- ИГЭС2 семестр Колебания лекция 1

Содержание
- 2. ЛЕКЦИЯ 1 ФИЗИКА КОЛЕБАНИЙ *
- 3. *
- 4. * Механические колебания Колебательные процессы весьма часто встречаются в окружающей нас природе и технике. Значительная часть
- 5. *
- 6. Колебания (колебательные движения)- изменения состояния, обладающие той или иной степенью повторяемости во времени. КОЛЕБАНИЯ Колебания могут
- 7. По характеру физических процессов: Электромагнитные колебания переменного электрического поля в цепи, колебания векторов Е и В
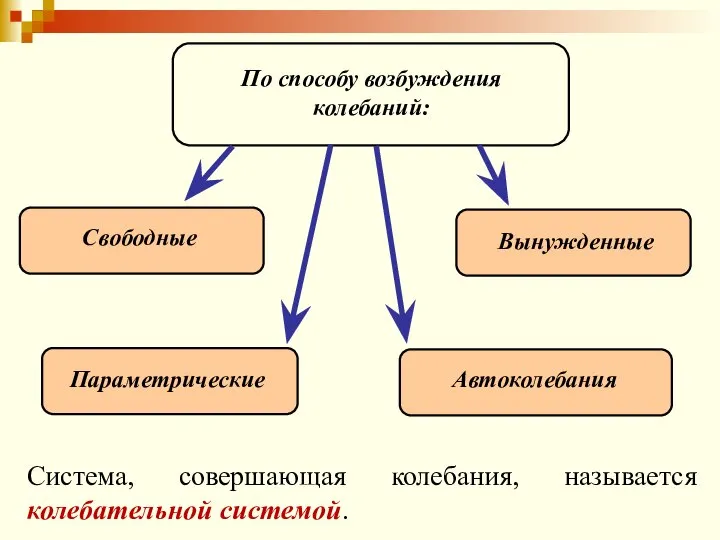
- 8. По способу возбуждения колебаний: Свободные Вынужденные Параметрические Автоколебания Система, совершающая колебания, называется колебательной системой.
- 9. Свободные (или собственные) — это колебания в системе не подверженных действию переменных внешних сил, под действием
- 10. Условия возникновения свободных колебаний 1. Колебательная система должна иметь положение устойчивого равновесия. 2. При выведении системы
- 11. * Параметрические — колебания, возникаю-щие при изменении какого-либо параметра колебательной системы в результате внешнего воздействия. Вынужденные
- 12. * Автоколебания — колебания, при которых система имеет запас потенциальной энергии, расходующейся на совершение колебаний (пример
- 13. * Колебания - периодические, если значения физических величин, изменяющихся в процессе колебаний, повторяются через равные промежутки
- 14. Периодические процессы можно представить как наложение гармонических колебаний. Фурье установил, что любое периодическое негармоническое колебание может
- 15. * Гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по закону синуса или
- 16. * Простейшей моделью гармонического колебания является колебание проекции x конца радиуса-вектора r точки, движущейся по окружности
- 17. Угол поворота изменяется по закону равномерного вращения: φ = w0t + a. Проекция же конца радиуса-вектора
- 18. Если некоторая материальная точка совершает гармоническое колебательное движение около положения равновесия вдоль некоторой оси x (гармонический
- 19. Характеристики колебательного движения 1. Амплитуда 2. Период 3. Частота *
- 20. Период колебаний - (Т) наименьший промежуток времени, через который повторяются значения всех физических величин, характеризующих колебательное
- 21. * Амплитуда - Наибольшее (по модулю) отклонение колеблющегося тела от положения равновесия Циклическая ( круговая частота)
- 22. Механические гармонические колебания Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется по закону
- 23. Если в начальный момент времени тело проходит положение равновесия, то колебания являются синусоидальными. Рассмотрим прямолинейные гармоничес-кие
- 24. Кинематика колебаний Циклическая частота связана с линейной частотой и периодом следующими соотношениями *
- 25. Скорость колеблющейся точки меняется по закону:
- 26. Ускорение:
- 27. *
- 28. Сила, вызывающая колебания, обладает следующими свойствами 2. модуль силы пропорционален смещению материальной точки из положения равновесия;
- 29. Такие силы называют возвращающими. Зависимость характерна для упругой силы. F = -kx Следовательно, сила всегда направлена
- 30. *
- 31. ЭНЕРГИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ Кинетическая энергия материальной точки, совершающей гармонические колебания:
- 32. Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F:
- 33. Полная энергия: где
- 34. *
- 35. Гармонический осциллятор Осциллятор – система, совершающая свободные колебания. Классический осциллятор – механическая система, совершающая колебания около
- 36. Дифференциальное уравнение гармонического осциллятора Решение этого уравнения: Здесь x – колеблющаяся величина.
- 37. Маятники Маятник- тело, совершающее колебания относительно положения равновесия под действием приложенных к нему сил. Пружинный маятник
- 38. Пружинный маятник это закреплённый на пружине груз, способный совершать колебания в вертикальном или горизонтальном или направлении.
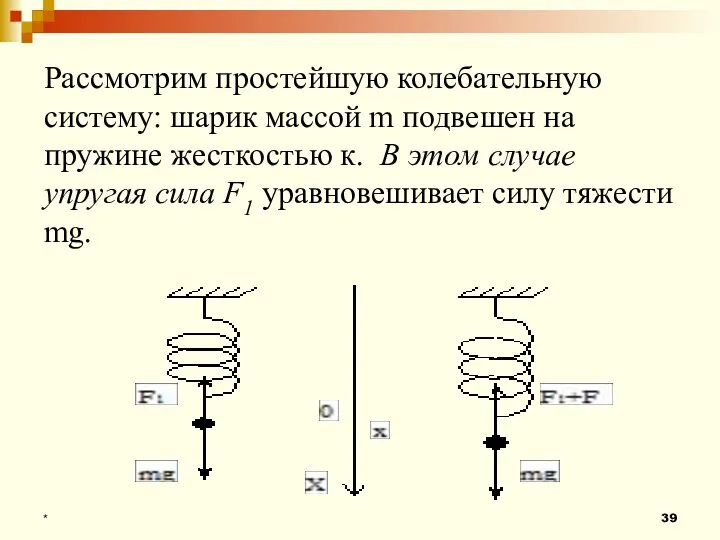
- 39. * Рассмотрим простейшую колебательную систему: шарик массой m подвешен на пружине жесткостью к. В этом случае
- 40. * Изменение упругой силы по закону Гука пропорционально изменению длины пружины или смещению шарика х: F=-kx,(1)
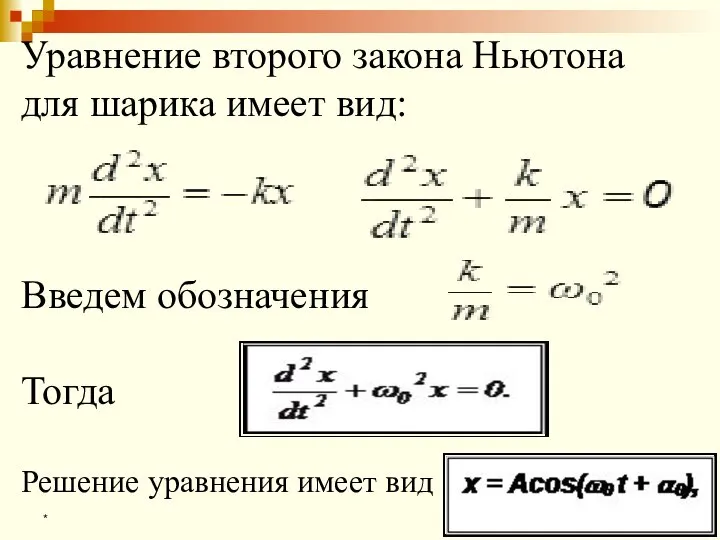
- 41. * Уравнение второго закона Ньютона для шарика имеет вид: Введем обозначения Тогда Решение уравнения имеет вид
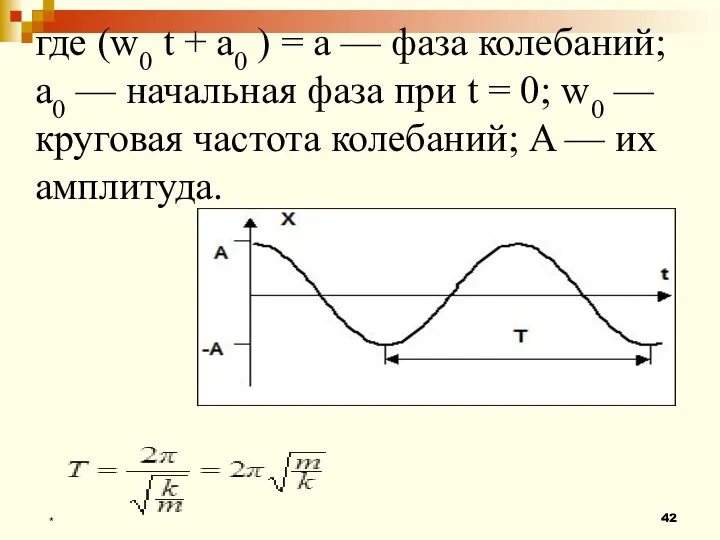
- 42. * где (w0 t + a0 ) = a — фаза колебаний; a0 — начальная фаза
- 43. Решив данное уравнение, получим, что пружинный маятник совершает гармонические колебания по закону x = A cos(ω0t
- 44. * В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона
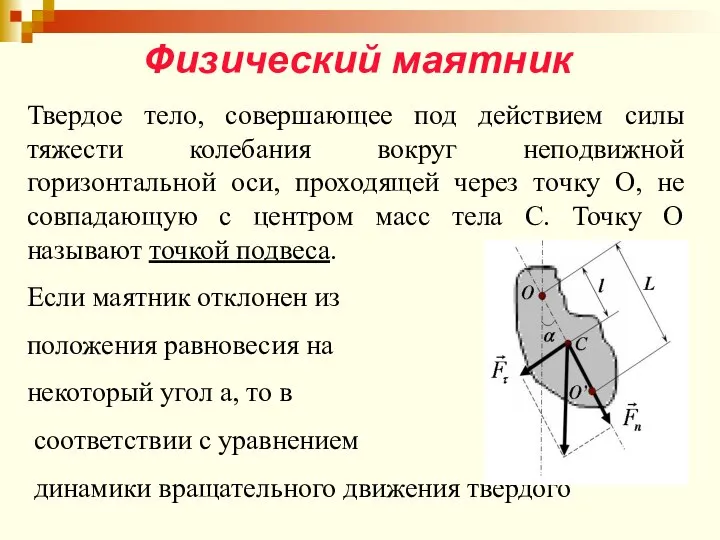
- 45. Физический маятник Твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, проходящей через
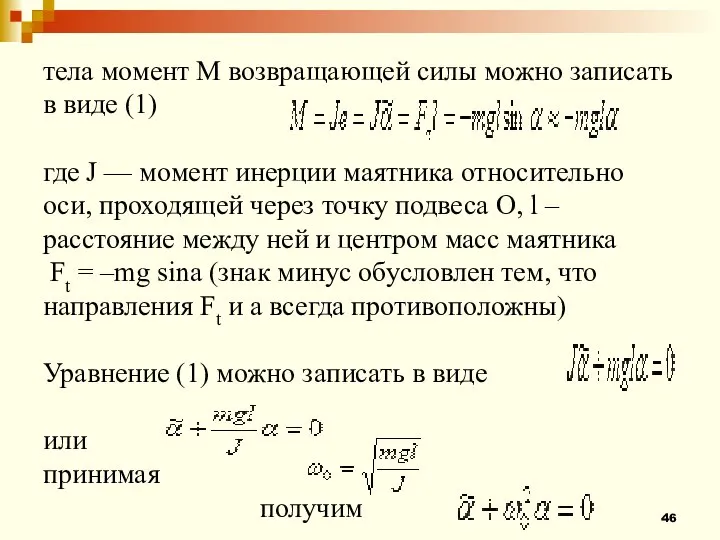
- 46. тела момент M возвращающей силы можно записать в виде (1) где J — момент инерции маятника
- 47. * решение которого : При малых колебаниях физический маятник совершает гармонические колебания с периодом где L=J/(ml)
- 48. J – момент инерции маятника относительно оси, проходящей через точку подвеса. Приведенная длина физического маятника –
- 49. * Применяя теорему Штейнера, получим т. е. ОО' всегда больше ОС. Точка подвеса О маятника и
- 50. Математический маятник Идеализированная система, состоящая из материальной точки массой m, подвешенной на невесомой нерастяжимой нити (масса
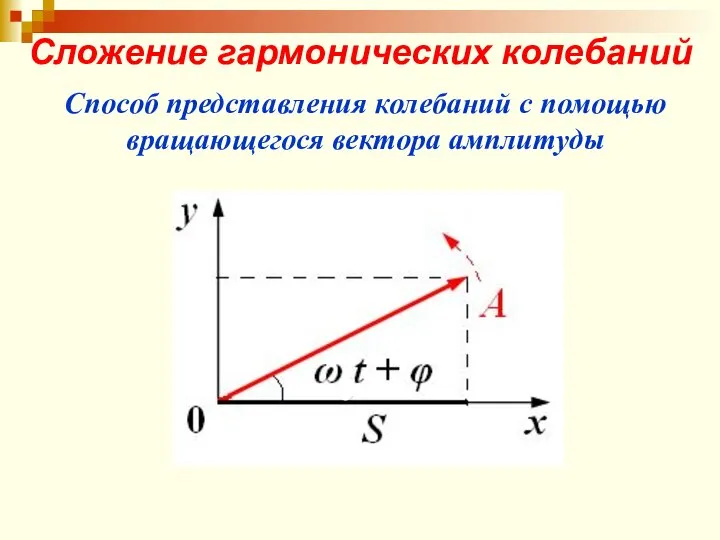
- 51. Сложение гармонических колебаний Способ представления колебаний с помощью вращающегося вектора амплитуды
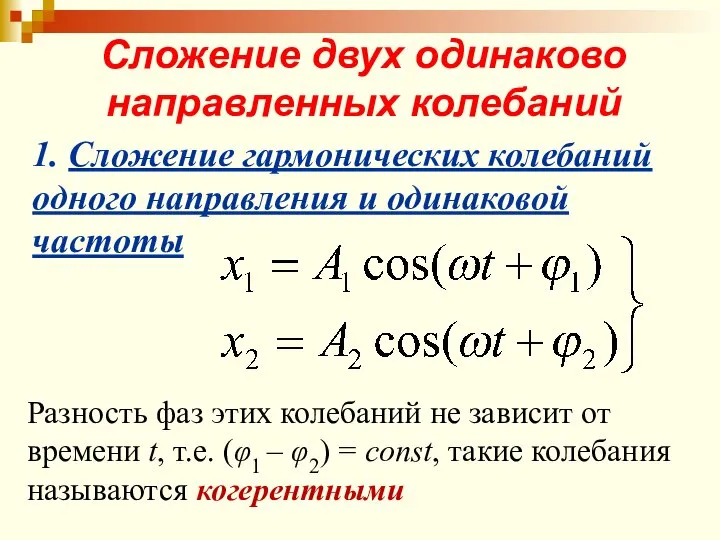
- 52. Сложение двух одинаково направленных колебаний 1. Сложение гармонических колебаний одного направления и одинаковой частоты Разность фаз
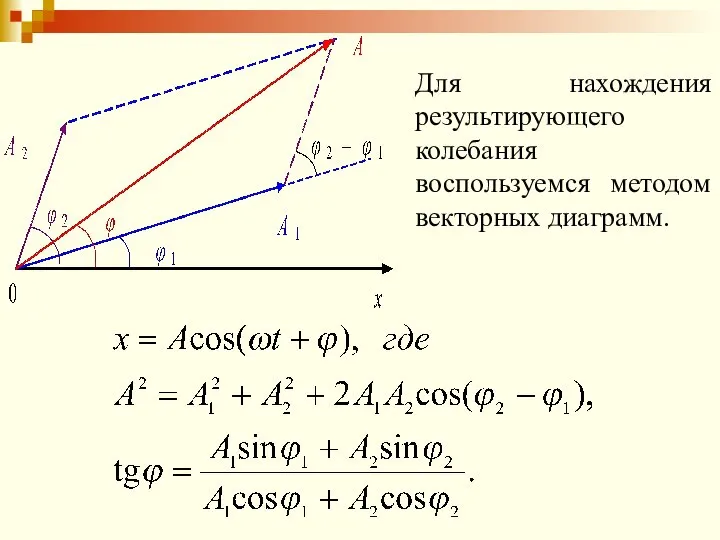
- 53. Для нахождения результирующего колебания воспользуемся методом векторных диаграмм.
- 54. Если колебания синфазны: φ2 – φ1 = ±2mπ, следовательно, А = А1 + А2, происходит усиление
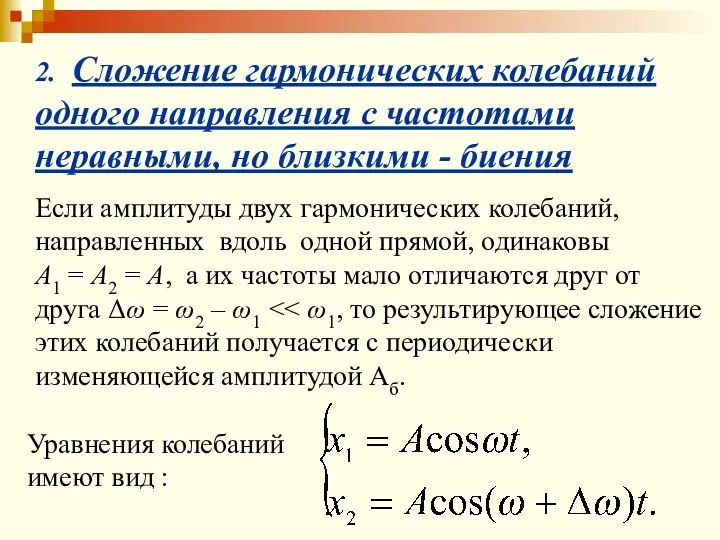
- 55. 2. Сложение гармонических колебаний одного направления с частотами неравными, но близкими - биения Если амплитуды двух
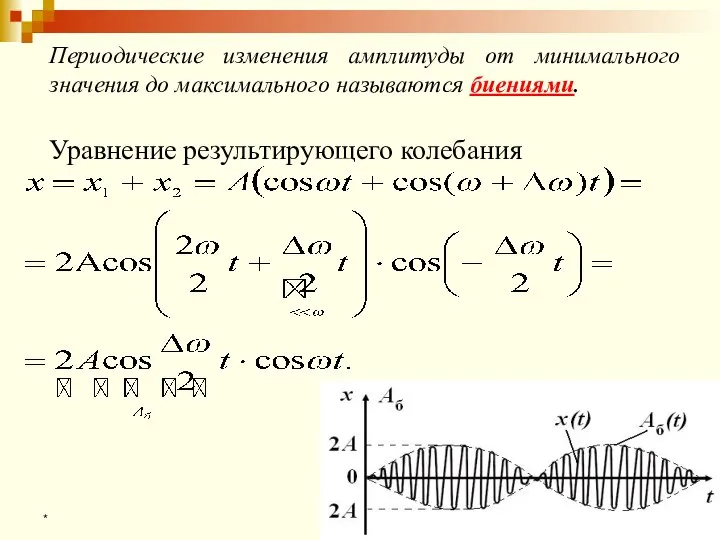
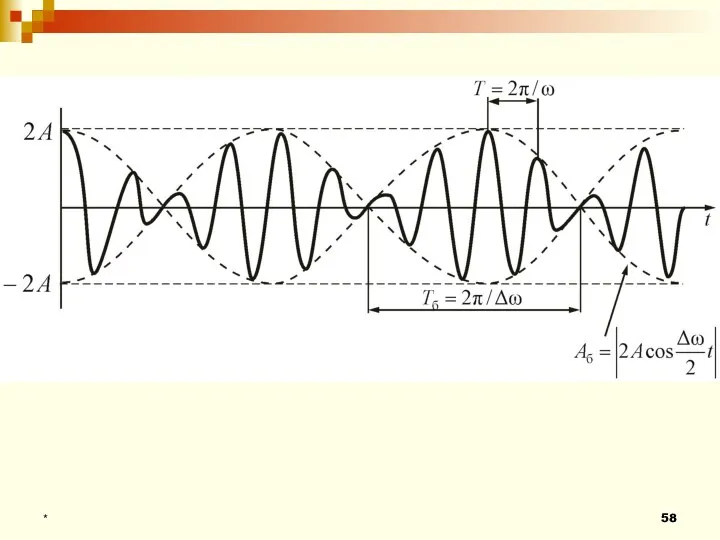
- 56. * Периодические изменения амплитуды от минимального значения до максимального называются биениями. Уравнение результирующего колебания
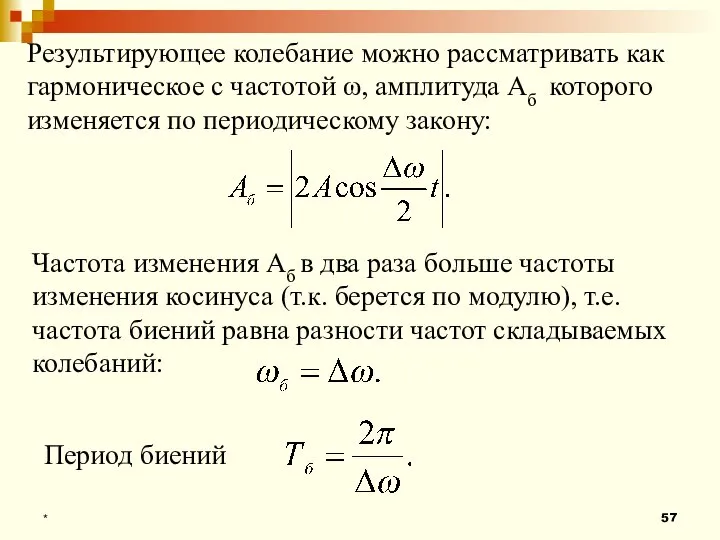
- 57. * Результирующее колебание можно рассматривать как гармоническое с частотой ω, амплитуда Аб которого изменяется по периодическому
- 58. *
- 60. Гармонические колебания совпадают по направлению и имеют кратные циклические частоты ω, 2ω, 3ω и т.д. В
- 61. * Такое представление периодической функции f(t) называется разложением функции в ряд Фурье или гармоническим анализом сложного
- 62. 3. Сложение взаимно перпендикулярных колебаний Сложение колебаний с одинаковыми частотами (ω1 :ω2=1:1 ) Пусть точка одновременно
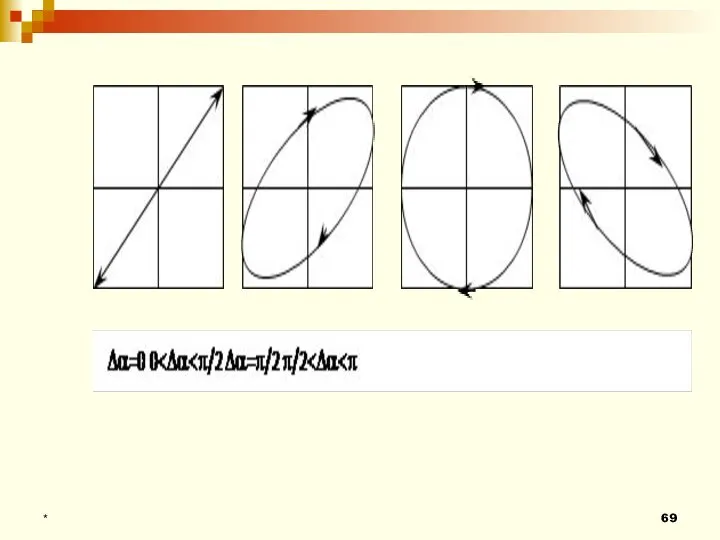
- 63. Рассмотрим несколько частных случаев: 1) Фазы колебаний равны. x = A1 sin ωt; y = A2
- 64. Такие колебания называют линейно-поляризованными.
- 65. 2) Разность фаз равна π. x = A1 sin (ωt + π) = - A1 sin
- 66. В обоих случаях амплитуда результирующего колебания равна:
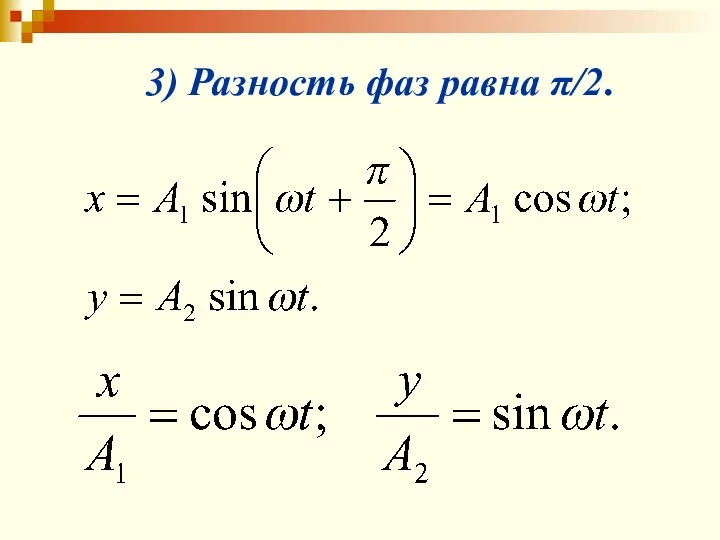
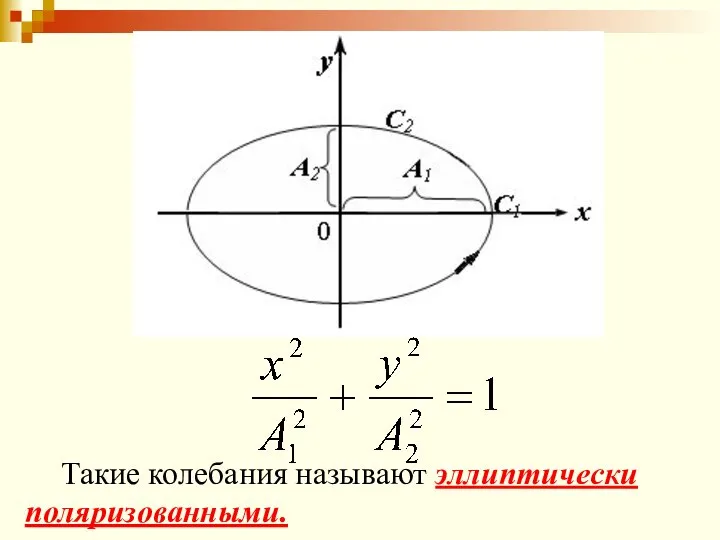
- 67. 3) Разность фаз равна π/2.
- 68. Такие колебания называют эллиптически поляризованными.
- 69. *
- 70. Если частоты складываемых колебаний относятся друг к другу как целые числа, то траектория результирующего движения оказывается
- 71. *
- 72. По виду фигур можно определить неизвестную частоту по известной, или определить отношение частот складываемых колебаний. Отношение
- 73. * Фигуры Лиссажу при
- 74. Затухающие колебания Затухающие колебания – колебания, амплитуда которых из-за потерь энергии реальной колебательной системой с течением
- 75. Закон затухания колебаний определяется свойствами колебательных систем. Обычно рассматриваются линейные системы – идеализированные реальные системы, в
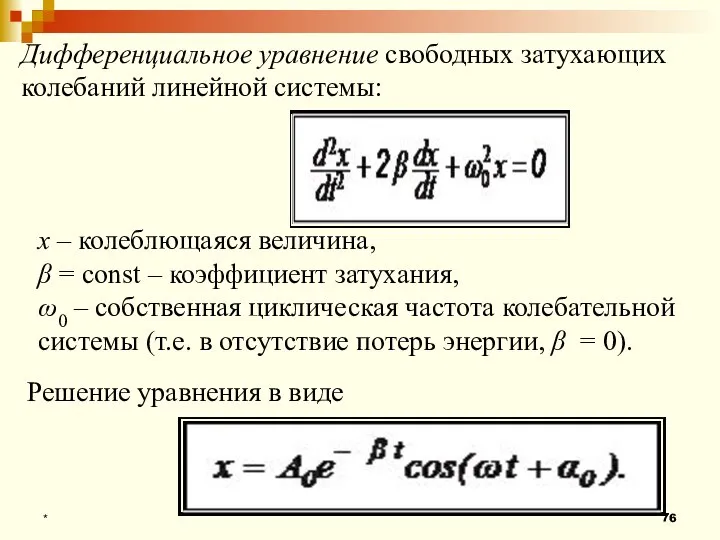
- 76. * Дифференциальное уравнение свободных затухающих колебаний линейной системы: х – колеблющаяся величина, β = const –
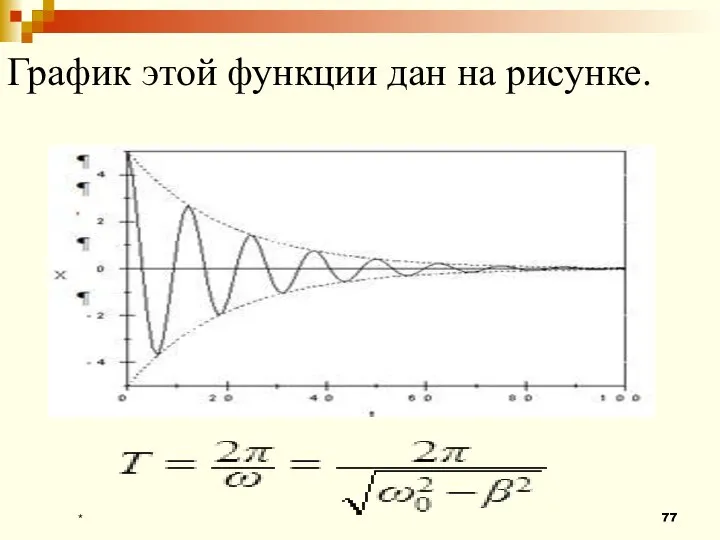
- 77. * График этой функции дан на рисунке.
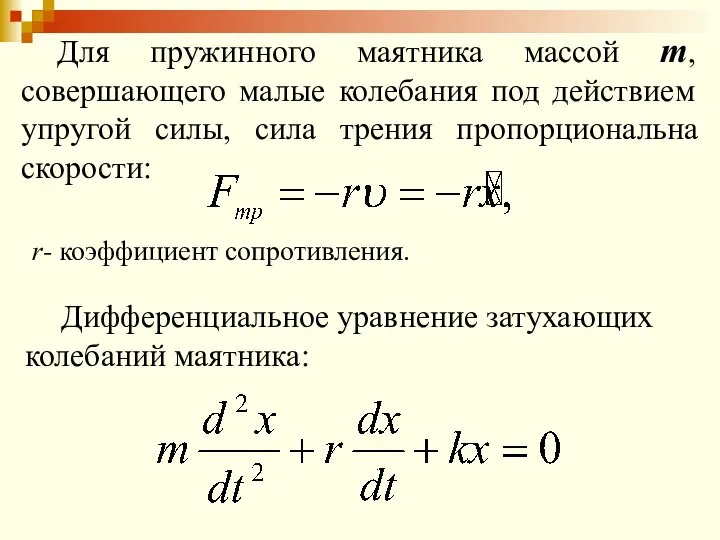
- 78. Для пружинного маятника массой m, совершающего малые колебания под действием упругой силы, сила трения пропорциональна скорости:
- 79. Амплитуда затухающих колебаний: Это отношение называют декрементом затухания . В качестве меры затухания часто берут величину
- 80. Затухающее колебание не является периодическим, и тем более гармоническим.
- 81. Вынужденные колебания Вынужденные колебания – незатухающие колебания, возникающие под действием периодической силы, изменяющейся по гармоническому закону:
- 82. Для простейшего пружинного маятника, на который действует внешняя сила Дифференциальное уравнение вынужденных колебаний маятника: :
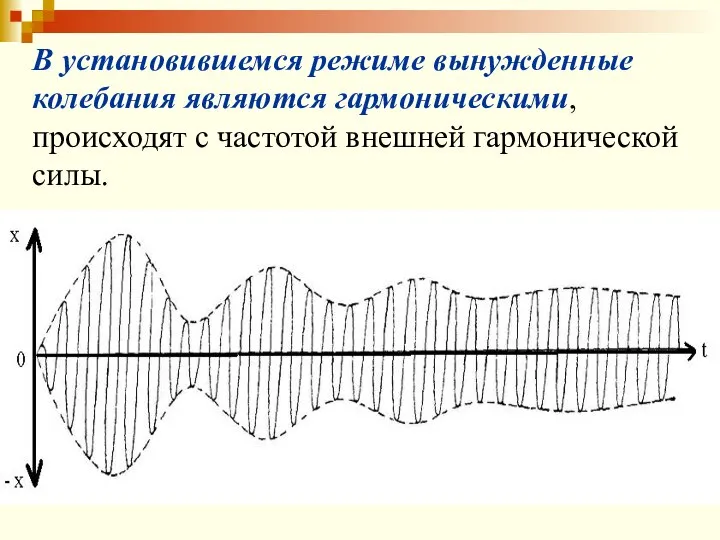
- 83. В установившемся режиме вынужденные колебания являются гармоническими, происходят с частотой внешней гармонической силы.
- 84. В случае установившихся колебаний при некоторой частоте внешней силы – резонансной частоте ωрез – амплитуда смещения
- 86. Скачать презентацию
Слайд 4*
Механические колебания
Колебательные процессы весьма часто встречаются в окружающей нас природе и технике.
*
Механические колебания
Колебательные процессы весьма часто встречаются в окружающей нас природе и технике.
Слайд 6Колебания (колебательные движения)- изменения состояния, обладающие той или иной степенью повторяемости во
Колебания (колебательные движения)- изменения состояния, обладающие той или иной степенью повторяемости во
Слайд 7По характеру физических процессов:
Электромагнитные
колебания переменного электрического поля в цепи, колебания векторов Е
По характеру физических процессов:
Электромагнитные
колебания переменного электрического поля в цепи, колебания векторов Е

Слайд 8По способу возбуждения колебаний:
Свободные
Вынужденные
Параметрические
Автоколебания
Система, совершающая колебания, называется колебательной системой.
По способу возбуждения колебаний:
Свободные
Вынужденные
Параметрические
Автоколебания
Система, совершающая колебания, называется колебательной системой.
Слайд 9Свободные (или собственные) — это колебания в системе не подверженных действию переменных внешних
Свободные (или собственные) — это колебания в системе не подверженных действию переменных внешних
Слайд 10
Условия возникновения свободных колебаний
1. Колебательная система должна иметь положение устойчивого равновесия.
2. При
Условия возникновения свободных колебаний 1. Колебательная система должна иметь положение устойчивого равновесия. 2. При
Слайд 11*
Параметрические — колебания, возникаю-щие при изменении какого-либо параметра колебательной системы в результате внешнего
*
Параметрические — колебания, возникаю-щие при изменении какого-либо параметра колебательной системы в результате внешнего
Слайд 12*
Автоколебания — колебания, при которых система имеет запас потенциальной энергии, расходующейся на совершение колебаний
*
Автоколебания — колебания, при которых система имеет запас потенциальной энергии, расходующейся на совершение колебаний
Слайд 13*
Колебания - периодические, если значения физических величин, изменяющихся в процессе колебаний, повторяются
*
Колебания - периодические, если значения физических величин, изменяющихся в процессе колебаний, повторяются
Слайд 14Периодические процессы можно представить как наложение гармонических колебаний.
Фурье установил, что любое периодическое
Периодические процессы можно представить как наложение гармонических колебаний.
Фурье установил, что любое периодическое
Слайд 15*
Гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по
*
Гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по
Слайд 16*
Простейшей моделью гармонического колебания является колебание проекции x конца радиуса-вектора r точки,
*
Простейшей моделью гармонического колебания является колебание проекции x конца радиуса-вектора r точки,
Слайд 17
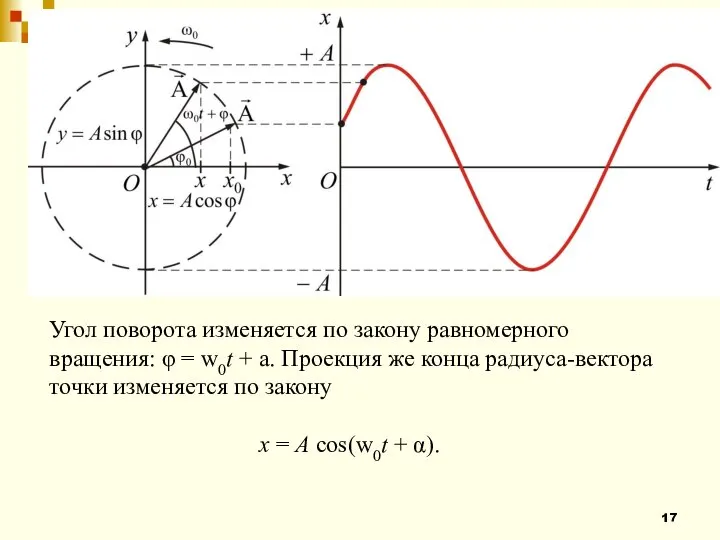
Угол поворота изменяется по закону равномерного вращения: φ = w0t + a.
Угол поворота изменяется по закону равномерного вращения: φ = w0t + a.
Слайд 18Если некоторая материальная точка совершает гармоническое колебательное движение около положения равновесия вдоль
Если некоторая материальная точка совершает гармоническое колебательное движение около положения равновесия вдоль
Слайд 19Характеристики колебательного движения
1. Амплитуда
2. Период
3. Частота
*
Характеристики колебательного движения
1. Амплитуда
2. Период
3. Частота
*
Слайд 20Период колебаний - (Т) наименьший промежуток времени, через который повторяются значения всех
Период колебаний - (Т) наименьший промежуток времени, через который повторяются значения всех
Слайд 21*
Амплитуда - Наибольшее (по модулю) отклонение колеблющегося тела от положения равновесия
*
Амплитуда - Наибольшее (по модулю) отклонение колеблющегося тела от положения равновесия
Слайд 22
Механические гармонические колебания
Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется
Механические гармонические колебания Гармонические колебания – простейшие периодические колебания, при которых координата тела меняется
Слайд 23
Если в начальный момент времени тело проходит положение равновесия, то колебания являются
Если в начальный момент времени тело проходит положение равновесия, то колебания являются
Слайд 24
Кинематика колебаний
Циклическая частота связана с линейной частотой и периодом следующими соотношениями
*
Кинематика колебаний
Циклическая частота связана с линейной частотой и периодом следующими соотношениями
*
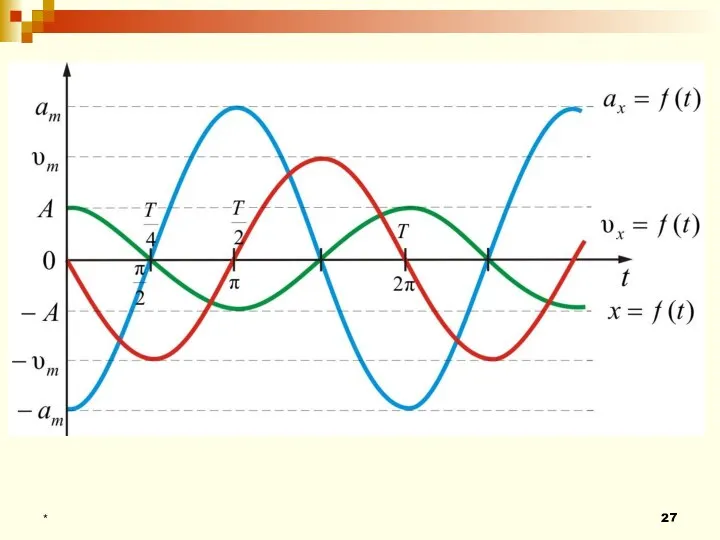
Слайд 25Скорость колеблющейся точки меняется по закону:
Скорость колеблющейся точки меняется по закону:
Слайд 26Ускорение:
Ускорение:
Слайд 28Сила, вызывающая колебания, обладает следующими свойствами
2. модуль силы пропорционален смещению
Сила, вызывающая колебания, обладает следующими свойствами
2. модуль силы пропорционален смещению
Слайд 29 Такие силы называют возвращающими.
Зависимость характерна для упругой силы. F = -kx
Следовательно,
Такие силы называют возвращающими.
Зависимость характерна для упругой силы. F = -kx
Следовательно,
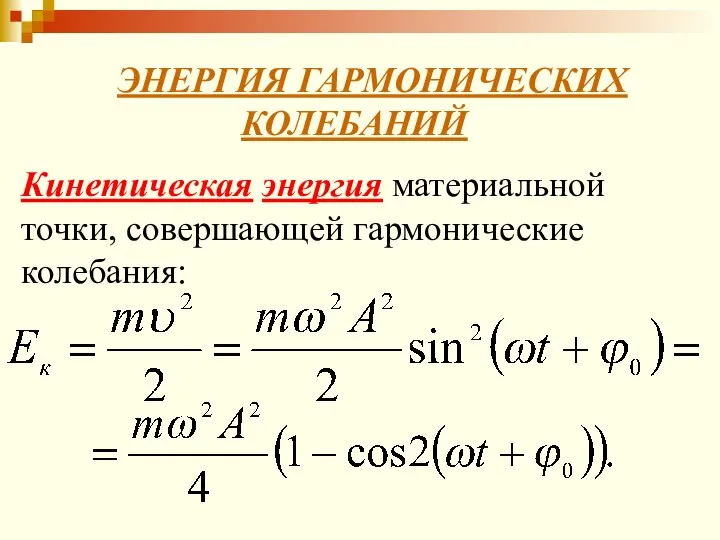
Слайд 31 ЭНЕРГИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
Кинетическая энергия материальной точки, совершающей гармонические колебания:
ЭНЕРГИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
Кинетическая энергия материальной точки, совершающей гармонические колебания:
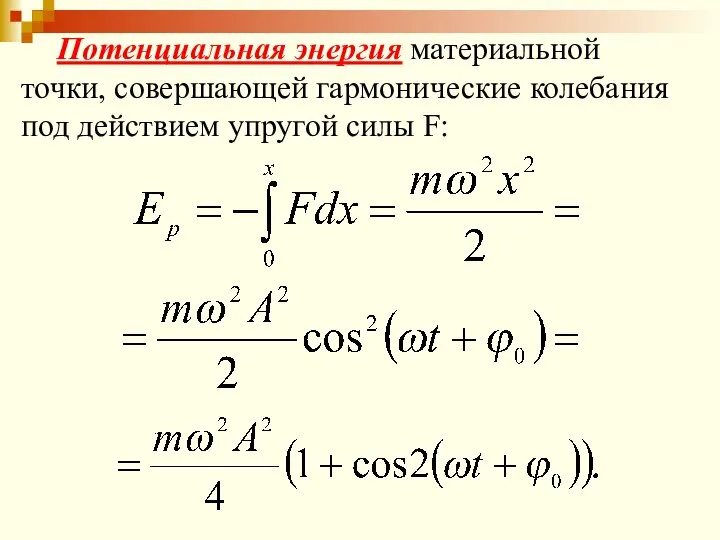
Слайд 32 Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F:
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F:
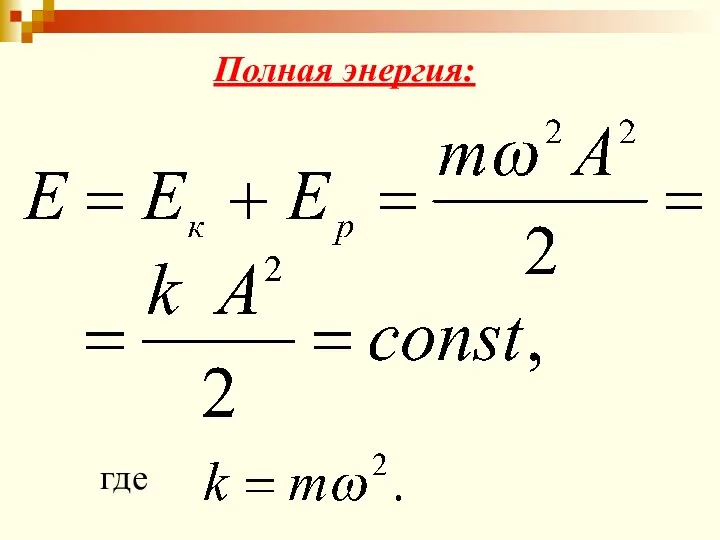
Слайд 33Полная энергия:
где
Полная энергия:
где
Слайд 35Гармонический осциллятор
Осциллятор – система, совершающая свободные колебания.
Классический осциллятор – механическая система,
Гармонический осциллятор
Осциллятор – система, совершающая свободные колебания.
Классический осциллятор – механическая система,
Слайд 36Дифференциальное уравнение гармонического осциллятора
Решение этого уравнения:
Здесь x – колеблющаяся величина.
Дифференциальное уравнение гармонического осциллятора
Решение этого уравнения:
Здесь x – колеблющаяся величина.
Слайд 37
Маятники
Маятник- тело, совершающее колебания относительно положения равновесия под действием приложенных к нему
Маятники Маятник- тело, совершающее колебания относительно положения равновесия под действием приложенных к нему
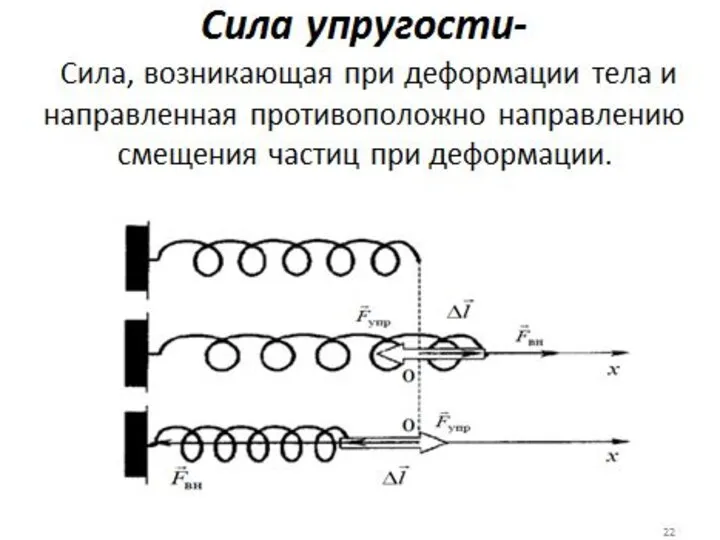
Слайд 38
Пружинный маятник
это закреплённый на пружине груз, способный совершать колебания в вертикальном
Пружинный маятник это закреплённый на пружине груз, способный совершать колебания в вертикальном
Слайд 39*
Рассмотрим простейшую колебательную систему: шарик массой m подвешен на пружине жесткостью к.
*
Рассмотрим простейшую колебательную систему: шарик массой m подвешен на пружине жесткостью к.
Слайд 40*
Изменение упругой силы по закону Гука пропорционально изменению длины пружины или смещению
*
Изменение упругой силы по закону Гука пропорционально изменению длины пружины или смещению
Слайд 41*
Уравнение второго закона Ньютона для шарика имеет вид:
Введем обозначения
Тогда
Решение уравнения
*
Уравнение второго закона Ньютона для шарика имеет вид:
Введем обозначения
Тогда
Решение уравнения
Слайд 42*
где (w0 t + a0 ) = a — фаза колебаний; a0 — начальная фаза
*
где (w0 t + a0 ) = a — фаза колебаний; a0 — начальная фаза
Слайд 43Решив данное уравнение, получим, что пружинный маятник совершает гармонические колебания по закону
Решив данное уравнение, получим, что пружинный маятник совершает гармонические колебания по закону
Слайд 44*
В горизонтальном направлении на груз действует только сила упругости со стороны пружины.
*
В горизонтальном направлении на груз действует только сила упругости со стороны пружины.
Слайд 45Физический маятник
Твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной
Физический маятник
Твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной
Слайд 46
тела момент M возвращающей силы можно записать в виде (1)
где J —
тела момент M возвращающей силы можно записать в виде (1) где J —
Слайд 47*
решение которого :
При малых колебаниях физический маятник совершает гармонические колебания с периодом
где
*
решение которого :
При малых колебаниях физический маятник совершает гармонические колебания с периодом
где
Слайд 48J – момент инерции маятника относительно оси, проходящей через точку подвеса.
Приведенная длина
J – момент инерции маятника относительно оси, проходящей через точку подвеса.
Приведенная длина
Слайд 49*
Применяя теорему Штейнера, получим
т. е. ОО' всегда больше ОС. Точка подвеса О
*
Применяя теорему Штейнера, получим
т. е. ОО' всегда больше ОС. Точка подвеса О
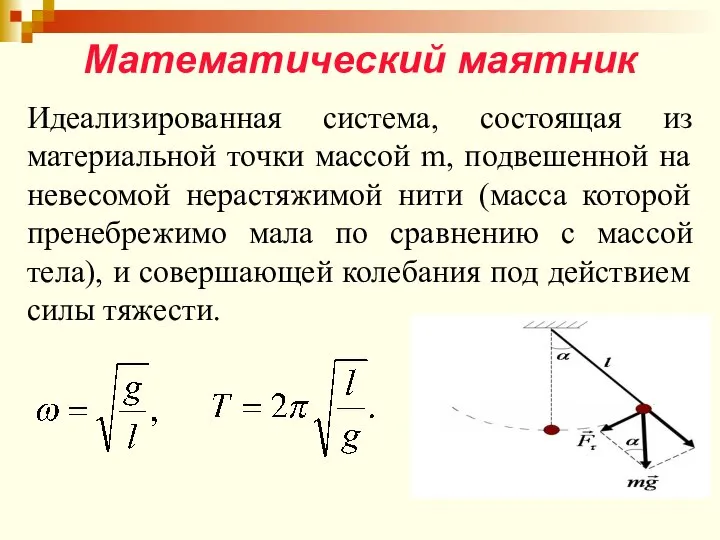
Слайд 50Математический маятник
Идеализированная система, состоящая из материальной точки массой m, подвешенной на невесомой
Математический маятник
Идеализированная система, состоящая из материальной точки массой m, подвешенной на невесомой
Слайд 51Сложение гармонических колебаний
Способ представления колебаний с помощью вращающегося вектора амплитуды
Сложение гармонических колебаний
Способ представления колебаний с помощью вращающегося вектора амплитуды
Слайд 52Сложение двух одинаково направленных колебаний
1. Сложение гармонических колебаний одного направления и одинаковой
Сложение двух одинаково направленных колебаний
1. Сложение гармонических колебаний одного направления и одинаковой
Слайд 53
Для нахождения результирующего колебания воспользуемся методом векторных диаграмм.
Для нахождения результирующего колебания воспользуемся методом векторных диаграмм.
Слайд 54Если колебания синфазны: φ2 – φ1 = ±2mπ, следовательно, А = А1 + А2, происходит усиление результирующего колебания.
Если колебания
Если колебания синфазны: φ2 – φ1 = ±2mπ, следовательно, А = А1 + А2, происходит усиление результирующего колебания.
Если колебания
Слайд 552. Сложение гармонических колебаний одного направления с частотами неравными, но близкими -
2. Сложение гармонических колебаний одного направления с частотами неравными, но близкими -
Слайд 56*
Периодические изменения амплитуды от минимального значения до максимального называются биениями.
Уравнение результирующего
*
Периодические изменения амплитуды от минимального значения до максимального называются биениями.
Уравнение результирующего
Слайд 57*
Результирующее колебание можно рассматривать как гармоническое с частотой ω, амплитуда Аб которого
*
Результирующее колебание можно рассматривать как гармоническое с частотой ω, амплитуда Аб которого
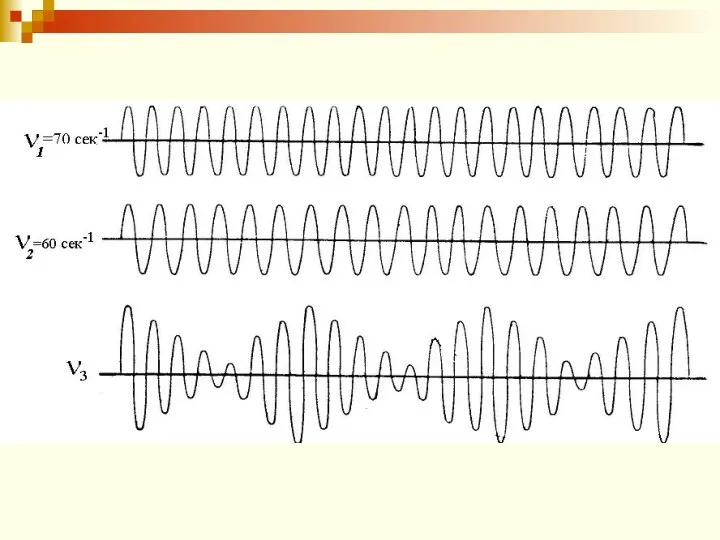
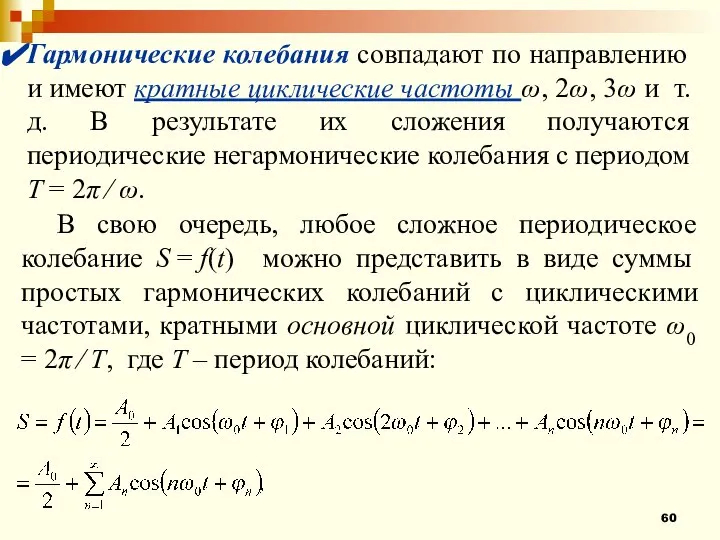
Слайд 60Гармонические колебания совпадают по направлению и имеют кратные циклические частоты ω, 2ω,
Гармонические колебания совпадают по направлению и имеют кратные циклические частоты ω, 2ω,
Слайд 61*
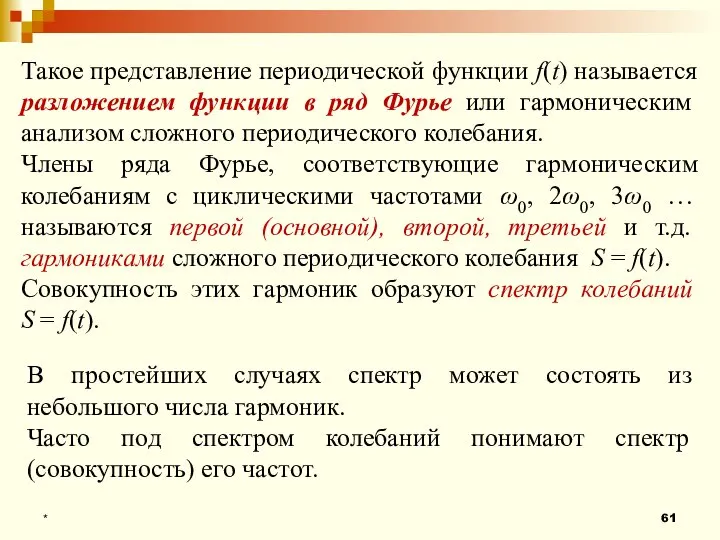
Такое представление периодической функции f(t) называется разложением функции в ряд Фурье или
*
Такое представление периодической функции f(t) называется разложением функции в ряд Фурье или
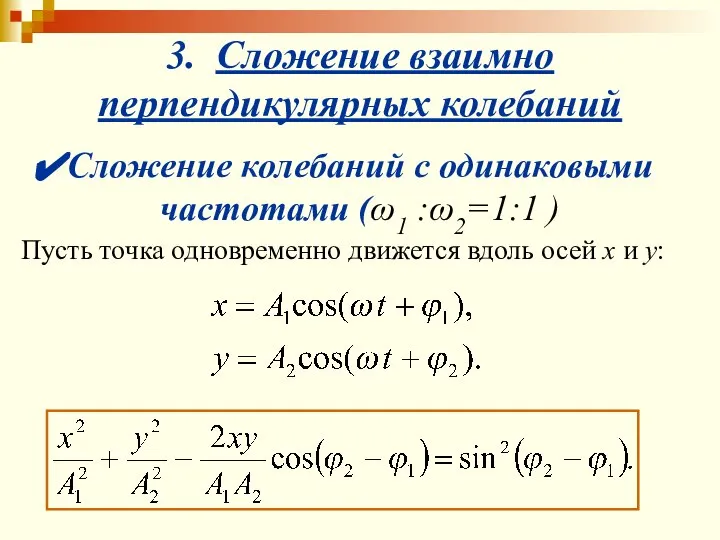
Слайд 623. Сложение взаимно перпендикулярных колебаний
Сложение колебаний с одинаковыми частотами (ω1 :ω2=1:1 )
Пусть
3. Сложение взаимно перпендикулярных колебаний
Сложение колебаний с одинаковыми частотами (ω1 :ω2=1:1 )
Пусть
Слайд 63Рассмотрим несколько частных случаев:
1) Фазы колебаний равны.
x = A1 sin ωt;
y
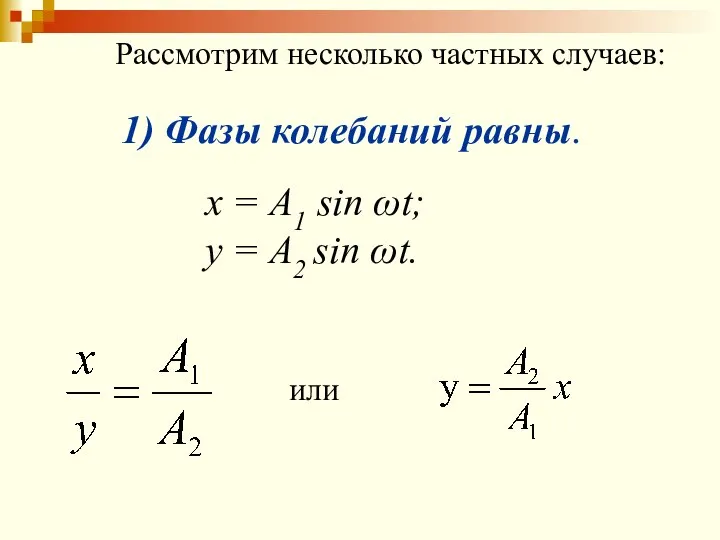
Рассмотрим несколько частных случаев:
1) Фазы колебаний равны.
x = A1 sin ωt;
y
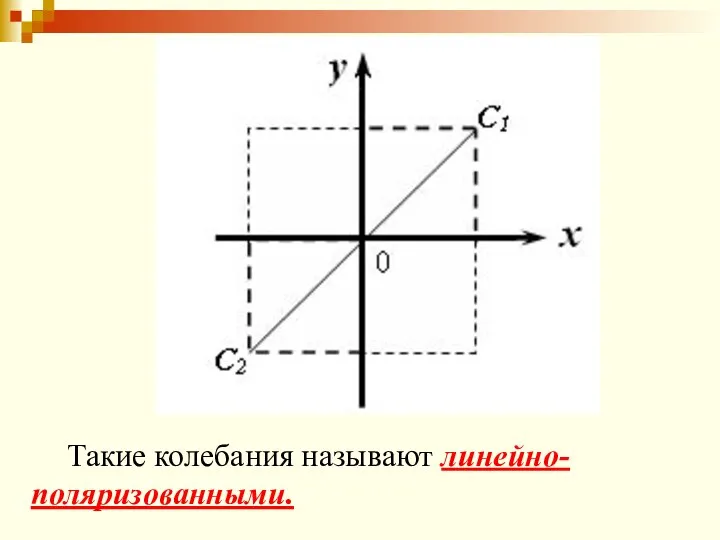
Слайд 64 Такие колебания называют линейно-поляризованными.
Такие колебания называют линейно-поляризованными.
Слайд 652) Разность фаз равна π.
x = A1 sin (ωt + π)
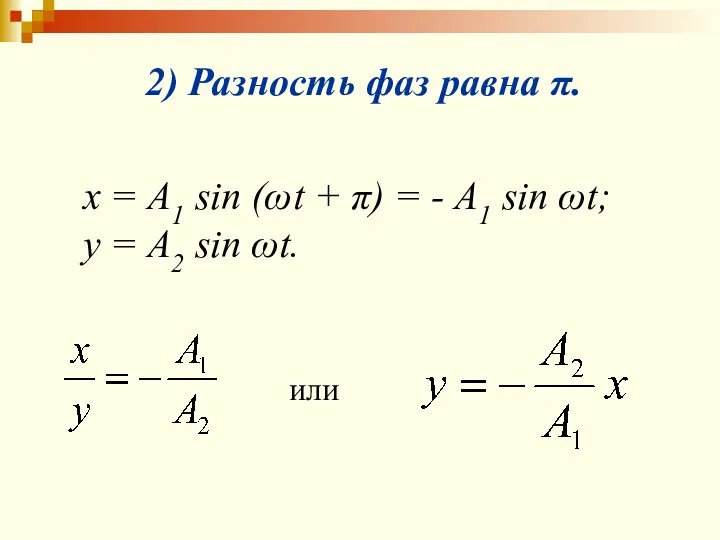
2) Разность фаз равна π.
x = A1 sin (ωt + π)
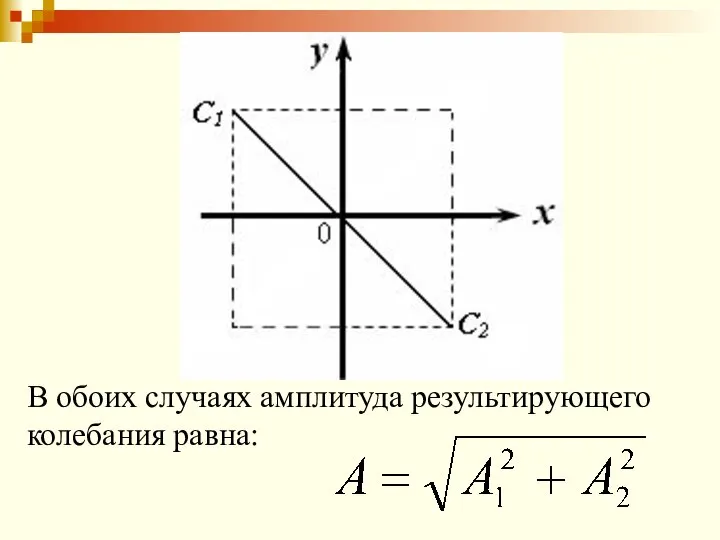
Слайд 66В обоих случаях амплитуда результирующего колебания равна:
В обоих случаях амплитуда результирующего колебания равна:
Слайд 673) Разность фаз равна π/2.
3) Разность фаз равна π/2.
Слайд 68 Такие колебания называют эллиптически поляризованными.
Такие колебания называют эллиптически поляризованными.
Слайд 70 Если частоты складываемых колебаний относятся друг к другу как целые числа, то
Если частоты складываемых колебаний относятся друг к другу как целые числа, то
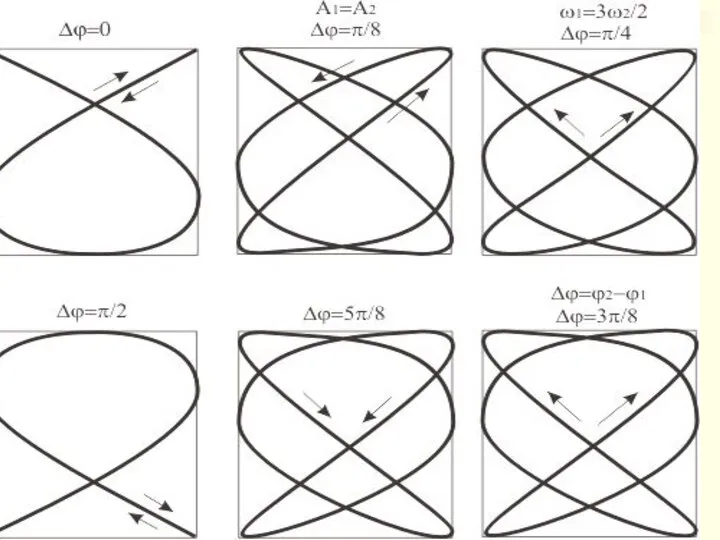
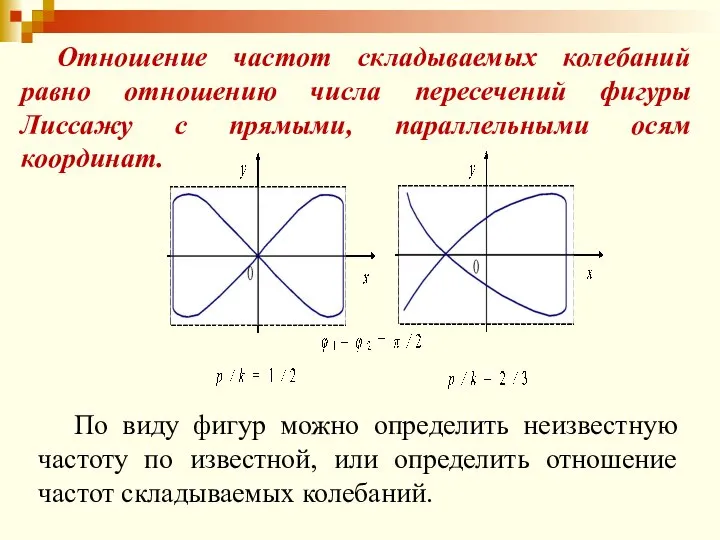
Слайд 72 По виду фигур можно определить неизвестную частоту по известной, или определить отношение
По виду фигур можно определить неизвестную частоту по известной, или определить отношение
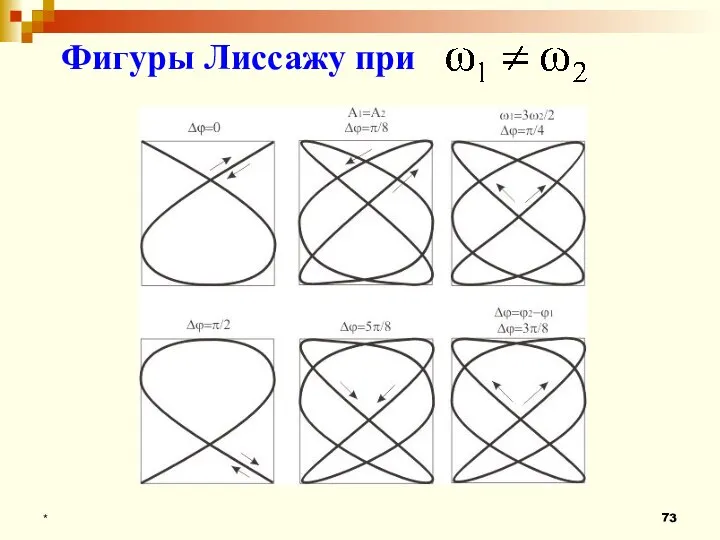
Слайд 73*
Фигуры Лиссажу при
*
Фигуры Лиссажу при
Слайд 74Затухающие колебания
Затухающие колебания – колебания, амплитуда которых из-за потерь энергии реальной колебательной
Затухающие колебания
Затухающие колебания – колебания, амплитуда которых из-за потерь энергии реальной колебательной
Слайд 75 Закон затухания колебаний определяется свойствами колебательных систем.
Обычно рассматриваются линейные системы – идеализированные
Закон затухания колебаний определяется свойствами колебательных систем.
Обычно рассматриваются линейные системы – идеализированные
Слайд 76*
Дифференциальное уравнение свободных затухающих колебаний линейной системы:
х – колеблющаяся величина,
β = const – коэффициент
*
Дифференциальное уравнение свободных затухающих колебаний линейной системы:
х – колеблющаяся величина,
β = const – коэффициент
Слайд 77*
График этой функции дан на рисунке.
*
График этой функции дан на рисунке.
Слайд 78 Для пружинного маятника массой m, совершающего малые колебания под действием упругой силы,
Для пружинного маятника массой m, совершающего малые колебания под действием упругой силы,
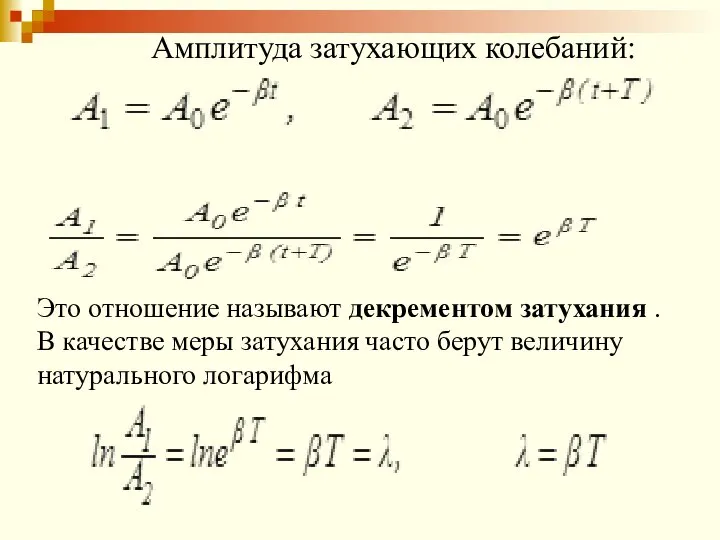
Слайд 79Амплитуда затухающих колебаний:
Это отношение называют декрементом затухания .
В качестве меры затухания часто берут величину
Амплитуда затухающих колебаний:
Это отношение называют декрементом затухания .
В качестве меры затухания часто берут величину
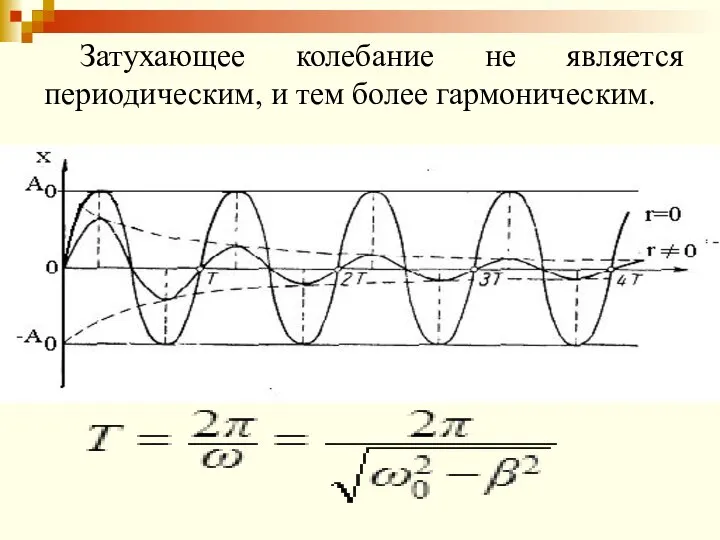
Слайд 80 Затухающее колебание не является периодическим, и тем более гармоническим.
Затухающее колебание не является периодическим, и тем более гармоническим.
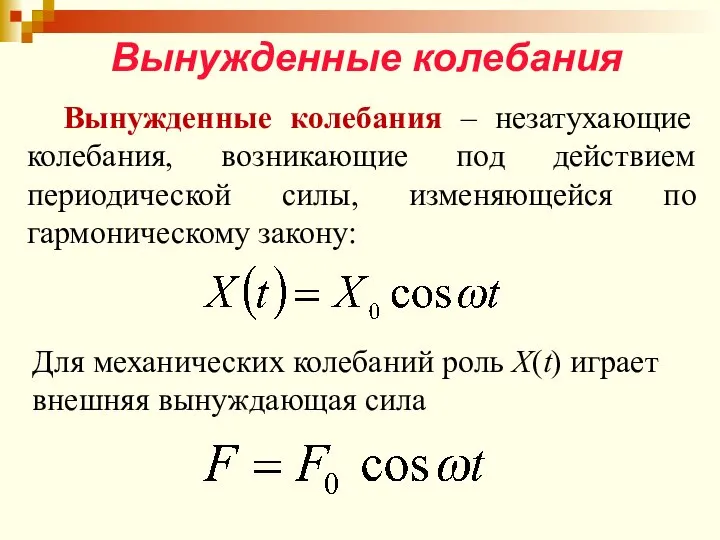
Слайд 81Вынужденные колебания
Вынужденные колебания – незатухающие колебания, возникающие под действием периодической силы, изменяющейся
Вынужденные колебания
Вынужденные колебания – незатухающие колебания, возникающие под действием периодической силы, изменяющейся
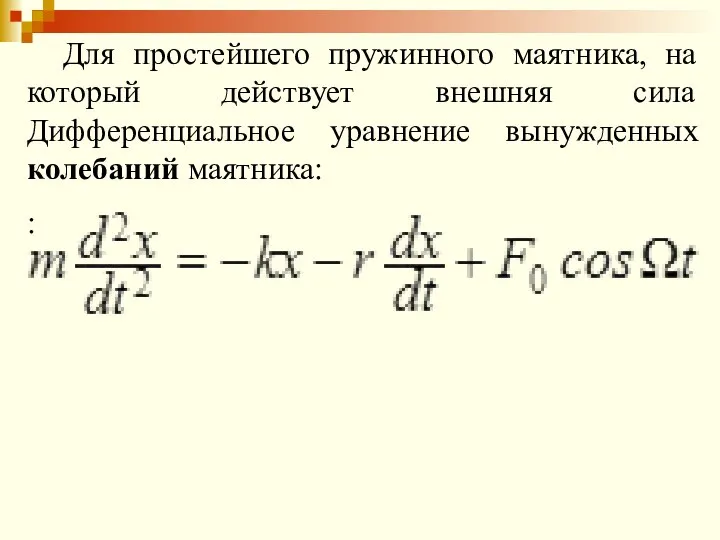
Слайд 82 Для простейшего пружинного маятника, на который действует внешняя сила Дифференциальное уравнение вынужденных
Для простейшего пружинного маятника, на который действует внешняя сила Дифференциальное уравнение вынужденных
Слайд 83В установившемся режиме вынужденные колебания являются гармоническими, происходят с частотой внешней гармонической
В установившемся режиме вынужденные колебания являются гармоническими, происходят с частотой внешней гармонической
Слайд 84 В случае установившихся колебаний при некоторой частоте внешней силы – резонансной частоте
В случае установившихся колебаний при некоторой частоте внешней силы – резонансной частоте
 Механическое движение
Механическое движение Передача электроэнергии от источника к потребителю
Передача электроэнергии от источника к потребителю Презентация на тему Изобретатель радио – А.С. Попов
Презентация на тему Изобретатель радио – А.С. Попов  Презентация на тему Элементарные частицы
Презентация на тему Элементарные частицы  Устройство для наматывания нижней нити на шпульку
Устройство для наматывания нижней нити на шпульку Основные понятия теории механизмов и машин
Основные понятия теории механизмов и машин Общие сведения о передачах. Лекция №4
Общие сведения о передачах. Лекция №4 Закон сохранения электрического заряда. Закон Кулона
Закон сохранения электрического заряда. Закон Кулона Общее устройство автомобиля
Общее устройство автомобиля Поверхностное натяжение
Поверхностное натяжение Назначение, классификация и конструкция колесных пар локомотива
Назначение, классификация и конструкция колесных пар локомотива Физическая картина мира. Плотность
Физическая картина мира. Плотность Как создать суперкар и решить задачи, возникающие при его создании
Как создать суперкар и решить задачи, возникающие при его создании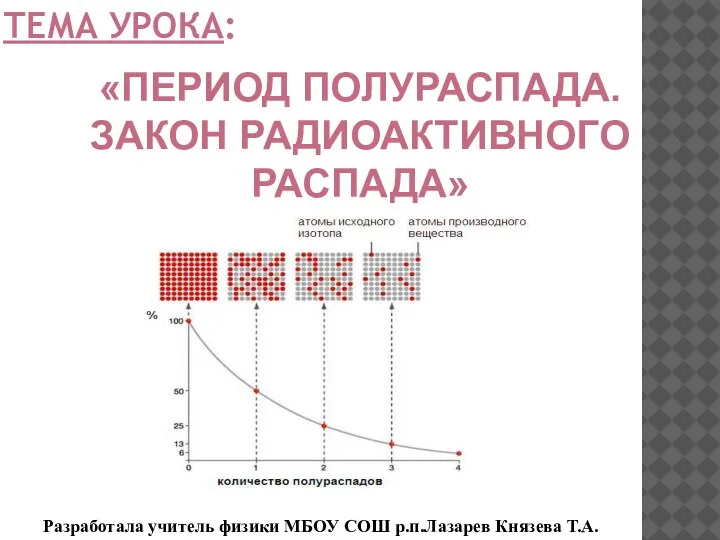 Закон радиоактивного распада. Период полураспада радиоактивных изотопов
Закон радиоактивного распада. Период полураспада радиоактивных изотопов Теория относительности. Релятивистская механика
Теория относительности. Релятивистская механика Температура и тепловое равновесие
Температура и тепловое равновесие Свойства веществ
Свойства веществ Резка металла слесарной ножовкой
Резка металла слесарной ножовкой Сила. Явление тяготения. Сила тяжести
Сила. Явление тяготения. Сила тяжести Замедляющие структуры
Замедляющие структуры Фотоэффект
Фотоэффект Технология рентгеновских трубок. (Лекция 6)
Технология рентгеновских трубок. (Лекция 6) Физика и познание мира
Физика и познание мира Сложение двух сил, направленных по одной прямой. Равнодействующая сила
Сложение двух сил, направленных по одной прямой. Равнодействующая сила Квазихимический метод описания дефектов
Квазихимический метод описания дефектов Естественный способ задания движения
Естественный способ задания движения Терагерцовая спектроскопия металлических ансамблей частиц
Терагерцовая спектроскопия металлических ансамблей частиц Законы Ньютона
Законы Ньютона