- Определение скорости и ускорения точки

Содержание
- 2. Определение скорости при разных способах задания движения точки. Векторный способ задания движения точки
- 3. Координатный способ задания движения точки. rx=x, ry=y, rz=z x=f1(t), y=f2(t), z=f3(t).
- 4. Естественный способ задания движения точки S = f(t).
- 5. Определение ускорения. Касательное и нормальное ускорение точки Векторный способ задания движения точки
- 6. Координатный способ задания движения точки В декартовых координатах В полярных координатах х= r∙соsφ, у= r∙sinφ. ax=x=rcosφ
- 7. Естественный способ задания движения точки
- 10. Скачать презентацию
Слайд 2Определение скорости при разных способах задания движения точки.
Векторный способ задания движения точки
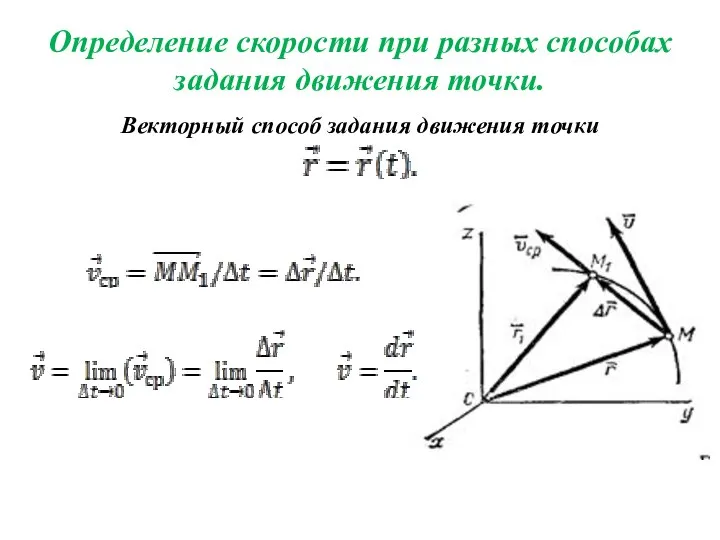
Определение скорости при разных способах задания движения точки.
Векторный способ задания движения точки
Слайд 3Координатный способ задания движения точки.
rx=x, ry=y, rz=z
x=f1(t), y=f2(t), z=f3(t).
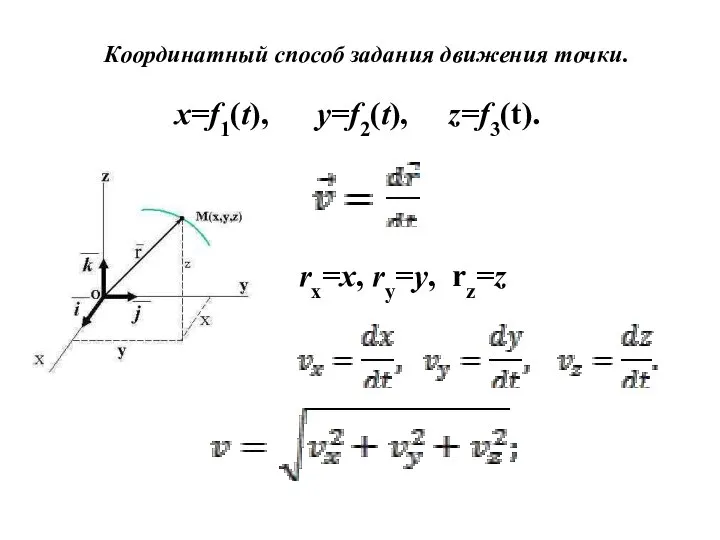
Координатный способ задания движения точки.
rx=x, ry=y, rz=z
x=f1(t), y=f2(t), z=f3(t).
Слайд 4Естественный способ задания движения точки
S = f(t).
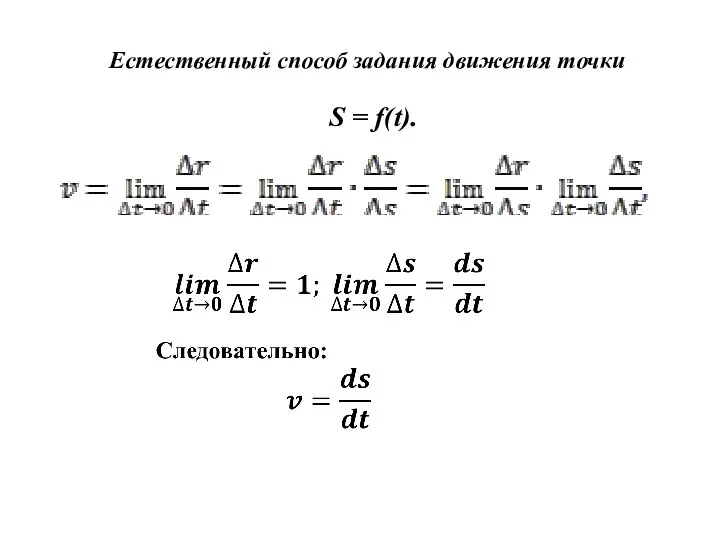
Естественный способ задания движения точки
S = f(t).
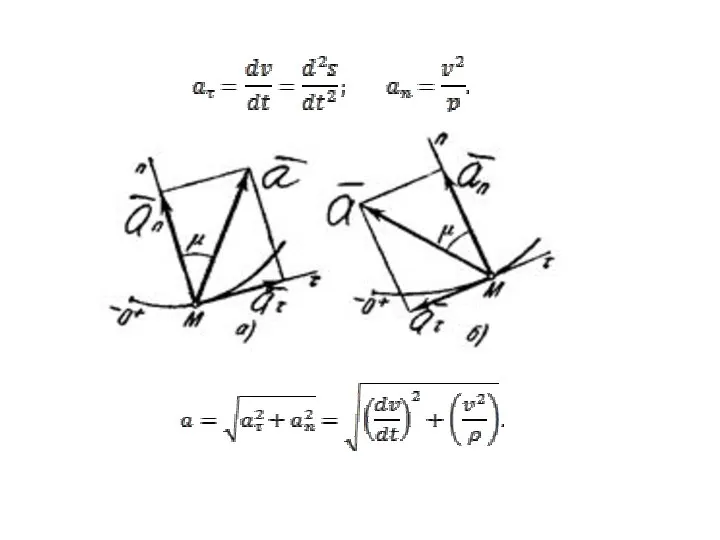
Слайд 5Определение ускорения. Касательное и нормальное ускорение точки
Векторный способ задания движения точки
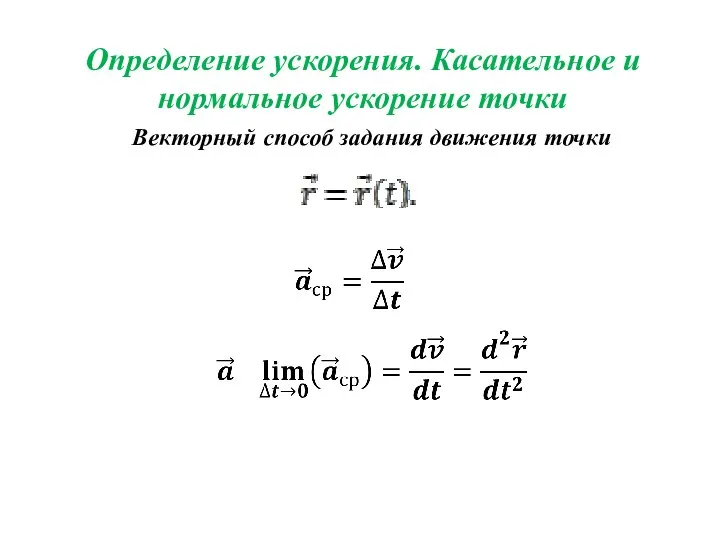
Определение ускорения. Касательное и нормальное ускорение точки
Векторный способ задания движения точки
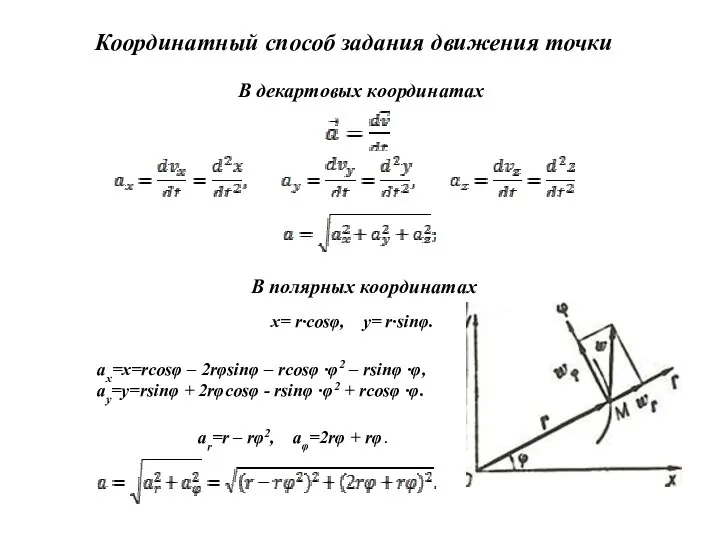
Слайд 6Координатный способ задания движения точки
В декартовых координатах
В полярных координатах
х= r∙соsφ, у= r∙sinφ.
ax=x=rcosφ – 2rφsinφ – rcosφ ∙φ2 – rsinφ ∙φ,
ay=y=rsinφ + 2rφcosφ - rsinφ ∙φ2 + rcosφ ∙φ.
ar=r – rφ2, aφ=2rφ + rφ.
Координатный способ задания движения точки
В декартовых координатах
В полярных координатах
х= r∙соsφ, у= r∙sinφ.
ax=x=rcosφ – 2rφsinφ – rcosφ ∙φ2 – rsinφ ∙φ,
ay=y=rsinφ + 2rφcosφ - rsinφ ∙φ2 + rcosφ ∙φ.
ar=r – rφ2, aφ=2rφ + rφ.
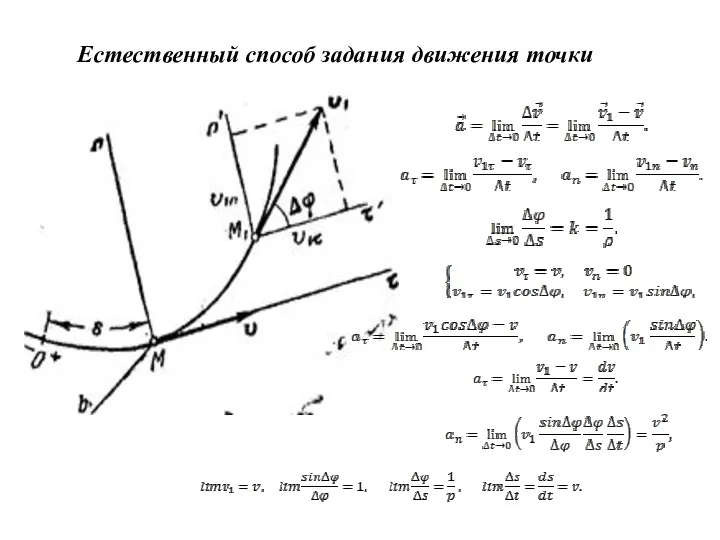
Слайд 7Естественный способ задания движения точки
Естественный способ задания движения точки
 Разработкой технологии дефектации прибора системы зажигания автомобиля ГАЗ-2752 Газель
Разработкой технологии дефектации прибора системы зажигания автомобиля ГАЗ-2752 Газель Рабочие вещества холодильных машин и тепловых насосов
Рабочие вещества холодильных машин и тепловых насосов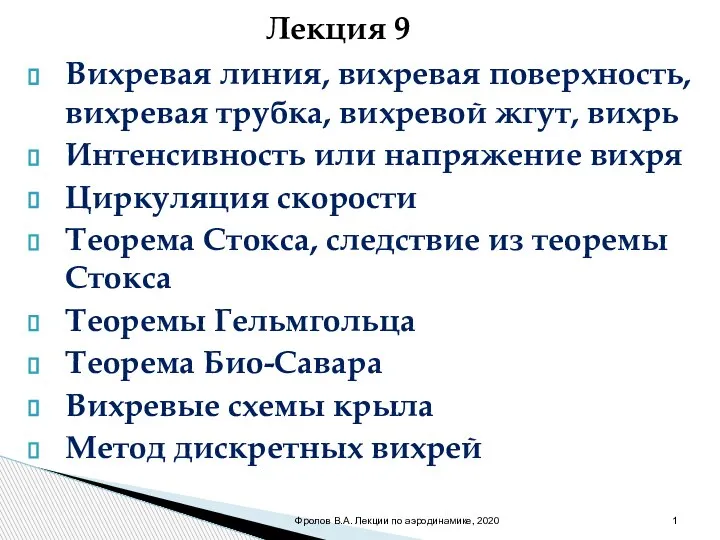 Вихревая линия, вихревая поверхность, вихревая трубка, вихревой жгут, вихрь
Вихревая линия, вихревая поверхность, вихревая трубка, вихревой жгут, вихрь Электропроводность полупроводников и её виды
Электропроводность полупроводников и её виды Детали механизмов и машин. Лекция № 2
Детали механизмов и машин. Лекция № 2 Вспомогательные системы тепловозов
Вспомогательные системы тепловозов Аморфные тела
Аморфные тела Тяга. Ма́ятник
Тяга. Ма́ятник Фотоэлектрические явления
Фотоэлектрические явления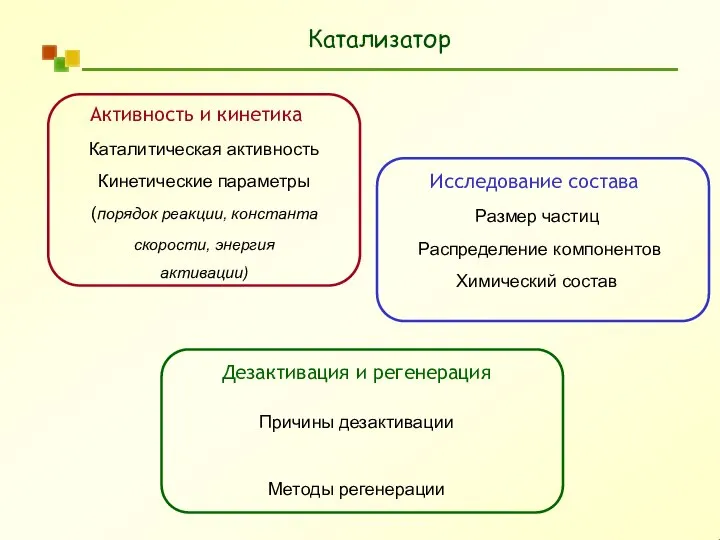 Катализатор. Анализ кинетических данных
Катализатор. Анализ кинетических данных Механизм натяжения сетки. Часть 1
Механизм натяжения сетки. Часть 1 Қызыл спрайт
Қызыл спрайт Международная система единиц. Единство измерений. Лекция № 2
Международная система единиц. Единство измерений. Лекция № 2 Использование электромагнитной индукции
Использование электромагнитной индукции Закон радиоактивного распада. Период полураспада
Закон радиоактивного распада. Период полураспада Процесстер мен аппараттар
Процесстер мен аппараттар Презентация на тему: основы термодинамики
Презентация на тему: основы термодинамики Школа юного исследователя
Школа юного исследователя Аксиомы статики
Аксиомы статики Тема 1. Материя. Проект: Путёвка в жизнь
Тема 1. Материя. Проект: Путёвка в жизнь Общие сведения об элементах систем
Общие сведения об элементах систем Механическое движение. Урок физики в 7 классе
Механическое движение. Урок физики в 7 классе Классификация тепловых двигателей
Классификация тепловых двигателей Ситникова Надежда Александровна, Бормотова Ольга Владимировна, учителя физики БОУ СОШ № 10 МО Динской район
Ситникова Надежда Александровна, Бормотова Ольга Владимировна, учителя физики БОУ СОШ № 10 МО Динской район Механическое движение
Механическое движение Познавательнотематическое развлечение Течёт река…
Познавательнотематическое развлечение Течёт река… Общая Физика. Оптика
Общая Физика. Оптика Презентация на тему Графическое представление газовых процессов
Презентация на тему Графическое представление газовых процессов