- Структура и программная реализация цифровых фильтров и регуляторов

Содержание
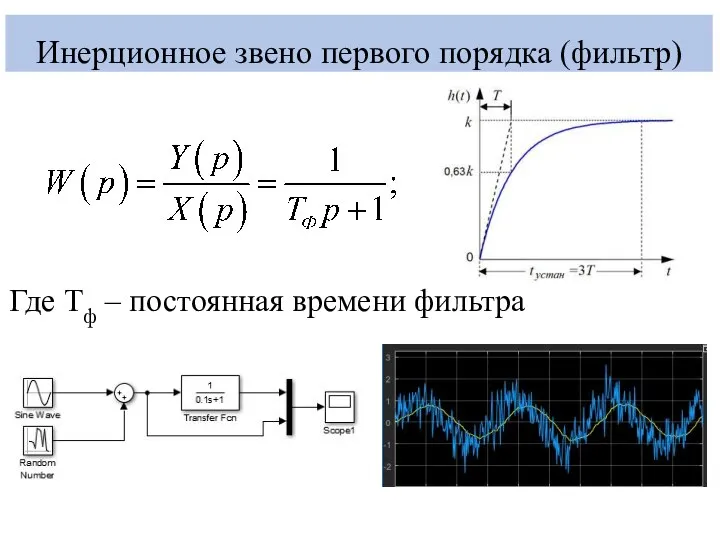
- 2. Инерционное звено первого порядка (фильтр) Где Тф – постоянная времени фильтра
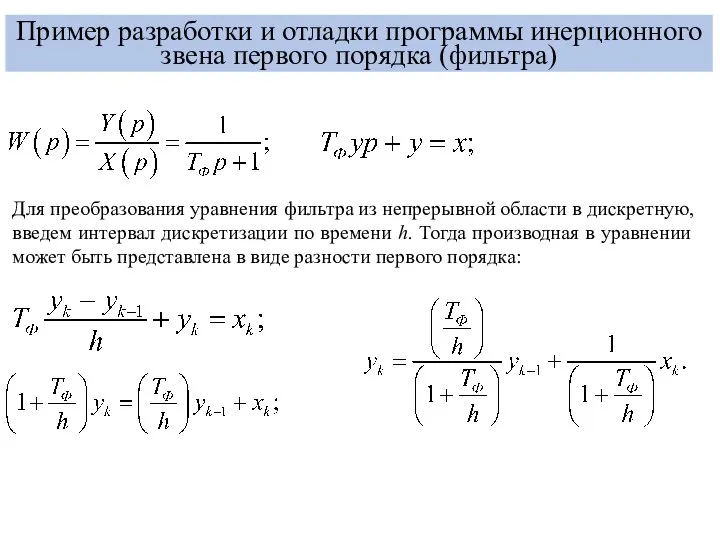
- 3. Пример разработки и отладки программы инерционного звена первого порядка (фильтра) Для преобразования уравнения фильтра из непрерывной
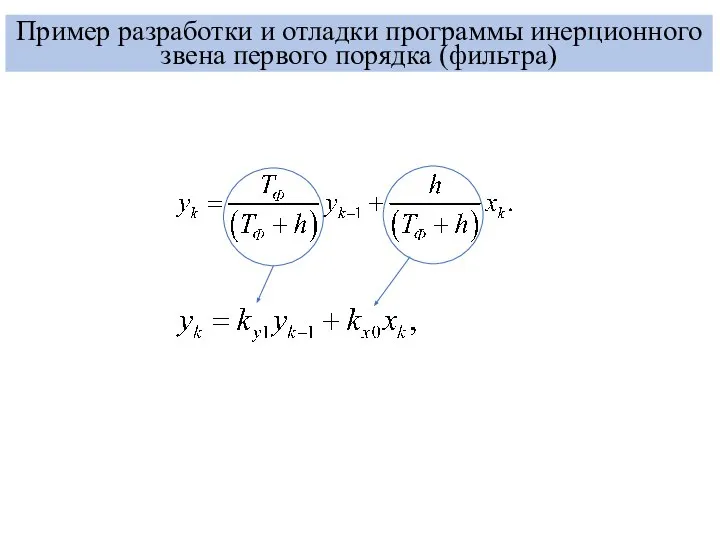
- 4. Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
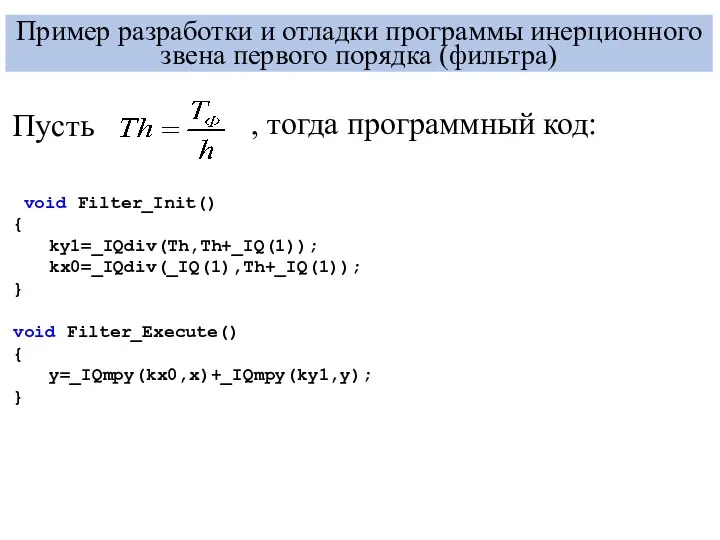
- 5. Пример разработки и отладки программы инерционного звена первого порядка (фильтра) void Filter_Init() { ky1=_IQdiv(Th,Th+_IQ(1)); kx0=_IQdiv(_IQ(1),Th+_IQ(1)); }
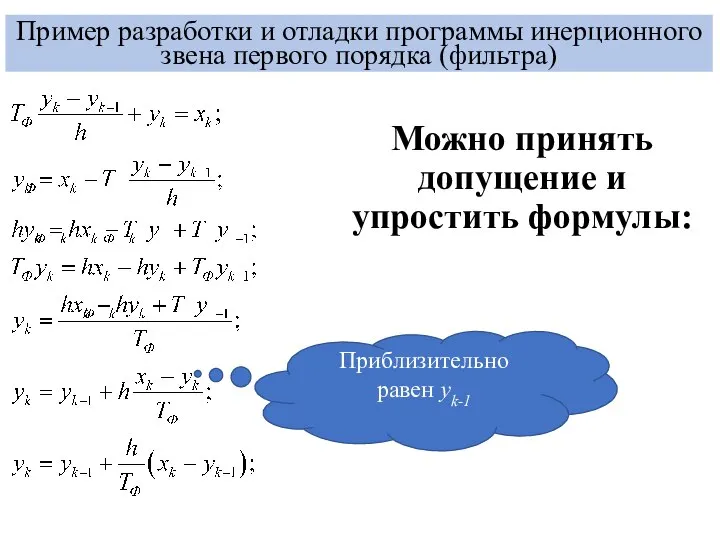
- 6. Пример разработки и отладки программы инерционного звена первого порядка (фильтра) Можно принять допущение и упростить формулы:
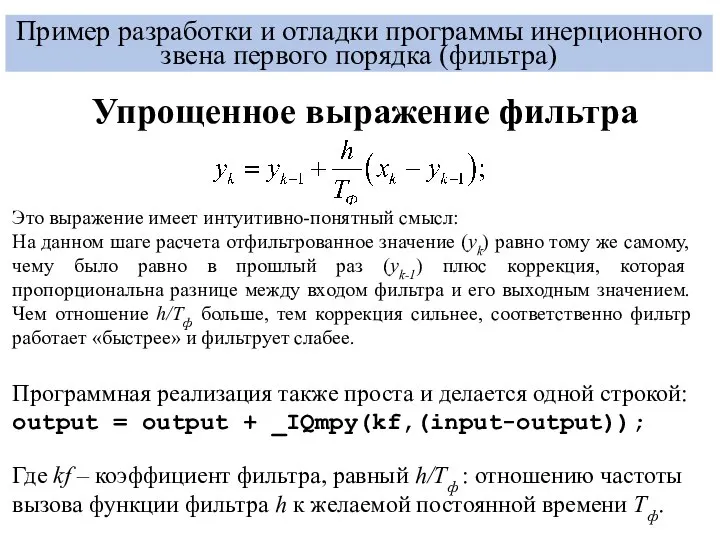
- 7. Пример разработки и отладки программы инерционного звена первого порядка (фильтра) Упрощенное выражение фильтра Это выражение имеет
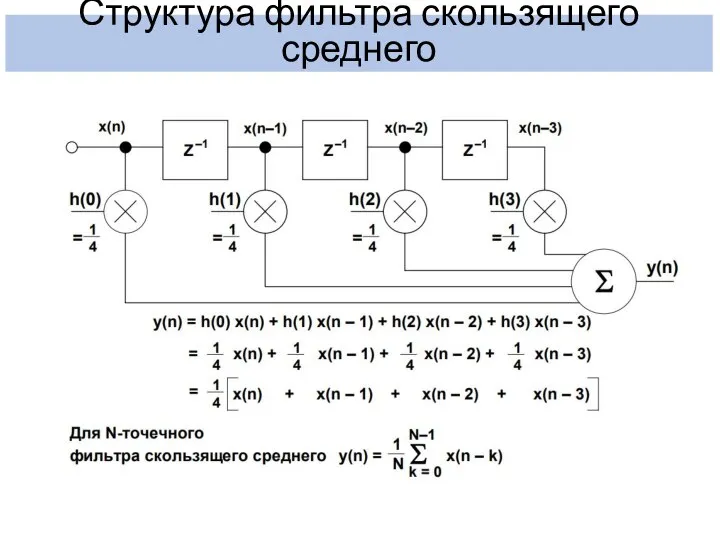
- 8. Структура фильтра скользящего среднего
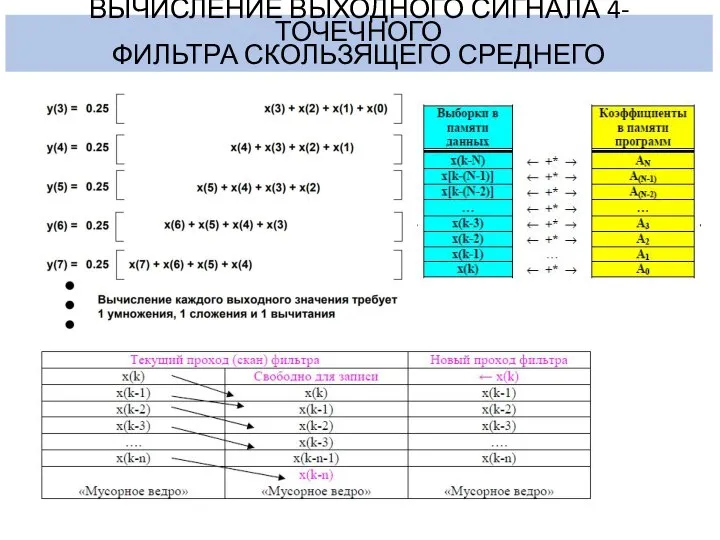
- 9. ВЫЧИСЛЕНИЕ ВЫХОДНОГО СИГНАЛА 4-ТОЧЕЧНОГО ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО
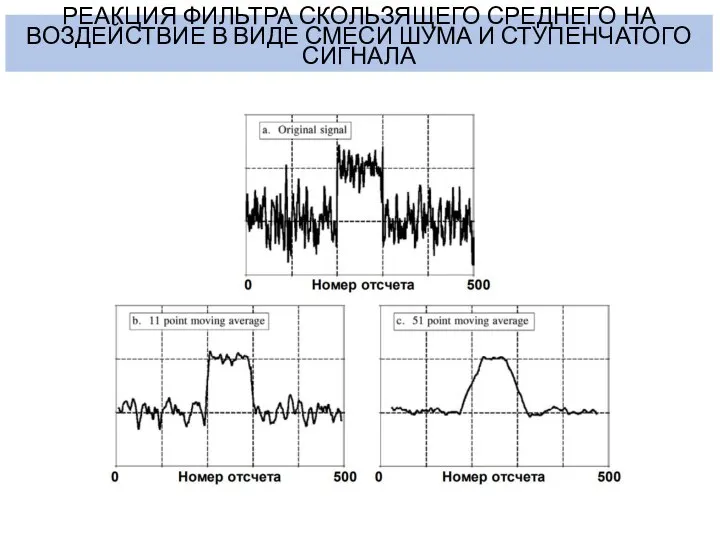
- 10. РЕАКЦИЯ ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО НА ВОЗДЕЙСТВИЕ В ВИДЕ СМЕСИ ШУМА И СТУПЕНЧАТОГО СИГНАЛА
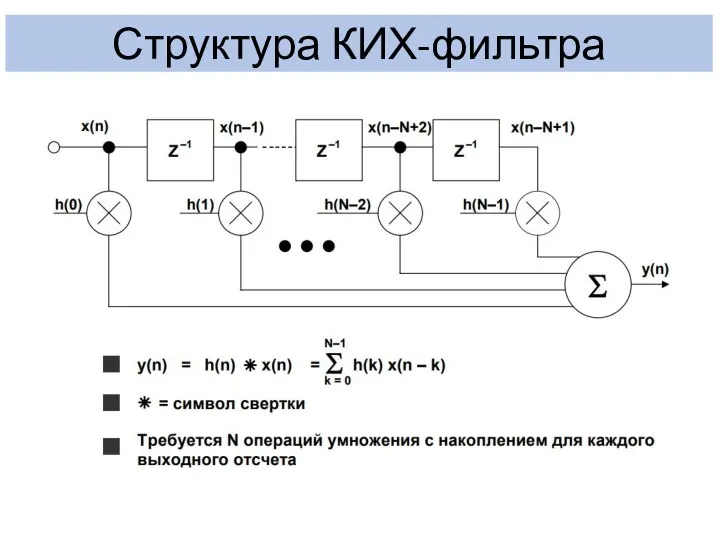
- 11. Структура КИХ-фильтра
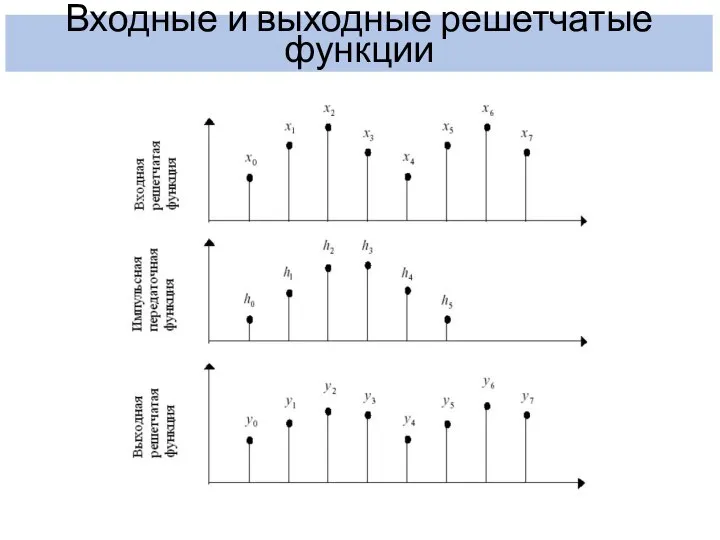
- 12. Входные и выходные решетчатые функции
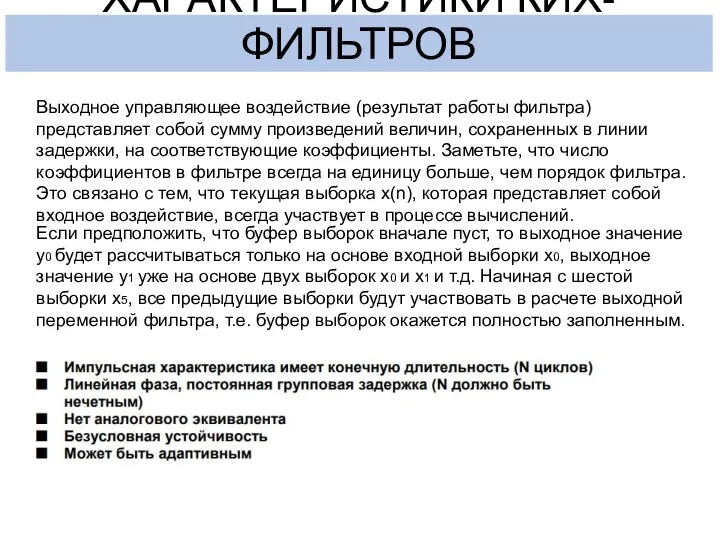
- 13. ХАРАКТЕРИСТИКИ КИХ-ФИЛЬТРОВ Выходное управляющее воздействие (результат работы фильтра) представляет собой сумму произведений величин, сохраненных в линии
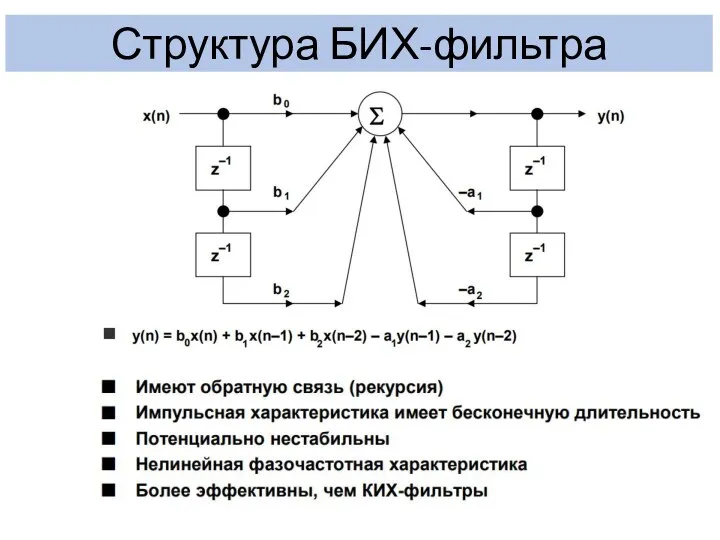
- 14. Структура БИХ-фильтра
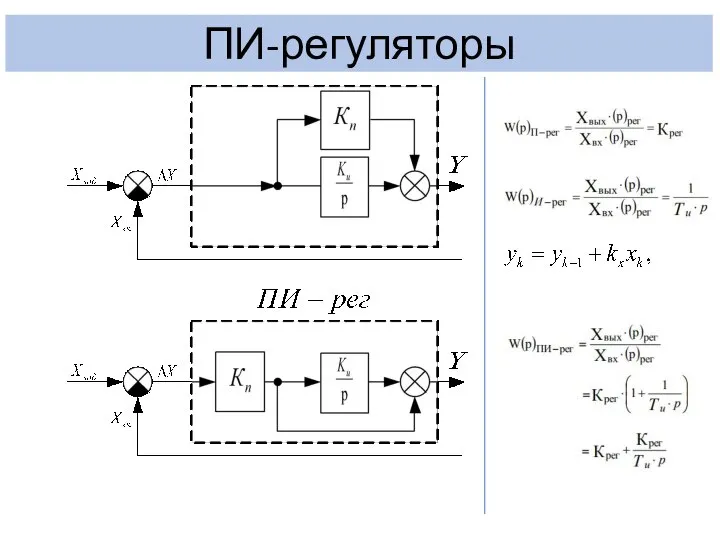
- 15. ПИ-регуляторы
- 17. Скачать презентацию
Слайд 3Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Для преобразования уравнения
Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Для преобразования уравнения
Слайд 4Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Слайд 5Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
void Filter_Init()
{
ky1=_IQdiv(Th,Th+_IQ(1));
kx0=_IQdiv(_IQ(1),Th+_IQ(1));
}
void Filter_Execute()
{
y=_IQmpy(kx0,x)+_IQmpy(ky1,y);
}
Пусть
,
Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
void Filter_Init()
{
ky1=_IQdiv(Th,Th+_IQ(1));
kx0=_IQdiv(_IQ(1),Th+_IQ(1));
}
void Filter_Execute()
{
y=_IQmpy(kx0,x)+_IQmpy(ky1,y);
}
Пусть
,
Слайд 6Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Можно принять допущение
Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Можно принять допущение
Слайд 7Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Упрощенное выражение фильтра
Это
Пример разработки и отладки программы инерционного звена первого порядка (фильтра)
Упрощенное выражение фильтра
Это
Слайд 8Структура фильтра скользящего среднего
Структура фильтра скользящего среднего
Слайд 9ВЫЧИСЛЕНИЕ ВЫХОДНОГО СИГНАЛА 4-ТОЧЕЧНОГО
ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО
ВЫЧИСЛЕНИЕ ВЫХОДНОГО СИГНАЛА 4-ТОЧЕЧНОГО
ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО
Слайд 10РЕАКЦИЯ ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО НА ВОЗДЕЙСТВИЕ В ВИДЕ СМЕСИ ШУМА И СТУПЕНЧАТОГО
РЕАКЦИЯ ФИЛЬТРА СКОЛЬЗЯЩЕГО СРЕДНЕГО НА ВОЗДЕЙСТВИЕ В ВИДЕ СМЕСИ ШУМА И СТУПЕНЧАТОГО
Слайд 11Структура КИХ-фильтра
Структура КИХ-фильтра
Слайд 12Входные и выходные решетчатые функции
Входные и выходные решетчатые функции
Слайд 13ХАРАКТЕРИСТИКИ КИХ-ФИЛЬТРОВ
Выходное управляющее воздействие (результат работы фильтра) представляет собой сумму произведений величин,
ХАРАКТЕРИСТИКИ КИХ-ФИЛЬТРОВ
Выходное управляющее воздействие (результат работы фильтра) представляет собой сумму произведений величин,
Слайд 14Структура БИХ-фильтра
Структура БИХ-фильтра
Слайд 15ПИ-регуляторы
ПИ-регуляторы
 Презентация на тему Что общего у разных растений (1 класс)
Презентация на тему Что общего у разных растений (1 класс) Растения - кондиционеры
Растения - кондиционеры Правописание корней. Чередование гласных в корнях слов
Правописание корней. Чередование гласных в корнях слов Алгоритмы в нашей жизни 10 класс
Алгоритмы в нашей жизни 10 класс Родительская нежность
Родительская нежность Концептуальная разработка дизайн-проекта Семейный Медицинский Центр
Концептуальная разработка дизайн-проекта Семейный Медицинский Центр Инстаграм 1.0. Составление уникального торгового предложения
Инстаграм 1.0. Составление уникального торгового предложения Наука: создание научной картины мира
Наука: создание научной картины мира Участие гражданина в политической жизни
Участие гражданина в политической жизни Letter Blends!-a
Letter Blends!-a Государственное автономное профессиональное учреждение Мурманской области «Кольский медицинский
Государственное автономное профессиональное учреждение Мурманской области «Кольский медицинский Современная политическая элита КР
Современная политическая элита КР Структура компании Энергохолдинг
Структура компании Энергохолдинг Оценка технического состояния фасада здания
Оценка технического состояния фасада здания Что такое мир
Что такое мир ГОУ СПО Колледж туризма и гостиничного сервисаСанкт Петербурга ТЕМАОГАНИЗАЦИЯ И ПРОВЕДЕНИЕ СПЕЦИАЛЬНОЙ ОБРАБОТКИЗАНЯТИЕ НАЧ
ГОУ СПО Колледж туризма и гостиничного сервисаСанкт Петербурга ТЕМАОГАНИЗАЦИЯ И ПРОВЕДЕНИЕ СПЕЦИАЛЬНОЙ ОБРАБОТКИЗАНЯТИЕ НАЧ ФОТОКВЕСТ КОЗАЦЬКИЙ
ФОТОКВЕСТ КОЗАЦЬКИЙ Законодательное обеспечение охраны труда
Законодательное обеспечение охраны труда Тест Подготовили студентки 2-го курса ФТД группы Т-116: Чорап Анна И Чупра Екатерина
Тест Подготовили студентки 2-го курса ФТД группы Т-116: Чорап Анна И Чупра Екатерина  Реклама и маркетинг
Реклама и маркетинг Метод координат
Метод координат КРАСИВАЯ ПРОСТАЯ ЖИЗНЬ ТРЕБУЕТ ПОСТОЯНСТВА
КРАСИВАЯ ПРОСТАЯ ЖИЗНЬ ТРЕБУЕТ ПОСТОЯНСТВА Презентация на тему Бессоюзные сложные предложения 10 класс
Презентация на тему Бессоюзные сложные предложения 10 класс  Авторские изделия из цветного стекла
Авторские изделия из цветного стекла  Рони Ритшель
Рони Ритшель Свет мой, зеркальце
Свет мой, зеркальце Лаковая миниатюра
Лаковая миниатюра