- Замкнутые системы привода двигателя по скорости, току

Содержание
- 3. Основу данной системы составляет разомкнутая схема П - Д. На валу ДПТНВ находится датчик скорости -
- 4. Сигнал обратной связи UTГ =γω = Uoc сравнивается с задающим сигналом скорости Uзс, и их разность
- 5. Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что ДПТ работает под нагрузкой в
- 6. Таким образом, благодаря наличию обратной связи осуществляется автоматическое регулирование ЭДС преобразователя, а значит, и подводимого к
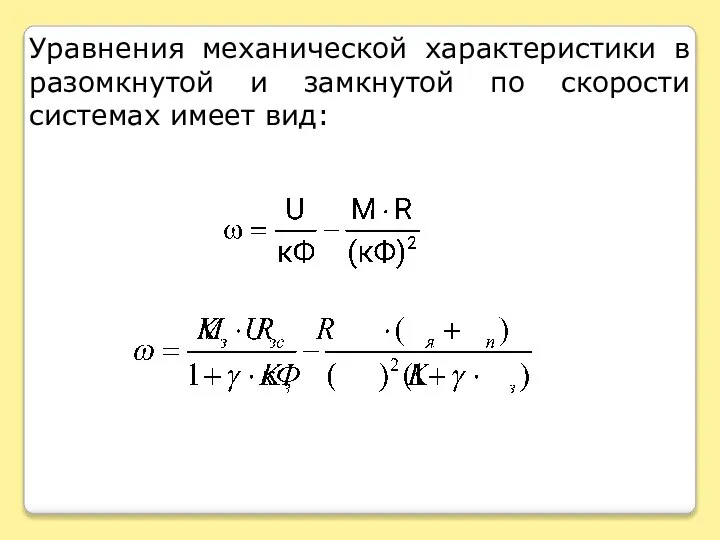
- 7. Уравнения механической характеристики в разомкнутой и замкнутой по скорости системах имеет вид:
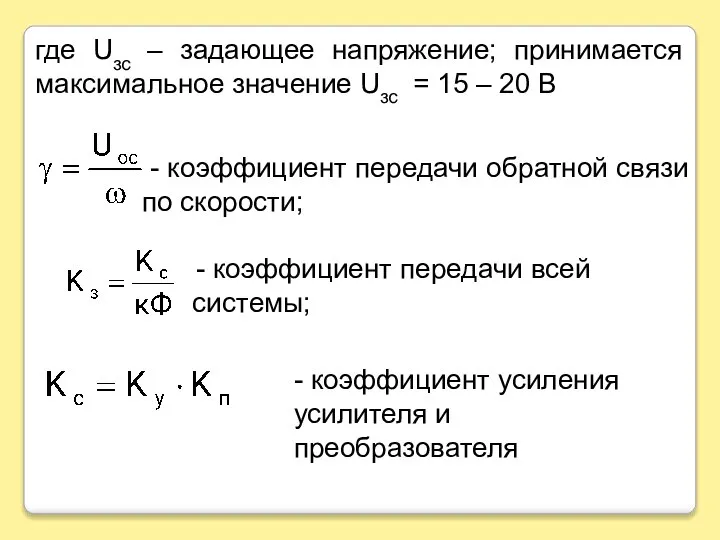
- 8. где Uзс – задающее напряжение; принимается максимальное значение Uзс = 15 – 20 В - коэффициент
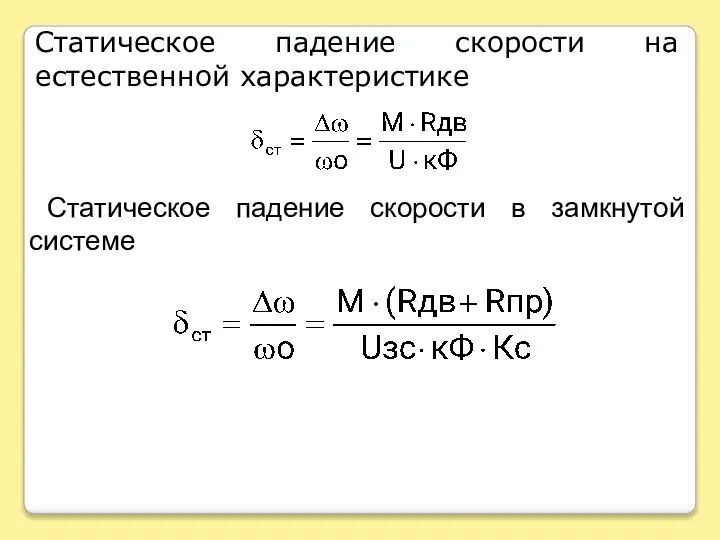
- 9. Статическое падение скорости на естественной характеристике Статическое падение скорости в замкнутой системе
- 10. Коэффициент передачи системы, обеспечивающий при данном Uзс скорость холостого хода, как и в разомкнутой системе.
- 11. Замкнутая система с отрицательной обратной связью по напряжению предназначена для стабилизации напряжения. Датчиком является потенциометр, включенный
- 12. Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной обратной связи по току
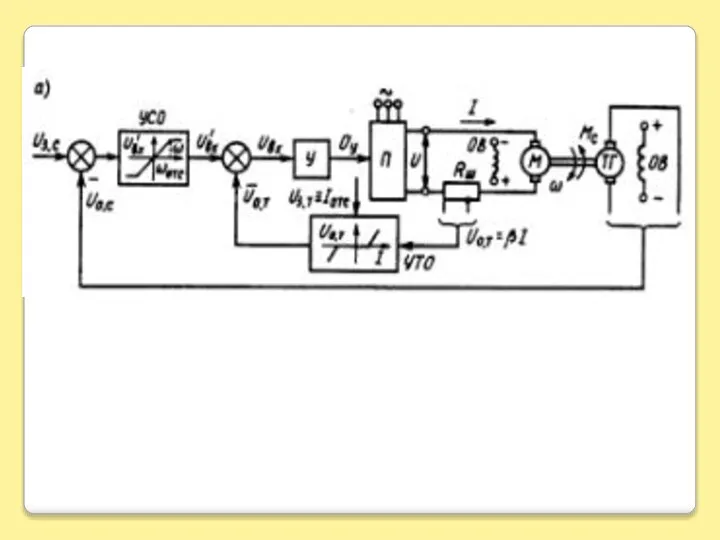
- 15. В качестве датчика тока в этой системе ЭП используется шунт с сопротивлением Rш, падение напряжения на
- 16. Сигнал обратной связи Uот поступает на узел токоограничения УТО, называемый также узлом токовой отсечки, вместе с
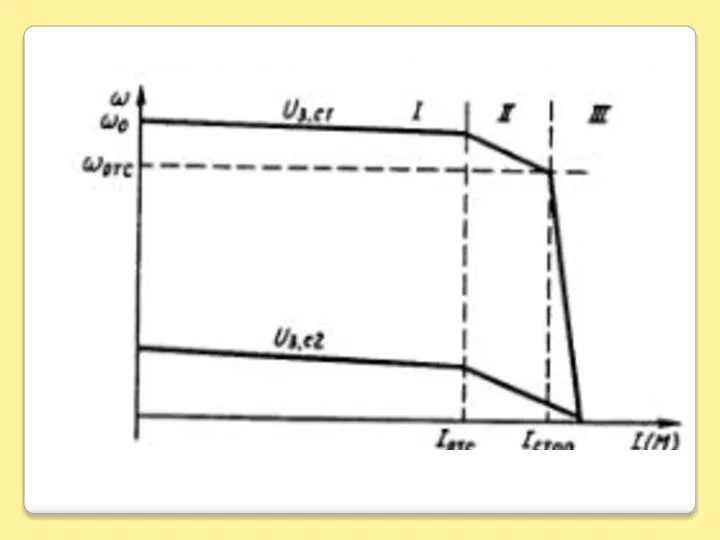
- 17. Работа УТО в соответствии с его характеристикой Uот(I) происходит следующим образом. При токе в якоре меньше
- 18. Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току
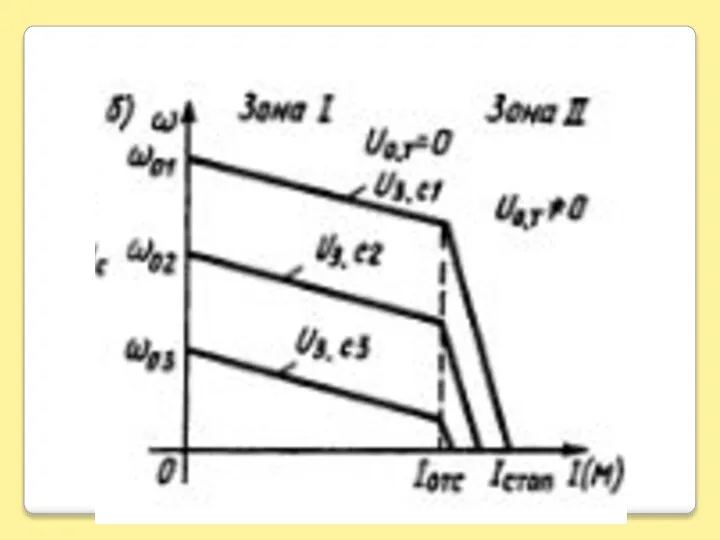
- 21. Для получения жестких характеристик ЭП, необходимых для регулирования скорости, и мягких характеристик, требуемых для ограничения тока
- 22. Приведенная схема соответствует схеме с общим усилителем и нелинейными обратными связями, которые определяют разделение области механических
- 23. В зоне II при I > Iотс вступает в действие обратная связь по току и характеристики
- 25. Скачать презентацию
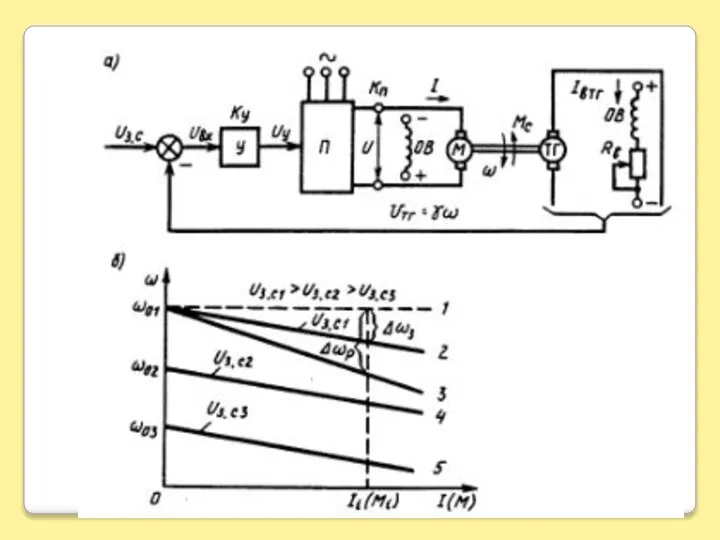
Слайд 3 Основу данной системы составляет разомкнутая схема П - Д.
На валу ДПТНВ
Основу данной системы составляет разомкнутая схема П - Д.
На валу ДПТНВ
Слайд 4 Сигнал обратной связи UTГ =γω = Uoc сравнивается с задающим сигналом скорости
Сигнал обратной связи UTГ =γω = Uoc сравнивается с задающим сигналом скорости
Слайд 5 Рассмотрим физическую сторону процесса регулирования скорости в данной системе.
Предположим, что ДПТ
Рассмотрим физическую сторону процесса регулирования скорости в данной системе.
Предположим, что ДПТ
Слайд 6 Таким образом, благодаря наличию обратной связи осуществляется автоматическое регулирование ЭДС преобразователя, а
Таким образом, благодаря наличию обратной связи осуществляется автоматическое регулирование ЭДС преобразователя, а
Слайд 7Уравнения механической характеристики в разомкнутой и замкнутой по скорости системах имеет вид:
Уравнения механической характеристики в разомкнутой и замкнутой по скорости системах имеет вид:
Слайд 8где Uзс – задающее напряжение; принимается максимальное значение Uзс = 15 –
где Uзс – задающее напряжение; принимается максимальное значение Uзс = 15 –
Слайд 9Статическое падение скорости на естественной характеристике
Статическое падение скорости в замкнутой системе
Статическое падение скорости на естественной характеристике
Статическое падение скорости в замкнутой системе
Слайд 10Коэффициент передачи системы, обеспечивающий при данном Uзс скорость холостого хода, как и
Коэффициент передачи системы, обеспечивающий при данном Uзс скорость холостого хода, как и
Слайд 11 Замкнутая система с отрицательной обратной связью по напряжению предназначена для стабилизации напряжения.
Замкнутая система с отрицательной обратной связью по напряжению предназначена для стабилизации напряжения.
Слайд 12Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной
Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной
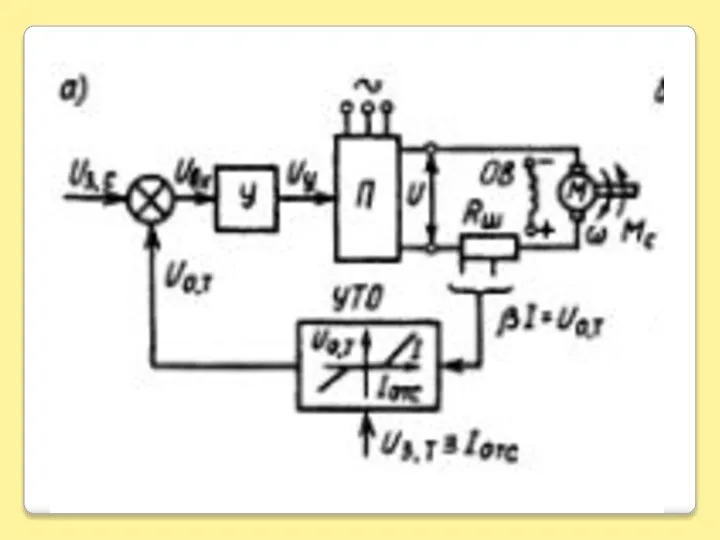
Слайд 15 В качестве датчика тока в этой системе ЭП используется шунт с сопротивлением
В качестве датчика тока в этой системе ЭП используется шунт с сопротивлением
Слайд 16 Сигнал обратной связи Uот поступает на узел токоограничения УТО, называемый также узлом
Сигнал обратной связи Uот поступает на узел токоограничения УТО, называемый также узлом
Слайд 17 Работа УТО в соответствии с его характеристикой Uот(I) происходит следующим образом.
При
Работа УТО в соответствии с его характеристикой Uот(I) происходит следующим образом.
При
Слайд 18Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по
Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по
Слайд 21 Для получения жестких характеристик ЭП, необходимых для регулирования скорости, и мягких
Для получения жестких характеристик ЭП, необходимых для регулирования скорости, и мягких
Слайд 22 Приведенная схема соответствует схеме с общим усилителем и нелинейными обратными связями, которые
Приведенная схема соответствует схеме с общим усилителем и нелинейными обратными связями, которые
Слайд 23 В зоне II при I > Iотс вступает в действие обратная связь
В зоне II при I > Iотс вступает в действие обратная связь
 Деепричастие
Деепричастие Продажа помещения. Фото (11)
Продажа помещения. Фото (11) Действия с фрагментами рисунка
Действия с фрагментами рисунка Развитие взглядов на природу света. Скорость света
Развитие взглядов на природу света. Скорость света Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн
Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн Экстремумы функции
Экстремумы функции ФГОС
ФГОС Презентация на тему Прямоугольный параллелепипед
Презентация на тему Прямоугольный параллелепипед Байкал
Байкал Презентация на тему Особенности размножения рыб 7 класс
Презентация на тему Особенности размножения рыб 7 класс  Константин Дмитриевич Флавицкий. Княжна Тараканова
Константин Дмитриевич Флавицкий. Княжна Тараканова Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы
Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы Товары для малышей. Торговая марка Markus
Товары для малышей. Торговая марка Markus Домодедово, Каширское ш. 3
Домодедово, Каширское ш. 3 Костромское деревянное зодчество
Костромское деревянное зодчество My future
My future Принципы решения научных задач в медицине
Принципы решения научных задач в медицине Презентация на тему Как человек открывал Землю
Презентация на тему Как человек открывал Землю  Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться
Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться Презентация на тему Химический элемент - водород
Презентация на тему Химический элемент - водород Эмоционально творческое развитие дошкольников посредством цветотерапии
Эмоционально творческое развитие дошкольников посредством цветотерапии Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ
Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет
Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде
Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде Вводные слова и вводные предложения. Вставные конструкции
Вводные слова и вводные предложения. Вставные конструкции Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас!
Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас! Справочник «Полиграфия Украины»
Справочник «Полиграфия Украины» Новинки в ассортименте фасадной плитки Hauberk-2021
Новинки в ассортименте фасадной плитки Hauberk-2021