- Системы динамометрирования

Содержание
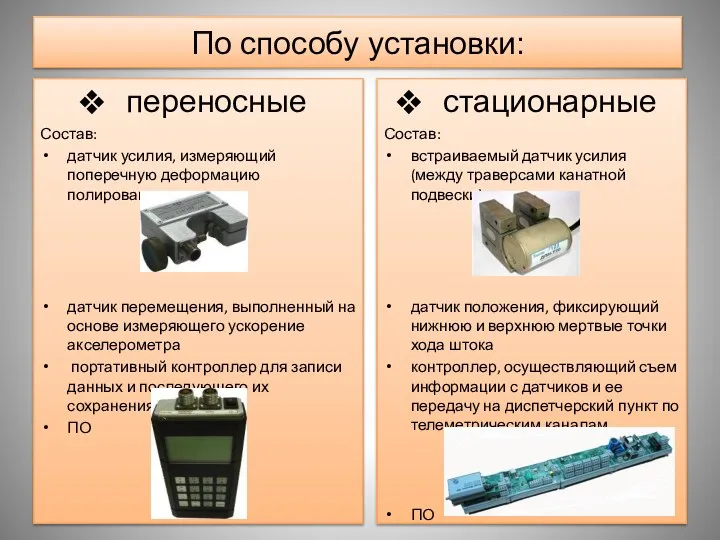
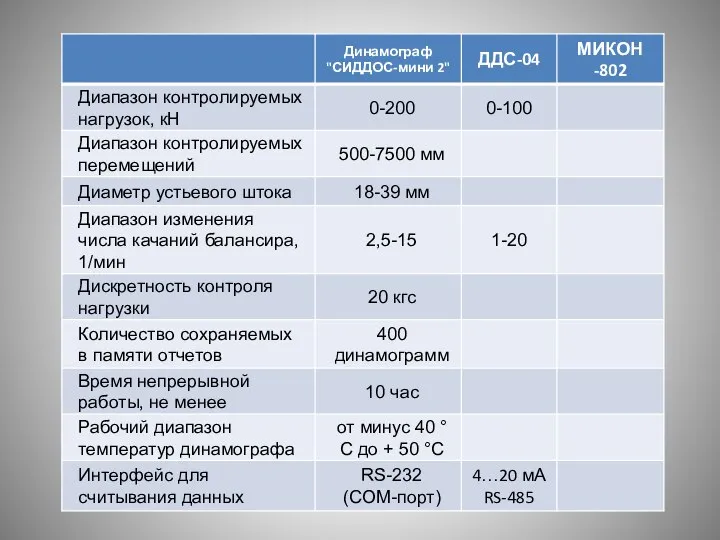
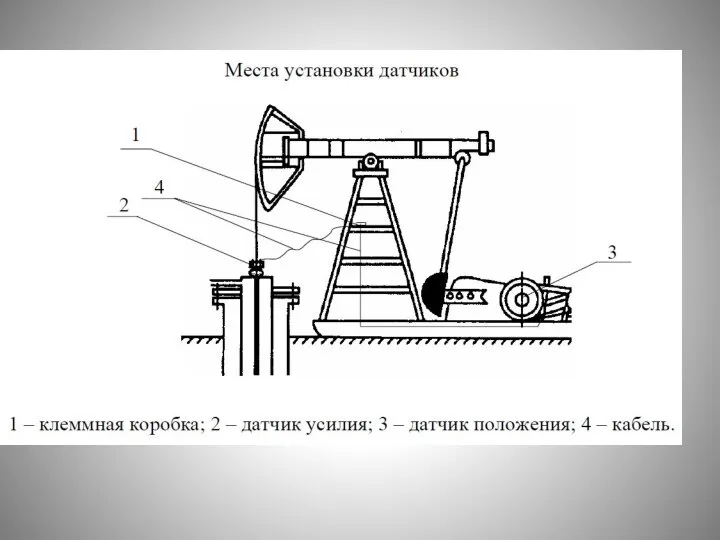
- 2. стационарные Состав: встраиваемый датчик усилия (между траверсами канатной подвески) датчик положения, фиксирующий нижнюю и верхнюю мертвые
- 4. Стационарная система динамометрирования (НПФ «Интек», г.Уфа) Назначение системы: · Автоматический расчет фактического суточного дебита скважины с
- 5. Стационарная система динамометрирования (НПФ «Интек», г.Уфа) Назначение системы: · Автоматический расчет фактического суточного дебита скважины с
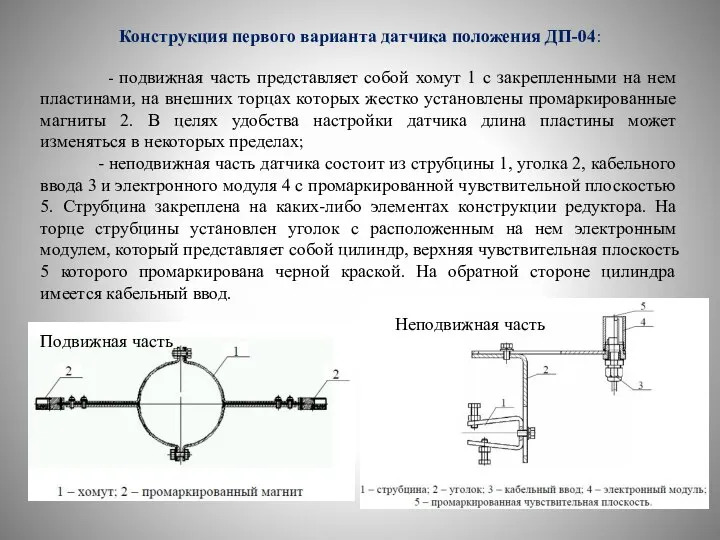
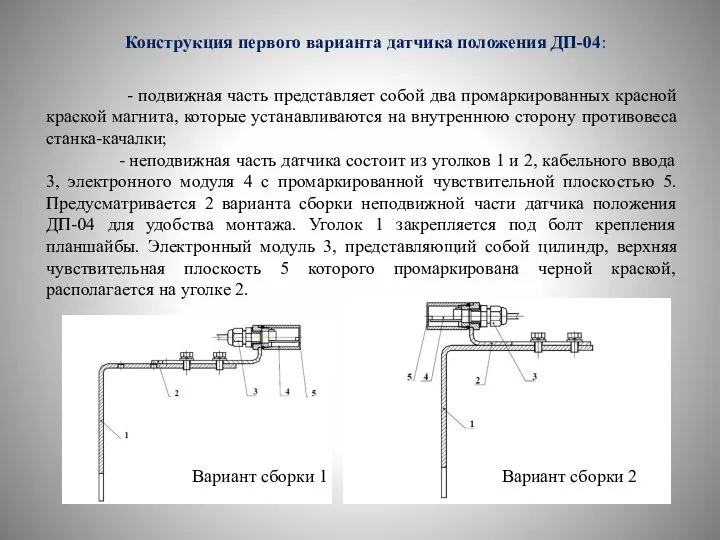
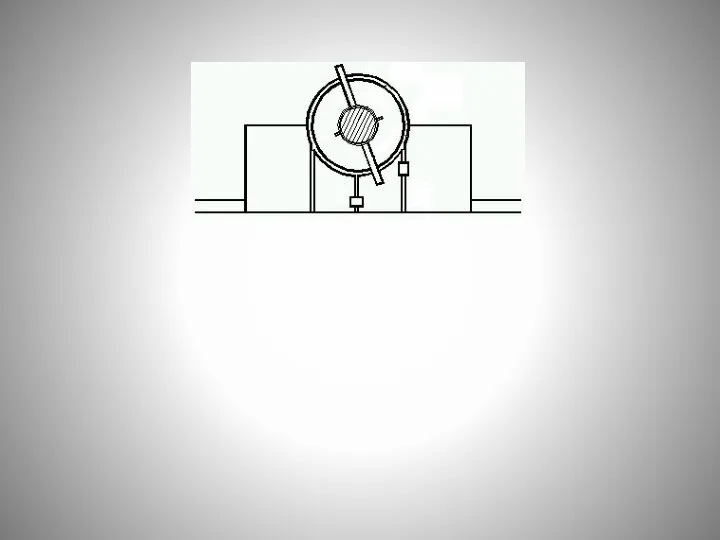
- 9. Конструкция первого варианта датчика положения ДП-04: - подвижная часть представляет собой хомут 1 с закрепленными на
- 10. - подвижная часть представляет собой два промаркированных красной краской магнита, которые устанавливаются на внутреннюю сторону противовеса
- 13. Скачать презентацию
Слайд 2 стационарные
Состав:
встраиваемый датчик усилия (между траверсами канатной подвески)
датчик положения, фиксирующий нижнюю и
стационарные
Состав:
встраиваемый датчик усилия (между траверсами канатной подвески)
датчик положения, фиксирующий нижнюю и
Слайд 4Стационарная система динамометрирования
(НПФ «Интек», г.Уфа)
Назначение системы:
· Автоматический расчет фактического суточного дебита скважины с
Стационарная система динамометрирования
(НПФ «Интек», г.Уфа)
Назначение системы:
· Автоматический расчет фактического суточного дебита скважины с
Слайд 5Стационарная система динамометрирования
(НПФ «Интек», г.Уфа)
Назначение системы:
· Автоматический расчет фактического суточного дебита скважины с
Стационарная система динамометрирования
(НПФ «Интек», г.Уфа)
Назначение системы:
· Автоматический расчет фактического суточного дебита скважины с
Слайд 9Конструкция первого варианта датчика положения ДП-04:
- подвижная часть представляет собой
Конструкция первого варианта датчика положения ДП-04:
- подвижная часть представляет собой
- подвижная часть представляет собой
Слайд 10- подвижная часть представляет собой два промаркированных красной краской магнита, которые устанавливаются
- подвижная часть представляет собой два промаркированных красной краской магнита, которые устанавливаются
 Qué fecha es hoy
Qué fecha es hoy Специфика управленческой мысли в работах П.М.Керженцева (4 августа 1881— 2 июня 1940)
Специфика управленческой мысли в работах П.М.Керженцева (4 августа 1881— 2 июня 1940) ІНДИВІДУАЛЬНИЙ МАРКЕТИНГ
ІНДИВІДУАЛЬНИЙ МАРКЕТИНГ  VIII общешкольная конференция «Учись учиться»
VIII общешкольная конференция «Учись учиться» Дистанционное обучение
Дистанционное обучение «Екатеринодарский покров - оберег» г. Краснодар, 2011 г
«Екатеринодарский покров - оберег» г. Краснодар, 2011 г Стратегические игры как тренажёр для лидеров
Стратегические игры как тренажёр для лидеров ЧТО ДЕЛАЕТ МИШКА?
ЧТО ДЕЛАЕТ МИШКА? Педсовет. Диагностика личности преподавателя и мониторинг его образовательной деятельности
Педсовет. Диагностика личности преподавателя и мониторинг его образовательной деятельности Мой первый проект!
Мой первый проект! Особенности регионального ранжирования Яндекса. Украинская формула
Особенности регионального ранжирования Яндекса. Украинская формула Презентация на тему ОБЩАЯ ХАРАКТЕРИСТИКА ГРАЖДАНСКИХ ПРАВООТНОШЕНИЙ
Презентация на тему ОБЩАЯ ХАРАКТЕРИСТИКА ГРАЖДАНСКИХ ПРАВООТНОШЕНИЙ  Return to roots by harnessing digital technology
Return to roots by harnessing digital technology Токсичность общения в коллективе или как я люблю обратную связь
Токсичность общения в коллективе или как я люблю обратную связь Простые дроби. Повторение и обобщение
Простые дроби. Повторение и обобщение Имя прилагательное
Имя прилагательное Удивительная чувашская вышивка
Удивительная чувашская вышивка Системные механизмы Windows
Системные механизмы Windows Опытно -
Опытно - Надводно-подводный дисковый отель Water Discus Hotel
Надводно-подводный дисковый отель Water Discus Hotel Психология организации труда в целях управления трудовой деятельности
Психология организации труда в целях управления трудовой деятельности Мчит по рельсам электричка
Мчит по рельсам электричка Современные гаджеты
Современные гаджеты Кинесика как составной элемент невербальной коммуникации
Кинесика как составной элемент невербальной коммуникации Мы приветствуем ВАС!!!
Мы приветствуем ВАС!!! К пункту 5 Программы Презентации Рабочей группы по Корпоративному управлению
К пункту 5 Программы Презентации Рабочей группы по Корпоративному управлению Энергосбережение при грануляции металлургического шлака
Энергосбережение при грануляции металлургического шлака Путешествие в мир полезных растений
Путешествие в мир полезных растений