Уточнение сеточной модели трехмерной сцены, предварительновосстановленной по малому количеству характеристических точек
- Уточнение сеточной модели трехмерной сцены, предварительновосстановленной по малому количеству характеристических точек

Содержание
- 2. Подходы к восстановлению трехмерных сцен Плотное восстановление (стерео подход) Восстановление сетки характеристических точек
- 3. Алгоритм факторизации в качестве способа первичного восстановления
- 4. Примеры результатов восстановления сцен алгоритмами факторизации Небольшое количество точек и автоматическая триангуляция часто приводят к несоответствию
- 5. Схема алгоритма уточнения сеточной модели
- 6. Поиск новых характеристических точек с помощью детектора Харриса Выбираем (вручную) из исходной последовательности два кадра На
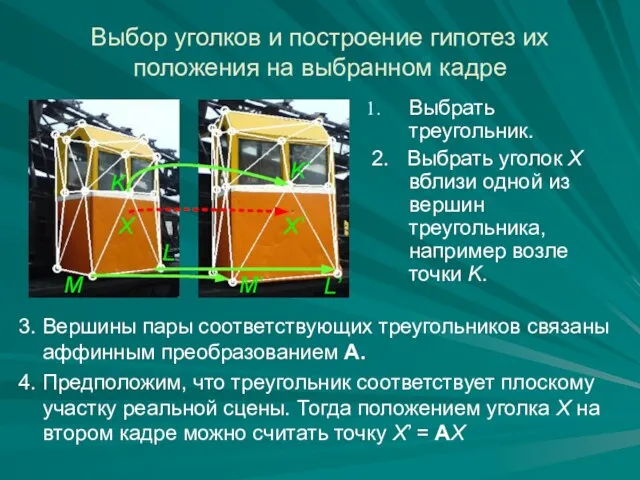
- 7. Выбор уголков и построение гипотез их положения на выбранном кадре 3. Вершины пары соответствующих треугольников связаны
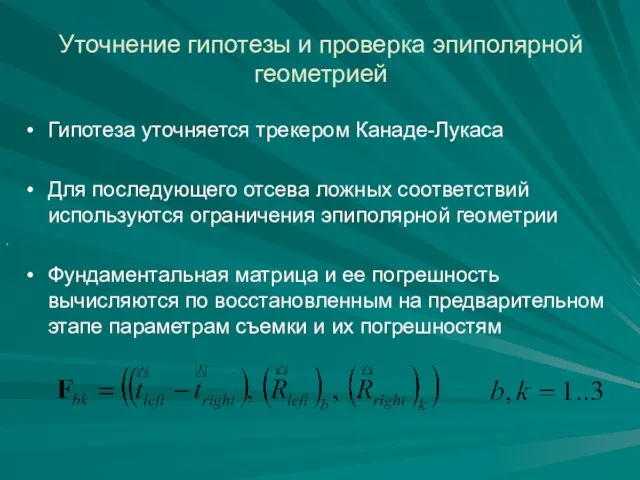
- 8. Уточнение гипотезы и проверка эпиполярной геометрией Гипотеза уточняется трекером Канаде-Лукаса Для последующего отсева ложных соответствий используются
- 9. Результаты уточнения сеточной модели + Количество восстановленных точек сцены увеличено + Сеточная модель уточнена Необходим более
- 10. Заключение Предложен подход к восстановлению трехмерных сцен Для восстановления используются изображения неподвижной сцены, полученные вручную с
- 12. Скачать презентацию
Слайд 2Подходы к восстановлению трехмерных сцен
Плотное восстановление (стерео подход)
Восстановление сетки характеристических точек
Подходы к восстановлению трехмерных сцен
Плотное восстановление (стерео подход)
Восстановление сетки характеристических точек

Слайд 3Алгоритм факторизации в качестве способа первичного восстановления
Алгоритм факторизации в качестве способа первичного восстановления

Слайд 4Примеры результатов восстановления сцен алгоритмами факторизации
Небольшое количество точек и
автоматическая триангуляция
часто приводят к
Примеры результатов восстановления сцен алгоритмами факторизации
Небольшое количество точек и автоматическая триангуляция часто приводят к

Слайд 5Схема алгоритма уточнения сеточной модели
Схема алгоритма уточнения сеточной модели

Слайд 6Поиск новых характеристических точек с помощью детектора Харриса
Выбираем (вручную) из исходной последовательности
Поиск новых характеристических точек с помощью детектора Харриса
Выбираем (вручную) из исходной последовательности

Слайд 7Выбор уголков и построение гипотез их положения на выбранном кадре
3. Вершины пары
Выбор уголков и построение гипотез их положения на выбранном кадре
3. Вершины пары
Слайд 8Уточнение гипотезы и проверка эпиполярной геометрией
Гипотеза уточняется трекером Канаде-Лукаса
Для последующего отсева ложных
Уточнение гипотезы и проверка эпиполярной геометрией
Гипотеза уточняется трекером Канаде-Лукаса
Для последующего отсева ложных
Слайд 9Результаты уточнения сеточной модели
+ Количество восстановленных точек сцены увеличено
+ Сеточная модель уточнена
Необходим
Результаты уточнения сеточной модели
+ Количество восстановленных точек сцены увеличено
+ Сеточная модель уточнена
Необходим

Слайд 10Заключение
Предложен подход к восстановлению трехмерных сцен
Для восстановления используются изображения неподвижной сцены, полученные
Заключение
Предложен подход к восстановлению трехмерных сцен
Для восстановления используются изображения неподвижной сцены, полученные
 Positive traits of character - Persistence
Positive traits of character - Persistence слайд-шоу фокусника-иллюзиониста Леонида Зангиева
слайд-шоу фокусника-иллюзиониста Леонида Зангиева Ножницы вашей мечты
Ножницы вашей мечты Металлы. Общая характеристика металлов (нахождение в природе и физические свойства)
Металлы. Общая характеристика металлов (нахождение в природе и физические свойства) Оказание первой помощи. Современные требования
Оказание первой помощи. Современные требования ГАРАНТИРОВАННЫЙ ОБЪЕМ БЕСПЛАТНОЙ МЕДИЦИНСКОЙ ПОМОЩИ(ГОБМП)
ГАРАНТИРОВАННЫЙ ОБЪЕМ БЕСПЛАТНОЙ МЕДИЦИНСКОЙ ПОМОЩИ(ГОБМП) ГЕОГРАФИЯ РОССИИ СТРУКТУРА КУРСА
ГЕОГРАФИЯ РОССИИ СТРУКТУРА КУРСА Геологичекое строение и рельеф
Геологичекое строение и рельеф История происхождения фамилий жителей села Батурино
История происхождения фамилий жителей села Батурино Специальные налоговые режимы_Упрощенная система налогобложения
Специальные налоговые режимы_Упрощенная система налогобложения «Компьютерная зависимость детей»
«Компьютерная зависимость детей» Реклама в фильме Римские каникулы (1953)
Реклама в фильме Римские каникулы (1953) Описание памятника архитектуры
Описание памятника архитектуры Coca-Cola
Coca-Cola Унитазы Culto
Унитазы Culto Графическй дизайн в школьной тетраде
Графическй дизайн в школьной тетраде От Сиднея вдоль Большого Водораздельного хребта
От Сиднея вдоль Большого Водораздельного хребта Matematika_19_09_1
Matematika_19_09_1 Портфолио Агентства маркетинговых коммуникаций Чистяковой Ирины PR сопровождение проекта "ГлавМаркет"
Портфолио Агентства маркетинговых коммуникаций Чистяковой Ирины PR сопровождение проекта "ГлавМаркет" Критерии и показатели оценки деятельности таможенных органов России
Критерии и показатели оценки деятельности таможенных органов России  Развитие культуры
Развитие культуры Иркутск, 2011
Иркутск, 2011 Дорога на родину И.С.Тургенева
Дорога на родину И.С.Тургенева Теория привязанностей
Теория привязанностей Рабочая группаРоссийской академии медицинских наук
Рабочая группаРоссийской академии медицинских наук Стоимость нефти и авиаГСМ
Стоимость нефти и авиаГСМ Мучные изделия
Мучные изделия Понятие вектора
Понятие вектора