- ТЕМА 1-Введение в Идент. систем управления

Содержание
- 2. Процесс моделирования заключается в установлении зависимостей между входными и выходными параметрами системы. Наиболее удобным методом исследования
- 3. Тема 1. ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ СОДЕРЖАНИЕ ТЕМЫ 1: 1. Классификация методов идентификации, принятая в зависимости
- 4. ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ 1. КЛАССИФИКАЦИЯ МЕТОДОВ ИДЕНТИФИКАЦИИ, ПРИНЯТАЯ В ЗАВИСИМОСТИ ОТ ИЗУЧЕННОСТИ ОБЪЕКТА Объект −
- 5. 1.Задача синтеза системы управления стандартного типа. Для решения этой задачи необходимо предварительное исследование объекта в условиях,
- 6. При исследовании динамических объектов принято следующее определение: Идентификацией называется «определение параметров и структуры математической модели, обеспечивающих
- 7. Процедура идентификации распадается на три этапа: 1. Выбор структуры модели на основании имеющейся априорной информации об
- 8. Выбор структуры модели определяется: априорной информацией об исследуемом процессе; требованиями к точности моделирования; реализуемостью вычислений; ограниченной
- 9. Выбор вида математической модели − важнейшая задача при идентификации динамических объектов. Рассмотрим совокупность всех характеристик объекта.
- 10. Для получения математического описания динамического объекта возможны два принципиально различных подхода: теоретические методы получения математического описания;
- 11. 2. Классификация динамических объектов По наличию априорной информации все объекты могут быть разделены на следующие группы:
- 12. 3. Объекты, для которых конкретный вид уравнения и численные значения параметров неизвестны, но имеется некоторая априорная
- 13. где размерность …, может быть различной. Следовательно, для нахождения модели объекта требуется определить, какая из функций
- 14. 4. Объекты, относительно которых отсутствуют какие-либо априорные сведения (объекты типа «черный ящик»). Провести четкую границу между
- 15. 3. Методы идентификации объектов В зависимости от степени изученности объекта методы идентификации могут различаться по следующим
- 16. 3) по принятому критерию подобия объекта и модели; 4) по методам восстановления неизвестных параметров объекта: неитерационные
- 17. 4. Сравнительная характеристика методов идентификации Теоретические методы получения математического описания по сравнению с экспериментальными методами позволяют
- 18. Наиболее эффективным методом является сочетание теоретического и экспериментального подходов. Результаты эксперимента позволяют упростить математическое описание объекта,
- 19. 5. Типы идентифицируемых объектов При идентификации динамических объектов источниками информации являются входные и выходные сигналы объекта.
- 20. Специфика типов объектов: Замкнутые и разомкнутые объекты. Методы идентификации должны быть применимы как к разомкнутым, так
- 21. Так как выходные координаты объекта независимы друг от друга (при отсутствии внутренних перекрестных обратных связей), достаточно
- 22. Линейные и нелинейные объекты. Исследование промышленных объектов чаще выполняют в линейном приближении являющейся идеализацией, которая в
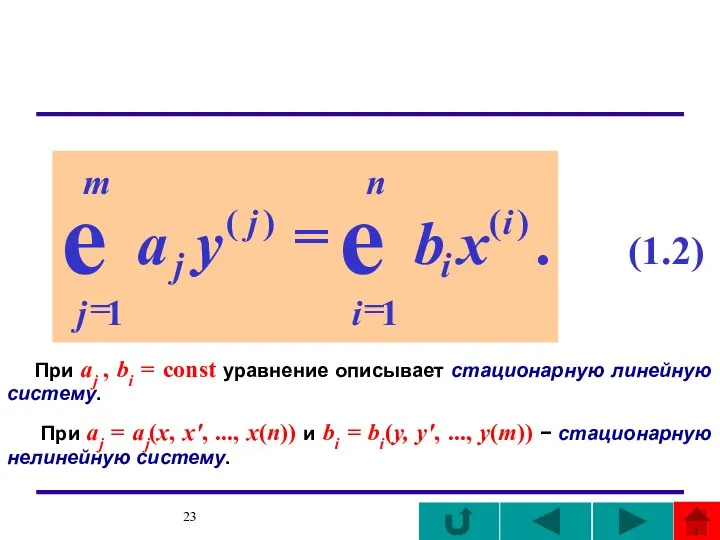
- 23. При aj , bi = const уравнение описывает стационарную линейную систему. При аj = аj(x, х',
- 24. Стационарные и нестационарные объекты. Для стационарных систем коэффициенты aj , bi = const . Для описания
- 25. Объекты с сосредоточенными и с распределенными параметрами. Подавляющее большинство технологических объектов представляют собой объекты с распределенными
- 26. 6. Типы сигналов, применяемых при идентификации объектов активными методами Все экспериментальные методы исследования динамики процесса основаны
- 27. Пробные воздействия могут быть: ступенчатыми; импульсными; периодическими; или случайными функциями времени. Пробные сигналы можно разделить на:
- 28. Ступенчатый входной сигнал Такой сигнал можно довольно просто сформировать в реальных условиях. Ступенчатому воздействию соответствуют, например:
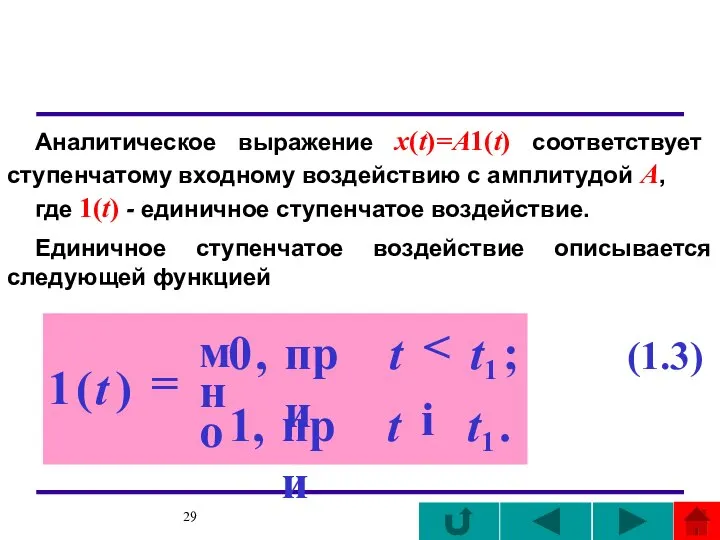
- 29. Аналитическое выражение x(t)=A1(t) соответствует ступенчатому входному воздействию с амплитудой A, где 1(t) - единичное ступенчатое воздействие.
- 30. Графики ступенчатых воздействий 1 − единичное ступенчатое x(t) = 1(t); 2 − ступенчатое воздействие x(t) =
- 31. При идентификации с помощью ступенчатого воздействия сигнал на входе объекта изменяется в момент времени t1 скачком
- 32. Графики реальных ступенчатых воздействий Графики 1 и 2 реальных единичных ступенчатых воздействий с различными характеристиками на
- 33. Ступенчатый сигнал может иметь значение амплитуды от 0 до 1 в относительных единицах или любое другое
- 34. Схема проведения исследований объекта при использовании ступенчатого входного сигнала
- 35. Импульсное пробное воздействие При идентификации часто используют входное воздействие типа «дельта-функции», т.е. импульса δ(t) бесконечной амплитуды
- 36. В реальных условиях такое воздействие нельзя получить!!! Поэтому оно заменяется приближенным сигналом, который имеет форму импульса
- 37. Графики импульсных воздействий
- 38. Основным требованием к пробным импульсным воздействиям является соотношение Аτ ≈ 1 при τ → 0 и
- 39. Использование периодических воздействий При исследовании объектов для получения их динамических характеристик используются периодические сигналы, в частности
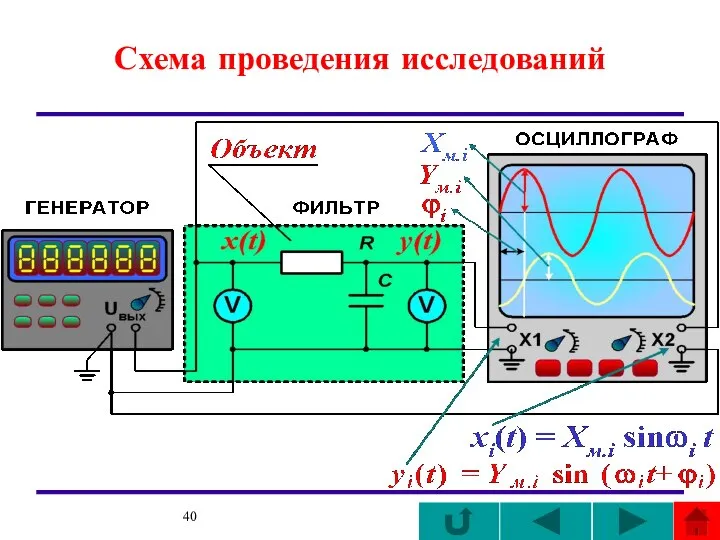
- 40. Схема проведения исследований
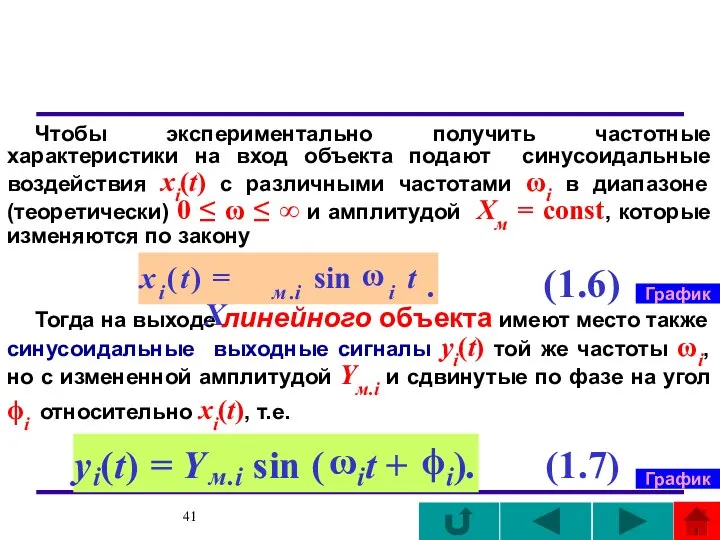
- 41. Чтобы экспериментально получить частотные характеристики на вход объекта подают синусоидальные воздействия xi(t) с различными частотами ωi
- 42. Графики реакции объекта на синусоидальный входной сигнал Показаны сигналы x1(t), y1(t) и x2(t), y2(t) при различных
- 43. Фазовый сдвиг входных сигналов x1(t) и x2(t) равен нулю, тогда как фазовый сдвиг выходных сигналов относительно
- 44. 7. Рекомендации по применению пробных воздействий Во многих случаях нарушение нормального функционирования объекта искусственными пробными воздействиями
- 45. Многочисленные исследования показывают, что при пассивном эксперименте возникает много трудностей, связанных с: нестационарностью рабочих случайных сигналов;
- 46. Выводы: 1. Технологические объекты нефтяной и газовой промышленности представляют собой сложные комплексы, поэтому для нормального функционирования
- 47. 3. Использование рассмотренных пробных входных сигналов при активной идентификации динамических объектов позволяет: сократить время проведения эксперимента;
- 49. Скачать презентацию
Слайд 2Процесс моделирования заключается в установлении зависимостей между входными и выходными параметрами системы.
Процесс моделирования заключается в установлении зависимостей между входными и выходными параметрами системы.
Слайд 3Тема 1. ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ
СОДЕРЖАНИЕ ТЕМЫ 1:
1. Классификация методов идентификации, принятая
Тема 1. ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ
СОДЕРЖАНИЕ ТЕМЫ 1:
1. Классификация методов идентификации, принятая
Слайд 4ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ
1. КЛАССИФИКАЦИЯ МЕТОДОВ
ИДЕНТИФИКАЦИИ, ПРИНЯТАЯ В
ЗАВИСИМОСТИ
ОБЩИЕ ВОПРОСЫ ТЕОРИИ ИДЕНТИФИКАЦИИ
1. КЛАССИФИКАЦИЯ МЕТОДОВ
ИДЕНТИФИКАЦИИ, ПРИНЯТАЯ В
ЗАВИСИМОСТИ
Слайд 51.Задача синтеза системы управления стандартного типа.
Для решения этой задачи необходимо предварительное
1.Задача синтеза системы управления стандартного типа.
Для решения этой задачи необходимо предварительное
Слайд 6При исследовании динамических объектов принято следующее определение:
Идентификацией называется «определение параметров и структуры
При исследовании динамических объектов принято следующее определение:
Идентификацией называется «определение параметров и структуры
Слайд 7Процедура идентификации распадается на три этапа:
1. Выбор структуры модели на основании имеющейся
Процедура идентификации распадается на три этапа:
1. Выбор структуры модели на основании имеющейся
Слайд 8Выбор структуры модели определяется:
априорной информацией об исследуемом процессе;
требованиями к точности моделирования;
реализуемостью вычислений;
ограниченной
Выбор структуры модели определяется:
априорной информацией об исследуемом процессе;
требованиями к точности моделирования;
реализуемостью вычислений;
ограниченной
Слайд 9Выбор вида математической модели − важнейшая задача при идентификации динамических объектов.
Рассмотрим совокупность
Выбор вида математической модели − важнейшая задача при идентификации динамических объектов.
Рассмотрим совокупность
Слайд 10Для получения математического описания динамического объекта возможны два принципиально различных подхода:
теоретические методы
Для получения математического описания динамического объекта возможны два принципиально различных подхода:
теоретические методы
Слайд 112. Классификация динамических объектов
По наличию априорной информации все объекты могут быть разделены
2. Классификация динамических объектов
По наличию априорной информации все объекты могут быть разделены
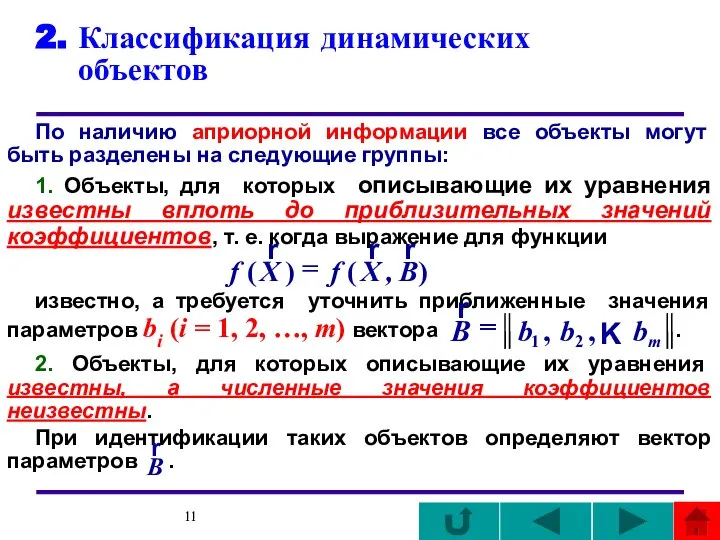
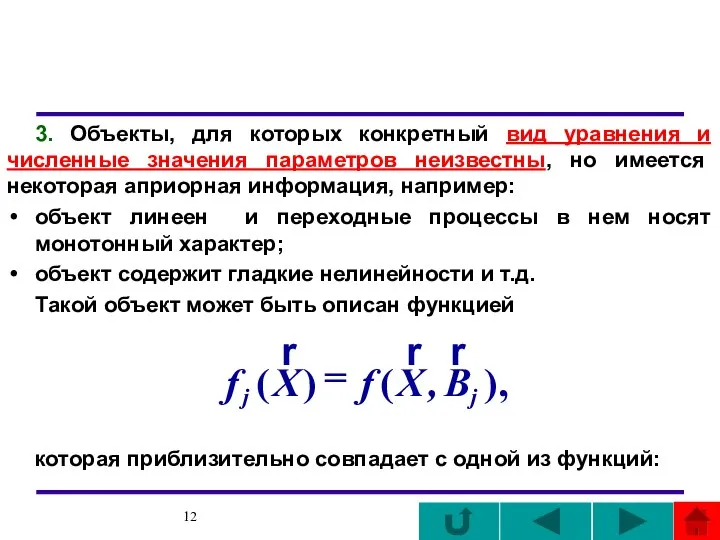
Слайд 123. Объекты, для которых конкретный вид уравнения и численные значения параметров неизвестны,
3. Объекты, для которых конкретный вид уравнения и численные значения параметров неизвестны,
Слайд 13
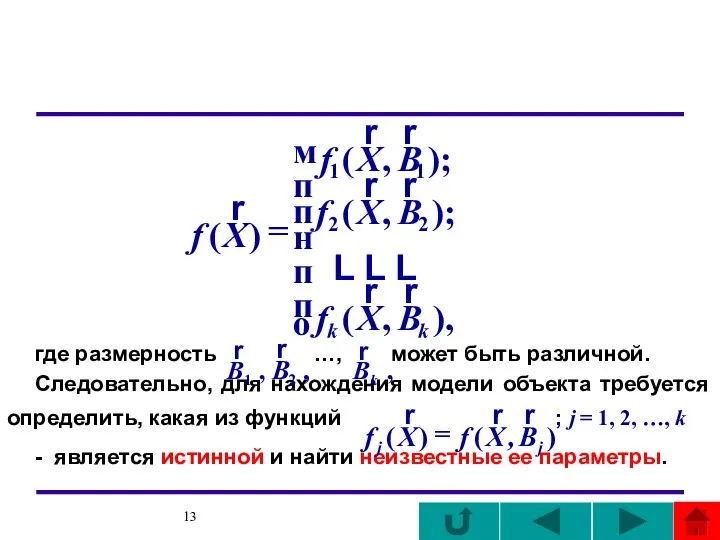
где размерность …, может быть различной.
Следовательно, для нахождения модели объекта требуется определить,
где размерность …, может быть различной.
Следовательно, для нахождения модели объекта требуется определить,
Слайд 144. Объекты, относительно которых отсутствуют какие-либо априорные сведения (объекты типа «черный ящик»).
Провести
4. Объекты, относительно которых отсутствуют какие-либо априорные сведения (объекты типа «черный ящик»).
Провести
Слайд 153. Методы идентификации объектов
В зависимости от степени изученности объекта методы идентификации могут
3. Методы идентификации объектов
В зависимости от степени изученности объекта методы идентификации могут
Слайд 163) по принятому критерию подобия объекта и модели;
4) по методам восстановления неизвестных
3) по принятому критерию подобия объекта и модели;
4) по методам восстановления неизвестных
Слайд 174. Сравнительная характеристика
методов идентификации
Теоретические методы получения математического описания по сравнению с
4. Сравнительная характеристика
методов идентификации
Теоретические методы получения математического описания по сравнению с
Слайд 18Наиболее эффективным методом является сочетание теоретического и экспериментального подходов.
Результаты эксперимента позволяют
Наиболее эффективным методом является сочетание теоретического и экспериментального подходов.
Результаты эксперимента позволяют
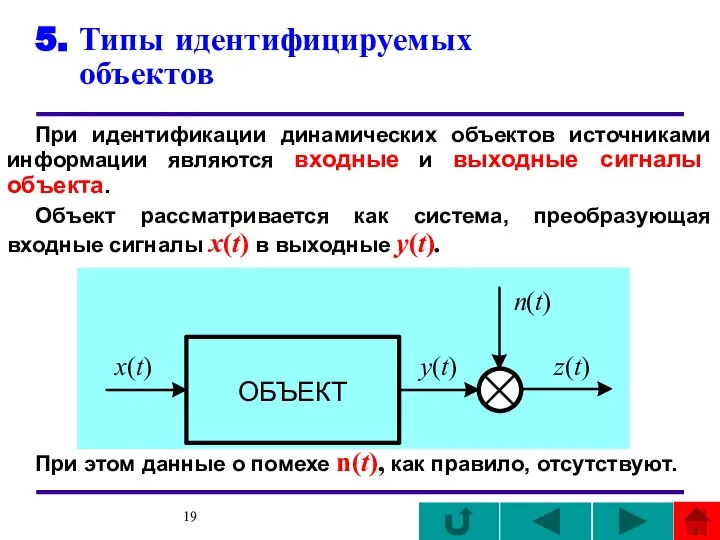
Слайд 195. Типы идентифицируемых объектов
При идентификации динамических объектов источниками информации являются входные
5. Типы идентифицируемых объектов
При идентификации динамических объектов источниками информации являются входные
Слайд 20Специфика типов объектов:
Замкнутые и разомкнутые объекты.
Методы идентификации должны быть применимы как к
Специфика типов объектов:
Замкнутые и разомкнутые объекты.
Методы идентификации должны быть применимы как к
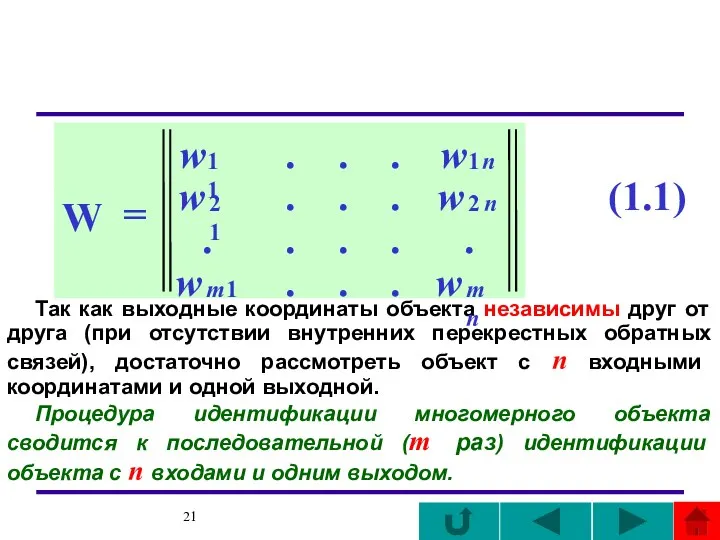
Слайд 21Так как выходные координаты объекта независимы друг от друга (при отсутствии внутренних
Так как выходные координаты объекта независимы друг от друга (при отсутствии внутренних
Слайд 22Линейные и нелинейные объекты.
Исследование промышленных объектов чаще выполняют в линейном приближении
Линейные и нелинейные объекты.
Исследование промышленных объектов чаще выполняют в линейном приближении
Слайд 23При aj , bi = const уравнение описывает стационарную линейную систему.
При
При aj , bi = const уравнение описывает стационарную линейную систему.
При
Слайд 24Стационарные и нестационарные объекты.
Для стационарных систем коэффициенты aj , bi =
Стационарные и нестационарные объекты.
Для стационарных систем коэффициенты aj , bi =
Слайд 25Объекты с сосредоточенными и с распределенными параметрами.
Подавляющее большинство технологических объектов представляют
Объекты с сосредоточенными и с распределенными параметрами.
Подавляющее большинство технологических объектов представляют
Слайд 266. Типы сигналов, применяемых при идентификации объектов активными методами
Все экспериментальные методы исследования
6. Типы сигналов, применяемых при идентификации объектов активными методами
Все экспериментальные методы исследования
Слайд 27Пробные воздействия могут быть:
ступенчатыми;
импульсными;
периодическими;
или случайными функциями времени.
Пробные сигналы можно разделить на:
стохастические;
детерминированные.
Последние
Пробные воздействия могут быть:
ступенчатыми;
импульсными;
периодическими;
или случайными функциями времени.
Пробные сигналы можно разделить на:
стохастические;
детерминированные.
Последние
Слайд 28Ступенчатый входной сигнал
Такой сигнал можно довольно просто сформировать в реальных условиях.
Ступенчатый входной сигнал
Такой сигнал можно довольно просто сформировать в реальных условиях.
Слайд 29Аналитическое выражение x(t)=A1(t) соответствует ступенчатому входному воздействию с амплитудой A,
где 1(t)
Аналитическое выражение x(t)=A1(t) соответствует ступенчатому входному воздействию с амплитудой A,
где 1(t)
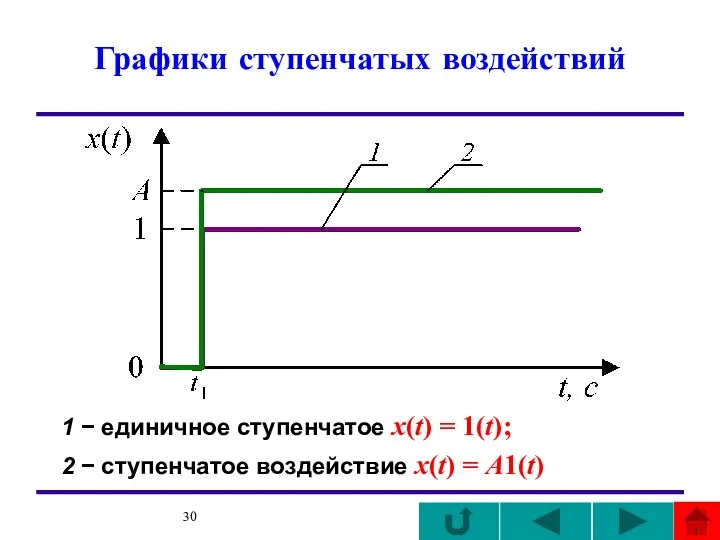
Слайд 30Графики ступенчатых воздействий
1 − единичное ступенчатое x(t) = 1(t);
2 − ступенчатое воздействие
Графики ступенчатых воздействий
1 − единичное ступенчатое x(t) = 1(t);
2 − ступенчатое воздействие
Слайд 31При идентификации с помощью ступенчатого воздействия сигнал на входе объекта изменяется в
При идентификации с помощью ступенчатого воздействия сигнал на входе объекта изменяется в
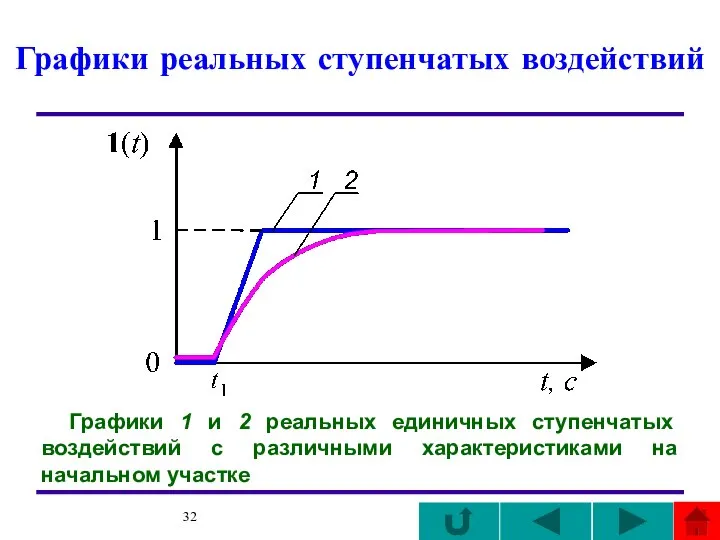
Слайд 32Графики реальных ступенчатых воздействий
Графики 1 и 2 реальных единичных ступенчатых воздействий с
Графики реальных ступенчатых воздействий
Графики 1 и 2 реальных единичных ступенчатых воздействий с
Слайд 33Ступенчатый сигнал может иметь значение амплитуды от 0 до 1 в относительных
Ступенчатый сигнал может иметь значение амплитуды от 0 до 1 в относительных
Слайд 34Схема проведения исследований объекта при использовании ступенчатого входного сигнала
Схема проведения исследований объекта при использовании ступенчатого входного сигнала

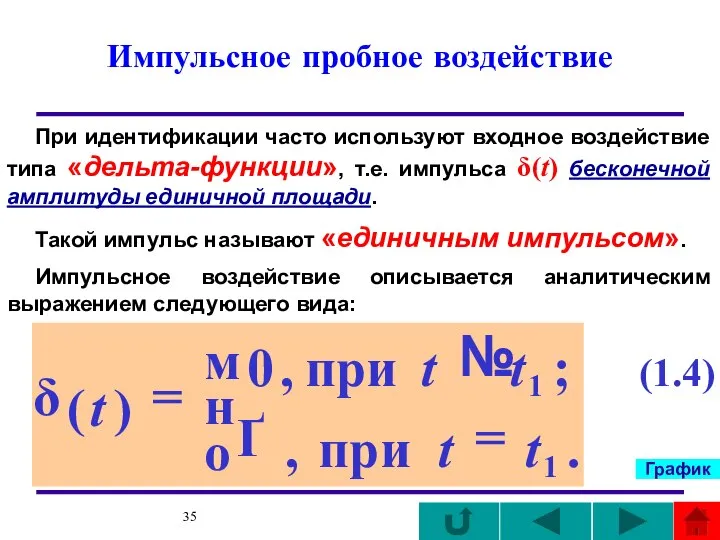
Слайд 35Импульсное пробное воздействие
При идентификации часто используют входное воздействие типа «дельта-функции», т.е.
Импульсное пробное воздействие
При идентификации часто используют входное воздействие типа «дельта-функции», т.е.
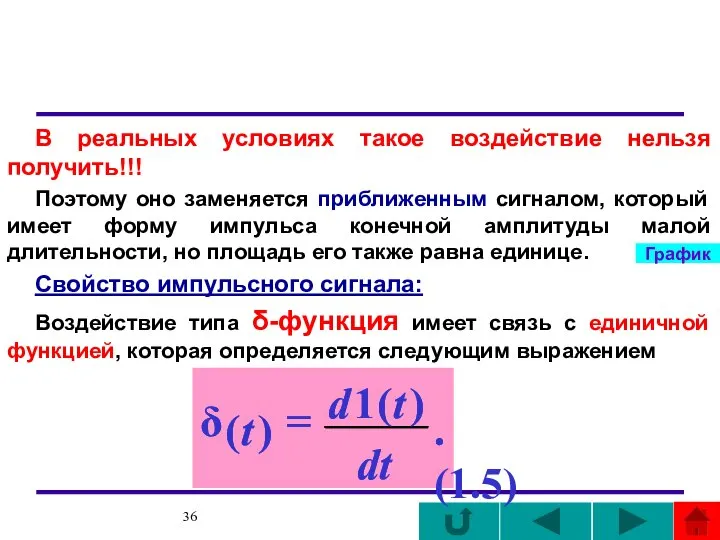
Слайд 36В реальных условиях такое воздействие нельзя получить!!!
Поэтому оно заменяется приближенным сигналом, который
В реальных условиях такое воздействие нельзя получить!!!
Поэтому оно заменяется приближенным сигналом, который
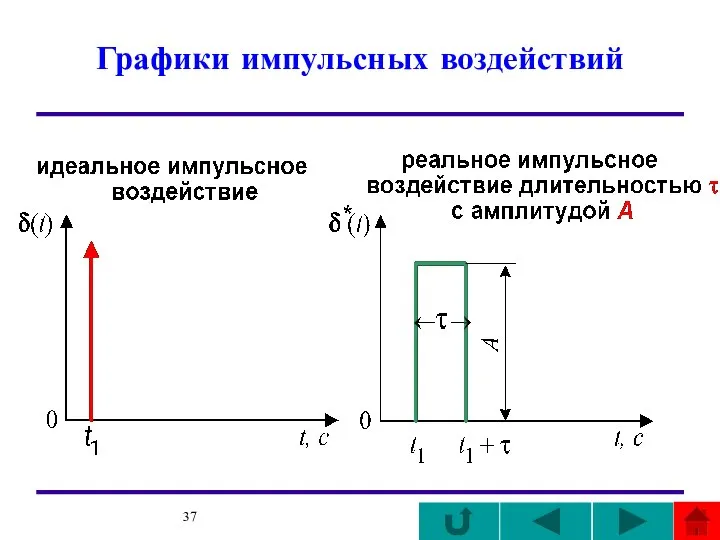
Слайд 37Графики импульсных воздействий
Графики импульсных воздействий
Слайд 38Основным требованием к пробным импульсным воздействиям является соотношение
Аτ ≈ 1 при
Основным требованием к пробным импульсным воздействиям является соотношение
Аτ ≈ 1 при
Слайд 39Использование периодических воздействий
При исследовании объектов для получения их динамических характеристик используются
Использование периодических воздействий
При исследовании объектов для получения их динамических характеристик используются
Слайд 40Схема проведения исследований
Схема проведения исследований
Слайд 41Чтобы экспериментально получить частотные характеристики на вход объекта подают синусоидальные воздействия xi(t)
Чтобы экспериментально получить частотные характеристики на вход объекта подают синусоидальные воздействия xi(t)
Слайд 42Графики реакции объекта на синусоидальный входной сигнал
Показаны сигналы x1(t), y1(t) и
Графики реакции объекта на синусоидальный входной сигнал
Показаны сигналы x1(t), y1(t) и
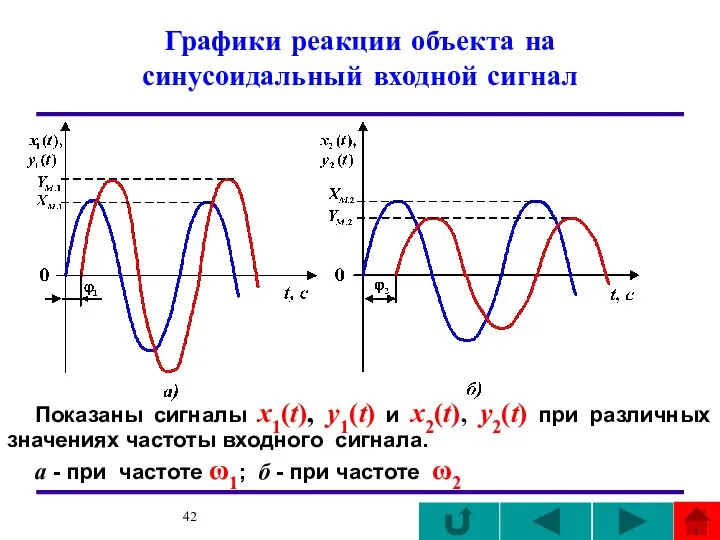
Слайд 43Фазовый сдвиг входных сигналов x1(t) и x2(t) равен нулю, тогда как фазовый
Фазовый сдвиг входных сигналов x1(t) и x2(t) равен нулю, тогда как фазовый
Слайд 447. Рекомендации по применению пробных воздействий
Во многих случаях нарушение нормального функционирования объекта
7. Рекомендации по применению пробных воздействий
Во многих случаях нарушение нормального функционирования объекта
Слайд 45Многочисленные исследования показывают, что при пассивном эксперименте возникает много трудностей, связанных с:
нестационарностью
Многочисленные исследования показывают, что при пассивном эксперименте возникает много трудностей, связанных с:
нестационарностью
Слайд 46Выводы:
1. Технологические объекты нефтяной и газовой промышленности представляют собой сложные комплексы, поэтому
Выводы:
1. Технологические объекты нефтяной и газовой промышленности представляют собой сложные комплексы, поэтому
Слайд 473. Использование рассмотренных пробных входных сигналов при активной идентификации динамических объектов позволяет:
сократить
3. Использование рассмотренных пробных входных сигналов при активной идентификации динамических объектов позволяет:
сократить
 Исследование цветозвукового фона стихотворений в среде Microsoft Excel
Исследование цветозвукового фона стихотворений в среде Microsoft Excel Пришвин М.М.
Пришвин М.М. Сутність маркетинговой деятельности
Сутність маркетинговой деятельности  Виды спорта Великобритании. Конные бега
Виды спорта Великобритании. Конные бега ВЫБОР ПРОФЕССИИ – ЭТО СЕРЬЁЗНО
ВЫБОР ПРОФЕССИИ – ЭТО СЕРЬЁЗНО ДЗ (2)
ДЗ (2)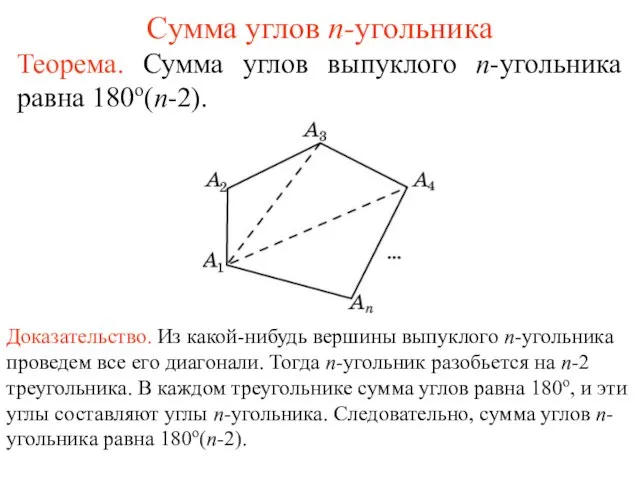 Сумма углов n-угольника
Сумма углов n-угольника Better Cotton (ВС/ТВС). Хлопок из устойчивых источников
Better Cotton (ВС/ТВС). Хлопок из устойчивых источников О моделировании инновационной обучающей среды университета
О моделировании инновационной обучающей среды университета Фармакоэпидемиология
Фармакоэпидемиология Свойства логарифмов
Свойства логарифмов  Характеристика направления «Экономика» (магистратура)
Характеристика направления «Экономика» (магистратура) Анатолий Аксаков Заместитель председателя Комитета Госдумы по кредитным организациям и финансовым рынкам Член Национального ба
Анатолий Аксаков Заместитель председателя Комитета Госдумы по кредитным организациям и финансовым рынкам Член Национального ба ВСЕРОССИЙСКИЙ КОНКУРС ПЕДАГОГИЧЕСКОГО МАСТЕРСТВА "ФОРМУЛА БУДУЩЕГО-2011": ИТОГИ, УРОКИ, ПЕРСПЕКТИВЫ
ВСЕРОССИЙСКИЙ КОНКУРС ПЕДАГОГИЧЕСКОГО МАСТЕРСТВА "ФОРМУЛА БУДУЩЕГО-2011": ИТОГИ, УРОКИ, ПЕРСПЕКТИВЫ Классики о книгах
Классики о книгах Теоремы синусов и косинусов
Теоремы синусов и косинусов 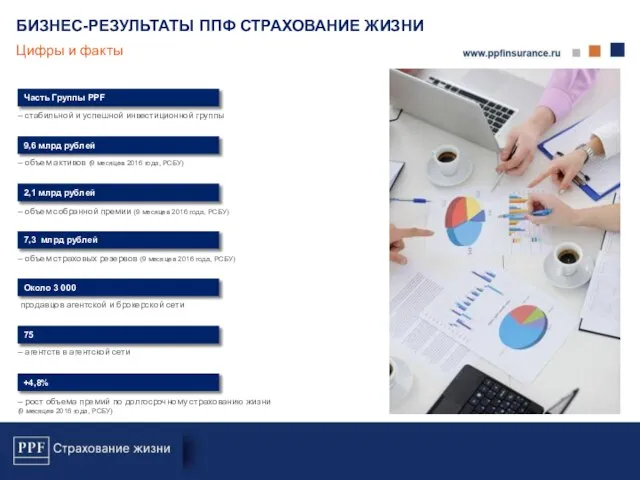 Бизнес-результаты ППФ страхование жизни
Бизнес-результаты ППФ страхование жизни Презентация на тему ЖУК-НОСОРОГ
Презентация на тему ЖУК-НОСОРОГ Задача на подбор сечения
Задача на подбор сечения Сетевые продажи
Сетевые продажи Подпрограмма «Развитие Москвы как Международного финансового центра»
Подпрограмма «Развитие Москвы как Международного финансового центра» О мерах по повышению эффективности международных контейнерных перевозок с использованием Транссибирской магистрали
О мерах по повышению эффективности международных контейнерных перевозок с использованием Транссибирской магистрали Черепаха на острове
Черепаха на острове Посёлок Котельное
Посёлок Котельное Сжатие текста Урок русского языка, 9 класс, подготовка к ГИА 9
Сжатие текста Урок русского языка, 9 класс, подготовка к ГИА 9 Роль отца в воспитании ребенка
Роль отца в воспитании ребенка Управление качеством
Управление качеством синтаксис (1)
синтаксис (1)