- Системы автоматического управления

Содержание
- 2. Содержание Примеры систем авт. регулирования Примеры систем авт. управления
- 3. Системы автоматического регулирования Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход
- 4. Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих
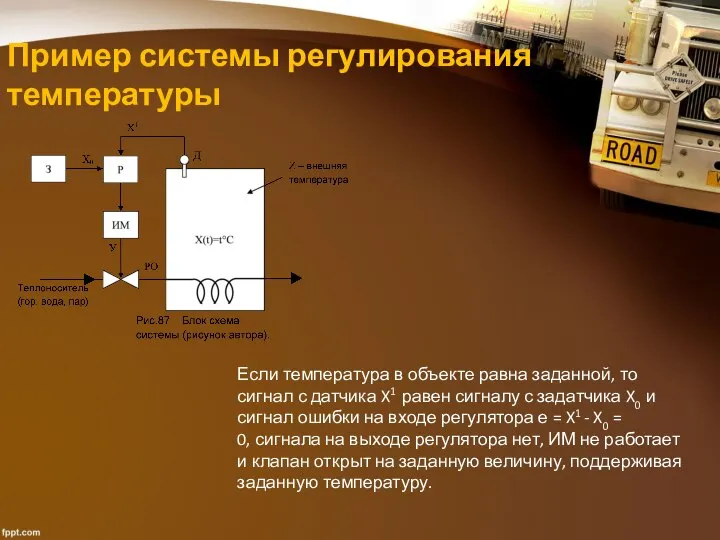
- 5. Пример системы регулирования температуры Если температура в объекте равна заданной, то сигнал с датчика X1 равен
- 6. Функциональная схема САР З – задатчик, для установки заданного значения параметра X0 Д – датчик (термопара,
- 7. Сигнал с задатчика может быть: -постоянным X0 = const. для поддержание постоянства регулируемого параметра температуры, давления,
- 8. Системы автоматического управления Система автоматического управления представляет собой совокупность объекта управления (ОУ) и управляющего устройства, включающего
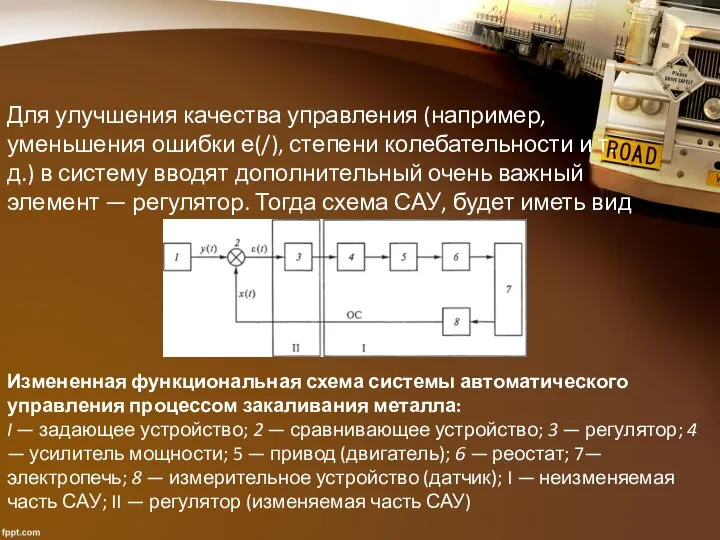
- 9. Для улучшения качества управления (например, уменьшения ошибки е(/), степени колебательности и т.д.) в систему вводят дополнительный
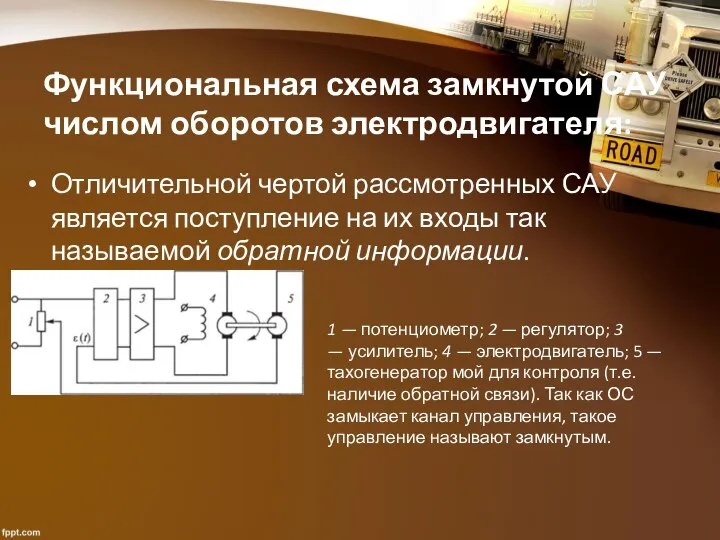
- 10. Функциональная схема замкнутой САУ числом оборотов электродвигателя: Отличительной чертой рассмотренных САУ является поступление на их входы
- 11. При управлении с ОС значение управляющей переменной постоянно сопоставляется с ее заданным (эталонным) значением. Цель управления
- 12. Список литературы Агравал, Г.П. Системы автоматического управления: теория, применение, моделирование в MATLAB: Учебное пособие / Г.П.
- 14. Скачать презентацию

Слайд 3Системы автоматического регулирования
Системы автоматического регулирования
(САР) применяются для регулирования отдельных параметров (температура,
Системы автоматического регулирования
Системы автоматического регулирования
(САР) применяются для регулирования отдельных параметров (температура,
Слайд 4Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать
Слайд 5Пример системы регулирования температуры
Если температура в объекте равна заданной, то сигнал с
Пример системы регулирования температуры
Если температура в объекте равна заданной, то сигнал с
Слайд 6Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик
Функциональная схема САР
З – задатчик, для установки заданного значения параметра X0
Д – датчик

Слайд 7Сигнал с задатчика может быть:
-постоянным X0 = const. для поддержание постоянства регулируемого параметра температуры, давления,
Сигнал с задатчика может быть:
-постоянным X0 = const. для поддержание постоянства регулируемого параметра температуры, давления,
Слайд 8Системы автоматического управления
Система автоматического управления представляет собой совокупность объекта управления (ОУ) и
Системы автоматического управления
Система автоматического управления представляет собой совокупность объекта управления (ОУ) и
Слайд 9Для улучшения качества управления (например, уменьшения ошибки е(/), степени колебательности и т.д.)
Для улучшения качества управления (например, уменьшения ошибки е(/), степени колебательности и т.д.)
Слайд 10Функциональная схема замкнутой САУ числом оборотов электродвигателя:
Отличительной чертой рассмотренных САУ является поступление
Функциональная схема замкнутой САУ числом оборотов электродвигателя:
Отличительной чертой рассмотренных САУ является поступление
Слайд 11При управлении с ОС значение управляющей переменной постоянно сопоставляется с ее заданным
При управлении с ОС значение управляющей переменной постоянно сопоставляется с ее заданным
Слайд 12Список литературы
Агравал, Г.П. Системы автоматического управления: теория, применение, моделирование в MATLAB: Учебное
Список литературы
Агравал, Г.П. Системы автоматического управления: теория, применение, моделирование в MATLAB: Учебное
 Презентация на тему Что растет на клумбе (1 класс)
Презентация на тему Что растет на клумбе (1 класс) Как диагностировать и лечить инфекцию Helicobacter pylori
Как диагностировать и лечить инфекцию Helicobacter pylori Алексей Константинович Толстой
Алексей Константинович Толстой Презентация на тему Однокоренные слова 1 класс
Презентация на тему Однокоренные слова 1 класс 4 фактори успішного дослідження ринку в охороні здоров’я Павло ковтонюк
4 фактори успішного дослідження ринку в охороні здоров’я Павло ковтонюк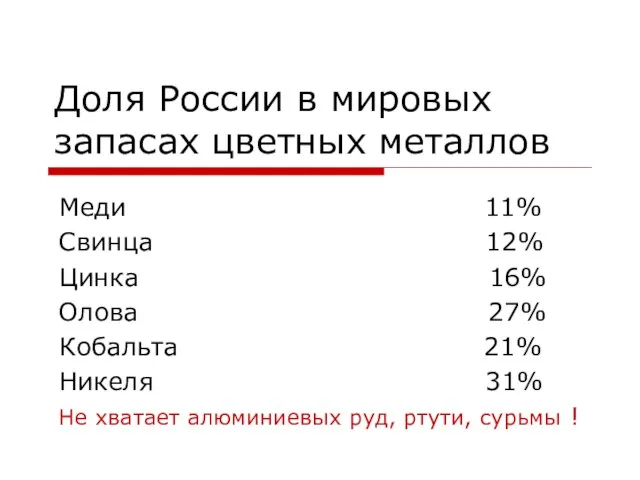 Доля России в мировых запасах цветных металлов
Доля России в мировых запасах цветных металлов Һәр әйбернең үз үрыны бар
Һәр әйбернең үз үрыны бар game-4
game-4 Наблюдения за погодой природные явления Сила и направление ветра Урок-обобщение
Наблюдения за погодой природные явления Сила и направление ветра Урок-обобщение Презентация на тему Морфемика и словообразование
Презентация на тему Морфемика и словообразование ИРЦ по модели «Информационно – культурный центр как средство для обеспечения доступности и открытости образования»
ИРЦ по модели «Информационно – культурный центр как средство для обеспечения доступности и открытости образования» Деревья
Деревья ОСНОВНІ ПРАВИЛА НАБОРУ ТЕКСТУ В ТЕКСТОВОМУ РЕДАКТОРІ Microsoft Word. - презентация
ОСНОВНІ ПРАВИЛА НАБОРУ ТЕКСТУ В ТЕКСТОВОМУ РЕДАКТОРІ Microsoft Word. - презентация Кристина Кузьмина 10а. - презентация
Кристина Кузьмина 10а. - презентация Sun-Moon-and-Earth-Overview-Differentiated-Lesson
Sun-Moon-and-Earth-Overview-Differentiated-Lesson Merger Samara State National Research University
Merger Samara State National Research University О работе исполнительной дирекции и финансовой деятельности АСДГ в 2009 году. О плане работы и проекте бюджета на 2010 год
О работе исполнительной дирекции и финансовой деятельности АСДГ в 2009 году. О плане работы и проекте бюджета на 2010 год RPR_1-1
RPR_1-1 «Блог - инструментарий популярности или продаж? Реальность и мифы о UGC»
«Блог - инструментарий популярности или продаж? Реальность и мифы о UGC» Статус систем синхротронов У70 / У1.5, существенных для ускорения пучка p?
Статус систем синхротронов У70 / У1.5, существенных для ускорения пучка p? Time management
Time management Презентация на тему ПЕРВОБЫТНОЕ ИСКУССТВО На заре человечества
Презентация на тему ПЕРВОБЫТНОЕ ИСКУССТВО На заре человечества  А ЗА ОКНАМИ ТЕМНО…(((... --- …)))
А ЗА ОКНАМИ ТЕМНО…(((... --- …))) оптимизация минерального питания озимой пшеницы в весенний период 2012 года с учетом агрохимических показателей почв
оптимизация минерального питания озимой пшеницы в весенний период 2012 года с учетом агрохимических показателей почв Современный стратегический анализ
Современный стратегический анализ Кляксография и монотипия
Кляксография и монотипия Тема учебного проекта: Светофор
Тема учебного проекта: Светофор ООО Теплоконструктор
ООО Теплоконструктор