- Типовая функциональная схема САУ

Содержание
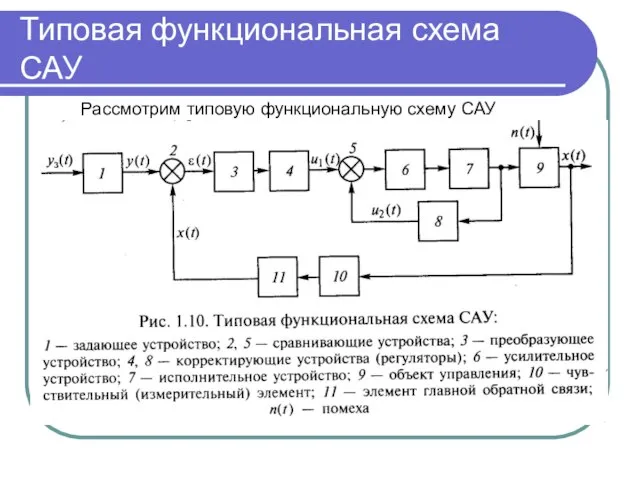
- 2. Типовая функциональная схема САУ Рассмотрим типовую функциональную схему САУ
- 3. Назначение элементов Задающее устройство 1 преобразует воздействие уз(t) в сигнал y(t), а сравнивающее устройство 2 в
- 4. Назначение элементов Регуляторы 4, 8 служат для обеспечения заданных динамических свойств замкнутой системы. С их помощью
- 5. Назначение элементов В хорошо спроектированной системе ошибка ε(t) очень мала, в то время как на управляемый
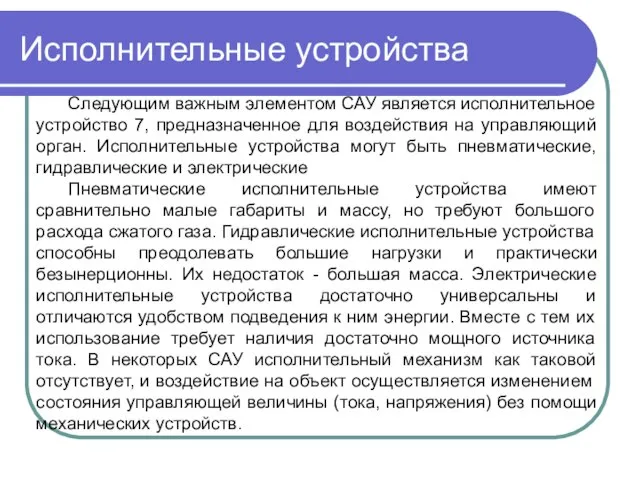
- 6. Исполнительные устройства Следующим важным элементом САУ является исполнительное устройство 7, предназначенное для воздействия на управляющий орган.
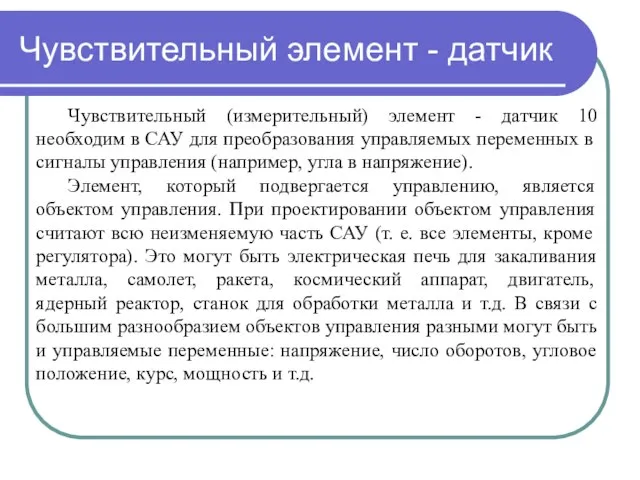
- 7. Чувствительный элемент - датчик Чувствительный (измерительный) элемент - датчик 10 необходим в САУ для преобразования управляемых
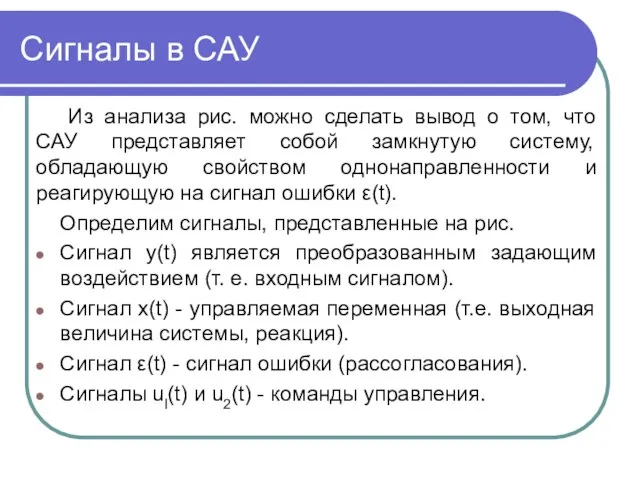
- 8. Сигналы в САУ Из анализа рис. можно сделать вывод о том, что САУ представляет собой замкнутую
- 10. Скачать презентацию
Слайд 3Назначение элементов
Задающее устройство 1 преобразует воздействие уз(t) в сигнал y(t), а сравнивающее
Назначение элементов
Задающее устройство 1 преобразует воздействие уз(t) в сигнал y(t), а сравнивающее
Слайд 4Назначение элементов
Регуляторы 4, 8 служат для обеспечения заданных динамических свойств замкнутой системы.
Назначение элементов
Регуляторы 4, 8 служат для обеспечения заданных динамических свойств замкнутой системы.
Слайд 5Назначение элементов
В хорошо спроектированной системе ошибка ε(t) очень мала, в то время
Назначение элементов
В хорошо спроектированной системе ошибка ε(t) очень мала, в то время
Слайд 6Исполнительные устройства
Следующим важным элементом САУ является исполнительное устройство 7, предназначенное для воздействия
Исполнительные устройства
Следующим важным элементом САУ является исполнительное устройство 7, предназначенное для воздействия
Слайд 7Чувствительный элемент - датчик
Чувствительный (измерительный) элемент - датчик 10 необходим в САУ
Чувствительный элемент - датчик
Чувствительный (измерительный) элемент - датчик 10 необходим в САУ
Слайд 8Сигналы в САУ
Из анализа рис. можно сделать вывод о том, что САУ
Сигналы в САУ
Из анализа рис. можно сделать вывод о том, что САУ
 Туристическая фирма САМ СТРАНА:АНДОРРА СТРАНА:АНДОРРА КУРОРТЫ:Андорра-ла-Велья/Эскальдес, Энкамп, Сольдеу-эль-Тартер, Канильо, Пас-
Туристическая фирма САМ СТРАНА:АНДОРРА СТРАНА:АНДОРРА КУРОРТЫ:Андорра-ла-Велья/Эскальдес, Энкамп, Сольдеу-эль-Тартер, Канильо, Пас- Ораторское мастерство
Ораторское мастерство Презентация на тему ОСНОВНЫЕ ПОНЯТИЯ ХИМИИ 8 класс
Презентация на тему ОСНОВНЫЕ ПОНЯТИЯ ХИМИИ 8 класс  Гендерные аспекты семейной политики Жанна Чернова НИУ-ВШЭ
Гендерные аспекты семейной политики Жанна Чернова НИУ-ВШЭ Состав слова (урок-обобщение)
Состав слова (урок-обобщение) Духовно-нравственное воспитание подрастающего поколения как государственная парадигма
Духовно-нравственное воспитание подрастающего поколения как государственная парадигма Настольный компьютер vs планшет. Кому принадлежит рынок
Настольный компьютер vs планшет. Кому принадлежит рынок Мода эпохи Возрождения
Мода эпохи Возрождения ОРДЕНА И МЕДАЛИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ
ОРДЕНА И МЕДАЛИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ Дом, где я - хозяйка
Дом, где я - хозяйка Доступное жилье повышенной комфортности. Дома и квартиры в Краснодаре
Доступное жилье повышенной комфортности. Дома и квартиры в Краснодаре Объекты культурного наследия
Объекты культурного наследия Инновационные приемы в организации исследовательской деятельности обучающихся
Инновационные приемы в организации исследовательской деятельности обучающихся Литературоведческая разминка
Литературоведческая разминка Капля никотина убивает лошадь!!!
Капля никотина убивает лошадь!!! От реформы судебной системы к реформе судебной власти
От реформы судебной системы к реформе судебной власти Клод Моне – основатель импрессионизма
Клод Моне – основатель импрессионизма Важнейшие архитектурные элементы здания
Важнейшие архитектурные элементы здания Миссия и цели службы питания в гостинице
Миссия и цели службы питания в гостинице Русский язык в плакатах, таблицах и схемах 7 класс 1 Причастие 2 Признаки прилагательного и глагола у причастия 3 Склонение прича
Русский язык в плакатах, таблицах и схемах 7 класс 1 Причастие 2 Признаки прилагательного и глагола у причастия 3 Склонение прича ФГОС как система требований к организации и осуществление образовательной деятельности
ФГОС как система требований к организации и осуществление образовательной деятельности Тест «Повязки»
Тест «Повязки» Изучение и отработка моделей поведения в условиях вынужденной и природной аномалии
Изучение и отработка моделей поведения в условиях вынужденной и природной аномалии 20131208_ozdorovitelnye_meropriyatiya_na_logp._zanyatiyakh
20131208_ozdorovitelnye_meropriyatiya_na_logp._zanyatiyakh КУЛЬТУРНАЯ ПОЛИТИКА И ИДЕОЛОГИЯ ПРАГМАТИКИ
КУЛЬТУРНАЯ ПОЛИТИКА И ИДЕОЛОГИЯ ПРАГМАТИКИ www.kpmo.ru
www.kpmo.ru Системно- деятельностный подход как методологическая основа стандартов второго поколения.
Системно- деятельностный подход как методологическая основа стандартов второго поколения. Расследование и учет несчастных случаев
Расследование и учет несчастных случаев