- Разработка алгоритмов

Содержание
- 2. Сфери застосування алгоритмів пошуку найкоротших шляхів Пошук шляхів на мапах міст та країн Пошук маршрутів для
- 3. Види алгоритмів пошуку найкоротших шляхів Пошук шляху із однієї заданої точки в іншу (алгоритм A*, etc)
- 4. Постановка завдання Розробити алгоритм пошуку найкоротших шляхів для кожної пари точок на графі із кластерною топологією
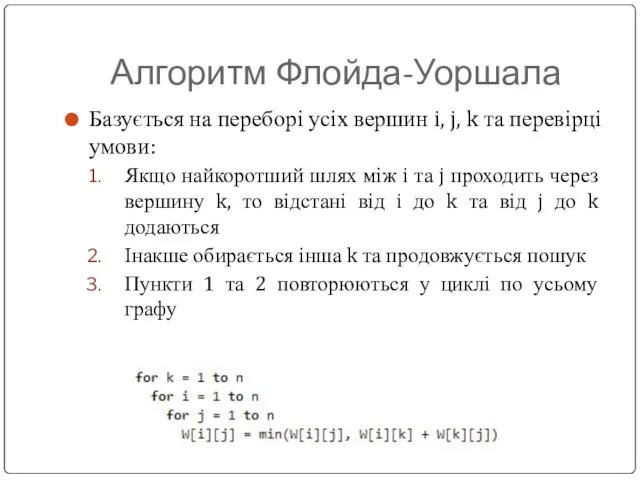
- 5. Алгоритм Флойда-Уоршала Базується на переборі усіх вершин i, j, k та перевірці умови: Якщо найкоротший шлях
- 6. Існуючі спроби рішень Паралелізація алгоритму на декількох процесорах Модифікації алгоритму Рекурсивне обрання підматриць, відновлення результату через
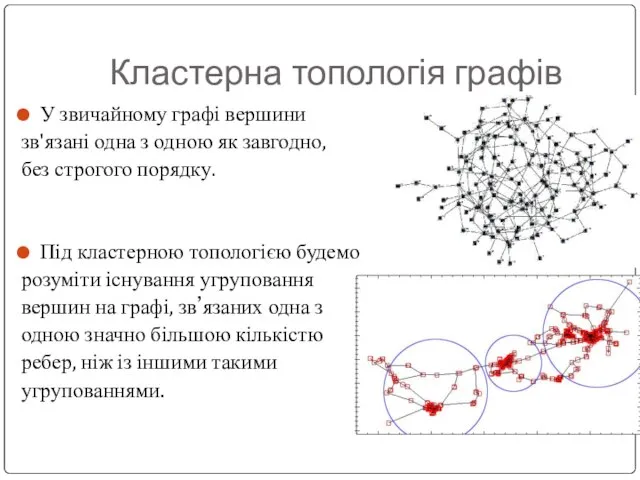
- 7. Кластерна топологія графів У звичайному графі вершини зв'язані одна з одною як завгодно, без строгого порядку.
- 8. Ідея алгоритму Алгоритм базується на принципі divide and conquer - розділяй та володарюй. Розіб’ємо задачу на
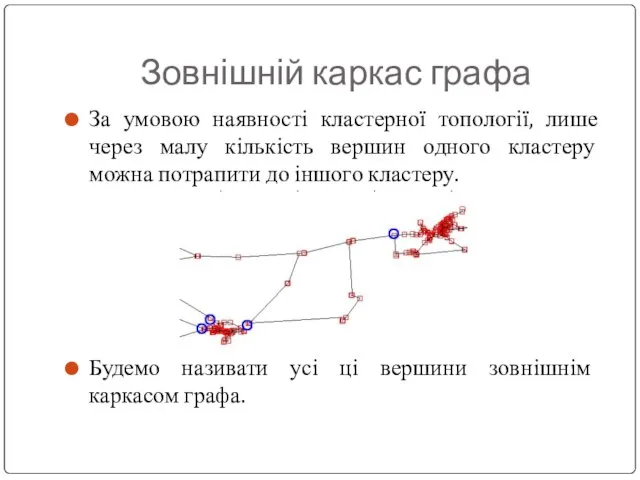
- 9. Зовнішній каркас графа За умовою наявності кластерної топології, лише через малу кількість вершин одного кластеру можна
- 10. Опис алгоритму Знаходження усіх найкоротших шляхів всередині кожного з кластерів Знаходження усіх найкоротших шляхів на зовнішньому
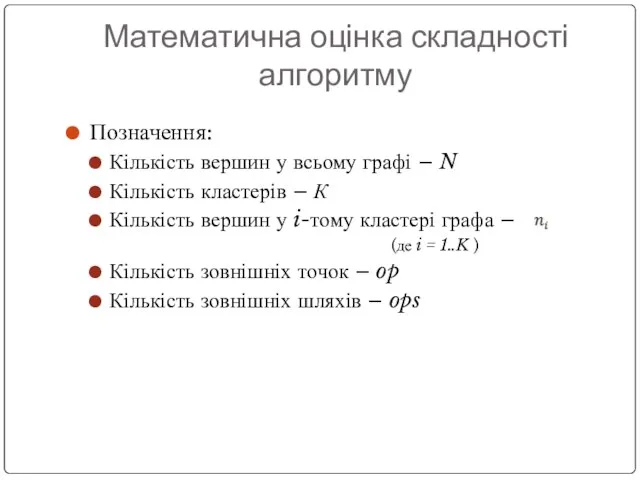
- 11. Математична оцінка складності алгоритму Позначення: Кількість вершин у всьому графі – N Кількість кластерів – К
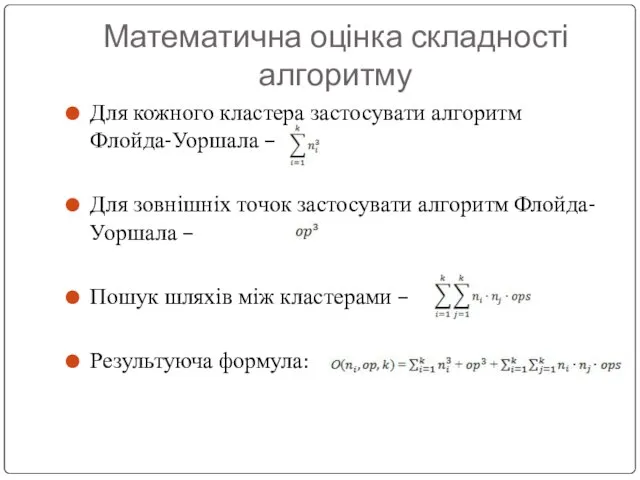
- 12. Математична оцінка складності алгоритму Для кожного кластера застосувати алгоритм Флойда-Уоршала – Для зовнішніх точок застосувати алгоритм
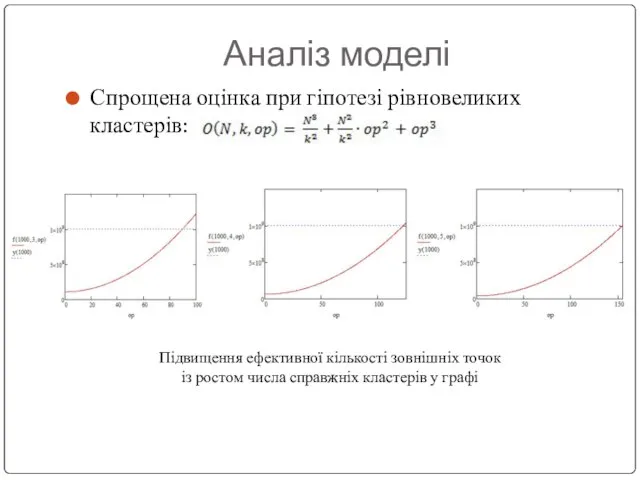
- 13. Аналіз моделі Спрощена оцінка при гіпотезі рівновеликих кластерів: Підвищення ефективної кількості зовнішніх точок із ростом числа
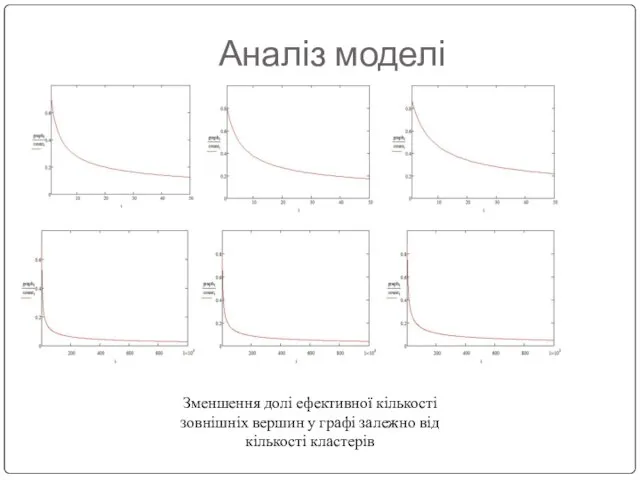
- 14. Аналіз моделі Зменшення долі ефективної кількості зовнішніх вершин у графі залежно від кількості кластерів
- 15. Вибір мови програмування Враховуючи основну вимогу до алгоритму – швидкодію, для реалізації було вирішено обрати мову
- 16. Результати роботи програми На вхід було запропоновано: Граф із більш ніж 1800 точок мапи України Автоматично
- 17. Фрагмент таблиці тестувань часу роботи
- 18. Висновки Реалізовано алгоритм пошуку найкоротших шляхів між усіма парами точок на графі із кластерною топологією. Проведено
- 19. Дякую за увагу!
- 20. Додаткові слайди
- 21. Недоліки автоматичних алгоритмів кластеризації у розглянутій задачі Невідома кількість кроків => обчислювальна складність (k-means, forel, etc)
- 23. Скачать презентацию
Слайд 2Сфери застосування алгоритмів пошуку найкоротших шляхів
Пошук шляхів на мапах міст та країн
Пошук
Сфери застосування алгоритмів пошуку найкоротших шляхів
Пошук шляхів на мапах міст та країн
Пошук
Слайд 3Види алгоритмів пошуку найкоротших шляхів
Пошук шляху із однієї заданої точки в іншу
Види алгоритмів пошуку найкоротших шляхів
Пошук шляху із однієї заданої точки в іншу
Слайд 4Постановка завдання
Розробити алгоритм пошуку найкоротших шляхів для кожної пари точок на графі
Постановка завдання
Розробити алгоритм пошуку найкоротших шляхів для кожної пари точок на графі
Слайд 5Алгоритм Флойда-Уоршала
Базується на переборі усіх вершин i, j, k та перевірці умови:
Якщо
Алгоритм Флойда-Уоршала
Базується на переборі усіх вершин i, j, k та перевірці умови:
Якщо
Слайд 6Існуючі спроби рішень
Паралелізація алгоритму на декількох процесорах
Модифікації алгоритму
Рекурсивне обрання підматриць, відновлення
Існуючі спроби рішень
Паралелізація алгоритму на декількох процесорах
Модифікації алгоритму
Рекурсивне обрання підматриць, відновлення
Слайд 7Кластерна топологія графів
У звичайному графі вершини
зв'язані одна з одною як завгодно,
без
Кластерна топологія графів
У звичайному графі вершини
зв'язані одна з одною як завгодно,
без
Слайд 8Ідея алгоритму
Алгоритм базується на принципі divide and conquer - розділяй та володарюй.
Розіб’ємо
Ідея алгоритму
Алгоритм базується на принципі divide and conquer - розділяй та володарюй.
Розіб’ємо
Слайд 9Зовнішній каркас графа
За умовою наявності кластерної топології, лише через малу кількість вершин
Зовнішній каркас графа
За умовою наявності кластерної топології, лише через малу кількість вершин
Слайд 10Опис алгоритму
Знаходження усіх найкоротших шляхів всередині кожного з кластерів
Знаходження усіх найкоротших шляхів
Опис алгоритму
Знаходження усіх найкоротших шляхів всередині кожного з кластерів
Знаходження усіх найкоротших шляхів
Слайд 11Математична оцінка складності алгоритму
Позначення:
Кількість вершин у всьому графі – N
Кількість кластерів –
Математична оцінка складності алгоритму
Позначення:
Кількість вершин у всьому графі – N
Кількість кластерів –
Слайд 12Математична оцінка складності алгоритму
Для кожного кластера застосувати алгоритм Флойда-Уоршала –
Для зовнішніх точок
Математична оцінка складності алгоритму
Для кожного кластера застосувати алгоритм Флойда-Уоршала –
Для зовнішніх точок
Слайд 13Аналіз моделі
Спрощена оцінка при гіпотезі рівновеликих кластерів:
Підвищення ефективної кількості зовнішніх точок
Аналіз моделі
Спрощена оцінка при гіпотезі рівновеликих кластерів:
Підвищення ефективної кількості зовнішніх точок
Слайд 14Аналіз моделі
Зменшення долі ефективної кількості зовнішніх вершин у графі залежно від кількості
Аналіз моделі
Зменшення долі ефективної кількості зовнішніх вершин у графі залежно від кількості
Слайд 15Вибір мови програмування
Враховуючи основну вимогу до алгоритму – швидкодію, для реалізації було
Вибір мови програмування
Враховуючи основну вимогу до алгоритму – швидкодію, для реалізації було
Слайд 16Результати роботи програми
На вхід було запропоновано:
Граф із більш ніж 1800 точок мапи
Результати роботи програми
На вхід було запропоновано:
Граф із більш ніж 1800 точок мапи
Слайд 17Фрагмент таблиці тестувань часу роботи
Фрагмент таблиці тестувань часу роботи

Слайд 18Висновки
Реалізовано алгоритм пошуку найкоротших шляхів між усіма парами точок на графі із
Висновки
Реалізовано алгоритм пошуку найкоротших шляхів між усіма парами точок на графі із
Слайд 19Дякую за увагу!
Дякую за увагу!
Слайд 20Додаткові слайди
Додаткові слайди
Слайд 21Недоліки автоматичних алгоритмів кластеризації у розглянутій задачі
Невідома кількість кроків => обчислювальна складність
Недоліки автоматичних алгоритмів кластеризації у розглянутій задачі
Невідома кількість кроків => обчислювальна складність
 Отель Royal Apart. Проект
Отель Royal Apart. Проект Избирательные системы. Политические партии. Политические элиты
Избирательные системы. Политические партии. Политические элиты Причины детской агрессии
Причины детской агрессии Отборочный тур преподавателей
Отборочный тур преподавателей Детство!
Детство! Tlenowe kompostowanie
Tlenowe kompostowanie Вова хуесос
Вова хуесос Оптимизация GPS трека
Оптимизация GPS трека Вязание на спицах. Основные приемы
Вязание на спицах. Основные приемы Презентация на тему РАЗМИНКА информационное обеспечение
Презентация на тему РАЗМИНКА информационное обеспечение  ГЕОМЕТРИЯ Планиметрия Стереометрия (раздел геометрии, (раздел геометрии. в котором изучаются свойства фигур свойства фигур в на пл
ГЕОМЕТРИЯ Планиметрия Стереометрия (раздел геометрии, (раздел геометрии. в котором изучаются свойства фигур свойства фигур в на пл Храмы Древней Индии
Храмы Древней Индии Дню Победы посвящается
Дню Победы посвящается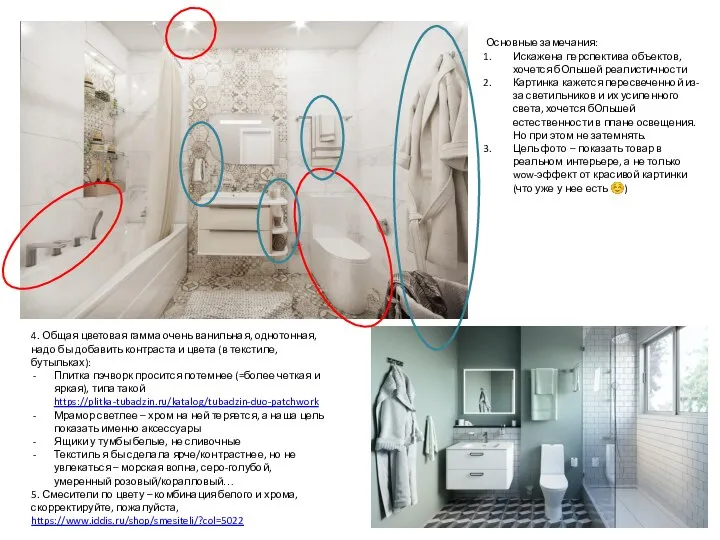 Мир плитки Атлас - керамическая плитка Tubadzin. Правки к фото
Мир плитки Атлас - керамическая плитка Tubadzin. Правки к фото Значение самоконтроля при занятиях фитнесом
Значение самоконтроля при занятиях фитнесом Презентация к 300-летию М.В. Ломоносова
Презентация к 300-летию М.В. Ломоносова ПРЕЗЕНТАЦИЯ К УРОКУ по теме«Первоначальные сведения о колебательном движении»
ПРЕЗЕНТАЦИЯ К УРОКУ по теме«Первоначальные сведения о колебательном движении» Презентация на тему Ипотечное кредитование
Презентация на тему Ипотечное кредитование  Искусство в жизни М.В.Ломоносова
Искусство в жизни М.В.Ломоносова Интеллектуальная собственность
Интеллектуальная собственность Презентация на тему Ребенок в школе (6 класс)
Презентация на тему Ребенок в школе (6 класс) Организация летнего оздоровительного отдыха детей
Организация летнего оздоровительного отдыха детей Презентация на тему Общество 3 класс
Презентация на тему Общество 3 класс Чипирование пушномеховых товаров
Чипирование пушномеховых товаров Мотивационная программа
Мотивационная программа Из истории возникновения функции
Из истории возникновения функции Презентация на тему Быт простых и знатных людей
Презентация на тему Быт простых и знатных людей  Использование мнемотаблиц и тактильных дощечек в обучении старших дошкольников с нарушением зрения Выполнила воспитатель МДО
Использование мнемотаблиц и тактильных дощечек в обучении старших дошкольников с нарушением зрения Выполнила воспитатель МДО