- English Time. Час Англійської. Електродвигун. Lesson 22

Содержание
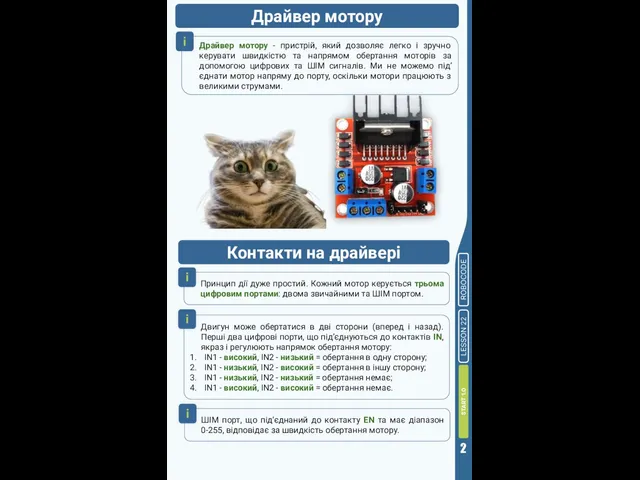
- 2. Драйвер мотору Драйвер мотору - пристрій, який дозволяє легко і зручно керувати швидкістю та напрямом обертання
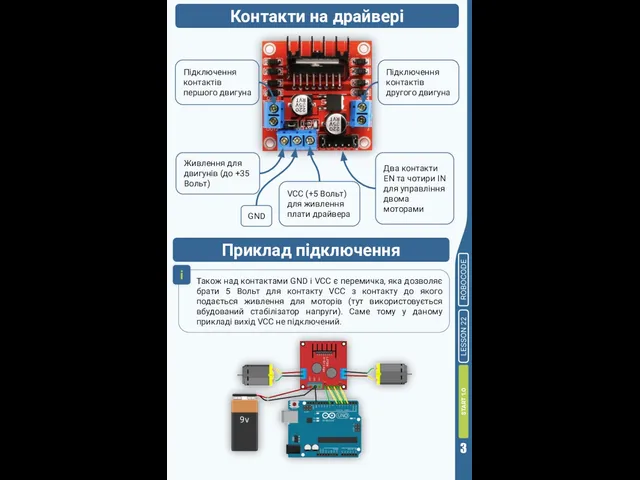
- 3. Контакти на драйвері Підключення контактів першого двигуна Підключення контактів другого двигуна Живлення для двигунів (до +35
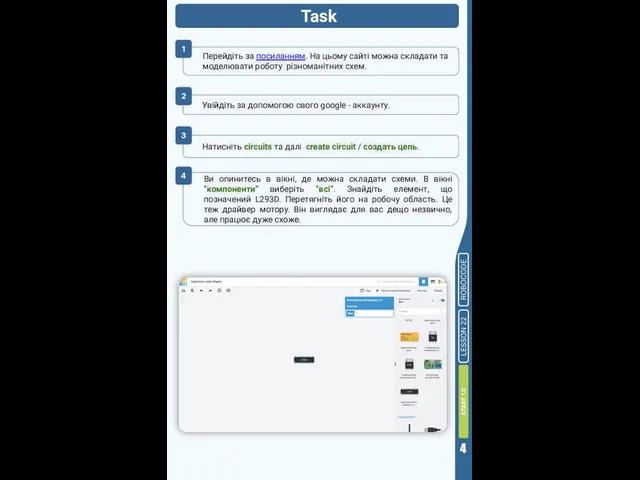
- 4. Task Перейдіть за посиланням. На цьому сайті можна складати та моделювати роботу різноманітних схем. Увійдіть за
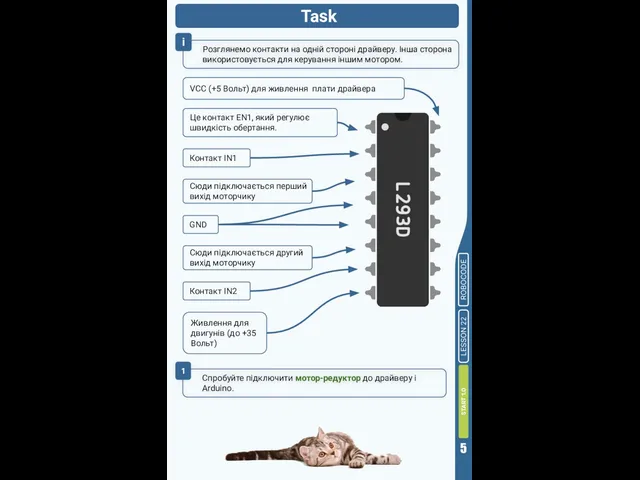
- 5. Task Розглянемо контакти на одній стороні драйверу. Інша сторона використовується для керування іншим мотором. i Це
- 7. Скачать презентацию
Слайд 3Контакти на драйвері
Підключення контактів першого двигуна
Підключення контактів другого двигуна
Живлення для двигунів (до
Контакти на драйвері
Підключення контактів першого двигуна
Підключення контактів другого двигуна
Живлення для двигунів (до
Слайд 4 Task
Перейдіть за посиланням. На цьому сайті можна складати та моделювати
Task
Перейдіть за посиланням. На цьому сайті можна складати та моделювати
Слайд 5 Task
Розглянемо контакти на одній стороні драйверу. Інша сторона використовується для
Task
Розглянемо контакти на одній стороні драйверу. Інша сторона використовується для
 Whats the weather like
Whats the weather like Shopping, shops
Shopping, shops A law firm’s structure and practice
A law firm’s structure and practice Презентация на тему Погода
Презентация на тему Погода  Meaning of words in English
Meaning of words in English Beer addiction
Beer addiction Reported Speech
Reported Speech Do you know this famous address?
Do you know this famous address? Learn play
Learn play Проект. Инфляционная модель возникновения Вселенной
Проект. Инфляционная модель возникновения Вселенной Michelangelo di Lodovico Buonarroti Simoni
Michelangelo di Lodovico Buonarroti Simoni Technology All Around Us
Technology All Around Us Canary in the coal mine
Canary in the coal mine Body Parts Hidden Pictures Game
Body Parts Hidden Pictures Game Анализ УМК Английский в фокусе 2Spotlight 2
Анализ УМК Английский в фокусе 2Spotlight 2 Презентация на тему How did you spend your holidays (Как ты провел каникулы)
Презентация на тему How did you spend your holidays (Как ты провел каникулы)  Цвета
Цвета My favorite season
My favorite season Present Continuous Tense
Present Continuous Tense Презентация на тему: Анализ финансовых результатов деятельности предприятия участника вэд
Презентация на тему: Анализ финансовых результатов деятельности предприятия участника вэд Warm up bullfinch (часть 1)
Warm up bullfinch (часть 1) At the office - hell is close, join the party
At the office - hell is close, join the party About Switzerland and Kazakhstan
About Switzerland and Kazakhstan Let's write a poem!
Let's write a poem! Computers where, there, everywhere
Computers where, there, everywhere I like the cat. Love
I like the cat. Love She, he, they. Тест
She, he, they. Тест Circus. Present continuous
Circus. Present continuous