- Энергетические методы расчёта упругих систем

Содержание
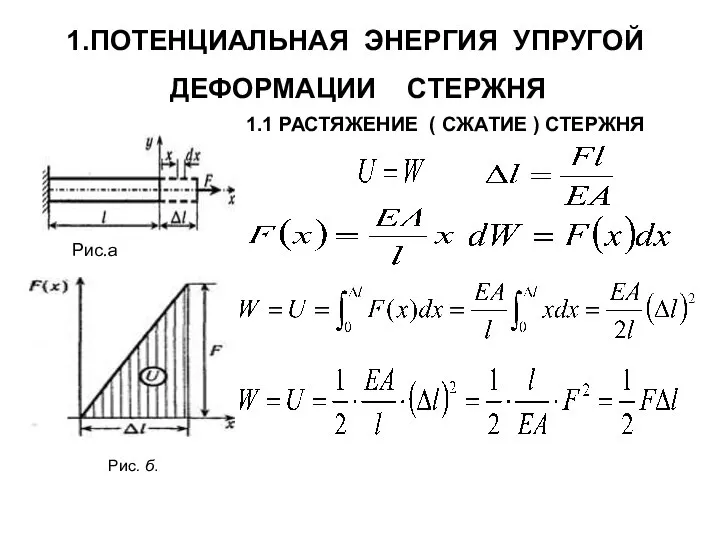
- 3. 1.ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ УПРУГОЙ ДЕФОРМАЦИИ СТЕРЖНЯ 1.1 РАСТЯЖЕНИЕ ( СЖАТИЕ ) СТЕРЖНЯ Рис.а Рис. б.
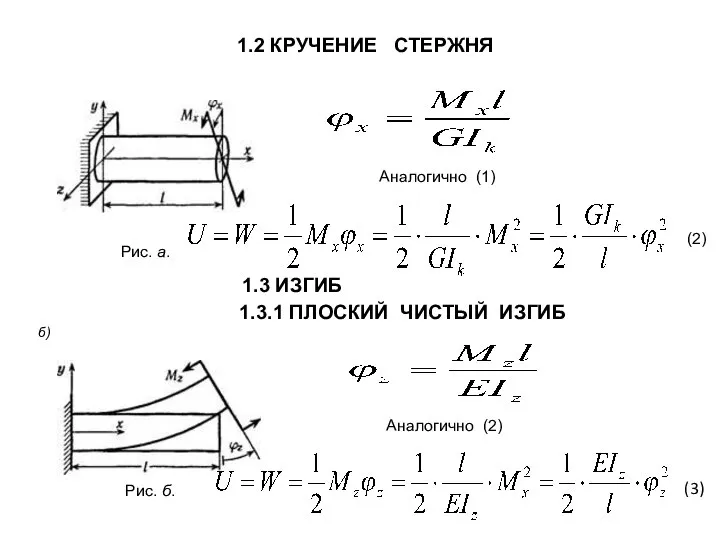
- 4. 1.2 КРУЧЕНИЕ СТЕРЖНЯ а) Аналогично (1) (2) 1.3 ИЗГИБ б) 1.3.1 ПЛОСКИЙ ЧИСТЫЙ ИЗГИБ Аналогично (2)
- 5. 1.3.2 ПЛОСКИЙ ИЗГИБ Mz(x) ≠ const. Соотношение (3) применимо к участку длинной dx Вклад в потенциальную
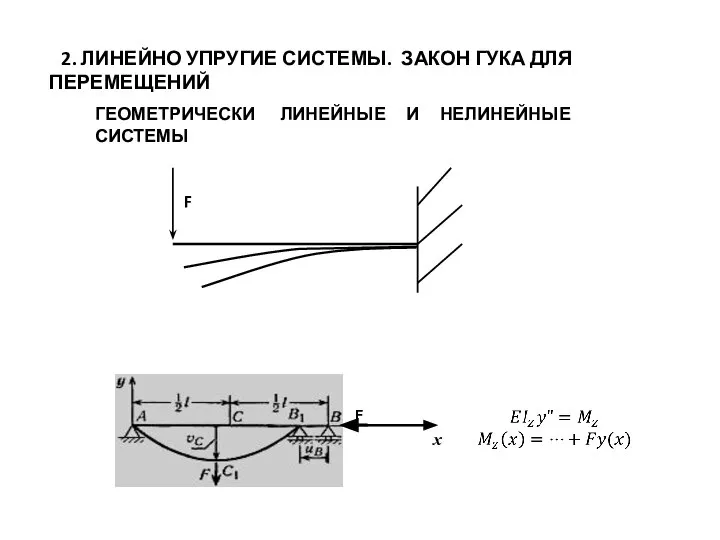
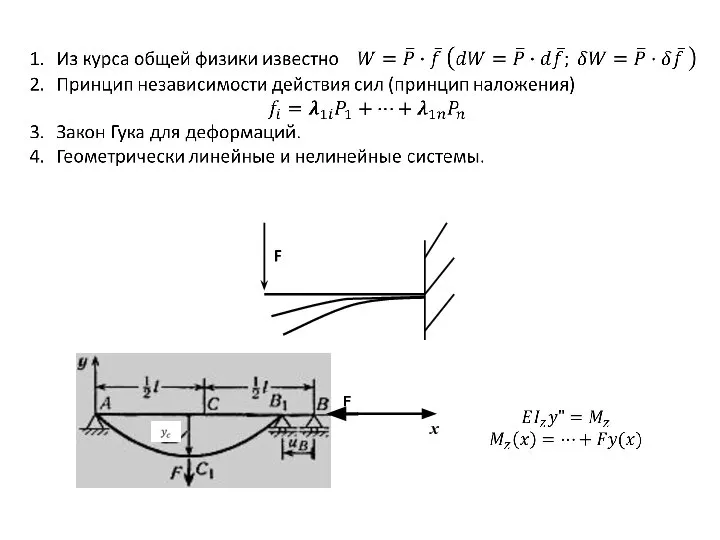
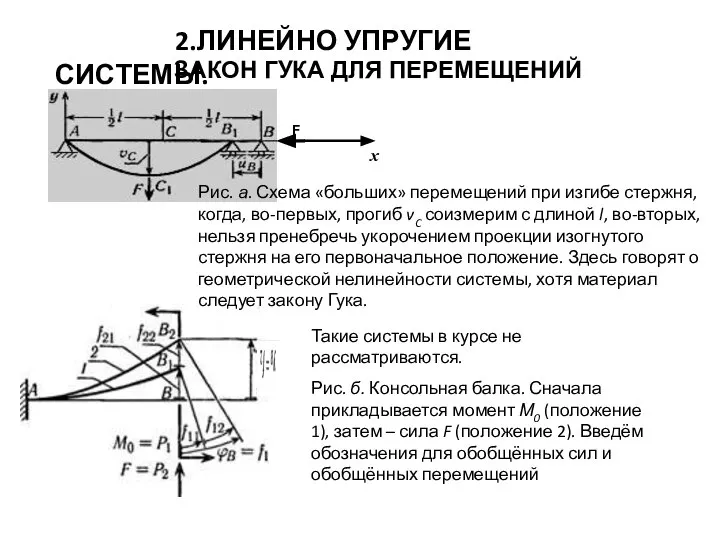
- 6. 2. ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ. ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ ГЕОМЕТРИЧЕСКИ ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СИСТЕМЫ
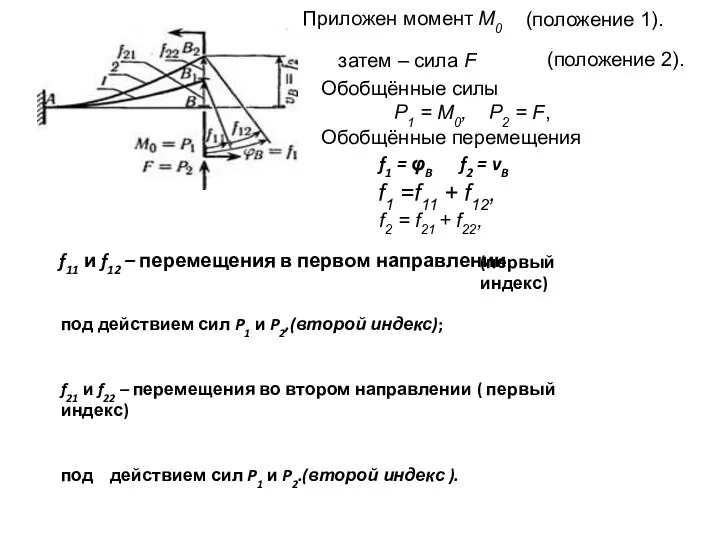
- 7. Приложен момент М0 затем – сила F (положение 1). (положение 2). Обобщённые силы P1 = M0,
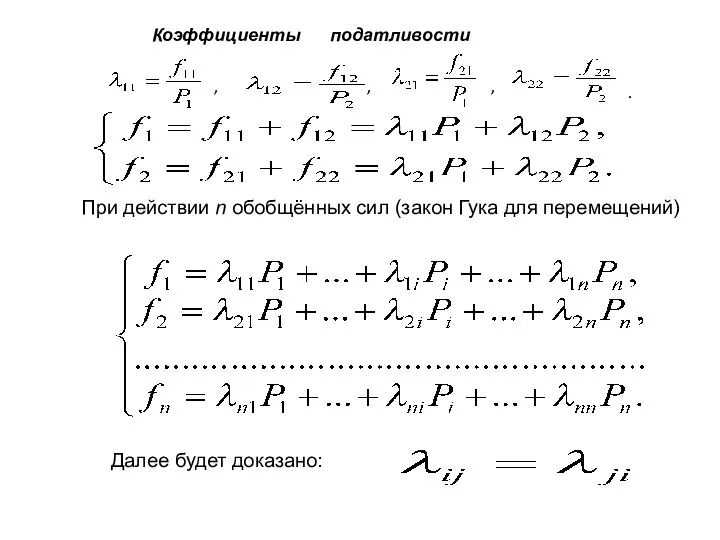
- 8. Коэффициенты податливости , , , . При действии n обобщённых сил (закон Гука для перемещений) Далее
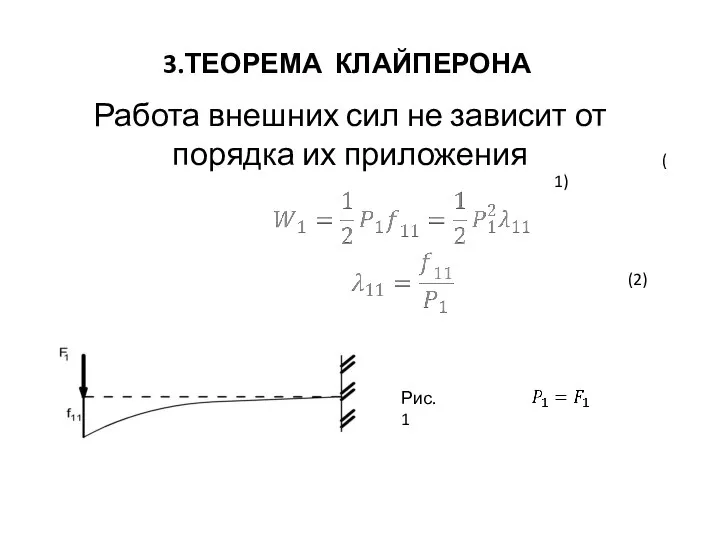
- 9. Работа внешних сил не зависит от порядка их приложения (1) (2) Рис.1 3.ТЕОРЕМА КЛАЙПЕРОНА
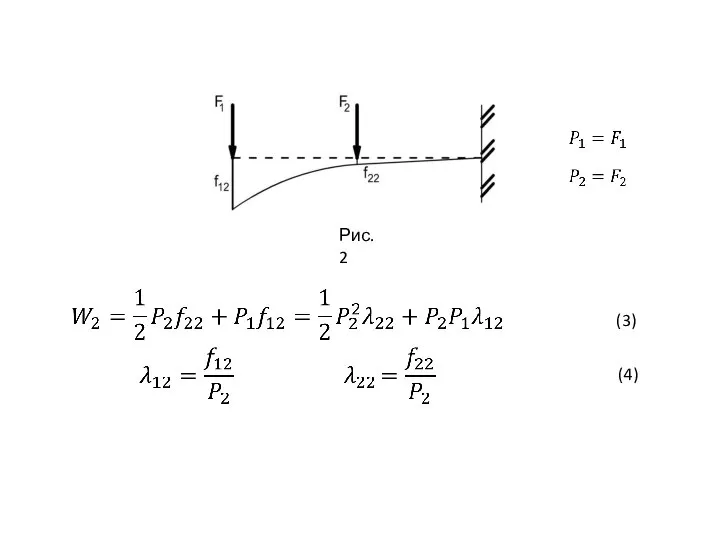
- 10. (3) (4) Рис.2
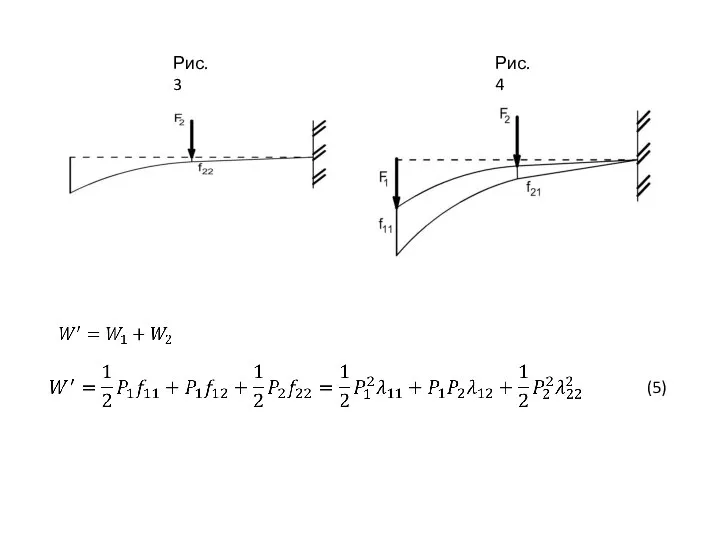
- 11. (5) Рис.3 Рис.4
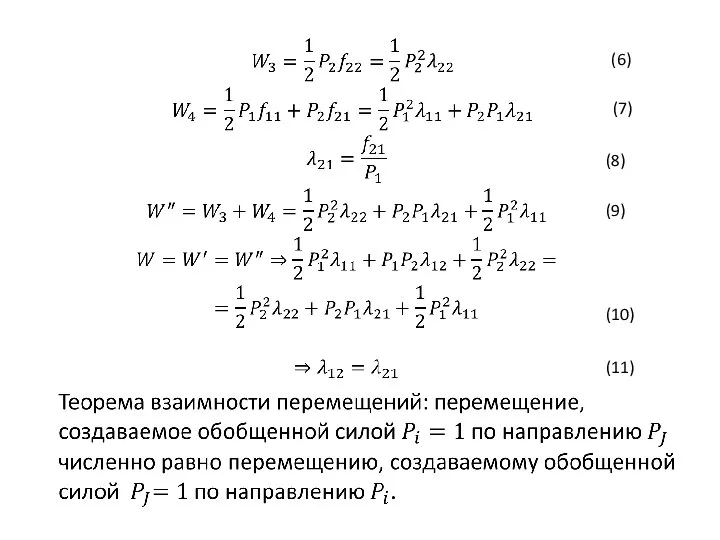
- 12. (8) (9) (10) (11) (7) (6)
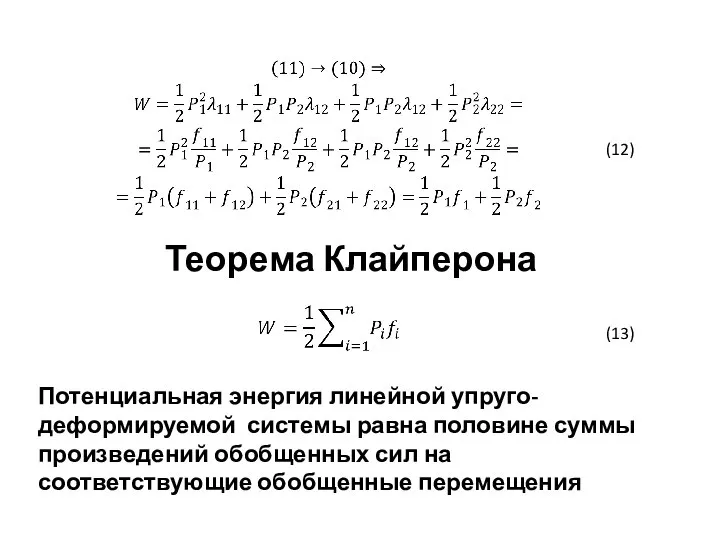
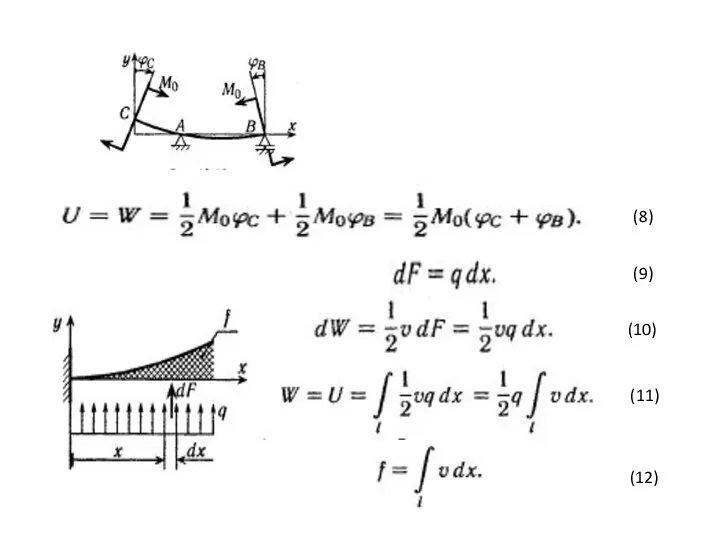
- 13. (12) Теорема Клайперона (13) Потенциальная энергия линейной упруго-деформируемой системы равна половине суммы произведений обобщенных сил на
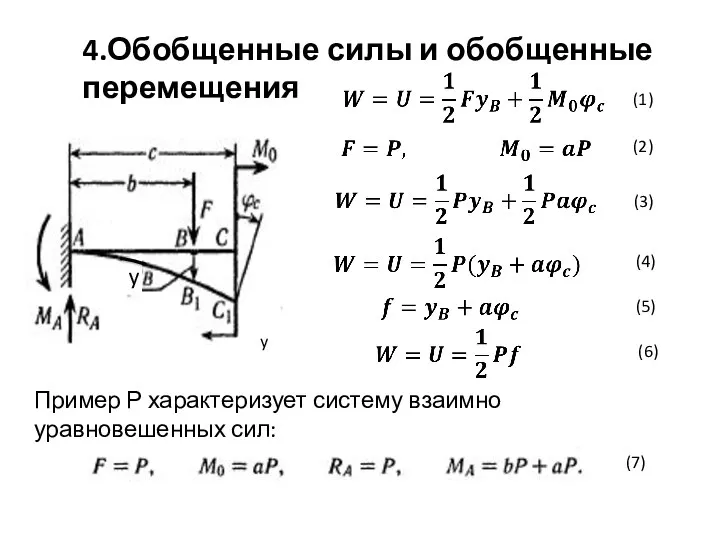
- 14. (1) (2) (3) (4) (5) y (6) Пример Р характеризует систему взаимно уравновешенных сил: (7) 4.Обобщенные
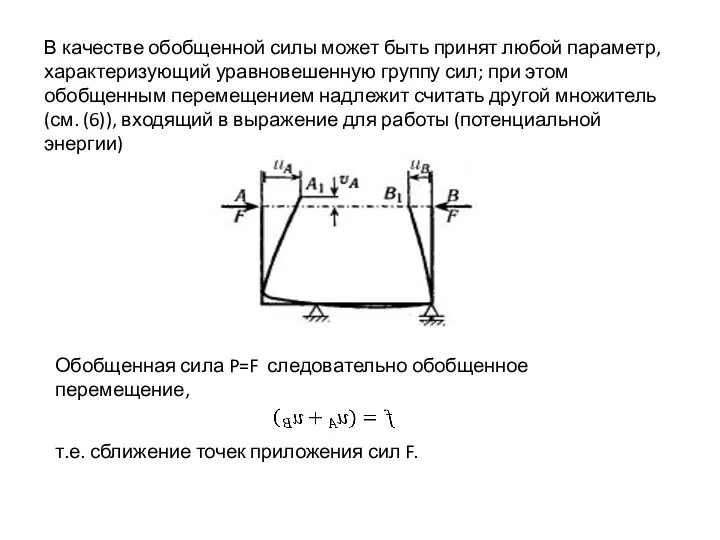
- 15. В качестве обобщенной силы может быть принят любой параметр, характеризующий уравновешенную группу сил; при этом обобщенным
- 16. (8) (9) (10) (11) (12)
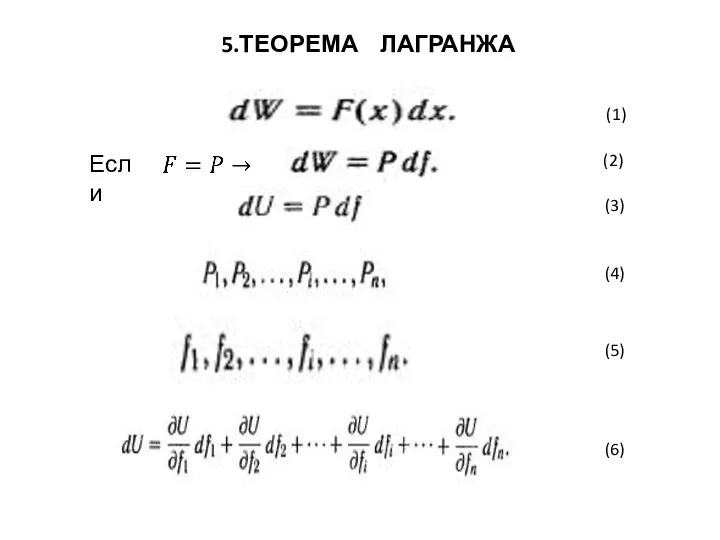
- 17. Если (1) (2) (3) (4) (5) (6) 5.ТЕОРЕМА ЛАГРАНЖА
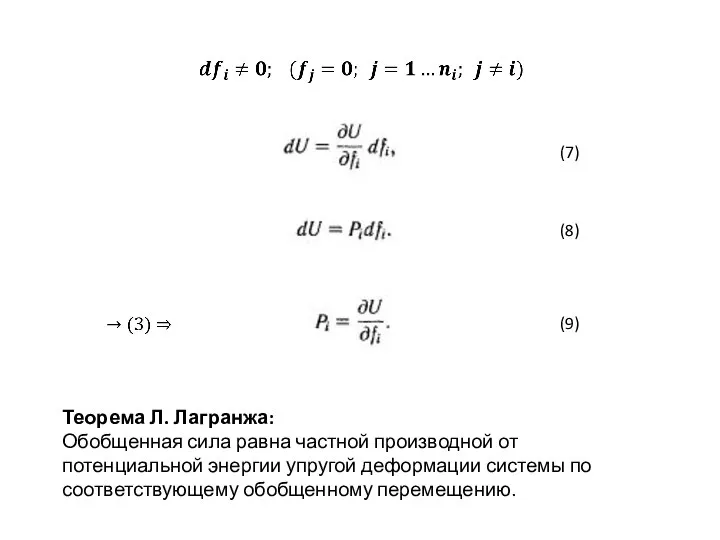
- 18. (7) (8) (9) Теорема Л. Лагранжа: Обобщенная сила равна частной производной от потенциальной энергии упругой деформации
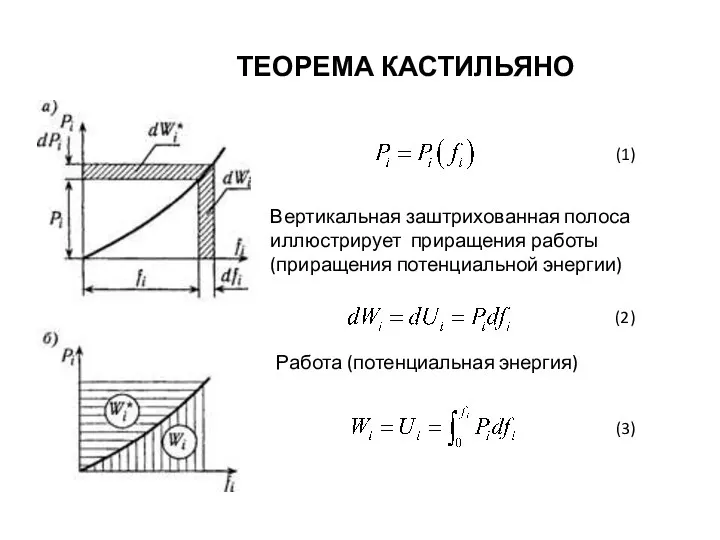
- 19. ТЕОРЕМА КАСТИЛЬЯНО . Вертикальная заштрихованная полоса иллюстрирует приращения работы (приращения потенциальной энергии) Работа (потенциальная энергия) (1)
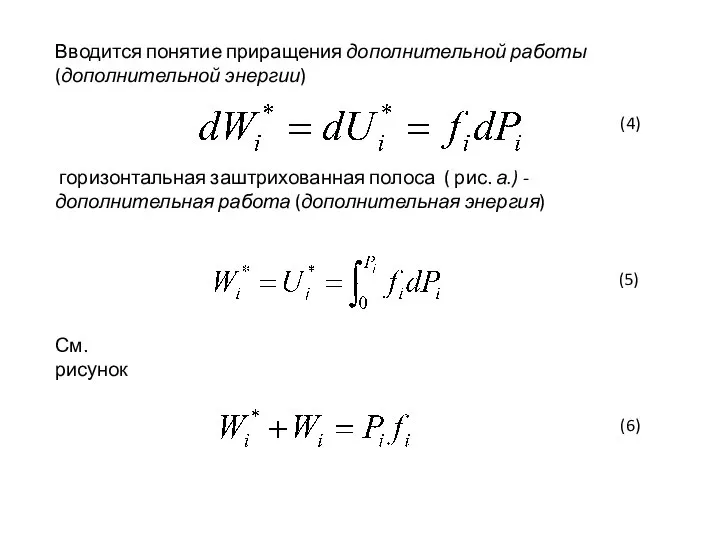
- 20. Вводится понятие приращения дополнительной работы (дополнительной энергии) горизонтальная заштрихованная полоса ( рис. а.) - дополнительная работа
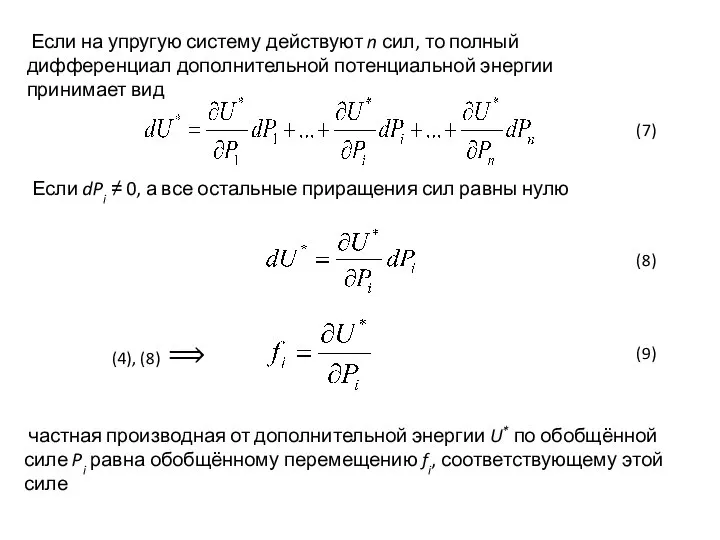
- 21. Если на упругую систему действуют n сил, то полный дифференциал дополнительной потенциальной энергии принимает вид (4),
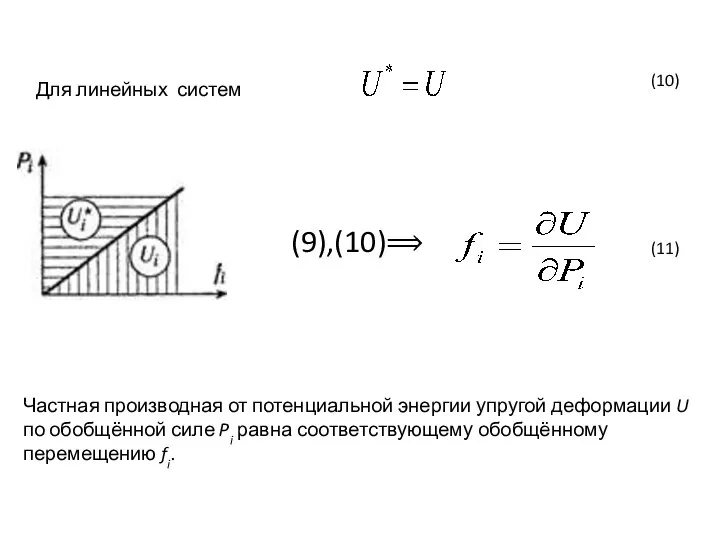
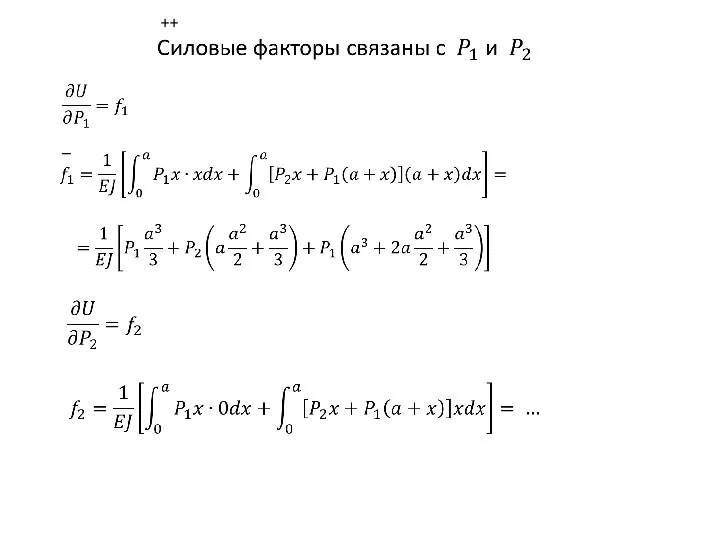
- 22. Для линейных систем . Частная производная от потенциальной энергии упругой деформации U по обобщённой силе Pi
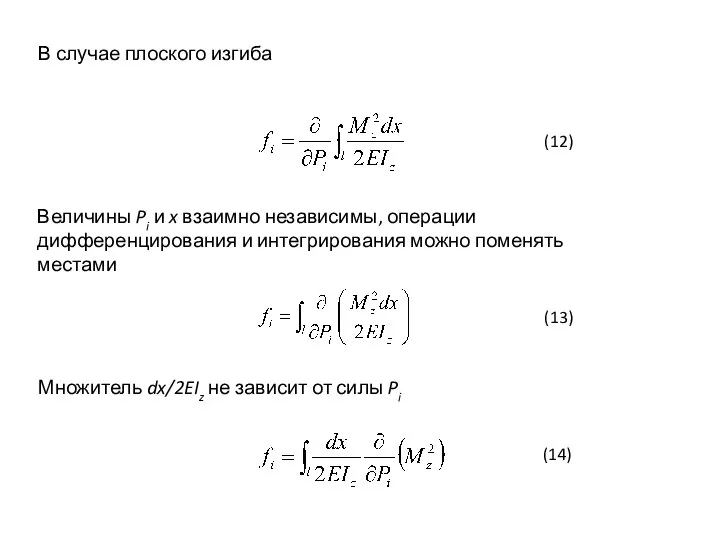
- 23. В случае плоского изгиба Величины Pi и x взаимно независимы, операции дифференцирования и интегрирования можно поменять
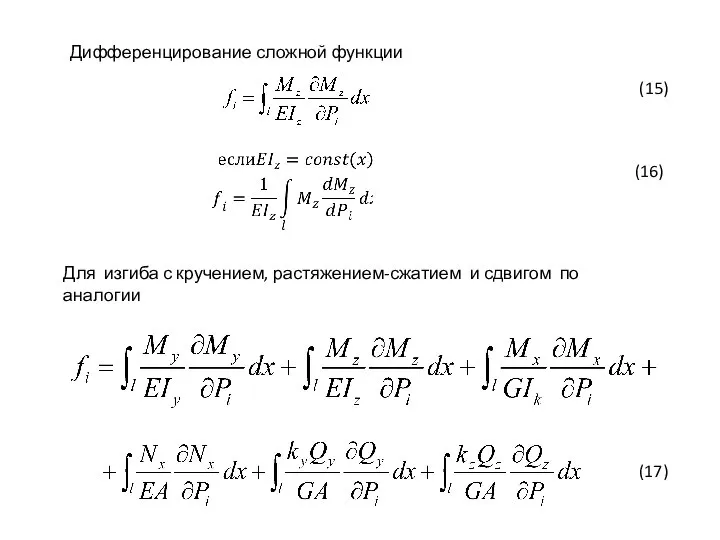
- 24. Дифференцирование сложной функции Для изгиба с кручением, растяжением-сжатием и сдвигом по аналогии (15) (16) (17)
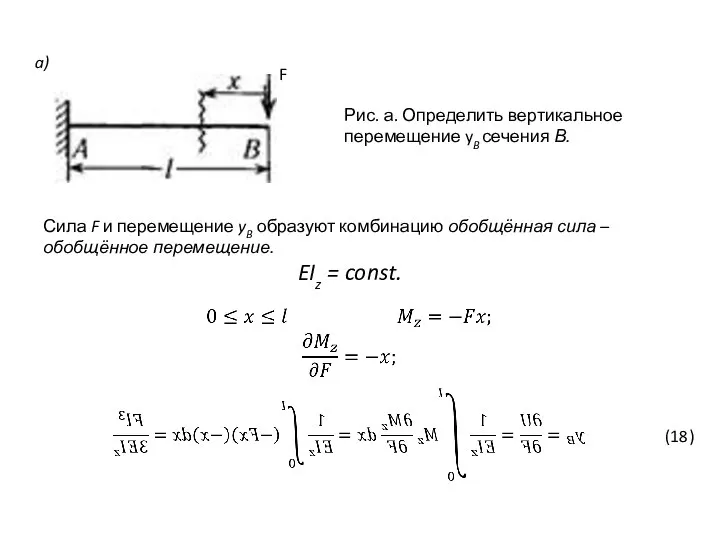
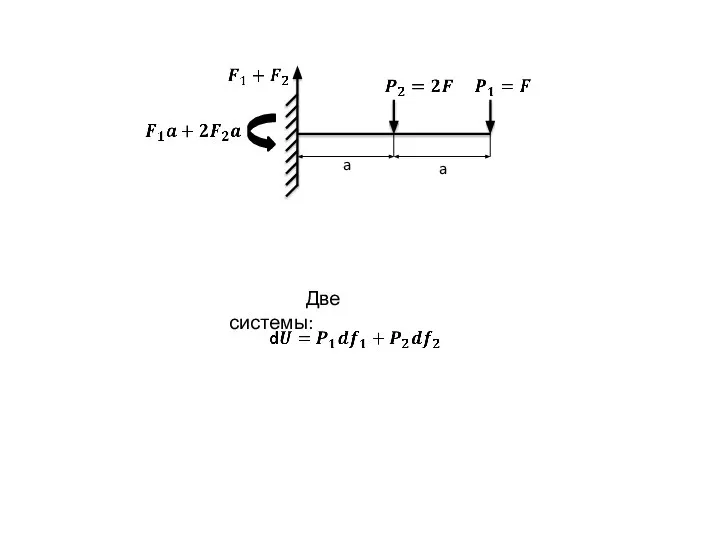
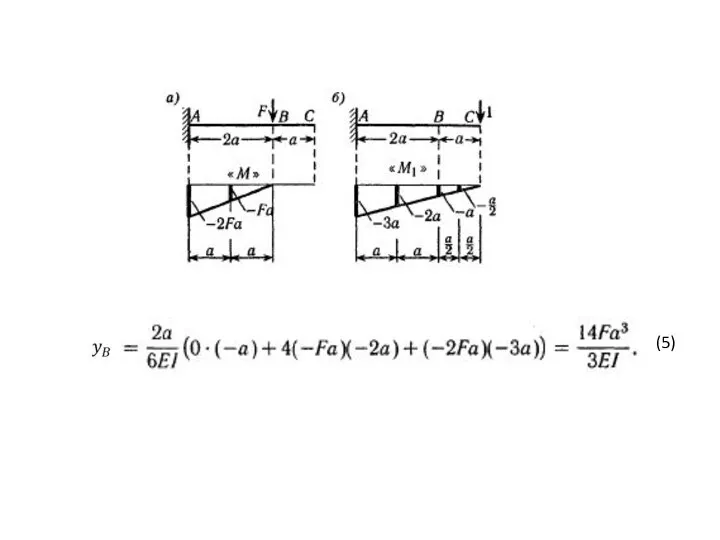
- 25. a) Рис. а. Определить вертикальное перемещение yB сечения В. Сила F и перемещение yB образуют комбинацию
- 26. a a
- 27. a a Две системы:
- 28. ++ _
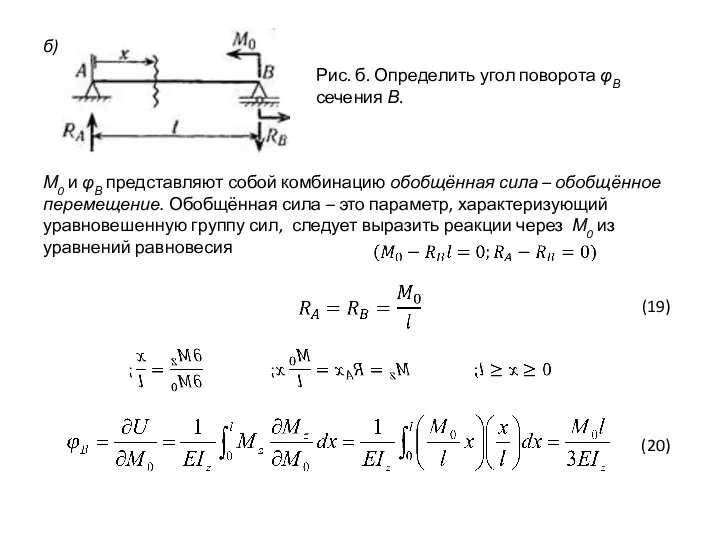
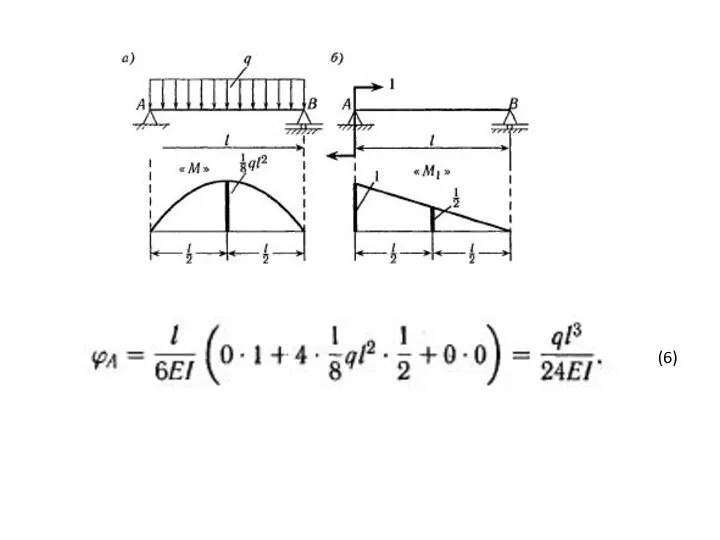
- 29. б) Рис. б. Определить угол поворота φВ сечения В. М0 и φВ представляют собой комбинацию обобщённая
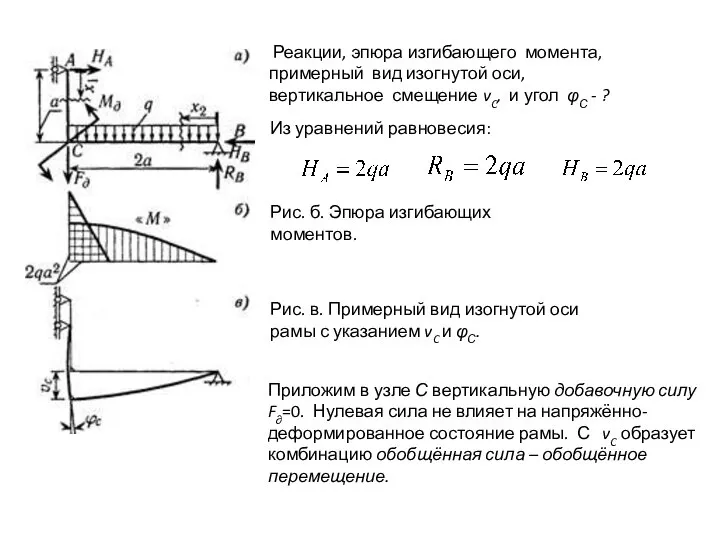
- 30. Реакции, эпюра изгибающего момента, примерный вид изогнутой оси, вертикальное смещение vC, и угол φС - ?
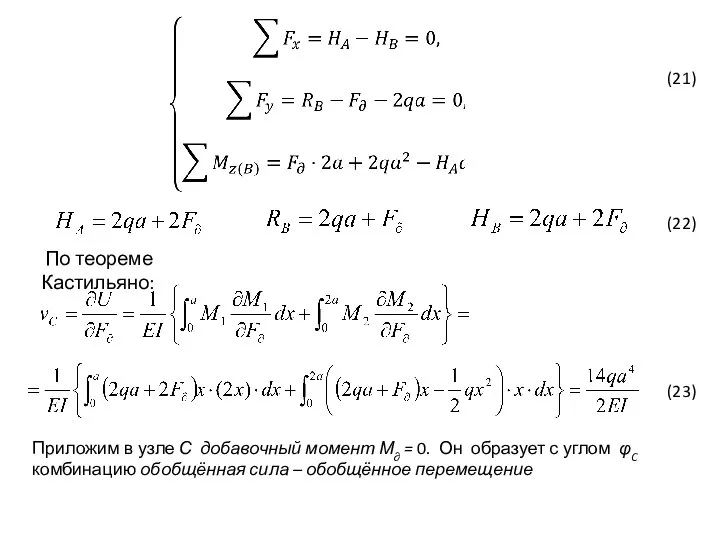
- 31. По теореме Кастильяно: Приложим в узле С добавочный момент М∂ = 0. Он образует с углом
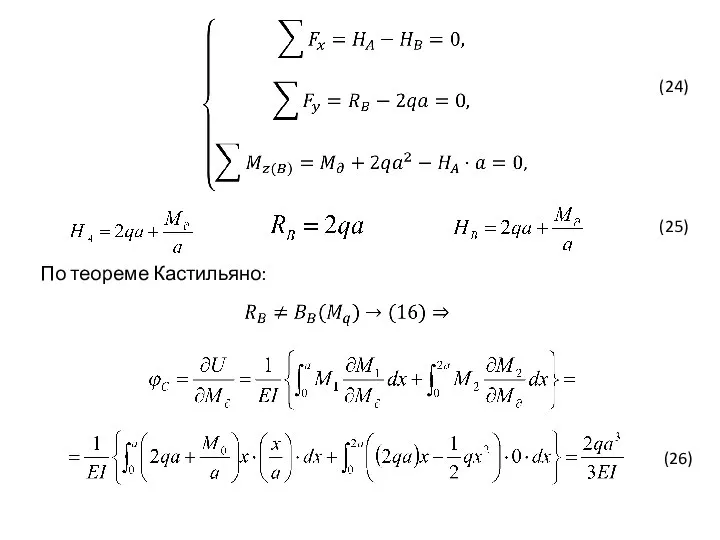
- 32. По теореме Кастильяно: (24) (25) (26)
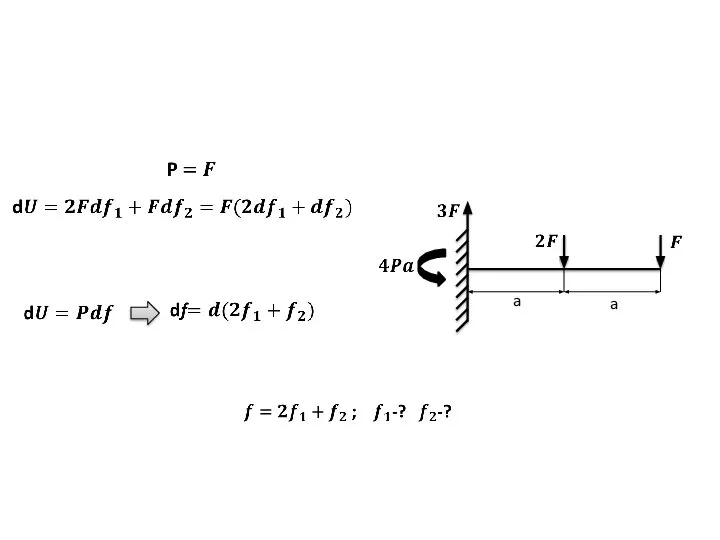
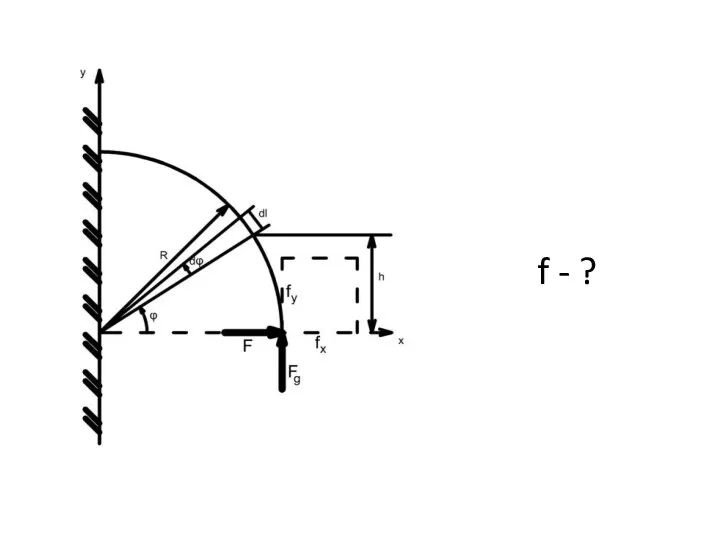
- 33. f - ?
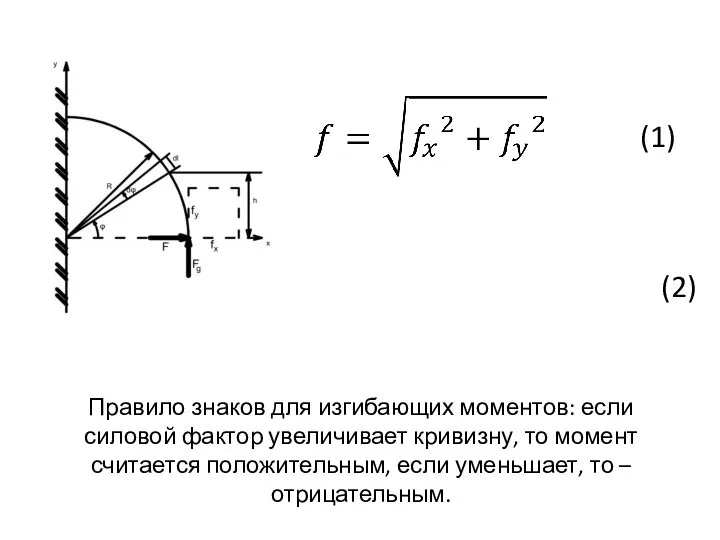
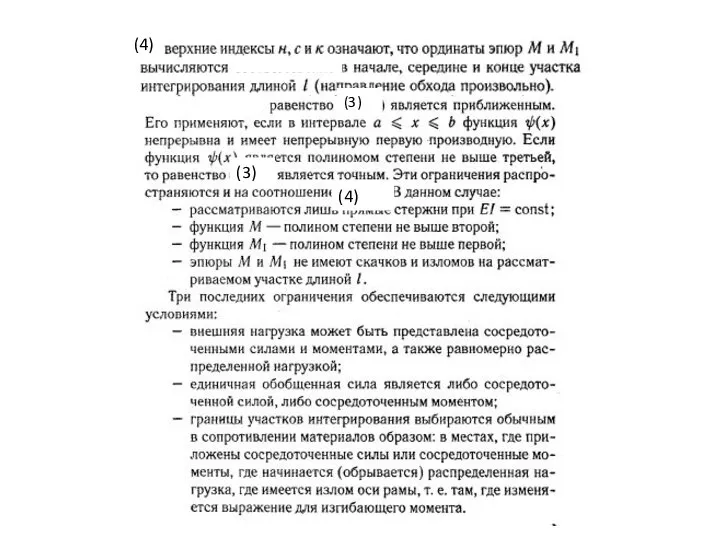
- 34. (1) (2) Правило знаков для изгибающих моментов: если силовой фактор увеличивает кривизну, то момент считается положительным,
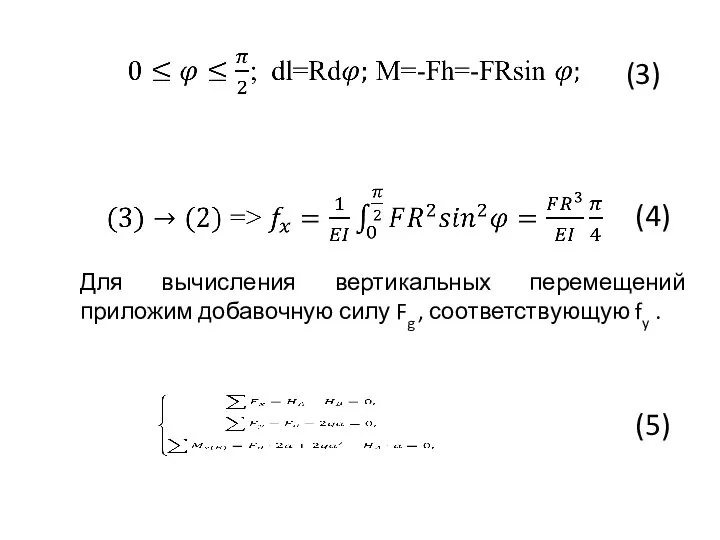
- 35. (3) Для вычисления вертикальных перемещений приложим добавочную силу Fg , соответствующую fy . (4) (5)
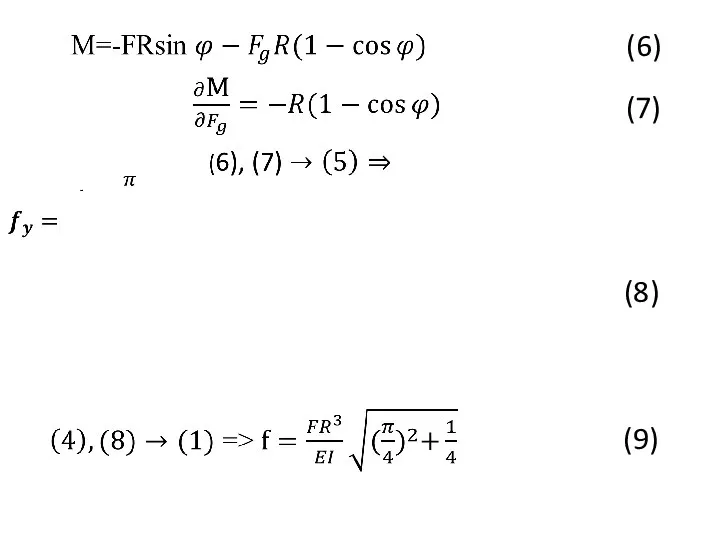
- 36. (8) (9) (6) (7)
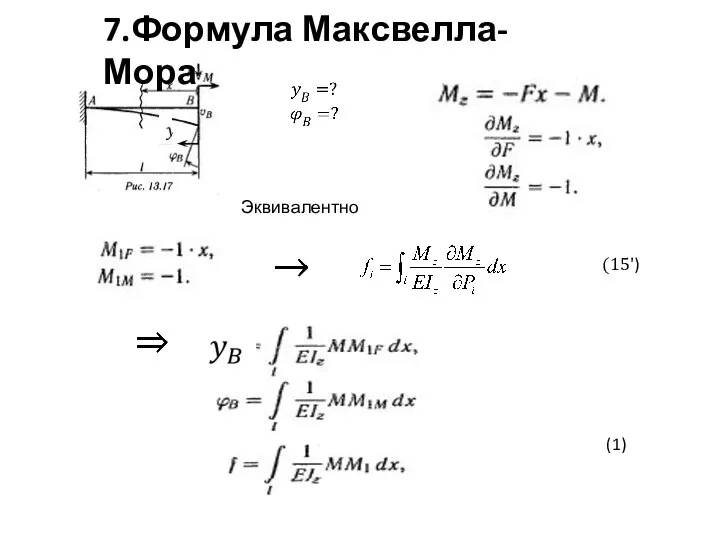
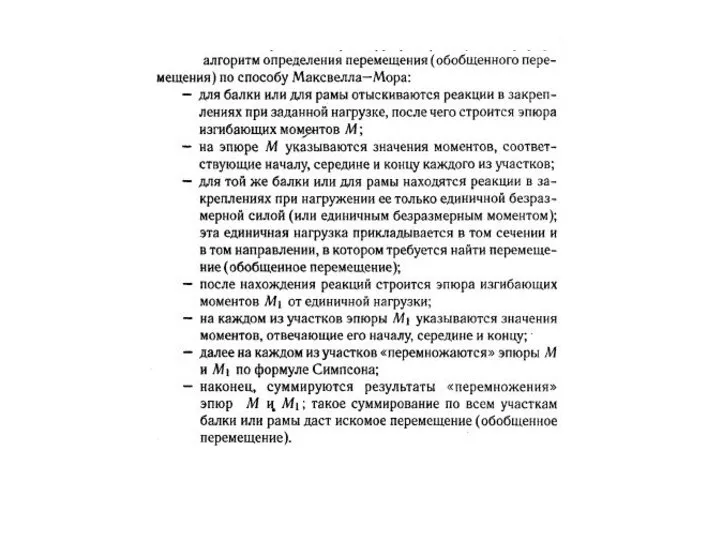
- 37. Эквивалентно (1) 7.Формула Максвелла-Мора (15')
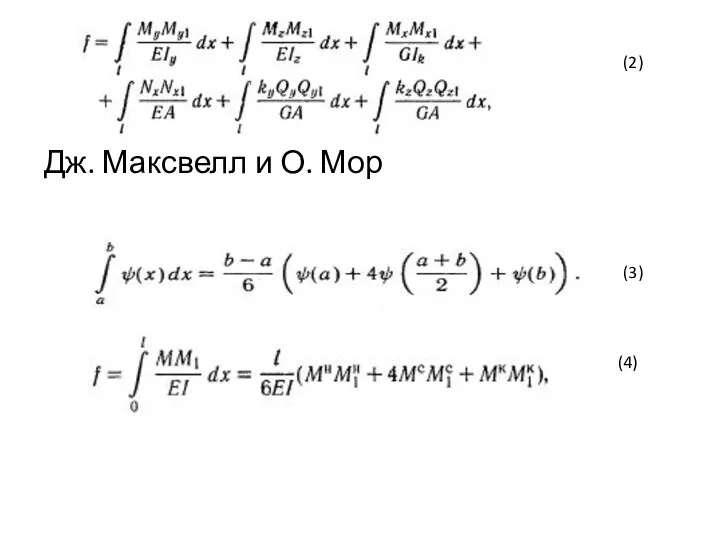
- 38. (2) Дж. Максвелл и О. Мор (3) (4)
- 39. 3 (4) (3) (4) (3) (3)
- 41. (5)
- 42. (6)
- 43. СПАСИБО ЗА ВНИМАНИЕ!
- 45. 2.ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ. ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ F Рис. а. Схема «больших» перемещений при изгибе стержня,
- 47. Скачать презентацию
Слайд 31.ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ УПРУГОЙ
ДЕФОРМАЦИИ СТЕРЖНЯ
1.1 РАСТЯЖЕНИЕ ( СЖАТИЕ ) СТЕРЖНЯ
1.ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ УПРУГОЙ
ДЕФОРМАЦИИ СТЕРЖНЯ
1.1 РАСТЯЖЕНИЕ ( СЖАТИЕ ) СТЕРЖНЯ
Слайд 4 1.2 КРУЧЕНИЕ СТЕРЖНЯ
а)
Аналогично (1)
(2)
1.3 ИЗГИБ
б)
1.3.1 ПЛОСКИЙ ЧИСТЫЙ
1.2 КРУЧЕНИЕ СТЕРЖНЯ
а)
Аналогично (1)
(2)
1.3 ИЗГИБ
б)
1.3.1 ПЛОСКИЙ ЧИСТЫЙ
Слайд 5 1.3.2 ПЛОСКИЙ ИЗГИБ
Mz(x) ≠ const.
Соотношение (3) применимо к участку
1.3.2 ПЛОСКИЙ ИЗГИБ
Mz(x) ≠ const.
Соотношение (3) применимо к участку

Слайд 6 2. ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ. ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ
ГЕОМЕТРИЧЕСКИ ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ
2. ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ. ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ
ГЕОМЕТРИЧЕСКИ ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ
Слайд 7Приложен момент М0
затем – сила F
(положение 1).
(положение
Приложен момент М0
затем – сила F
(положение 1).
(положение
Слайд 8 Коэффициенты податливости
,
,
,
.
При действии n обобщённых сил (закон Гука для перемещений)
Коэффициенты податливости
,
,
,
.
При действии n обобщённых сил (закон Гука для перемещений)
Слайд 9Работа внешних сил не зависит от порядка их приложения
(1)
(2)
Рис.1
3.ТЕОРЕМА КЛАЙПЕРОНА
Работа внешних сил не зависит от порядка их приложения
(1)
(2)
Рис.1
3.ТЕОРЕМА КЛАЙПЕРОНА
Слайд 10
(3)
(4)
Рис.2
(3)
(4)
Рис.2
Слайд 11
(5)
Рис.3
Рис.4
(5)
Рис.3
Рис.4
Слайд 12
(8)
(9)
(10)
(11)
(7)
(6)
(8)
(9)
(10)
(11)
(7)
(6)
Слайд 13
(12)
Теорема Клайперона
(13)
Потенциальная энергия линейной упруго-деформируемой системы равна половине суммы произведений обобщенных сил
(12)
Теорема Клайперона
(13)
Потенциальная энергия линейной упруго-деформируемой системы равна половине суммы произведений обобщенных сил
Слайд 14(1)
(2)
(3)
(4)
(5)
y
(6)
Пример Р характеризует систему взаимно уравновешенных сил:
(7)
4.Обобщенные силы и обобщенные перемещения
y
(1)
(2)
(3)
(4)
(5)
y
(6)
Пример Р характеризует систему взаимно уравновешенных сил:
(7)
4.Обобщенные силы и обобщенные перемещения
y
Слайд 15В качестве обобщенной силы может быть принят любой параметр, характеризующий уравновешенную группу
В качестве обобщенной силы может быть принят любой параметр, характеризующий уравновешенную группу
Слайд 16(8)
(9)
(10)
(11)
(12)
(8)
(9)
(10)
(11)
(12)
Слайд 17
Если
(1)
(2)
(3)
(4)
(5)
(6)
5.ТЕОРЕМА ЛАГРАНЖА
Если
(1)
(2)
(3)
(4)
(5)
(6)
5.ТЕОРЕМА ЛАГРАНЖА
Слайд 18(7)
(8)
(9)
Теорема Л. Лагранжа:
Обобщенная сила равна частной производной от потенциальной энергии упругой деформации
(7)
(8)
(9)
Теорема Л. Лагранжа:
Обобщенная сила равна частной производной от потенциальной энергии упругой деформации
Слайд 19ТЕОРЕМА КАСТИЛЬЯНО
.
Вертикальная заштрихованная полоса иллюстрирует приращения работы (приращения потенциальной энергии)
Работа (потенциальная
ТЕОРЕМА КАСТИЛЬЯНО
.
Вертикальная заштрихованная полоса иллюстрирует приращения работы (приращения потенциальной энергии)
Работа (потенциальная
Слайд 20Вводится понятие приращения дополнительной работы (дополнительной энергии)
горизонтальная заштрихованная полоса ( рис.
Вводится понятие приращения дополнительной работы (дополнительной энергии)
горизонтальная заштрихованная полоса ( рис.
Слайд 21 Если на упругую систему действуют n сил, то полный дифференциал дополнительной
Если на упругую систему действуют n сил, то полный дифференциал дополнительной
Слайд 22Для линейных систем
.
Частная производная от потенциальной энергии упругой деформации U по
Для линейных систем
.
Частная производная от потенциальной энергии упругой деформации U по
Слайд 23В случае плоского изгиба
Величины Pi и x взаимно независимы, операции дифференцирования
В случае плоского изгиба
Величины Pi и x взаимно независимы, операции дифференцирования
Слайд 24 Дифференцирование сложной функции
Для изгиба с кручением, растяжением-сжатием и сдвигом по
Дифференцирование сложной функции
Для изгиба с кручением, растяжением-сжатием и сдвигом по
Слайд 25a)
Рис. а. Определить вертикальное перемещение yB сечения В.
Сила F и перемещение yB
a)
Рис. а. Определить вертикальное перемещение yB сечения В.
Сила F и перемещение yB
Слайд 26
a
a
a
a
Слайд 27
a
a
Две системы:
a
a
Две системы:
Слайд 28
++
_
++
_
Слайд 29б)
Рис. б. Определить угол поворота φВ сечения В.
М0 и φВ представляют
б)
Рис. б. Определить угол поворота φВ сечения В.
М0 и φВ представляют
Слайд 30 Реакции, эпюра изгибающего момента, примерный вид изогнутой оси, вертикальное смещение vC,
Реакции, эпюра изгибающего момента, примерный вид изогнутой оси, вертикальное смещение vC,
Слайд 31 По теореме Кастильяно:
Приложим в узле С добавочный момент М∂ = 0.
По теореме Кастильяно:
Приложим в узле С добавочный момент М∂ = 0.
Слайд 32 По теореме Кастильяно:
(24)
(25)
(26)
По теореме Кастильяно:
(24)
(25)
(26)
Слайд 33f - ?
f - ?
Слайд 34
(1)
(2)
Правило знаков для изгибающих моментов: если силовой фактор увеличивает кривизну, то момент
(1)
(2)
Правило знаков для изгибающих моментов: если силовой фактор увеличивает кривизну, то момент
Слайд 35
(3)
Для вычисления вертикальных перемещений приложим добавочную силу Fg , соответствующую fy .
(4)
(5)
(3)
Для вычисления вертикальных перемещений приложим добавочную силу Fg , соответствующую fy .
(4)
(5)
Слайд 36
(8)
(9)
(6)
(7)
(8)
(9)
(6)
(7)
Слайд 37
Эквивалентно
(1)
7.Формула Максвелла-Мора
(15')
Эквивалентно
(1)
7.Формула Максвелла-Мора
(15')
Слайд 38(2)
Дж. Максвелл и О. Мор
(3)
(4)
(2)
Дж. Максвелл и О. Мор
(3)
(4)
Слайд 393
(4)
(3)
(4)
(3)
(3)
3
(4)
(3)
(4)
(3)
(3)
Слайд 41(5)
(5)
Слайд 42(6)
(6)
Слайд 43СПАСИБО ЗА ВНИМАНИЕ!
СПАСИБО ЗА ВНИМАНИЕ!
Слайд 45 2.ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ.
ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ
F
Рис. а. Схема «больших»
2.ЛИНЕЙНО УПРУГИЕ СИСТЕМЫ.
ЗАКОН ГУКА ДЛЯ ПЕРЕМЕЩЕНИЙ
F
Рис. а. Схема «больших»
 Презентация на тему Своя игра по физике
Презентация на тему Своя игра по физике  Газораспределительный механизм (ГРМ). Назначение, диагностика и обслуживание
Газораспределительный механизм (ГРМ). Назначение, диагностика и обслуживание Свободные и вынужденные электромагнитные колебания. Колебательный контур. Переменный ток
Свободные и вынужденные электромагнитные колебания. Колебательный контур. Переменный ток Методы исследование структуры. Часть 1
Методы исследование структуры. Часть 1 Физика
Физика Паралельне з’єднання провідників. Урок 51
Паралельне з’єднання провідників. Урок 51 Презентация на тему Механические волны
Презентация на тему Механические волны  Магнитное поле тока
Магнитное поле тока Характеристики электромагнитных реле постоянного тока. Лекция 7 (2)
Характеристики электромагнитных реле постоянного тока. Лекция 7 (2) Презентация на тему Путешествие на остров Эврика
Презентация на тему Путешествие на остров Эврика  Электрический ток в металлах
Электрический ток в металлах Основы медицинской и биологической физики. Лекция 4. Часть 1
Основы медицинской и биологической физики. Лекция 4. Часть 1 Разработка методических указаний и постановка лабораторных работ. Силовая электроника
Разработка методических указаний и постановка лабораторных работ. Силовая электроника Тепловые двигатели
Тепловые двигатели Тонкостенные сферические сосуды и трубы
Тонкостенные сферические сосуды и трубы Магнитное поле
Магнитное поле Крупнейшие современные телескопы
Крупнейшие современные телескопы 6
6 Деятельность и достижения Галилео Галилея в механике
Деятельность и достижения Галилео Галилея в механике Плавание тел. Воздухоплавание
Плавание тел. Воздухоплавание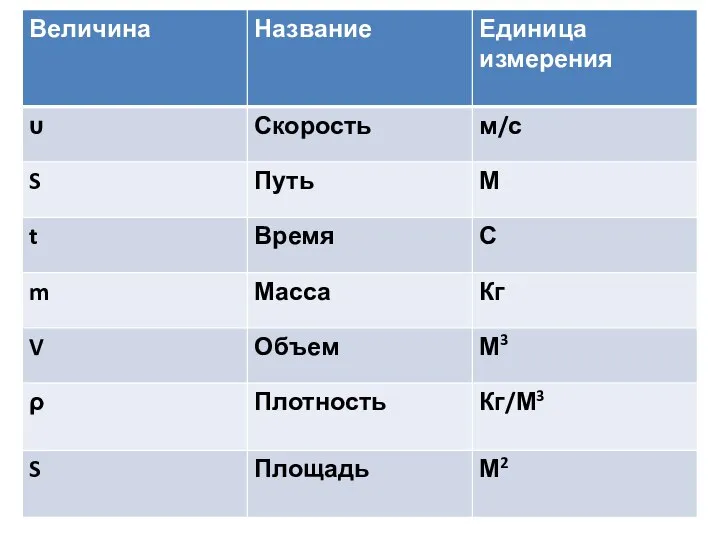 Формулы и величины
Формулы и величины 4 (1)
4 (1) Табличные величины см. таблицы сборника задач для 8 класса автор Генденштейн
Табличные величины см. таблицы сборника задач для 8 класса автор Генденштейн Сборка регулировка и испытание системы зажигания двигателей
Сборка регулировка и испытание системы зажигания двигателей Сила пара
Сила пара Летняя школа Физика-экспериментатора
Летняя школа Физика-экспериментатора Основное отличие химических явлений от физических?
Основное отличие химических явлений от физических? Физическая викторина. Игра
Физическая викторина. Игра