- Механическое движение. Векторы

Содержание
- 2. Механика Основная задача механики: указать положение тела в любой момент времени. — это наука об общих
- 3. Исаак Ньютон 1642 — 1727 Некоторые достижения Ньютона: Первым объяснил движение небесных тел. Объяснил причину приливов
- 4. Основные определения кинематики 1. Материальная точка – тело размерами и формой которого можно пренебречь в условиях
- 5. Всякое сложное движение можно представить как сумму независимых простейших движений К простейшим движениям относятся поступательное и
- 6. Системы координат
- 7. Горизонтальная система координат Высота светила (h) – это угловое расстояние светила М от горизонта (измеряется в
- 8. Система отсчёта Тело отсчёта Часы Система координат Тело отсчёта — это физическое тело, относительно которого задаётся
- 9. Геоцентрическая и Гелиоцентрическая система мира
- 10. Положение точки в пространстве x z y Положение точки на плоскости задаётся двумя координатами, а положение
- 11. Перемещение Перемещением называется направленный отрезок, проведённый из начального положения тела в его конечное положение. Перемещение —
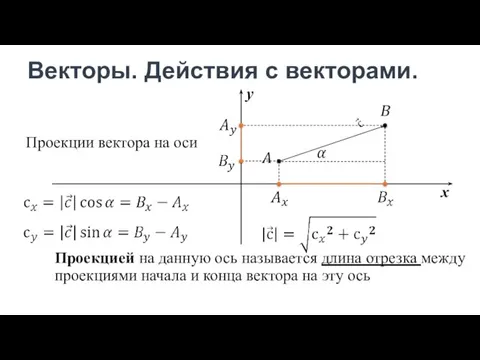
- 12. Векторы. Действия с векторами. Проекцией на данную ось называется длина отрезка между проекциями начала и конца
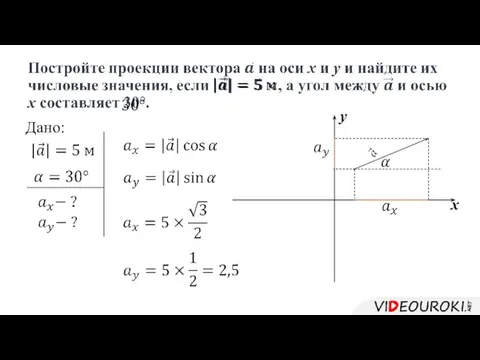
- 13. Дано: x y
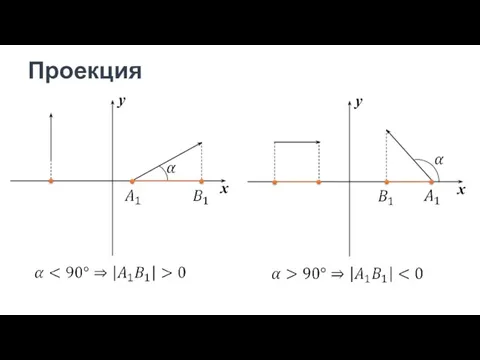
- 14. Проекция x y x y
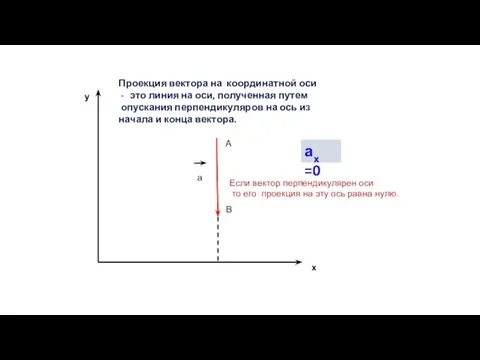
- 15. х у А В а Проекция вектора на координатной оси это линия на оси, полученная путем
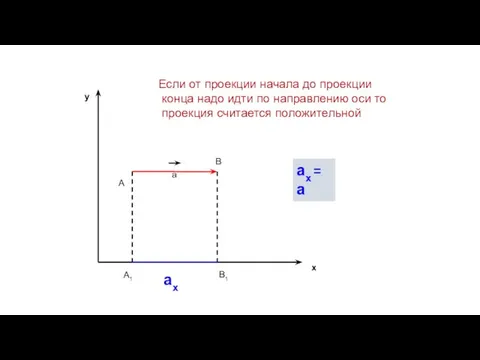
- 16. х у А В а А1 В1 ах Если от проекции начала до проекции конца надо
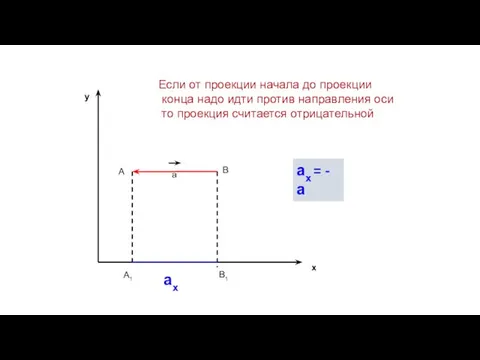
- 17. х у А В а А1 В1 ах Если от проекции начала до проекции конца надо
- 18. b Если модуль(числовое значение) и направление Векторов одинаковы то вектора считаются равными. Если модули(числовое значение) векторов
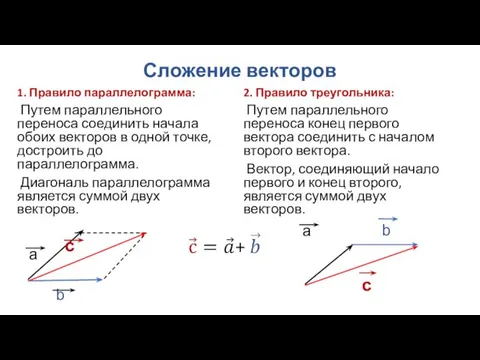
- 19. Сложение векторов 1. Правило параллелограмма: Путем параллельного переноса соединить начала обоих векторов в одной точке, достроить
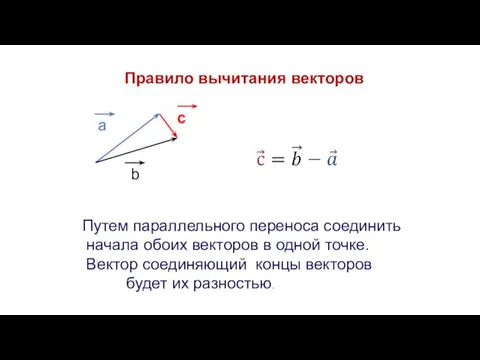
- 20. Правило вычитания векторов Путем параллельного переноса соединить начала обоих векторов в одной точке. Вектор соединяющий концы
- 22. Скачать презентацию

Слайд 3Исаак Ньютон
1642 — 1727
Некоторые достижения Ньютона:
Первым объяснил движение небесных тел.
Объяснил причину приливов
Исаак Ньютон
1642 — 1727
Некоторые достижения Ньютона:
Первым объяснил движение небесных тел.
Объяснил причину приливов
Слайд 4Основные определения кинематики
1. Материальная точка – тело размерами и формой которого можно
Основные определения кинематики
1. Материальная точка – тело размерами и формой которого можно
Слайд 5Всякое сложное движение можно представить как сумму независимых простейших движений
К простейшим
Всякое сложное движение можно представить как сумму независимых простейших движений
К простейшим
Слайд 6Системы координат
Системы координат

Слайд 7Горизонтальная система координат
Высота светила (h) – это угловое расстояние светила М от
Горизонтальная система координат
Высота светила (h) – это угловое расстояние светила М от

Слайд 8Система отсчёта
Тело отсчёта
Часы
Система координат
Тело отсчёта — это физическое тело, относительно которого задаётся
Система отсчёта
Тело отсчёта
Часы
Система координат
Тело отсчёта — это физическое тело, относительно которого задаётся

Слайд 9Геоцентрическая и Гелиоцентрическая система мира
Геоцентрическая и Гелиоцентрическая система мира

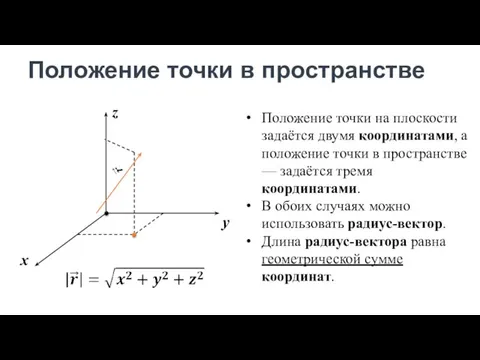
Слайд 10Положение точки в пространстве
x
z
y
Положение точки на плоскости задаётся двумя координатами, а положение
Положение точки в пространстве
x
z
y
Положение точки на плоскости задаётся двумя координатами, а положение
Слайд 11Перемещение
Перемещением называется направленный отрезок, проведённый из начального положения тела в его конечное
Перемещение
Перемещением называется направленный отрезок, проведённый из начального положения тела в его конечное

Слайд 12Векторы. Действия с векторами.
Проекцией на данную ось называется длина отрезка между проекциями
Векторы. Действия с векторами.
Проекцией на данную ось называется длина отрезка между проекциями
Слайд 13
Дано:
x
y
Дано:
x
y
Слайд 14Проекция
x
y
x
y
Проекция
x
y
x
y
Слайд 15х
у
А
В
а
Проекция вектора на координатной оси
это линия на оси, полученная путем
опускания перпендикуляров
х
у
А
В
а
Проекция вектора на координатной оси
это линия на оси, полученная путем
опускания перпендикуляров
Слайд 16х
у
А
В
а
А1
В1
ах
Если от проекции начала до проекции
конца надо идти по направлению оси
х
у
А
В
а
А1
В1
ах
Если от проекции начала до проекции
конца надо идти по направлению оси
Слайд 17х
у
А
В
а
А1
В1
ах
Если от проекции начала до проекции
конца надо идти против направления оси
х
у
А
В
а
А1
В1
ах
Если от проекции начала до проекции
конца надо идти против направления оси
Слайд 18b
Если модуль(числовое значение) и направление
Векторов одинаковы то вектора считаются равными.
Если модули(числовое значение)
b
Если модуль(числовое значение) и направление
Векторов одинаковы то вектора считаются равными.
Если модули(числовое значение)

Слайд 19Сложение векторов
1. Правило параллелограмма:
Путем параллельного переноса соединить начала обоих векторов в
Сложение векторов
1. Правило параллелограмма:
Путем параллельного переноса соединить начала обоих векторов в
Слайд 20Правило вычитания векторов
Путем параллельного переноса соединить
начала обоих векторов в одной точке.
Правило вычитания векторов
Путем параллельного переноса соединить
начала обоих векторов в одной точке.
 Алессандро Вольта - Электрическая батарея
Алессандро Вольта - Электрическая батарея Построение структур, обобщенные параметры, классификация и расчет составов ДНПКМ. Лекция 5
Построение структур, обобщенные параметры, классификация и расчет составов ДНПКМ. Лекция 5 Разработка и исследование системы управления технологического процесса с помощью термодинамических характеристик
Разработка и исследование системы управления технологического процесса с помощью термодинамических характеристик Сравнительная характеристика движения частиц
Сравнительная характеристика движения частиц Законы постоянного тока
Законы постоянного тока Самоиндукция. Определение
Самоиндукция. Определение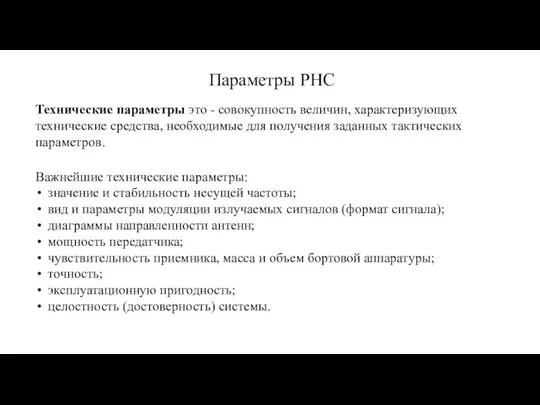 Радионавигация
Радионавигация Презентация на тему Перемещение при прямолинейном равноускоренном движении (9 класс)
Презентация на тему Перемещение при прямолинейном равноускоренном движении (9 класс)  Вынужденные колебания
Вынужденные колебания Электрические машины
Электрические машины Радиоволны. Рудольф Генрих
Радиоволны. Рудольф Генрих Задачи по физике
Задачи по физике Свободное падение
Свободное падение Уравнения материального баланса. Уравнение Бернулли, уравнение неразрывности
Уравнения материального баланса. Уравнение Бернулли, уравнение неразрывности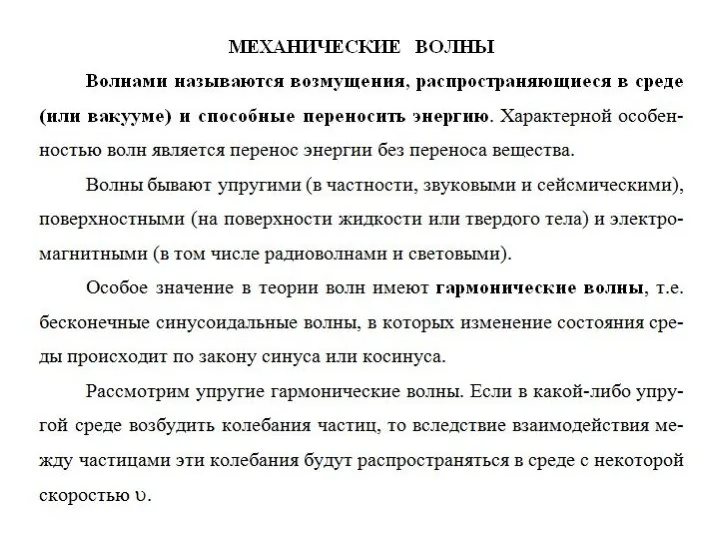 Механические волны
Механические волны Обзор доказательств ложности утверждений о возможности самосовершенствования
Обзор доказательств ложности утверждений о возможности самосовершенствования Электромагнитная индукция. Опыты Фарадея
Электромагнитная индукция. Опыты Фарадея Правила работы в кабинете физики
Правила работы в кабинете физики Механическое движение. Урок физики в 7 классе
Механическое движение. Урок физики в 7 классе Игра-соревнование Орешек знаний тверд
Игра-соревнование Орешек знаний тверд Материальная точка Путь. Перемещение СО
Материальная точка Путь. Перемещение СО Сплави з ефектом пам'яті форми
Сплави з ефектом пам'яті форми Наука физика
Наука физика Законы Ньютона
Законы Ньютона Разработка энергосберегающей технологии производства бисквита с плодоовощными добавками
Разработка энергосберегающей технологии производства бисквита с плодоовощными добавками Опорные конспекты по физике. Механика. 9 класс
Опорные конспекты по физике. Механика. 9 класс Сравнительная характеристика электрического тока в различных средах
Сравнительная характеристика электрического тока в различных средах Динамика. Лекция 2
Динамика. Лекция 2