- РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ШАССИ МАЛОГАБАРИТНОГО МОБИЛЬНОГО РОБОТА

Содержание
- 2. Датчики веб-камера Исполнительные устр. два электродвигателя
- 3. Постановка задачи Создать систему управления движением мобильного робота, отвечающую за огибание роботом препятствий на основе метода
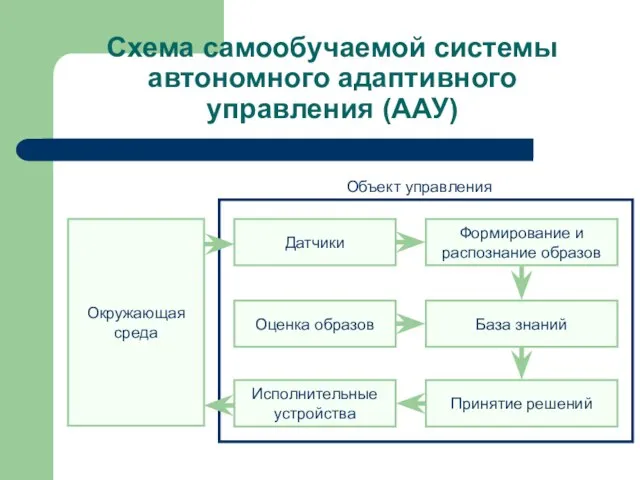
- 4. Схема самообучаемой системы автономного адаптивного управления (ААУ) Принятие решений База знаний Формирование и распознание образов Датчики
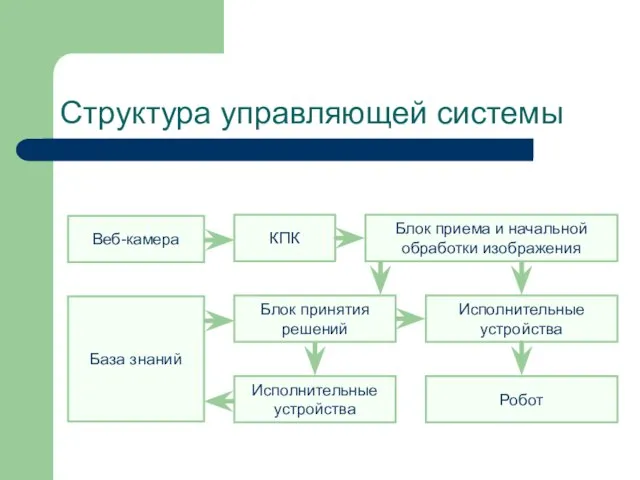
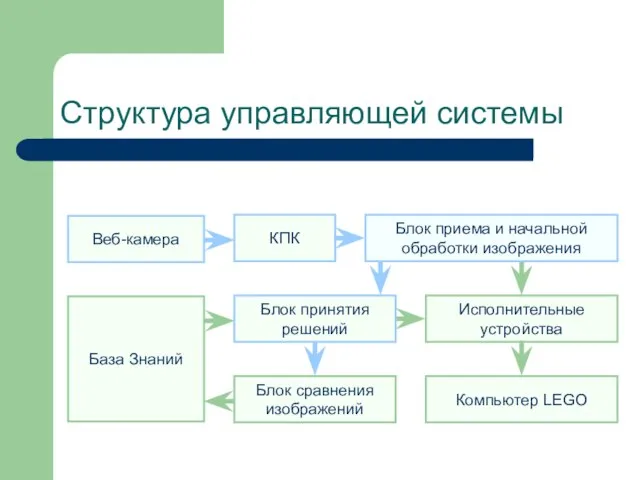
- 5. Структура управляющей системы Робот Исполнительные устройства Блок приема и начальной обработки изображения КПК База знаний Исполнительные
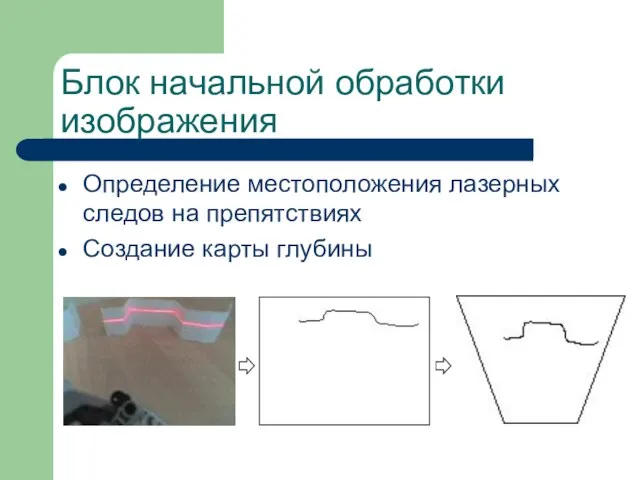
- 6. Определение местоположения лазерных следов на препятствиях Создание карты глубины Блок начальной обработки изображения
- 7. Структура управляющей системы Компьютер LEGO Исполнительные устройства Блок приема и начальной обработки изображения КПК База Знаний
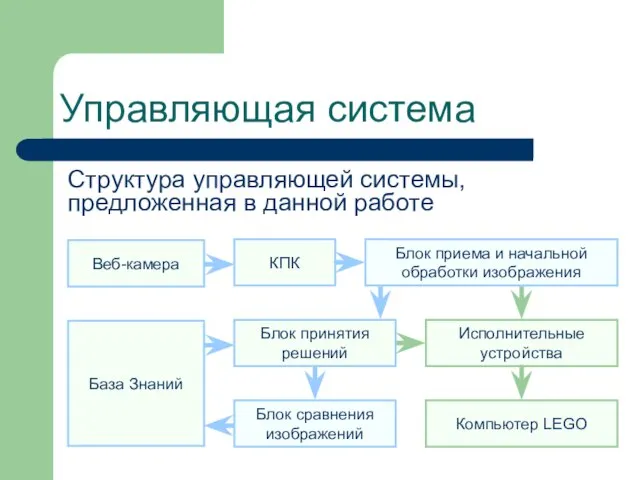
- 8. Управляющая система Компьютер LEGO Исполнительные устройства Блок приема и начальной обработки изображения КПК База Знаний Блок
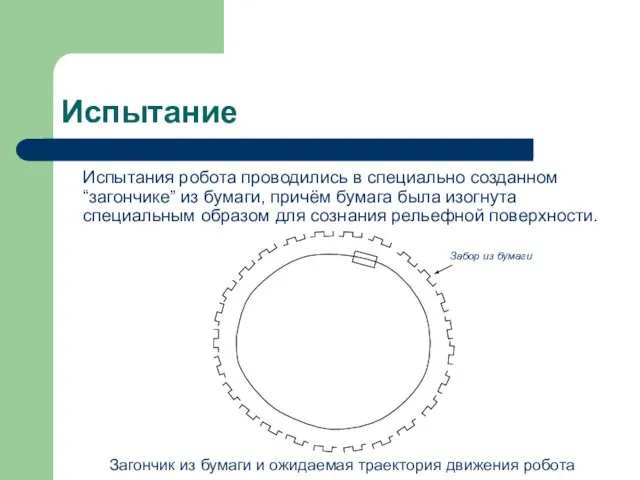
- 9. Испытание Испытания робота проводились в специально созданном “загончике” из бумаги, причём бумага была изогнута специальным образом
- 10. Испытание Зависимость среднего расстояния до препятствия (в миллиметрах) от времени (в секундах). Розовым цветом показано желаемое
- 12. Скачать презентацию

Слайд 3Постановка задачи
Создать систему управления движением мобильного робота, отвечающую за огибание роботом препятствий
Постановка задачи
Создать систему управления движением мобильного робота, отвечающую за огибание роботом препятствий
Слайд 4Схема самообучаемой системы автономного адаптивного управления (ААУ)
Принятие решений
База знаний
Формирование и распознание
Схема самообучаемой системы автономного адаптивного управления (ААУ)
Принятие решений
База знаний
Формирование и распознание
Слайд 5Структура управляющей системы
Робот
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База знаний
Исполнительные устройства
Веб-камера
Блок
Структура управляющей системы
Робот
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База знаний
Исполнительные устройства
Веб-камера
Блок
Слайд 6Определение местоположения лазерных следов на препятствиях
Создание карты глубины
Блок начальной обработки изображения
Определение местоположения лазерных следов на препятствиях
Создание карты глубины
Блок начальной обработки изображения
Слайд 7Структура управляющей системы
Компьютер LEGO
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База Знаний
Блок
Структура управляющей системы
Компьютер LEGO
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База Знаний
Блок
Слайд 8Управляющая система
Компьютер LEGO
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База Знаний
Блок сравнения
Управляющая система
Компьютер LEGO
Исполнительные устройства
Блок приема и начальной обработки изображения
КПК
База Знаний
Блок сравнения
Слайд 9Испытание
Испытания робота проводились в специально созданном “загончике” из бумаги, причём бумага была
Испытание
Испытания робота проводились в специально созданном “загончике” из бумаги, причём бумага была
Слайд 10Испытание
Зависимость среднего расстояния до препятствия (в миллиметрах) от времени (в секундах). Розовым
Испытание
Зависимость среднего расстояния до препятствия (в миллиметрах) от времени (в секундах). Розовым

 Змістовий модуль ІІ. Теорія вихованняТема 1.Суть і зміст процесу виховання. Процес виховання в національній школі
Змістовий модуль ІІ. Теорія вихованняТема 1.Суть і зміст процесу виховання. Процес виховання в національній школі Фитодизайн. Композиции
Фитодизайн. Композиции Лекция-3-русс
Лекция-3-русс Как сберечь свое здоровье?
Как сберечь свое здоровье? Объёмные открытки
Объёмные открытки Использование ЦОР в учебном процессе
Использование ЦОР в учебном процессе АНО «Молодежный театр «Light» Использование театральных методик в профилактике ВИЧ-инфекции
АНО «Молодежный театр «Light» Использование театральных методик в профилактике ВИЧ-инфекции (вычерчивание фигуры непрерывной линией)
(вычерчивание фигуры непрерывной линией) Союз как часть речи
Союз как часть речи Дети Беслана.
Дети Беслана. Юный разработчик. Занятие №9. Сборка. Динозавр
Юный разработчик. Занятие №9. Сборка. Динозавр Кондратий Фёдорович Рылеев
Кондратий Фёдорович Рылеев ЗВЕЗДООБРАЗОВАНИЕ
ЗВЕЗДООБРАЗОВАНИЕ Олимпийская символика
Олимпийская символика Государство и право
Государство и право Презентация на тему Арабы в средние века. Возникновение ислама
Презентация на тему Арабы в средние века. Возникновение ислама  Жаз айлары тақырыбындағы сабақ
Жаз айлары тақырыбындағы сабақ Употребление заглавной буквы в словах 2 класс
Употребление заглавной буквы в словах 2 класс Процессы управления проектами
Процессы управления проектами Мои первые словари
Мои первые словари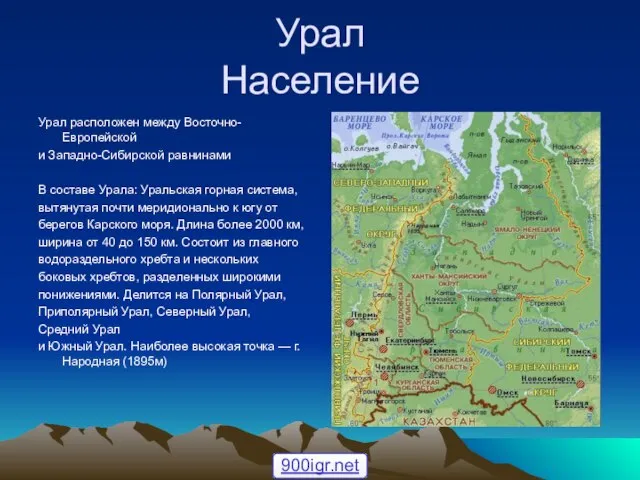 Население Урала
Население Урала Вам дали это. Это и сейчас принадлежит вам. Вы его никогда никому не передавали, но им пользуются все ваши знакомые. Что это такое?
Вам дали это. Это и сейчас принадлежит вам. Вы его никогда никому не передавали, но им пользуются все ваши знакомые. Что это такое? Информация об областном конкурсе научных работ по проблемам развития агропромышленного комплекса.
Информация об областном конкурсе научных работ по проблемам развития агропромышленного комплекса. Внешняя политика России во второй половине 19 века.
Внешняя политика России во второй половине 19 века. Toxicology 1 (4)
Toxicology 1 (4) СОВЕТСКАЯ МУЗЫКА
СОВЕТСКАЯ МУЗЫКА Магниторецепция у человека: теория и практическое применение
Магниторецепция у человека: теория и практическое применение ПИЩЕВЫЕ ДОБАВКИ
ПИЩЕВЫЕ ДОБАВКИ