- Теория автоматов

Содержание
- 2. Минимизация КА Из примера 3.2 видно, что разные автоматы могут функционировать одинаково, даже если у них
- 3. Минимизация КА Определение 3.7. Два состояния р и q конечного автомата А - называются эквивалентными (обозначается
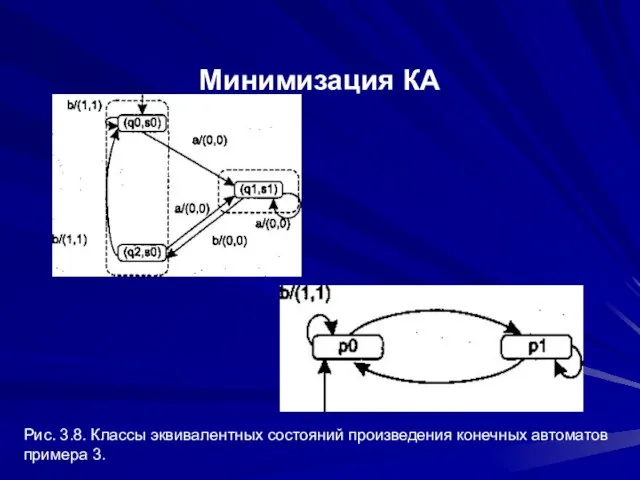
- 4. Минимизация КА Рис. 3.8. Классы эквивалентных состояний произведения конечных автоматов примера 3.
- 5. Минимизация КА Определение 3.7 не является конструктивным: оно не дает нам процедуры выяснения того, являются ли
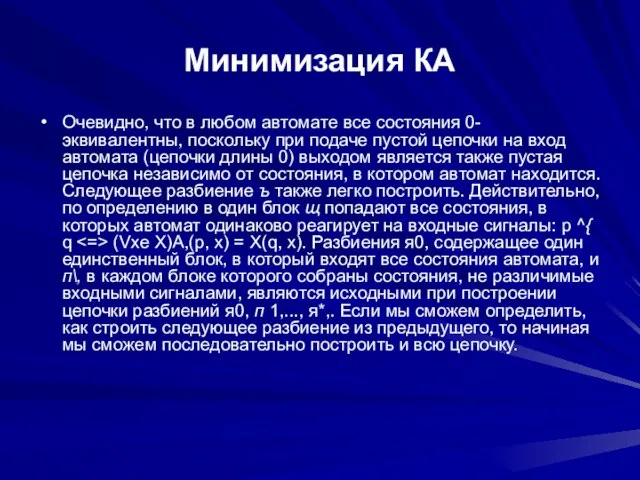
- 6. Минимизация КА Очевидно, что в любом автомате все состояния 0-эквивалентны, поскольку при подаче пустой цепочки на
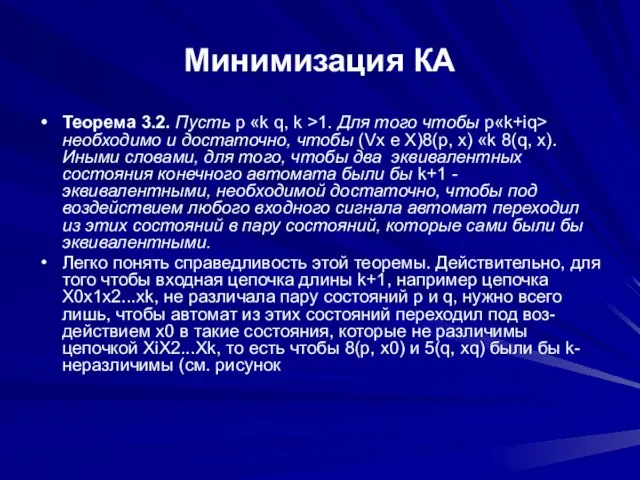
- 7. Минимизация КА Теорема 3.2. Пусть р «k q, k >1. Для того чтобы p«k+iq> необходимо и
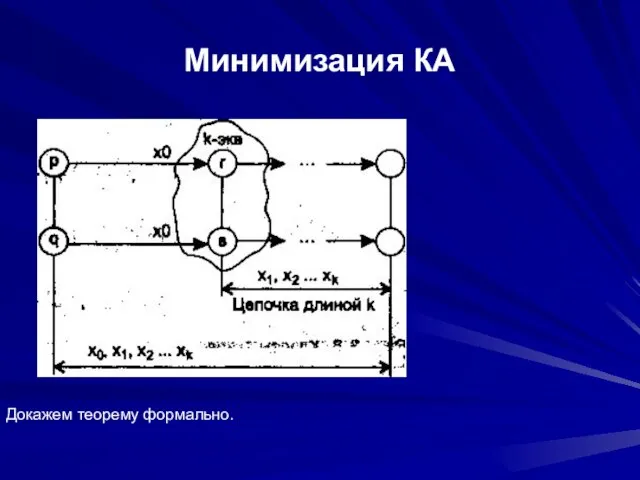
- 8. Минимизация КА Докажем теорему формально.
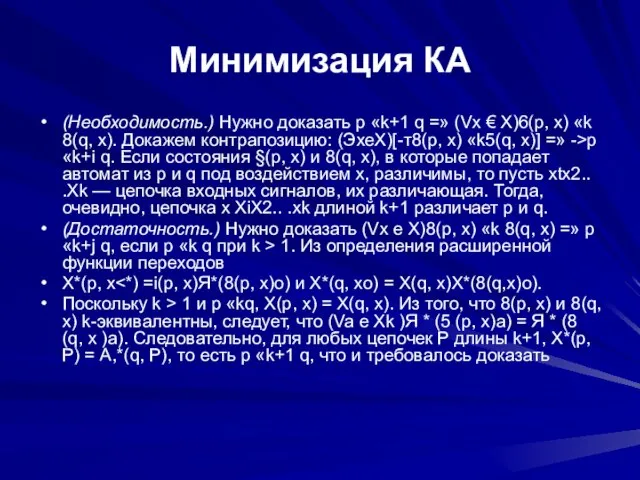
- 9. Минимизация КА (Необходимость.) Нужно доказать р «k+1 q =» (Vx € X)6(p, x) «k 8(q, x).
- 10. Минимизация КА Очевидно, что если р и qk+1-эквивалентны, то они k-эквивалентны. Иными сло-вами,,блоки разбиения яk+1 являются
- 11. Минимизация КА Пусть теперь р «r+i q - р «r q. Тогда (Vp, q € S)p
- 12. Минимизация КА Разбиение ki в один блок объединяет те состояния, которые нельзя различить при подаче цепочек
- 13. Минимизация КА Как было установлено выше, эти состояния должны быть из одного блока предыдущего разбиения. Обратимся
- 14. Минимизация КА Аналогично строится Яз. При его построении не нужно проверять, в какой блок Я2 будет
- 15. Автоматы Мили и Мура Рассмотренная выше модель называется автоматом Мили. Автоматы Мура образуют другой класс моделей,
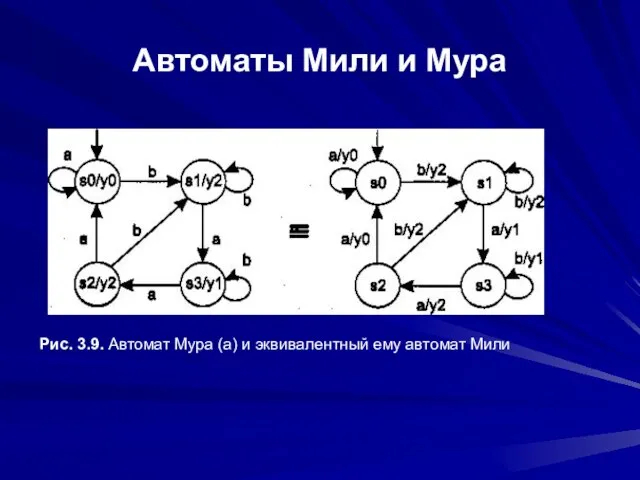
- 16. Автоматы Мили и Мура Рис. 3.9. Автомат Мура (а) и эквивалентный ему автомат Мили
- 17. Автоматы Мили и Мура Не столь очевидно, что справедливо и обратное: для любого автомата Мили существует
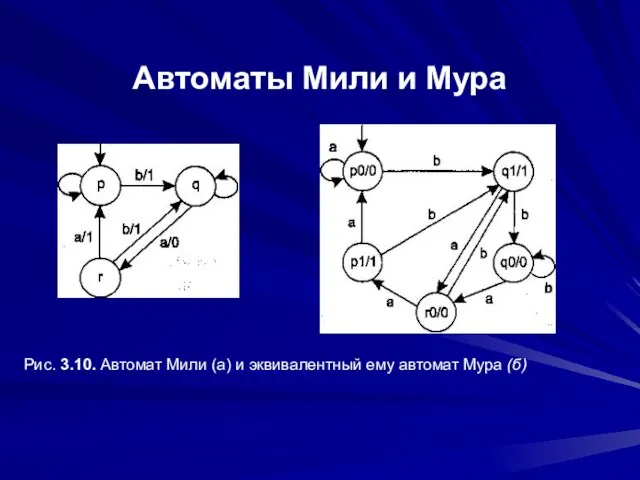
- 18. Автоматы Мили и Мура Рис. 3.10. Автомат Мили (а) и эквивалентный ему автомат Мура (б)
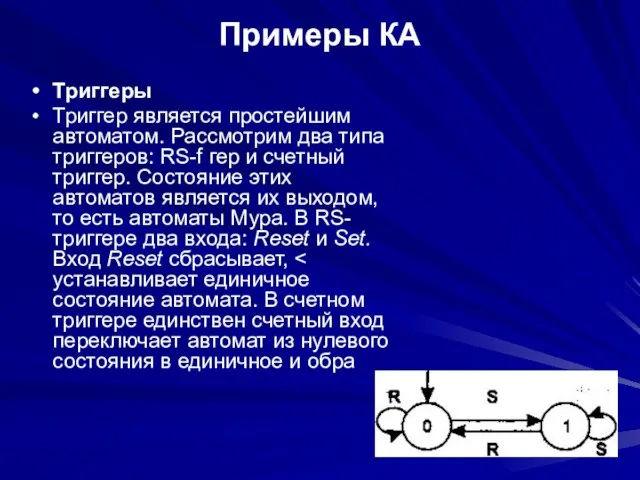
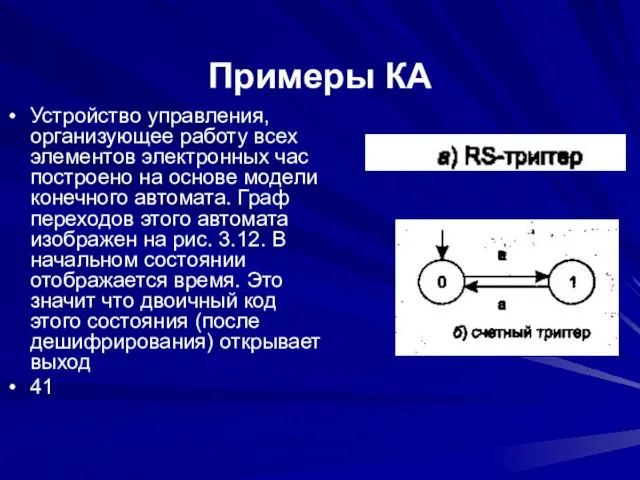
- 19. Примеры КА Триггеры Триггер является простейшим автоматом. Рассмотрим два типа триггеров: RS-f гер и счетный триггер.
- 20. Примеры КА Электронные часы Электронные часы самых разнообразных функциональных возможностей остаются одним из наиболее широко применяемых
- 21. Примеры КА Структурная схема электронных часов казана на рис. 3.11. Управляющие кнопки обозначены здесь «а» и
- 22. Примеры КА Устройство управления, организующее работу всех элементов электронных час построено на основе модели конечного автомата.
- 23. Примеры КА Примеры КА четырех двоично-десятичных регистров, хранящих единицы и десятки шшут и единицы и десятки
- 24. Примеры КА Рис. 3.12. Автомат устройства управления электронными часами Конечный автомат реагирует на событие нажатия кнопки
- 26. Скачать презентацию
Слайд 2Минимизация КА
Из примера 3.2 видно, что разные автоматы могут функционировать одинаково, даже
Минимизация КА
Из примера 3.2 видно, что разные автоматы могут функционировать одинаково, даже
Слайд 3Минимизация КА
Определение 3.7. Два состояния р и q конечного автомата А -
Минимизация КА
Определение 3.7. Два состояния р и q конечного автомата А -
Слайд 4Минимизация КА
Рис. 3.8. Классы эквивалентных состояний произведения конечных автоматов примера 3.
Минимизация КА
Рис. 3.8. Классы эквивалентных состояний произведения конечных автоматов примера 3.
Слайд 5Минимизация КА
Определение 3.7 не является конструктивным: оно не дает нам процедуры выяснения
Минимизация КА
Определение 3.7 не является конструктивным: оно не дает нам процедуры выяснения
Слайд 6Минимизация КА
Очевидно, что в любом автомате все состояния 0-эквивалентны, поскольку при подаче
Минимизация КА
Очевидно, что в любом автомате все состояния 0-эквивалентны, поскольку при подаче
Слайд 7Минимизация КА
Теорема 3.2. Пусть р «k q, k >1. Для того чтобы
Минимизация КА
Теорема 3.2. Пусть р «k q, k >1. Для того чтобы
Слайд 8Минимизация КА
Докажем теорему формально.
Минимизация КА
Докажем теорему формально.
Слайд 9Минимизация КА
(Необходимость.) Нужно доказать р «k+1 q =» (Vx € X)6(p, x)
Минимизация КА
(Необходимость.) Нужно доказать р «k+1 q =» (Vx € X)6(p, x)
Слайд 10Минимизация КА
Очевидно, что если р и qk+1-эквивалентны, то они k-эквивалентны. Иными сло-вами,,блоки
Минимизация КА
Очевидно, что если р и qk+1-эквивалентны, то они k-эквивалентны. Иными сло-вами,,блоки
Слайд 11Минимизация КА
Пусть теперь р «r+i q - р «r q. Тогда (Vp,
Минимизация КА
Пусть теперь р «r+i q - р «r q. Тогда (Vp,
Слайд 12Минимизация КА
Разбиение ki в один блок объединяет те состояния, которые нельзя различить
Минимизация КА
Разбиение ki в один блок объединяет те состояния, которые нельзя различить
Слайд 13Минимизация КА
Как было установлено выше, эти состояния должны быть из одного блока
Минимизация КА
Как было установлено выше, эти состояния должны быть из одного блока
Слайд 14Минимизация КА
Аналогично строится Яз. При его построении не нужно проверять, в какой
Минимизация КА
Аналогично строится Яз. При его построении не нужно проверять, в какой
Слайд 15Автоматы Мили и Мура
Рассмотренная выше модель называется автоматом Мили. Автоматы Мура образуют
Автоматы Мили и Мура
Рассмотренная выше модель называется автоматом Мили. Автоматы Мура образуют
Слайд 16Автоматы Мили и Мура
Рис. 3.9. Автомат Мура (а) и эквивалентный ему автомат
Автоматы Мили и Мура
Рис. 3.9. Автомат Мура (а) и эквивалентный ему автомат
Слайд 17Автоматы Мили и Мура
Не столь очевидно, что справедливо и обратное: для любого
Автоматы Мили и Мура
Не столь очевидно, что справедливо и обратное: для любого
Слайд 18Автоматы Мили и Мура
Рис. 3.10. Автомат Мили (а) и эквивалентный ему автомат
Автоматы Мили и Мура
Рис. 3.10. Автомат Мили (а) и эквивалентный ему автомат
Слайд 19Примеры КА
Триггеры
Триггер является простейшим автоматом. Рассмотрим два типа триггеров: RS-f
Примеры КА
Триггеры
Триггер является простейшим автоматом. Рассмотрим два типа триггеров: RS-f
Слайд 20Примеры КА
Электронные часы
Электронные часы самых разнообразных функциональных возможностей остаются одним из
Примеры КА
Электронные часы
Электронные часы самых разнообразных функциональных возможностей остаются одним из
Слайд 21Примеры КА
Структурная схема электронных часов казана на рис. 3.11. Управляющие кнопки
Примеры КА
Структурная схема электронных часов казана на рис. 3.11. Управляющие кнопки
Слайд 22Примеры КА
Устройство управления, организующее работу всех элементов электронных час построено на основе
Примеры КА
Устройство управления, организующее работу всех элементов электронных час построено на основе
Слайд 23Примеры КА
Примеры КА
четырех двоично-десятичных регистров, хранящих единицы и десятки шшут и единицы
Примеры КА
Примеры КА
четырех двоично-десятичных регистров, хранящих единицы и десятки шшут и единицы

Слайд 24Примеры КА
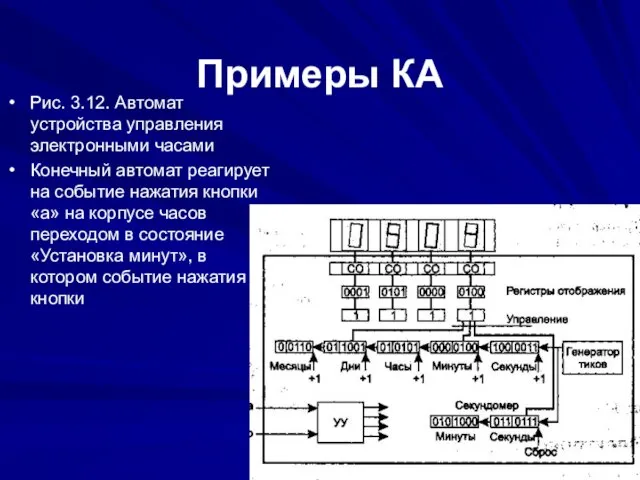
Рис. 3.12. Автомат устройства управления электронными часами
Конечный автомат реагирует на
Примеры КА
Рис. 3.12. Автомат устройства управления электронными часами
Конечный автомат реагирует на
 Лот 12, г. Хабаровск, ул. Сысоева, 21, кв. 18
Лот 12, г. Хабаровск, ул. Сысоева, 21, кв. 18 Космический маятник
Космический маятник Исключение участника из корпорации по праву Англии
Исключение участника из корпорации по праву Англии Файловая система
Файловая система Образ Катерины
Образ Катерины Оценка рисков и угроз экономической безопасности в деятельности организации
Оценка рисков и угроз экономической безопасности в деятельности организации Презентация на тему Обеспечение пожарной безопасности на предприятии
Презентация на тему Обеспечение пожарной безопасности на предприятии Эпиграфические памятники иудеев Крыма: как перестать беспокоиться и начать читать
Эпиграфические памятники иудеев Крыма: как перестать беспокоиться и начать читать Презентация на тему Арабский мир
Презентация на тему Арабский мир  Определение антропогенных нарушений почвы
Определение антропогенных нарушений почвы Презентация на тему Агрессия в школе
Презентация на тему Агрессия в школе  САНАТОРНО-КУРОРТНОЕ ЛЕЧЕНИЕ
САНАТОРНО-КУРОРТНОЕ ЛЕЧЕНИЕ  ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя
ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя Итоговый тест по математике для 1 класса
Итоговый тест по математике для 1 класса Невідомий фотограф XX століття. Вівієн Майер
Невідомий фотограф XX століття. Вівієн Майер Элективный курс по алгебре по теме:
Элективный курс по алгебре по теме: Культура Западной и Центральной Европы
Культура Западной и Центральной Европы О ходе создания особых экономических зон Российской Федерации
О ходе создания особых экономических зон Российской Федерации Оценка качества образовательной деятельности
Оценка качества образовательной деятельности Презентация на тему Как подготовить и защитить учебный проект
Презентация на тему Как подготовить и защитить учебный проект Откуда берутся снег и лёд
Откуда берутся снег и лёд Политическое поведение
Политическое поведение Добро пожаловать на урок алгебры и начала анализа в 1О классе
Добро пожаловать на урок алгебры и начала анализа в 1О классе Биофизика внешнего дыхания и его протезирования
Биофизика внешнего дыхания и его протезирования Основы графики
Основы графики Каркас унифицированный безригельный КУБ 2,5
Каркас унифицированный безригельный КУБ 2,5 Как Верховный суд изменил подход к увольнениям сотрудников по инициативе работодателя
Как Верховный суд изменил подход к увольнениям сотрудников по инициативе работодателя Проект “Телемост” Россия и США
Проект “Телемост” Россия и США