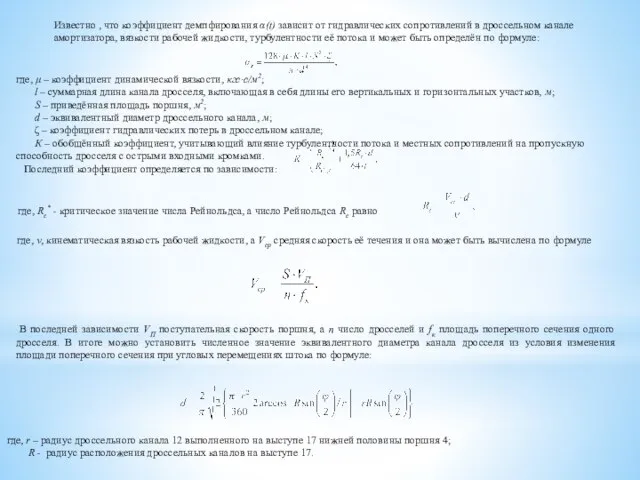
Слайд 10Так как при движении поршня происходит чистое кручение штока, то абсолютный угол
Так как при движении поршня происходит чистое кручение штока, то абсолютный угол

Слайд 11Данная методика апробирована при расчёте рациональных параметров вышеописанной конструкции амортизатора, при которых
Данная методика апробирована при расчёте рациональных параметров вышеописанной конструкции амортизатора, при которых
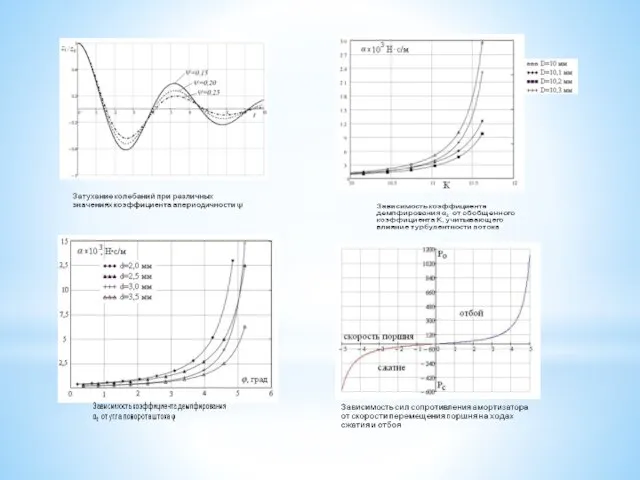
Слайд 13Анализ полученных численных решений и представленных графиков показывает, что эффективность демпфирования колебаний
Анализ полученных численных решений и представленных графиков показывает, что эффективность демпфирования колебаний

Слайд 14Такие гасители имели габаритные характеристики аналогичные серийным конструкциям типа МКЗ и КВЗ
Такие гасители имели габаритные характеристики аналогичные серийным конструкциям типа МКЗ и КВЗ
Слайд 15Подобные тензорезисторы также устанавливались на тензометрических пальцах в местах крепления штоков гасителей
Подобные тензорезисторы также устанавливались на тензометрических пальцах в местах крепления штоков гасителей

Слайд 16На левом рис. представлена осциллограмма характеризующая изменение инерционной силы PИ для серийного
На левом рис. представлена осциллограмма характеризующая изменение инерционной силы PИ для серийного
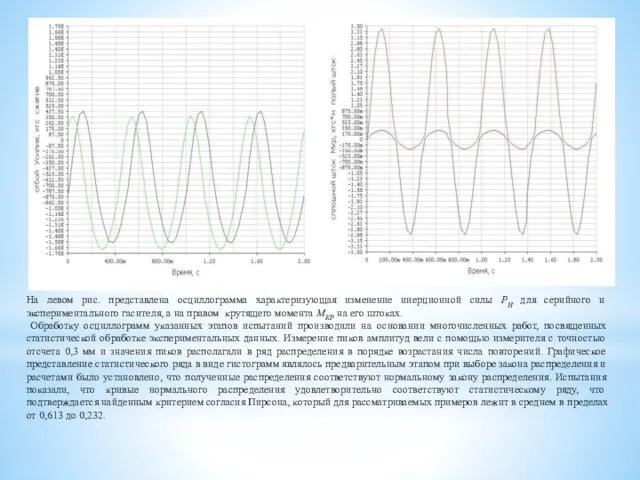
Слайд 17Общая погрешность обработки осциллограмм всех испытаний лежит в пределах от 0,68 до
Общая погрешность обработки осциллограмм всех испытаний лежит в пределах от 0,68 до
Слайд 18В качестве примера проанализируем зарегистрированные параметры гидравлического гасителя колебаний, используемого в конструкции
В качестве примера проанализируем зарегистрированные параметры гидравлического гасителя колебаний, используемого в конструкции
Слайд 19Особое внимание при создании гидравлических амортизаторов уделяют стендовым испытаниям на специальном оборудовании.
Особое внимание при создании гидравлических амортизаторов уделяют стендовым испытаниям на специальном оборудовании.
 События в мире и в Беларуси
События в мире и в Беларуси Тренинг. Суперэнергетика 2.0
Тренинг. Суперэнергетика 2.0 Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса
Анализ реестра значимых программ в Навигаторе дополнительного образования детей Кузбасса Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко
Основные идеи Федерального государственного образовательного стандарта второго поколения на III ступени обучения в сельской шко Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ
Презентация на тему Системы счисления. Систематизация материала и подготовка к ЕГЭ Я и мой ребёнок
Я и мой ребёнок Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин
Направляя Планирование семьи и Репродуктивные права для спасения жизни женщин Гениальность По Заказу – Управление Творческими Процессами
Гениальность По Заказу – Управление Творческими Процессами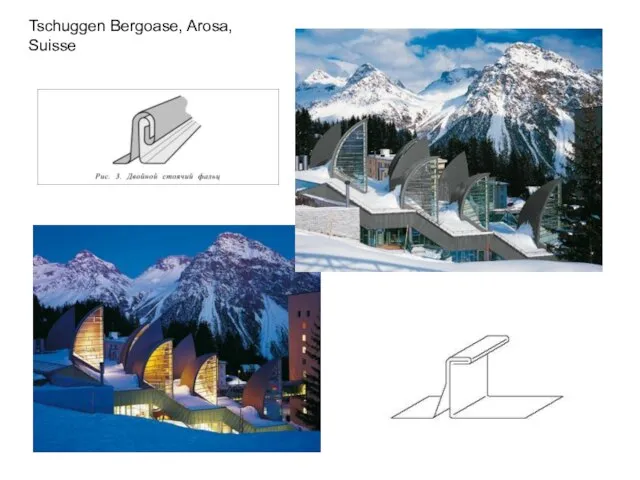 Фасадные материалы
Фасадные материалы Проект информатизации образовательного учреждения
Проект информатизации образовательного учреждения Пойте вместе с нами. Шпаргалка для родителей
Пойте вместе с нами. Шпаргалка для родителей Электромагнит, электронное реле и герконы
Электромагнит, электронное реле и герконы Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае
Базовые аспекты и алгоритмы разработки е-курсов Ту ли потребность удовлетворяет электронный обучающий продукт? Что обеспечивае Виды грибов (1 класс)
Виды грибов (1 класс) Лёгкая атлетика
Лёгкая атлетика День матери
День матери Основные и составные цвета
Основные и составные цвета Сварочный пост и инструмент для сварщика
Сварочный пост и инструмент для сварщика Классификация повреждений деревянных строительных конструкций
Классификация повреждений деревянных строительных конструкций Научные статьи
Научные статьи Технология обработки конструкционных материалов резанием
Технология обработки конструкционных материалов резанием  Легенды
Легенды Нижний Тагил. Спутник
Нижний Тагил. Спутник Рекламная кампания
Рекламная кампания План по продвижению магазина
План по продвижению магазина Хрестики-нулики
Хрестики-нулики Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р
Практические решения развития услуг цифрового ТВ в кабельных сетях. Продвижение продукта и коммуникация с клиентом. Опыт лидера р Презентация на тему Михаил Михайлович Сперанский
Презентация на тему Михаил Михайлович Сперанский