- робот 15-04 (4) (1)

Содержание
- 2. Заголовок слайда Текст слайда. Текст слайда. Текст слайда. Текст слайда. Текст слайда Текст слайда Текст слайда
- 3. Развитие способностей обучающихся Раннее развитие (мелкая моторика, пространственное мышление, конструирование и т.п.) Общее развитие (командная работа,
- 4. Развитие образовательной робототехники Формулирование содержания предметной области технологии и информатики Создание учебно-методических материалов Оснащение современным оборудованием
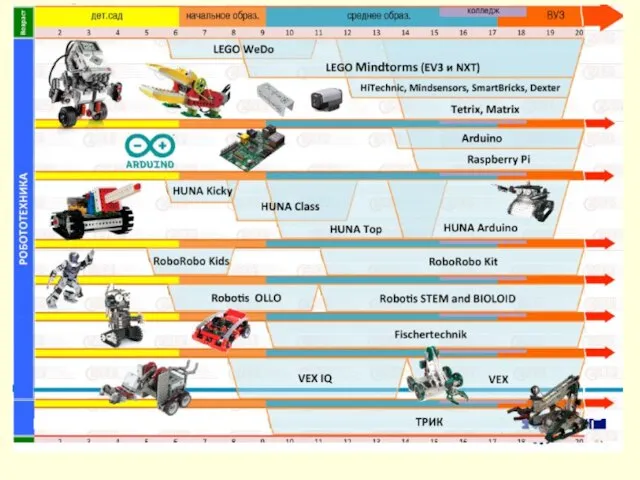
- 5. Виды робототехнических конструкторов Lego Mindstorms NXT Lego Mindstorm EV3 Робототехника на схемах, микроконтроллерах Lego Wedo
- 7. Визуальные среды программирования ЛогоМиры 3.0 LEGO Education WeDo основан на нотации LabVIEW 1-5 класс 5-9 класс
- 8. Групповые занятия
- 9. Микрокомпьютер NXT Микрокомпьютер NXT - это микрокомпьютер, снабженный входными портами для датчиков и выходными портами для
- 10. Основные используемые датчики сервопривод сервопривод сервопривод датчик касания (Touch Sensor) датчик освещенности (Light Sensor) датчик звука
- 12. Скачать презентацию
Слайд 2Заголовок слайда
Текст слайда. Текст слайда. Текст слайда. Текст слайда.
Текст слайда
Текст слайда
Текст слайда
Заголовок слайда
Текст слайда. Текст слайда. Текст слайда. Текст слайда.
Текст слайда
Текст слайда
Текст слайда
Слайд 3Развитие способностей обучающихся
Раннее развитие (мелкая моторика, пространственное мышление, конструирование и т.п.)
Общее развитие
Развитие способностей обучающихся
Раннее развитие (мелкая моторика, пространственное мышление, конструирование и т.п.)
Общее развитие

Слайд 4Развитие образовательной робототехники
Формулирование содержания предметной области технологии и информатики
Создание учебно-методических материалов
Развитие образовательной робототехники
Формулирование содержания предметной области технологии и информатики
Создание учебно-методических материалов

Слайд 5Виды робототехнических конструкторов
Lego Mindstorms NXT
Lego Mindstorm EV3
Робототехника на схемах, микроконтроллерах
Lego Wedo
Виды робототехнических конструкторов
Lego Mindstorms NXT
Lego Mindstorm EV3
Робототехника на схемах, микроконтроллерах
Lego Wedo

Слайд 7Визуальные среды программирования
ЛогоМиры 3.0
LEGO Education WeDo основан на нотации LabVIEW
1-5 класс
5-9 класс
LEGO
Визуальные среды программирования
ЛогоМиры 3.0
LEGO Education WeDo основан на нотации LabVIEW
1-5 класс
5-9 класс
LEGO

Слайд 8Групповые занятия
Групповые занятия

Слайд 9Микрокомпьютер NXT
Микрокомпьютер NXT - это микрокомпьютер, снабженный входными портами для датчиков и
Микрокомпьютер NXT
Микрокомпьютер NXT - это микрокомпьютер, снабженный входными портами для датчиков и

Слайд 10Основные используемые датчики
сервопривод
сервопривод
сервопривод
датчик касания
(Touch Sensor)
датчик освещенности
(Light Sensor)
датчик звука
(Sound Sensor)
ультразвуковой датчик
(Ultrasonic Sensor)
Кафедра технологии
Основные используемые датчики
сервопривод
сервопривод
сервопривод
датчик касания
(Touch Sensor)
датчик освещенности
(Light Sensor)
датчик звука
(Sound Sensor)
ультразвуковой датчик
(Ultrasonic Sensor)
Кафедра технологии

 Презентация на тему Что растет на клумбе (1 класс)
Презентация на тему Что растет на клумбе (1 класс) Как диагностировать и лечить инфекцию Helicobacter pylori
Как диагностировать и лечить инфекцию Helicobacter pylori Алексей Константинович Толстой
Алексей Константинович Толстой Презентация на тему Однокоренные слова 1 класс
Презентация на тему Однокоренные слова 1 класс 4 фактори успішного дослідження ринку в охороні здоров’я Павло ковтонюк
4 фактори успішного дослідження ринку в охороні здоров’я Павло ковтонюк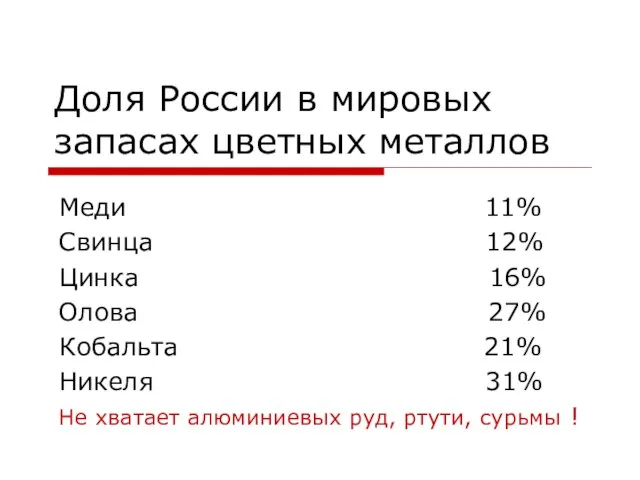 Доля России в мировых запасах цветных металлов
Доля России в мировых запасах цветных металлов Һәр әйбернең үз үрыны бар
Һәр әйбернең үз үрыны бар game-4
game-4 Наблюдения за погодой природные явления Сила и направление ветра Урок-обобщение
Наблюдения за погодой природные явления Сила и направление ветра Урок-обобщение Презентация на тему Морфемика и словообразование
Презентация на тему Морфемика и словообразование ИРЦ по модели «Информационно – культурный центр как средство для обеспечения доступности и открытости образования»
ИРЦ по модели «Информационно – культурный центр как средство для обеспечения доступности и открытости образования» Деревья
Деревья ОСНОВНІ ПРАВИЛА НАБОРУ ТЕКСТУ В ТЕКСТОВОМУ РЕДАКТОРІ Microsoft Word. - презентация
ОСНОВНІ ПРАВИЛА НАБОРУ ТЕКСТУ В ТЕКСТОВОМУ РЕДАКТОРІ Microsoft Word. - презентация Кристина Кузьмина 10а. - презентация
Кристина Кузьмина 10а. - презентация Sun-Moon-and-Earth-Overview-Differentiated-Lesson
Sun-Moon-and-Earth-Overview-Differentiated-Lesson Merger Samara State National Research University
Merger Samara State National Research University О работе исполнительной дирекции и финансовой деятельности АСДГ в 2009 году. О плане работы и проекте бюджета на 2010 год
О работе исполнительной дирекции и финансовой деятельности АСДГ в 2009 году. О плане работы и проекте бюджета на 2010 год RPR_1-1
RPR_1-1 «Блог - инструментарий популярности или продаж? Реальность и мифы о UGC»
«Блог - инструментарий популярности или продаж? Реальность и мифы о UGC» Статус систем синхротронов У70 / У1.5, существенных для ускорения пучка p?
Статус систем синхротронов У70 / У1.5, существенных для ускорения пучка p? Time management
Time management Презентация на тему ПЕРВОБЫТНОЕ ИСКУССТВО На заре человечества
Презентация на тему ПЕРВОБЫТНОЕ ИСКУССТВО На заре человечества  А ЗА ОКНАМИ ТЕМНО…(((... --- …)))
А ЗА ОКНАМИ ТЕМНО…(((... --- …))) оптимизация минерального питания озимой пшеницы в весенний период 2012 года с учетом агрохимических показателей почв
оптимизация минерального питания озимой пшеницы в весенний период 2012 года с учетом агрохимических показателей почв Современный стратегический анализ
Современный стратегический анализ Кляксография и монотипия
Кляксография и монотипия Тема учебного проекта: Светофор
Тема учебного проекта: Светофор ООО Теплоконструктор
ООО Теплоконструктор