- lek2 _кинем

Содержание
- 2. Материальная точка – физическая модель объекта Модель – абстрактная система, являющаяся упрощенной копией реальной системы. Материальная
- 3. Положение материальной точки определяется по отношению к какому-либо другому произвольно выбранному телу. Тело отсчета – условное
- 4. Приборы, служащие для определения положения движущегося тела – линейка и т.п. Прибор, служащий для определения времени
- 5. Тело отсчета, связанная с ним система координат, линейка, часы и приборы для синхронизации часов составляют пространственно-временную
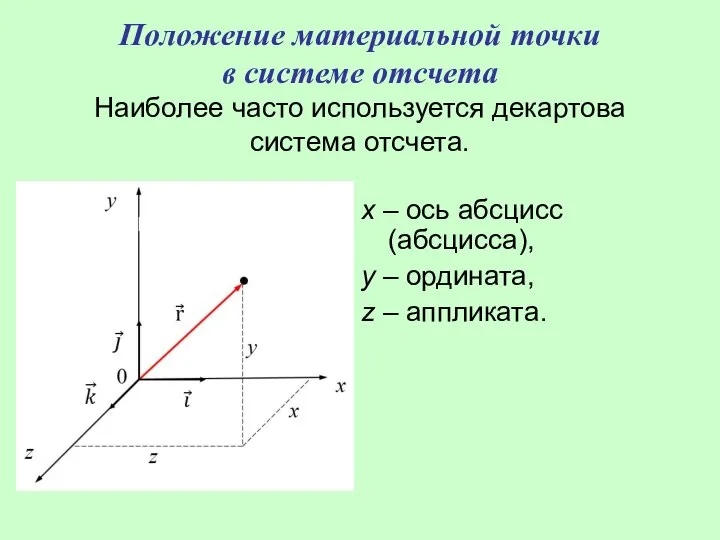
- 6. Положение материальной точки в системе отсчета Наиболее часто используется декартова система отсчета. x – ось абсцисс
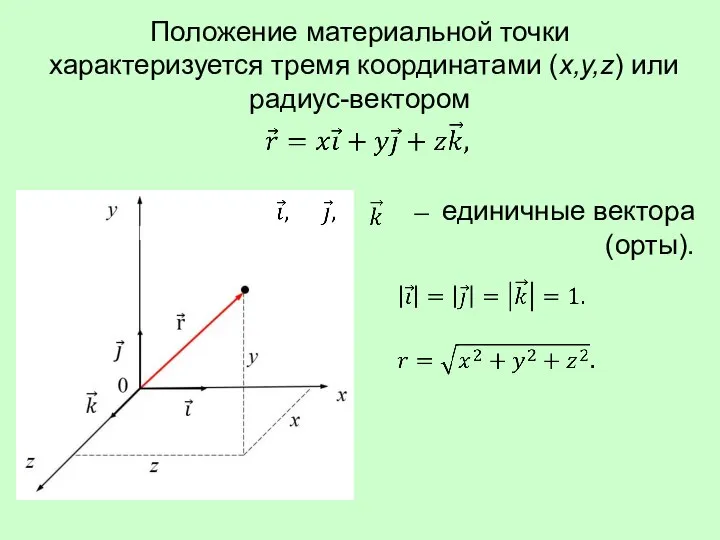
- 7. Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором единичные вектора (орты).
- 8. При движении материальной точки её координата с течением времени изменяется. Движение материальной точки определяется скалярными уравнениями
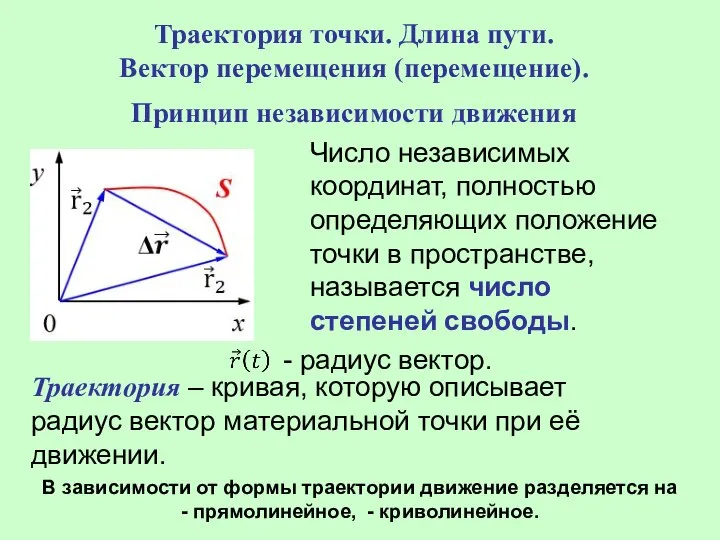
- 9. Траектория точки. Длина пути. Вектор перемещения (перемещение). Принцип независимости движения Число независимых координат, полностью определяющих положение
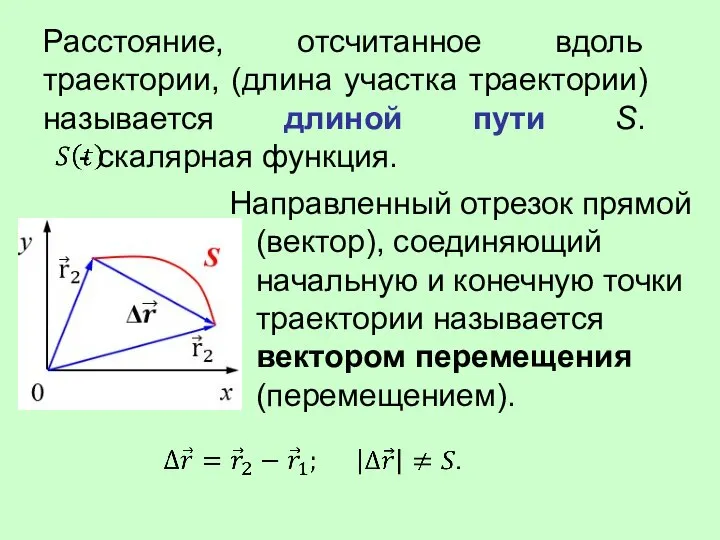
- 10. Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S. - скалярная функция. Направленный отрезок
- 11. При прямолинейном движении Если движение происходит в течение бесконечно малого времени Δt → 0, то по
- 12. Если материальная точка участвует в нескольких перемещениях, то результирующее перемещение равно векторной сумме перемещений, совершаемых материальной
- 13. Скорость движения материальной точки. Понятие о кривизне Материальная точка движется по криволинейной траектории. За время Δt1
- 14. Вектор средней скорости – отношение перемещения к промежутку времени Вектор средней скорости характеризует изменение положения радиус-вектора.
- 15. Мгновенная скорость материальной точки – векторная величина, равная первой производной радиус-вектора движущейся точки по времени. ,
- 16. В математике производной функции в точке x0 называется предел отношения изменения функции Δy в этой точке
- 17. Физический смысл производной: это среднее значение изменения функции на таком интервале, на котором среднее значение функции
- 18. Неравномерное движение Средняя скорость неравномерного движения – скалярная величина. Средняя скорость больше модуля вектора средней скорости.
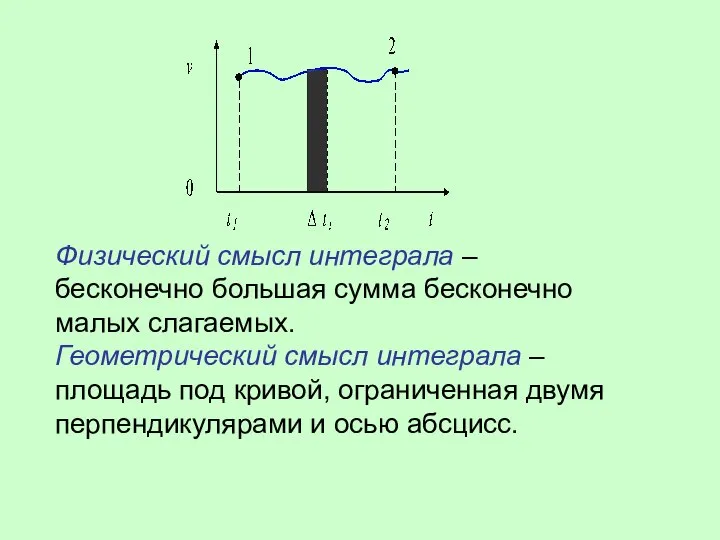
- 19. Вычисление пройденного пути. Понятие об интеграле vi – мгновенная скорость.
- 20. Физический смысл интеграла – бесконечно большая сумма бесконечно малых слагаемых. Геометрический смысл интеграла – площадь под
- 21. Средняя скорость прохождения пути Средняя скорость неравномерного движения – средняя скорость такого равномерного движения, при котором
- 22. Ускорение Мгновенное ускорение
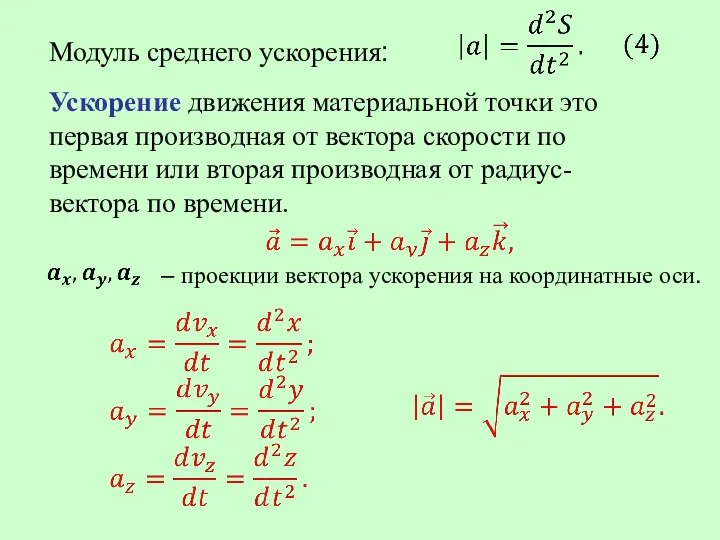
- 23. Модуль среднего ускорения: Ускорение движения материальной точки это первая производная от вектора скорости по времени или
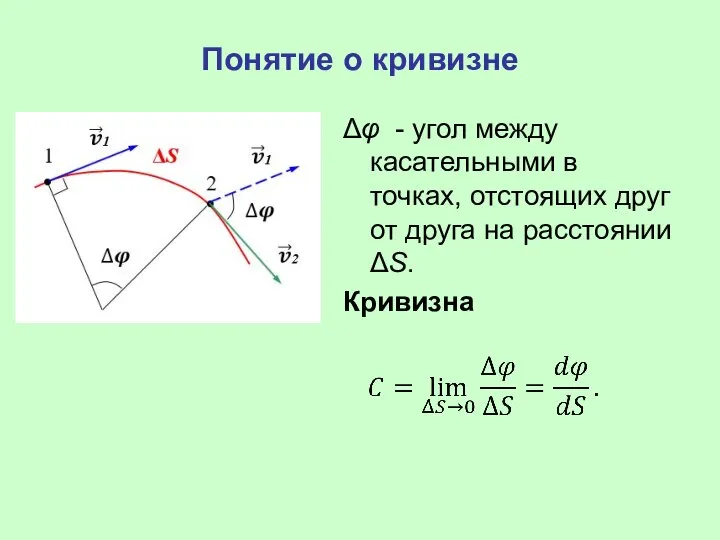
- 24. Понятие о кривизне Δφ - угол между касательными в точках, отстоящих друг от друга на расстоянии
- 25. Кривизна траектории характеризует скорость поворота касательной при движении или степень искривленности кривой. Радиус кривизны траектории в
- 26. Нормальное и тангенциальное ускорения при криволинейном движении Разложим вектор Δv на две составляющие.
- 27. Нормальное и тангенциальное ускорение нормальное ускорение характеризует изменение скорости по направлению. Вектор направлен в данной точке
- 28. – тангенциальное ускорение характеризует изменение скорости по величине и направлено вдоль скорости (или в обратную сторону).
- 29. НЕКОТОРЫЕ ВИДЫ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
- 30. Основная задача механики (Прямая задача) Состоит в нахождении закона движения – кинематического уравнения. Закон движения –
- 31. Обратная задача механики Определение кинематического уравнения движения по известным характеристикам движения.
- 32. Понятие об абсолютно твердым телом (АТТ). Поступательное и вращательное движение Абсолютно твердое тело – это модель,
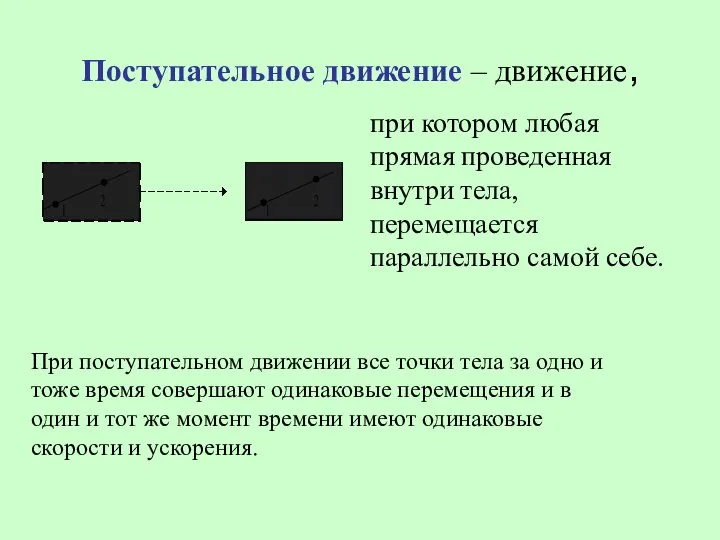
- 33. Поступательное движение – движение, при котором любая прямая проведенная внутри тела, перемещается параллельно самой себе. При
- 34. Абсолютно твердое тело Поступательное движение АТТ можно рассматривать, как движение материальной точки.
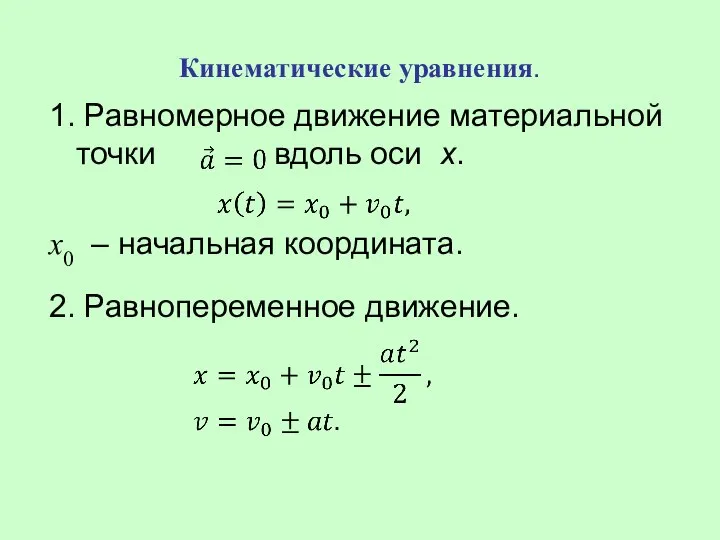
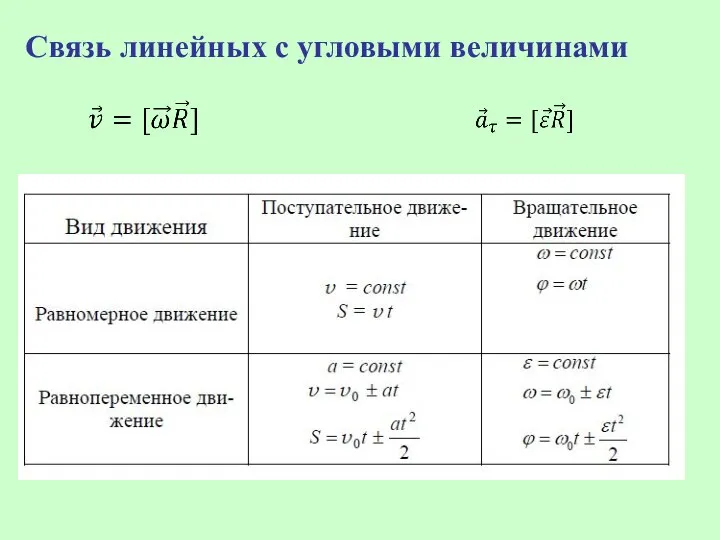
- 35. Кинематические уравнения. 1. Равномерное движение материальной точки вдоль оси x. x0 – начальная координата. 2. Равнопеременное
- 36. ЭНЕРГЕТИКА (параграфы 1.1.7, 1.1.8, 3.1 Методического навигатора) Вращающиеся тела представляют большой интерес для энергетиков. Вращаются роторы
- 37. Рабочее колесо турбины Красноярской ГЭС Гидротурбина Рабочее колесо паровой турбины
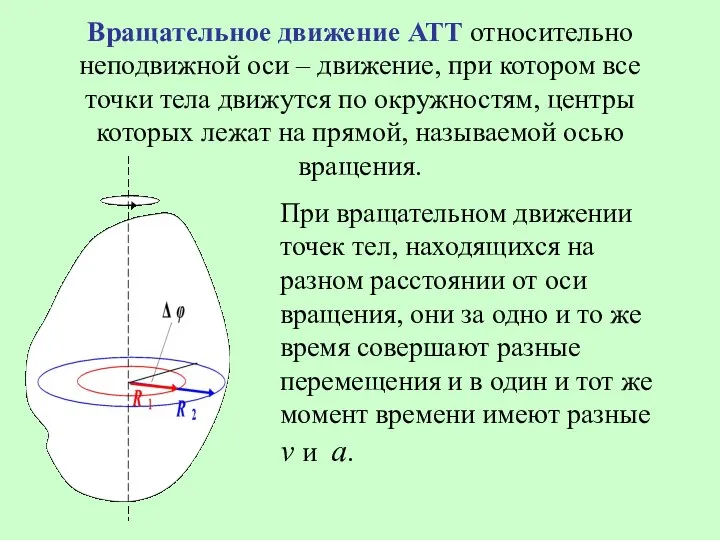
- 38. Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки тела движутся по окружностям,
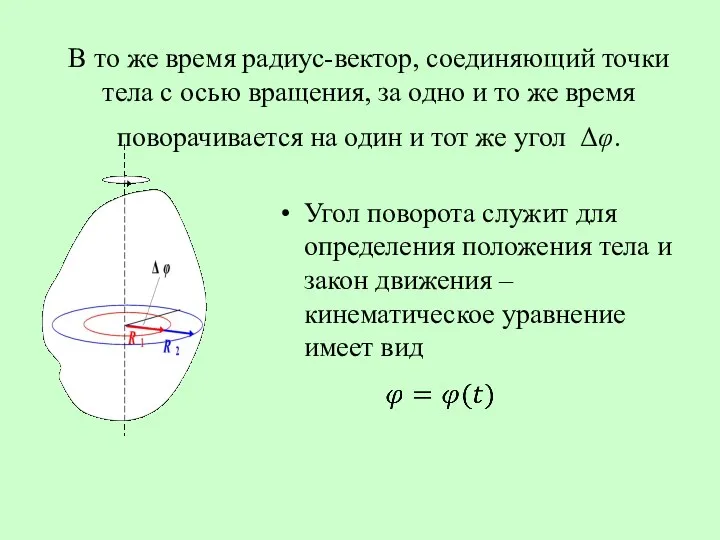
- 39. В то же время радиус-вектор, соединяющий точки тела с осью вращения, за одно и то же
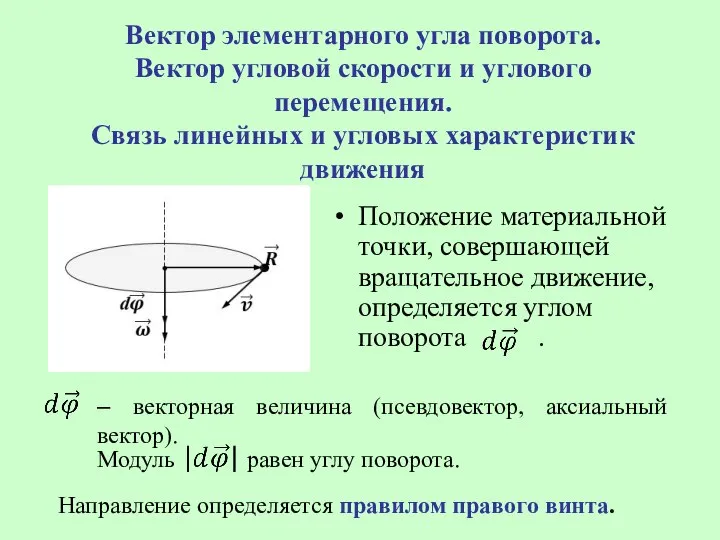
- 40. Вектор элементарного угла поворота. Вектор угловой скорости и углового перемещения. Связь линейных и угловых характеристик движения
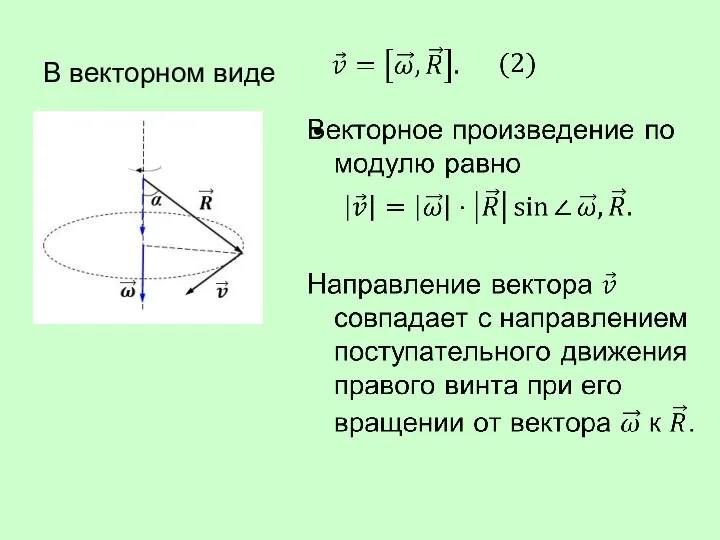
- 41. Угловая скорость – векторная величина, равная первой производной угла поворота по времени Линейная скорость точки В
- 42. В векторном виде
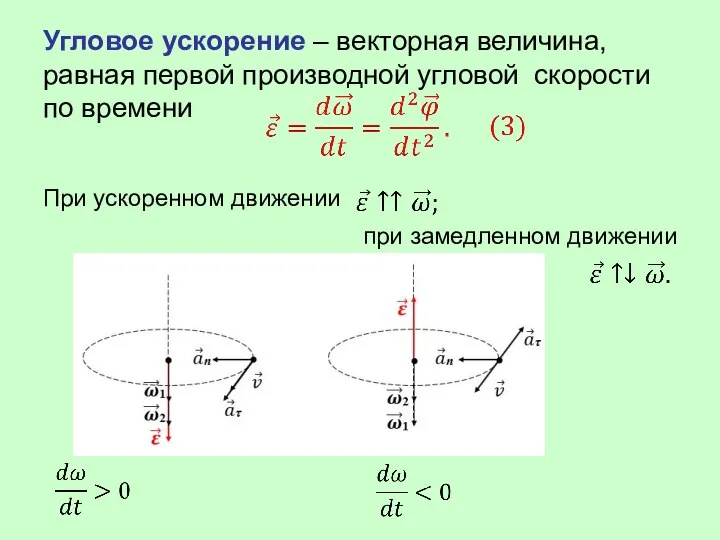
- 43. Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени При ускоренном движении при
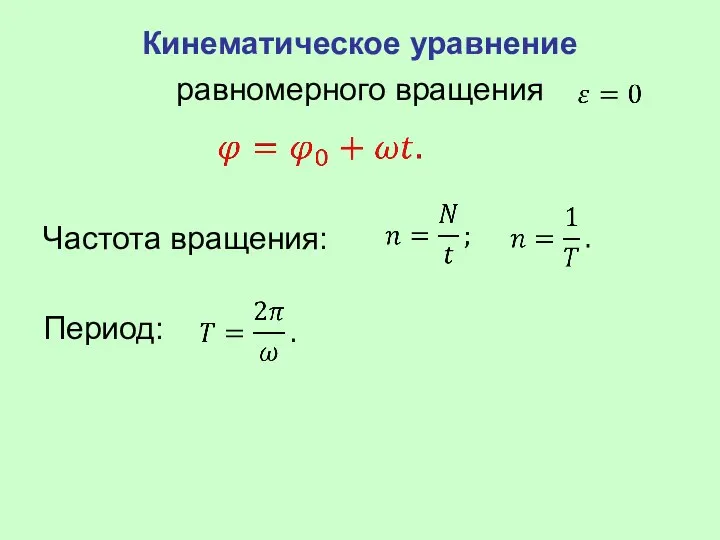
- 44. Кинематическое уравнение равномерного вращения Частота вращения: Период:
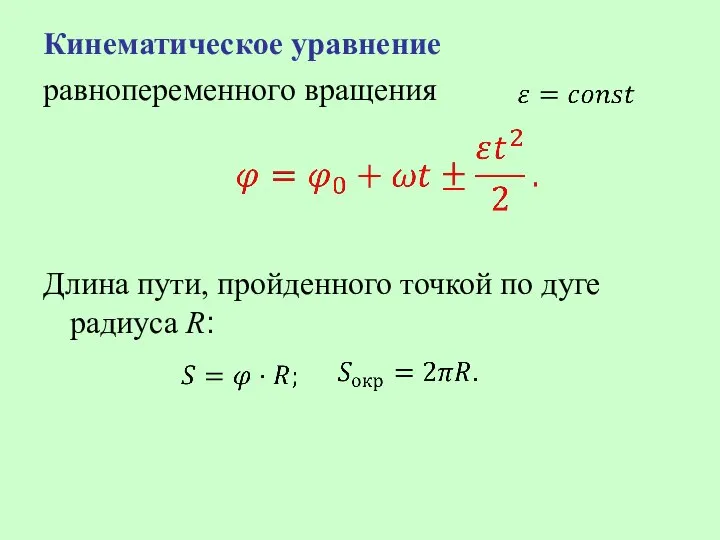
- 45. Кинематическое уравнение равнопеременного вращения Длина пути, пройденного точкой по дуге радиуса R:
- 46. Связь линейных с угловыми величинами
- 47. Скалярное и векторное произведение векторов ● Скалярное произведение: Пример: работа, совершаемая силой
- 49. Скачать презентацию
Слайд 2Материальная точка – физическая модель объекта
Модель – абстрактная система, являющаяся упрощенной
Материальная точка – физическая модель объекта
Модель – абстрактная система, являющаяся упрощенной

Слайд 3Положение материальной точки определяется по отношению к какому-либо другому произвольно выбранному телу.
Тело
Положение материальной точки определяется по отношению к какому-либо другому произвольно выбранному телу.
Тело
Слайд 4 Приборы, служащие для определения положения движущегося тела – линейка и т.п.
Прибор, служащий
Приборы, служащие для определения положения движущегося тела – линейка и т.п.
Прибор, служащий
Слайд 5 Тело отсчета, связанная с ним система координат, линейка, часы и приборы для
Тело отсчета, связанная с ним система координат, линейка, часы и приборы для
Слайд 6Положение материальной точки
в системе отсчета
Наиболее часто используется декартова система отсчета.
x –
Положение материальной точки
в системе отсчета
Наиболее часто используется декартова система отсчета.
x –
Слайд 7Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором
единичные вектора (орты).
Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором
единичные вектора (орты).
Слайд 8При движении материальной точки её координата с течением времени изменяется.
Движение материальной
При движении материальной точки её координата с течением времени изменяется.
Движение материальной
Слайд 9Траектория точки. Длина пути.
Вектор перемещения (перемещение).
Принцип независимости движения
Число независимых координат, полностью
Траектория точки. Длина пути.
Вектор перемещения (перемещение).
Принцип независимости движения
Число независимых координат, полностью
Слайд 10Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S.
-
Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S. -
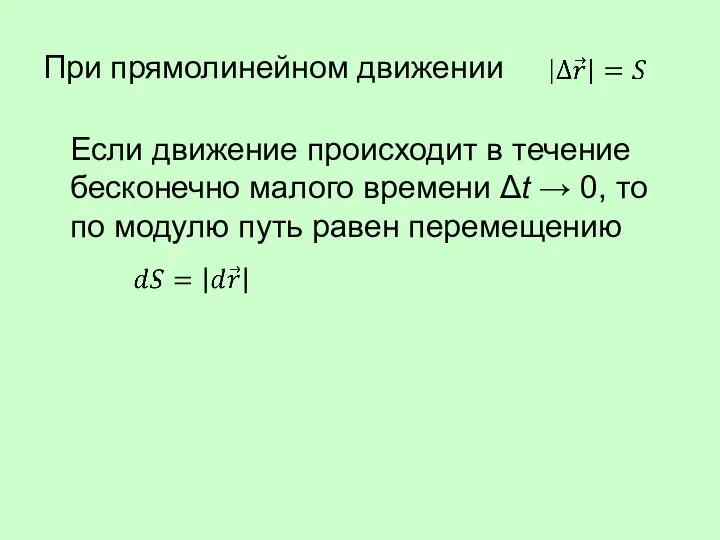
Слайд 11При прямолинейном движении
Если движение происходит в течение бесконечно малого времени Δt → 0,
При прямолинейном движении
Если движение происходит в течение бесконечно малого времени Δt → 0,
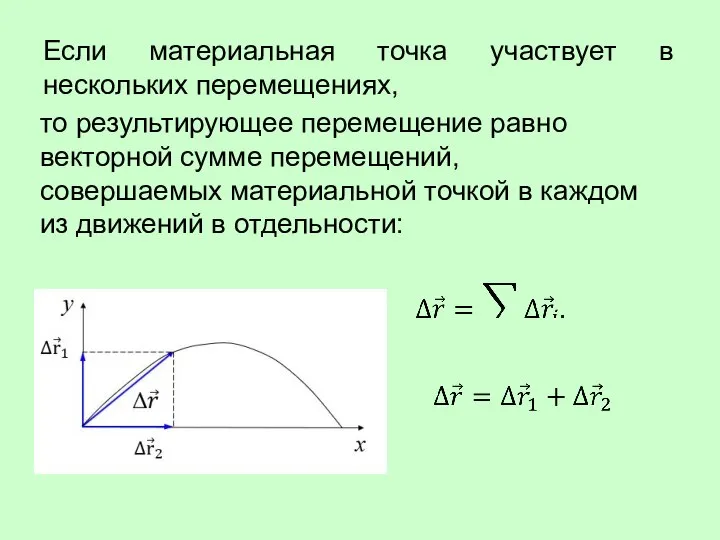
Слайд 12Если материальная точка участвует в нескольких перемещениях,
то результирующее перемещение равно векторной
Если материальная точка участвует в нескольких перемещениях,
то результирующее перемещение равно векторной
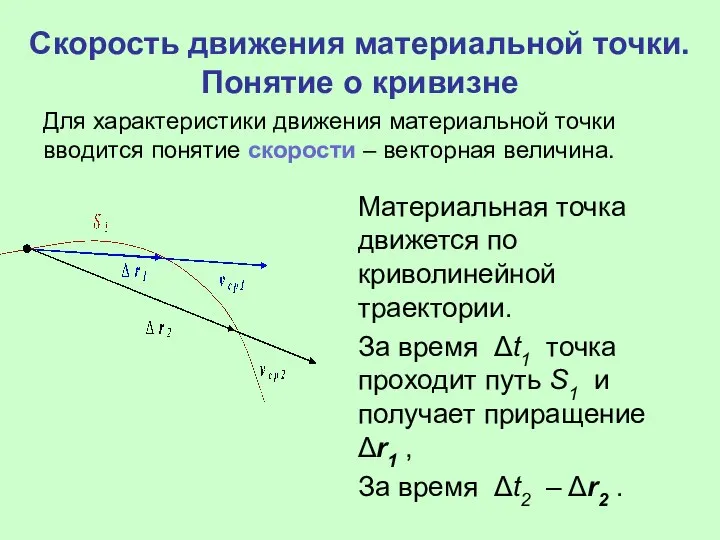
Слайд 13Скорость движения материальной точки.
Понятие о кривизне
Материальная точка движется по криволинейной траектории.
За время
Скорость движения материальной точки.
Понятие о кривизне
Материальная точка движется по криволинейной траектории.
За время
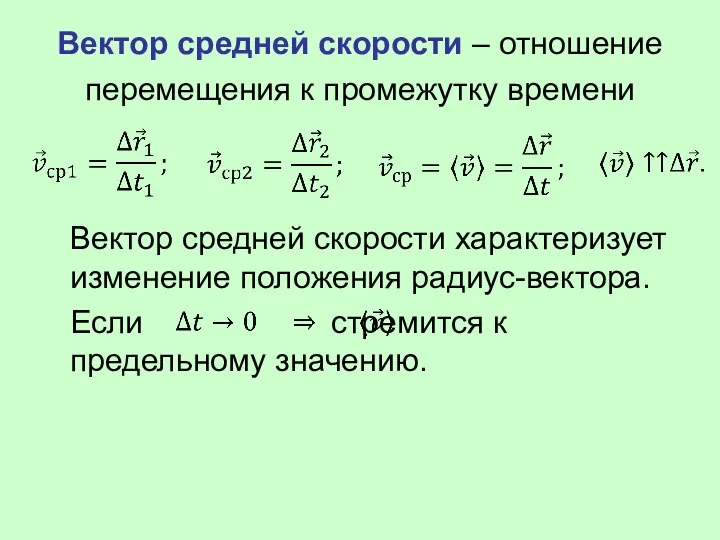
Слайд 14Вектор средней скорости – отношение перемещения к промежутку времени
Вектор средней скорости
Вектор средней скорости – отношение перемещения к промежутку времени
Вектор средней скорости
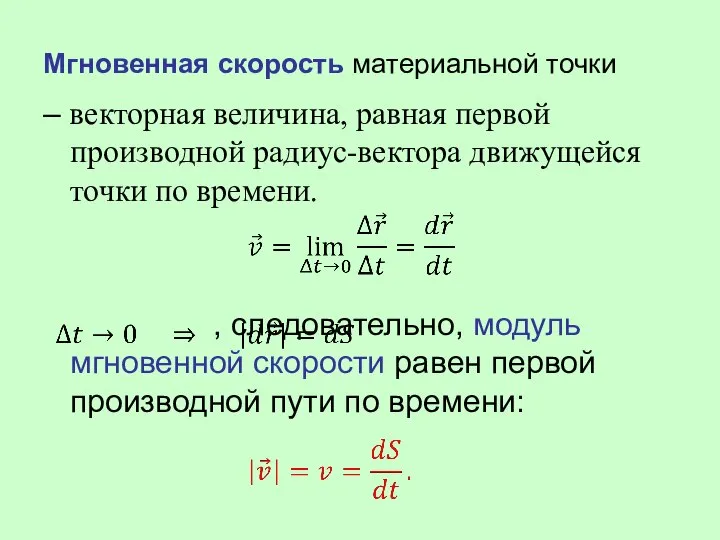
Слайд 15Мгновенная скорость материальной точки
– векторная величина, равная первой производной радиус-вектора движущейся
Мгновенная скорость материальной точки
– векторная величина, равная первой производной радиус-вектора движущейся
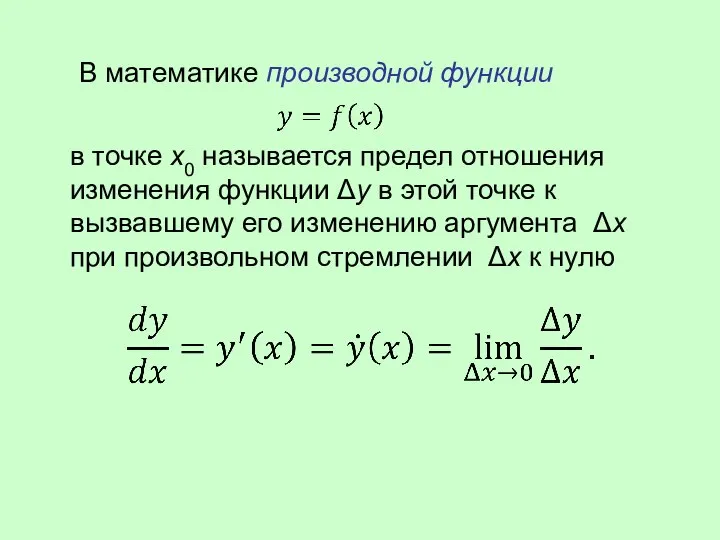
Слайд 16 В математике производной функции
в точке x0 называется предел отношения изменения функции
В математике производной функции
в точке x0 называется предел отношения изменения функции
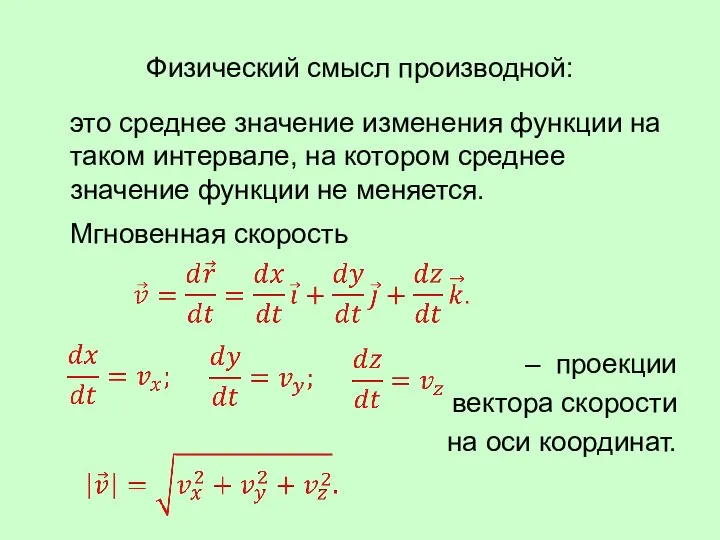
Слайд 17Физический смысл производной:
это среднее значение изменения функции на таком интервале, на котором
Физический смысл производной:
это среднее значение изменения функции на таком интервале, на котором
Слайд 18Неравномерное движение
Средняя скорость неравномерного движения – скалярная величина.
Средняя скорость больше модуля
Неравномерное движение
Средняя скорость неравномерного движения – скалярная величина.
Средняя скорость больше модуля

Слайд 19Вычисление пройденного пути.
Понятие об интеграле
vi – мгновенная скорость.
Вычисление пройденного пути.
Понятие об интеграле
vi – мгновенная скорость.
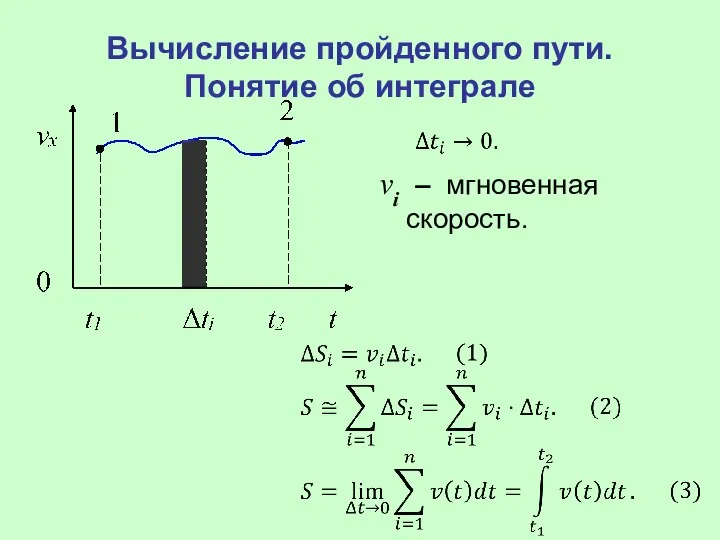
Слайд 20Физический смысл интеграла –
бесконечно большая сумма бесконечно
малых слагаемых.
Геометрический смысл интеграла
Физический смысл интеграла –
бесконечно большая сумма бесконечно
малых слагаемых.
Геометрический смысл интеграла
Слайд 21Средняя скорость прохождения пути
Средняя скорость неравномерного движения – средняя скорость такого
Средняя скорость прохождения пути
Средняя скорость неравномерного движения – средняя скорость такого
Слайд 22Ускорение
Мгновенное ускорение
Ускорение
Мгновенное ускорение

Слайд 23
Модуль среднего ускорения:
Ускорение движения материальной точки это первая производная от вектора скорости
Модуль среднего ускорения:
Ускорение движения материальной точки это первая производная от вектора скорости
Слайд 24Понятие о кривизне
Δφ - угол между касательными в точках, отстоящих друг от
Понятие о кривизне
Δφ - угол между касательными в точках, отстоящих друг от
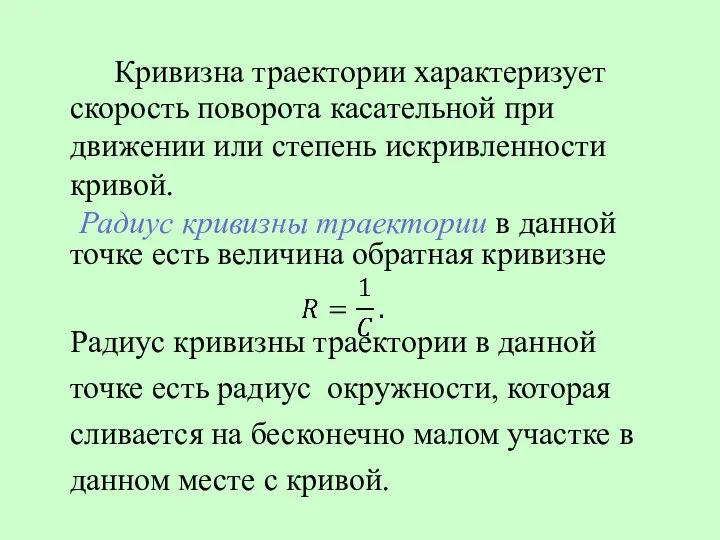
Слайд 25Кривизна траектории характеризует
скорость поворота касательной при движении или степень искривленности кривой.
Радиус
Кривизна траектории характеризует
скорость поворота касательной при движении или степень искривленности кривой.
Радиус
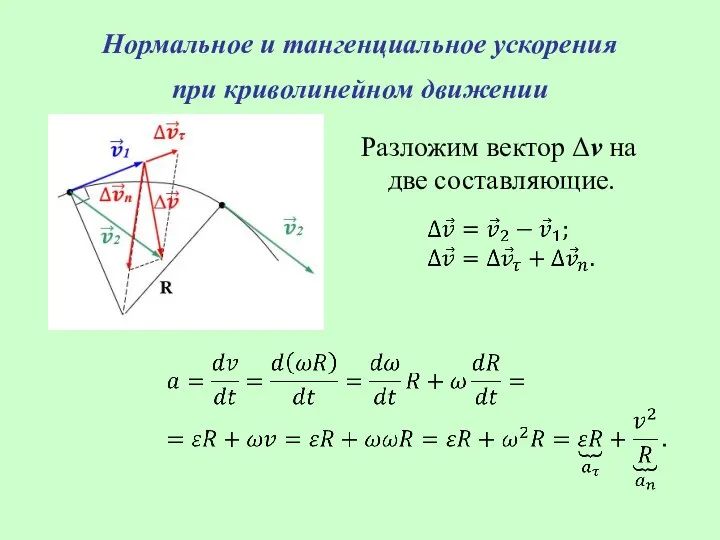
Слайд 26Нормальное и тангенциальное ускорения
при криволинейном движении
Разложим вектор Δv на две составляющие.
Нормальное и тангенциальное ускорения
при криволинейном движении
Разложим вектор Δv на две составляющие.
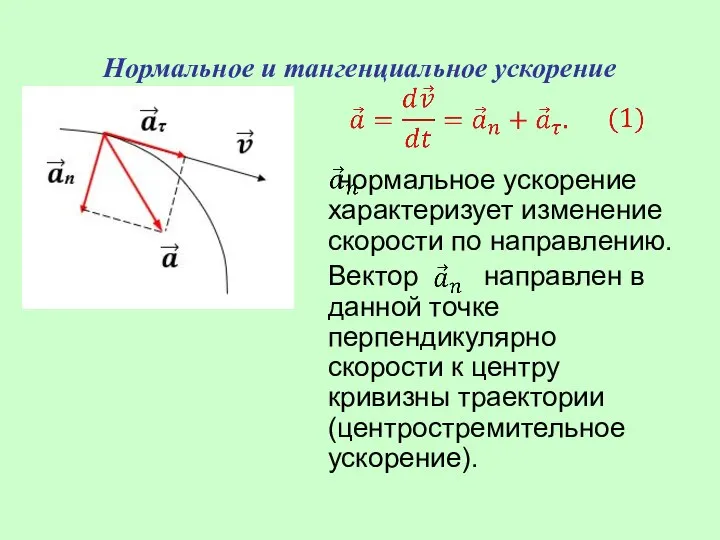
Слайд 27Нормальное и тангенциальное ускорение
нормальное ускорение характеризует изменение скорости по направлению.
Вектор направлен в
Нормальное и тангенциальное ускорение
нормальное ускорение характеризует изменение скорости по направлению.
Вектор направлен в
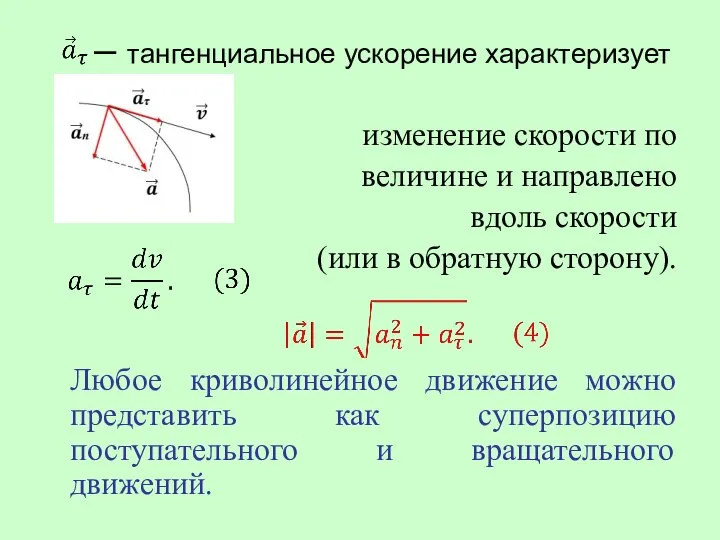
Слайд 28– тангенциальное ускорение характеризует
изменение скорости по
величине и направлено
вдоль скорости
– тангенциальное ускорение характеризует
изменение скорости по
величине и направлено
вдоль скорости
Слайд 29
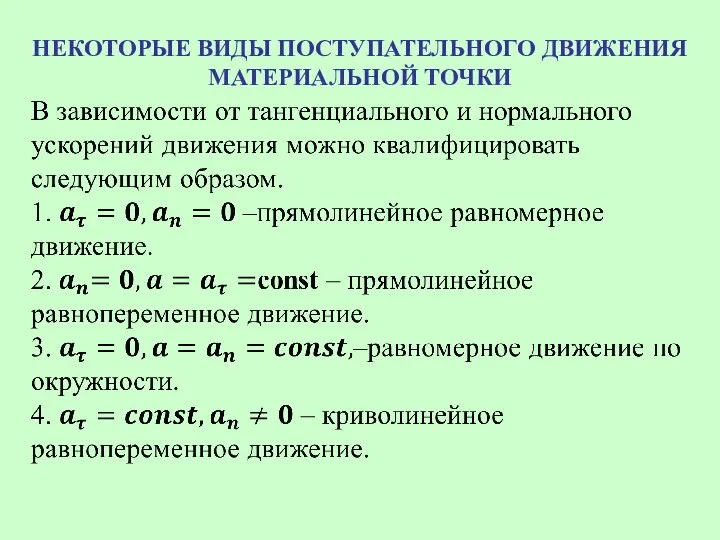
НЕКОТОРЫЕ ВИДЫ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
НЕКОТОРЫЕ ВИДЫ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
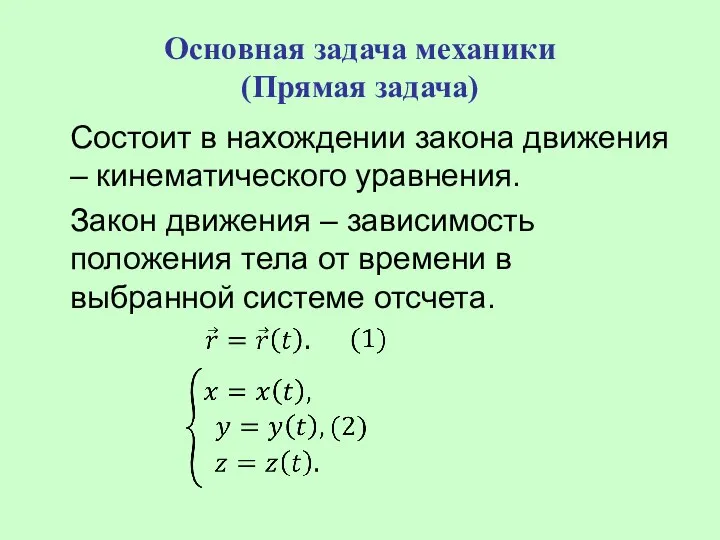
Слайд 30Основная задача механики
(Прямая задача)
Состоит в нахождении закона движения – кинематического уравнения.
Закон движения
Основная задача механики
(Прямая задача)
Состоит в нахождении закона движения – кинематического уравнения.
Закон движения
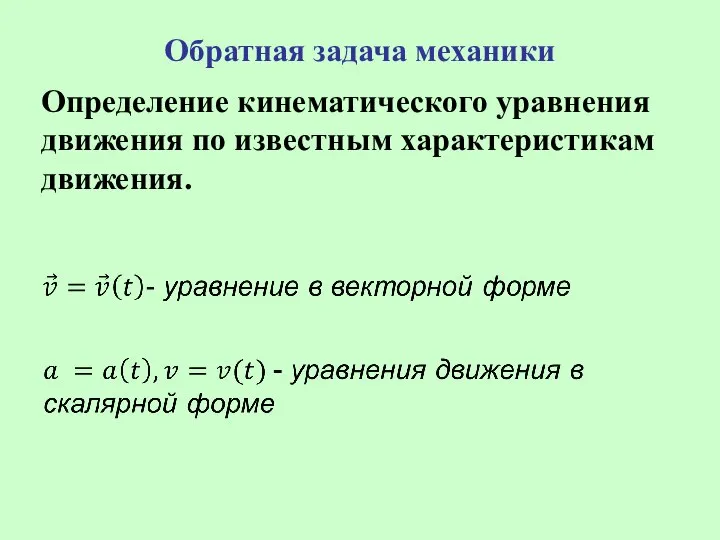
Слайд 31Обратная задача механики
Определение кинематического уравнения движения по известным характеристикам движения.
Обратная задача механики
Определение кинематического уравнения движения по известным характеристикам движения.
Слайд 32Понятие об абсолютно твердым телом (АТТ).
Поступательное и вращательное движение
Абсолютно твердое тело –
Понятие об абсолютно твердым телом (АТТ).
Поступательное и вращательное движение
Абсолютно твердое тело –
Слайд 33Поступательное движение – движение,
при котором любая прямая проведенная внутри тела, перемещается
Поступательное движение – движение,
при котором любая прямая проведенная внутри тела, перемещается
Слайд 34Абсолютно твердое тело
Поступательное движение АТТ можно рассматривать, как движение материальной точки.
Абсолютно твердое тело
Поступательное движение АТТ можно рассматривать, как движение материальной точки.
Слайд 35Кинематические уравнения.
1. Равномерное движение материальной точки вдоль оси x.
x0 – начальная координата.
2.
Кинематические уравнения.
1. Равномерное движение материальной точки вдоль оси x.
x0 – начальная координата.
2.
Слайд 36ЭНЕРГЕТИКА (параграфы 1.1.7, 1.1.8, 3.1 Методического навигатора)
Вращающиеся тела представляют большой интерес для
ЭНЕРГЕТИКА (параграфы 1.1.7, 1.1.8, 3.1 Методического навигатора) Вращающиеся тела представляют большой интерес для
Слайд 37Рабочее колесо турбины Красноярской ГЭС
Гидротурбина
Рабочее колесо паровой турбины
Рабочее колесо турбины Красноярской ГЭС
Гидротурбина
Рабочее колесо паровой турбины

Слайд 38Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки
Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки
Слайд 39В то же время радиус-вектор, соединяющий точки тела с осью вращения, за
В то же время радиус-вектор, соединяющий точки тела с осью вращения, за
Слайд 40Вектор элементарного угла поворота.
Вектор угловой скорости и углового перемещения.
Связь линейных и угловых
Вектор элементарного угла поворота. Вектор угловой скорости и углового перемещения. Связь линейных и угловых
Слайд 41Угловая скорость
– векторная величина, равная первой производной угла поворота по времени
Линейная
Угловая скорость
– векторная величина, равная первой производной угла поворота по времени
Линейная
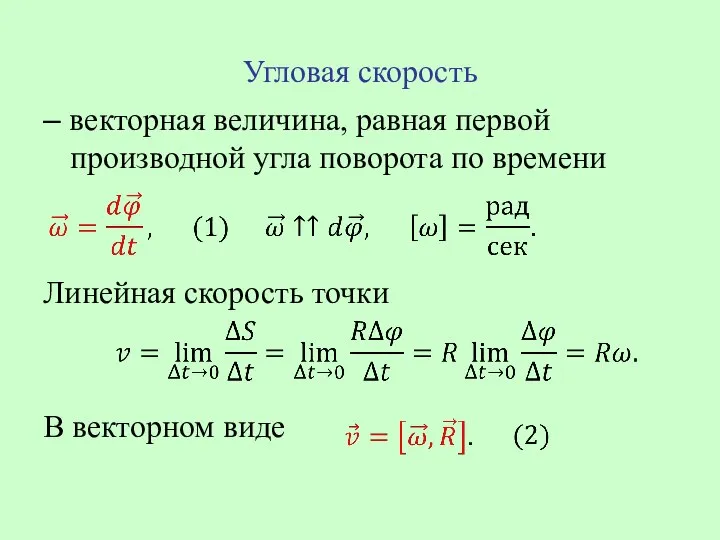
Слайд 42В векторном виде
В векторном виде
Слайд 43Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени
При
Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени
При
Слайд 44Кинематическое уравнение равномерного вращения
Частота вращения:
Период:
Кинематическое уравнение равномерного вращения
Частота вращения:
Период:
Слайд 45Кинематическое уравнение равнопеременного вращения
Длина пути, пройденного точкой по дуге радиуса R:
Кинематическое уравнение равнопеременного вращения
Длина пути, пройденного точкой по дуге радиуса R:
Слайд 46Связь линейных с угловыми величинами
Связь линейных с угловыми величинами
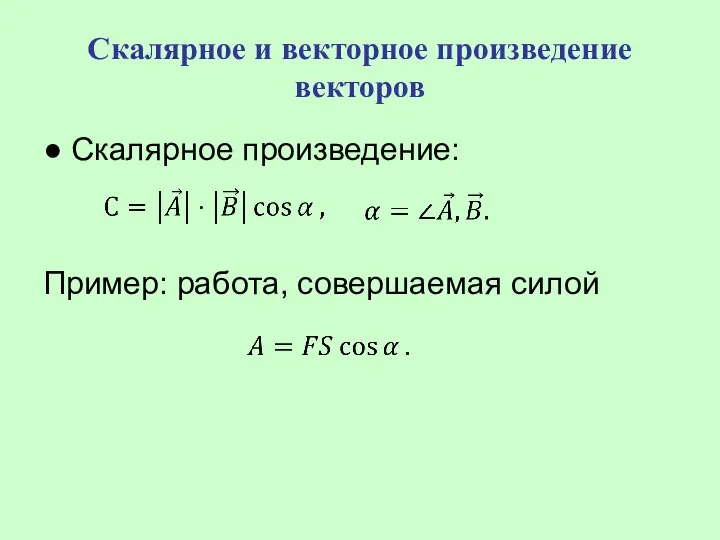
Слайд 47Скалярное и векторное произведение векторов
● Скалярное произведение:
Пример: работа, совершаемая силой
Скалярное и векторное произведение векторов
● Скалярное произведение:
Пример: работа, совершаемая силой
 Задача о железнодорожных составах
Задача о железнодорожных составах Из истории открытия закона всемирного тяготения…
Из истории открытия закона всемирного тяготения… Электризация тел. Взаимодействие заряженных тел. Два рода зарядов
Электризация тел. Взаимодействие заряженных тел. Два рода зарядов Развитие двигателя внутреннего сгорания
Развитие двигателя внутреннего сгорания Презентация на тему Шкала электромагнитных излучений
Презентация на тему Шкала электромагнитных излучений  Світловий промінь і світловий пучок. Закон прямолінійного поширення світла. Сонячне та місячне затемнення
Світловий промінь і світловий пучок. Закон прямолінійного поширення світла. Сонячне та місячне затемнення Звуковые волны
Звуковые волны Расчет состава и толщины слоев гетероструктуры, обеспечивающей необходимое оптическое и электронное ограничение
Расчет состава и толщины слоев гетероструктуры, обеспечивающей необходимое оптическое и электронное ограничение Внутренняя энергия и работа в термодинамике
Внутренняя энергия и работа в термодинамике Ядерные реакции и их воздействия
Ядерные реакции и их воздействия Электростатика. Основы электромеханики
Электростатика. Основы электромеханики Машинная игла. Уход за швейной машиной. Устранение дефектов машинной строчки
Машинная игла. Уход за швейной машиной. Устранение дефектов машинной строчки маятник. волны
маятник. волны Многофазные системы переменного тока. Преимущество трехфазной системы над однофазной
Многофазные системы переменного тока. Преимущество трехфазной системы над однофазной Изобретение радио
Изобретение радио Сверхпроводимость материалов
Сверхпроводимость материалов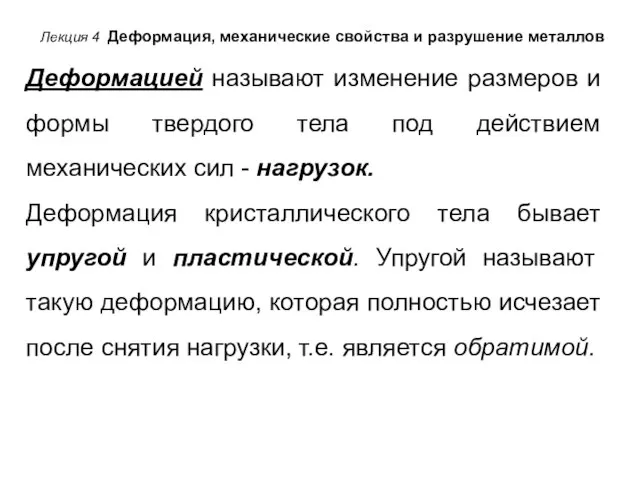 Деформация, механические свойства и разрушение металлов (Лекция 4)
Деформация, механические свойства и разрушение металлов (Лекция 4) Дирижаблестроение. Тема № 1
Дирижаблестроение. Тема № 1 Давление. Обозначение и единицы измерения давления
Давление. Обозначение и единицы измерения давления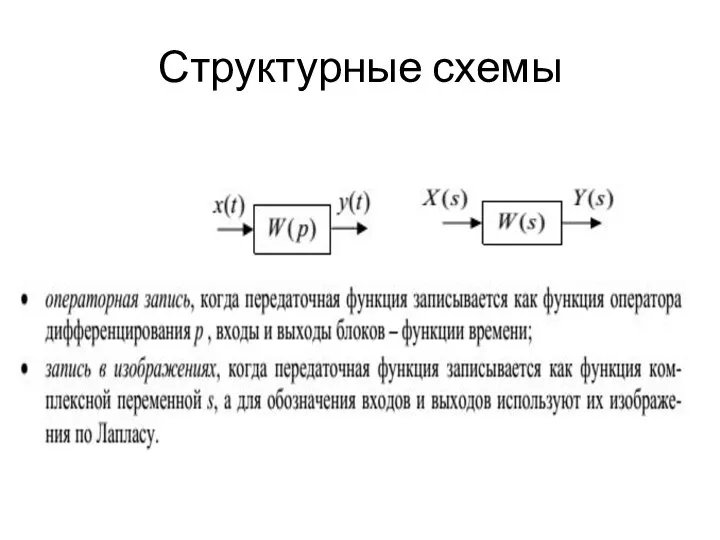 Структурные схемы. Правила преобразования. ТАУ 3-2
Структурные схемы. Правила преобразования. ТАУ 3-2 Лекция 1 Презентация Microsoft Office PowerPoint 2007
Лекция 1 Презентация Microsoft Office PowerPoint 2007 Физика атома и атомного ядра
Физика атома и атомного ядра Фотометрия и светотехника. ВИК - простая форма обучения
Фотометрия и светотехника. ВИК - простая форма обучения Электронные средства обучения
Электронные средства обучения Звук
Звук Наука о свете оптика/ (Лекция 31)
Наука о свете оптика/ (Лекция 31) Шкала Хаунсфилда
Шкала Хаунсфилда Сборка регулировка и испытание рулевого управления авто
Сборка регулировка и испытание рулевого управления авто