- Материальная точка

Содержание
- 2. тело, относительного которого задается или определяется положение выбранного тела Основная задача механики состоит в определении положения
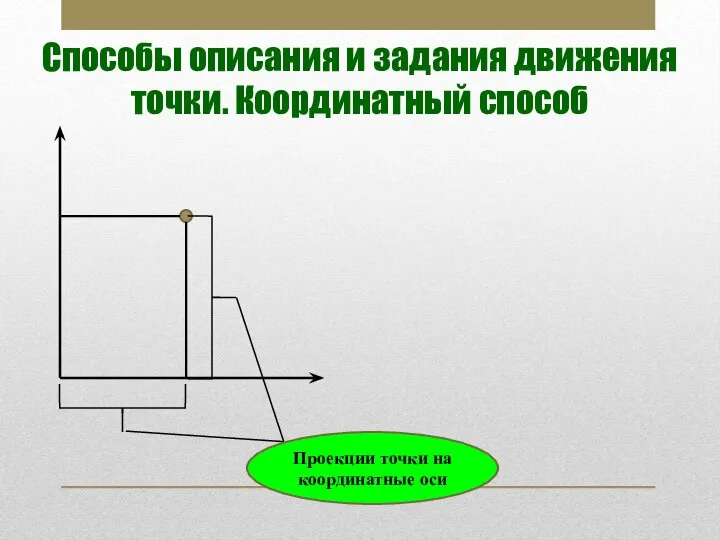
- 3. Способы описания и задания движения точки. Координатный способ Проекции точки на координатные оси
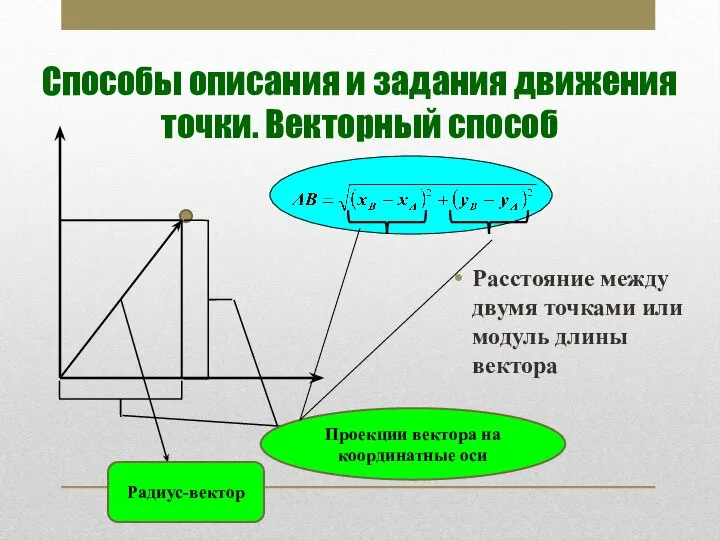
- 4. Способы описания и задания движения точки. Векторный способ Радиус-вектор Проекции вектора на координатные оси Расстояние между
- 5. Радиус-вектор вектор, соединяющий начало отсчета с положением точки в произвольный момент времени Проекция вектора положительна при
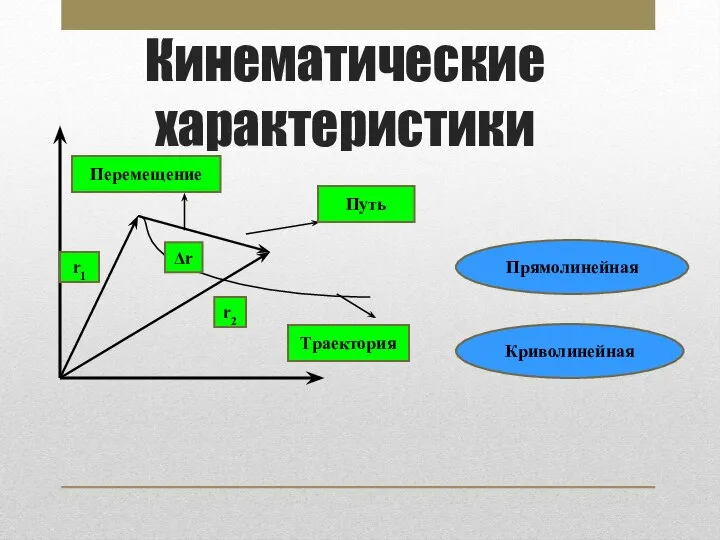
- 6. Кинематические характеристики r1 r2 Δr Прямолинейная Криволинейная
- 8. Скачать презентацию
Слайд 2тело, относительного которого задается или определяется положение выбранного тела
Основная задача механики состоит
тело, относительного которого задается или определяется положение выбранного тела
Основная задача механики состоит
Слайд 3Способы описания и задания движения точки. Координатный способ
Проекции точки на координатные оси
Способы описания и задания движения точки. Координатный способ
Проекции точки на координатные оси
Слайд 4Способы описания и задания движения точки. Векторный способ
Радиус-вектор
Проекции вектора на координатные оси
Расстояние
Способы описания и задания движения точки. Векторный способ
Радиус-вектор
Проекции вектора на координатные оси
Расстояние
Слайд 5Радиус-вектор
вектор, соединяющий начало отсчета с положением точки в произвольный момент времени
Проекция
Радиус-вектор
вектор, соединяющий начало отсчета с положением точки в произвольный момент времени
Проекция
Слайд 6Кинематические характеристики
r1
r2
Δr
Прямолинейная
Криволинейная
Кинематические характеристики
r1
r2
Δr
Прямолинейная
Криволинейная
 Нагрузки на балку. Расчет
Нагрузки на балку. Расчет Задача о движении внешней нагрузки по битому льду в канале
Задача о движении внешней нагрузки по битому льду в канале Презентация на тему Закон радиоактивного распада
Презентация на тему Закон радиоактивного распада  Теория вероятностей в задачах ЕГЭ
Теория вероятностей в задачах ЕГЭ Мощность. Единицы мощности
Мощность. Единицы мощности Сила тока. Измерение силы тока
Сила тока. Измерение силы тока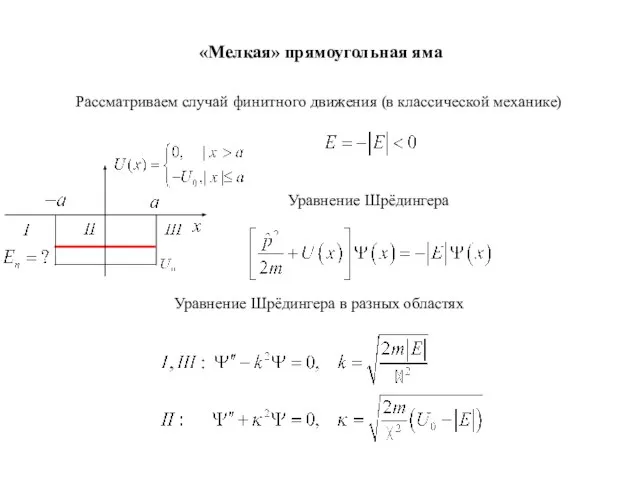 Мелкая прямоугольная яма
Мелкая прямоугольная яма Construcţia generală a tunului cal.152 mm 2A36. Mecanismele de ochire şi de echilibrare
Construcţia generală a tunului cal.152 mm 2A36. Mecanismele de ochire şi de echilibrare Закон изменения и сохранения импульса системы тел
Закон изменения и сохранения импульса системы тел Ratownicze zestawy pneumatyczne
Ratownicze zestawy pneumatyczne Термодинамика
Термодинамика Презентация на тему Что изучает физика (7 класс)
Презентация на тему Что изучает физика (7 класс)  Нанотехнологии вокруг нас
Нанотехнологии вокруг нас Определение, обозначение, единицы измерения равнодействующей сил
Определение, обозначение, единицы измерения равнодействующей сил Электрическое поле и его напряженность. Графическое изображение полей точечных зарядов
Электрическое поле и его напряженность. Графическое изображение полей точечных зарядов Электромагнитная индукция
Электромагнитная индукция Простые механизмы
Простые механизмы Презентация на тему Архимедова сила
Презентация на тему Архимедова сила  Силы трения между соприкасающимися поверхностями твердых тел
Силы трения между соприкасающимися поверхностями твердых тел Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями
Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями Механические колебания
Механические колебания 4. Силы в динамике
4. Силы в динамике Единая система допусков и посадок деталей и узлов машин, принципы её построения
Единая система допусков и посадок деталей и узлов машин, принципы её построения Тест по теме Электрический ток
Тест по теме Электрический ток Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Определение показателя преломления стекла. Лабораторная работа
Определение показателя преломления стекла. Лабораторная работа Законы сохранения в механике
Законы сохранения в механике Суперпроводники. История открытия
Суперпроводники. История открытия