- Пространственная система сил

Содержание
- 2. Студент должен: иметь представление: - о пространственных системах сил и их действии на тело.
- 3. Знать: - момент силы относительно оси, свойства момента; - аналитический способ определения равнодействующей; -условия равновесия.
- 4. Уметь: -выполнять разложение силы на три взаимно перпендикулярные оси; -определять момент силы относительно оси; -определять реакции
- 5. Пространственная система сил- система сил, линии действия которых расположены в различных плоскостях.
- 6. 1. Пространственная системой сходящихся сил (пространственный пучок сил) Пространственная система сил называется сходящейся, если линии действия
- 7. Теорема о равнодействующей пространственной ССС. Пространственная система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих
- 8. Способы определения равнодействующей силы пространственной системы сходящихся сил: Силовой многоугольник пространственной системы сил не лежит в
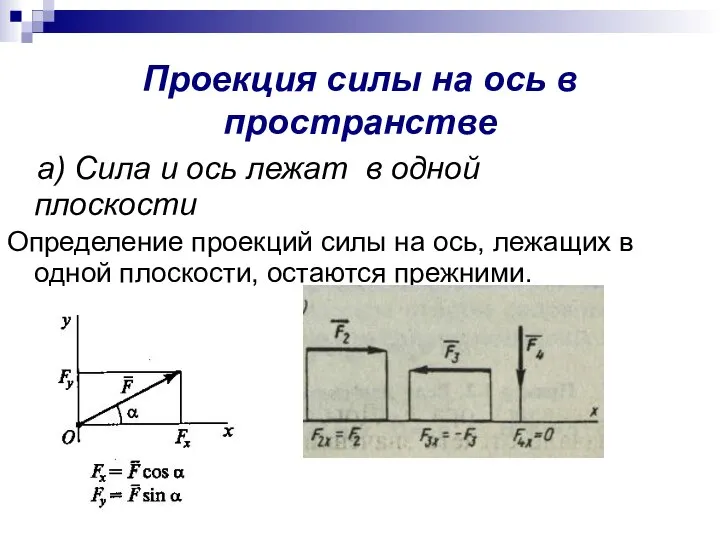
- 9. Проекция силы на ось в пространстве а) Сила и ось лежат в одной плоскости Определение проекций
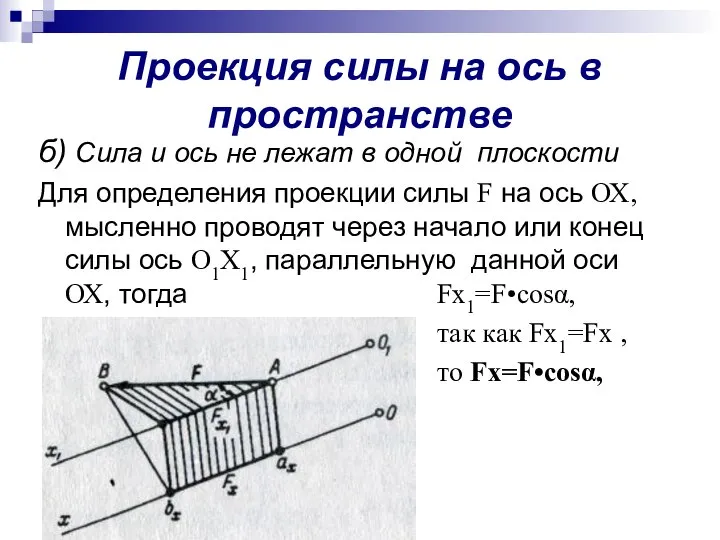
- 10. Проекция силы на ось в пространстве б) Сила и ось не лежат в одной плоскости Для
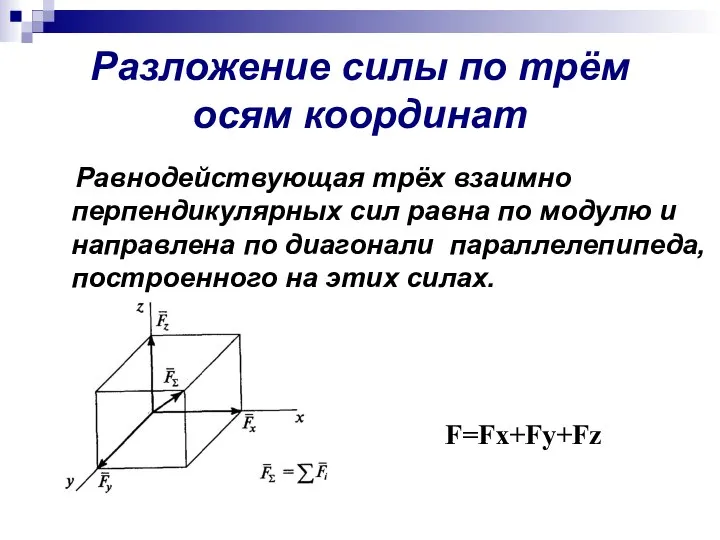
- 11. Разложение силы по трём осям координат Равнодействующая трёх взаимно перпендикулярных сил равна по модулю и направлена
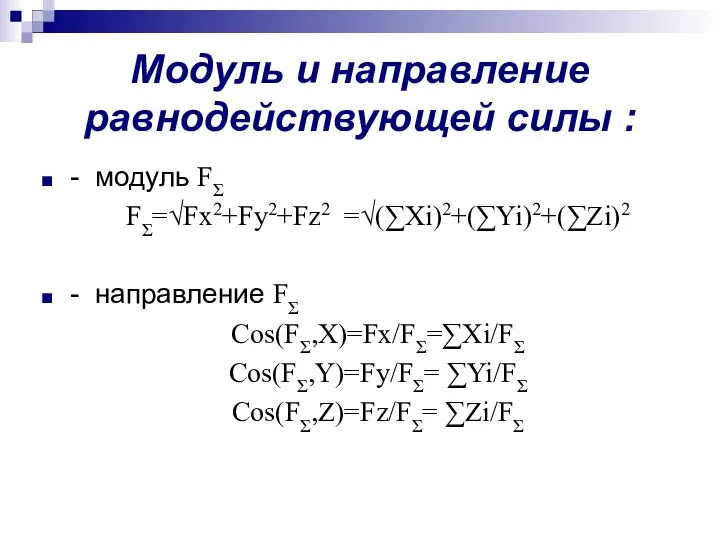
- 12. Модуль и направление равнодействующей силы : - модуль FƩ FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2 - направление FƩ Cos(FƩ,X)=Fx/FƩ=∑Xi/FƩ Cos(FƩ,Y)=Fy/FƩ=
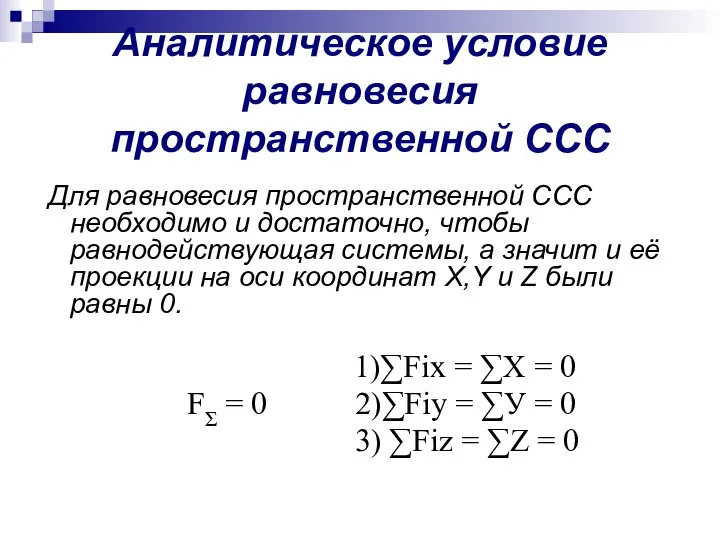
- 13. Аналитическое условие равновесия пространственной ССС Для равновесия пространственной ССС необходимо и достаточно, чтобы равнодействующая системы, а
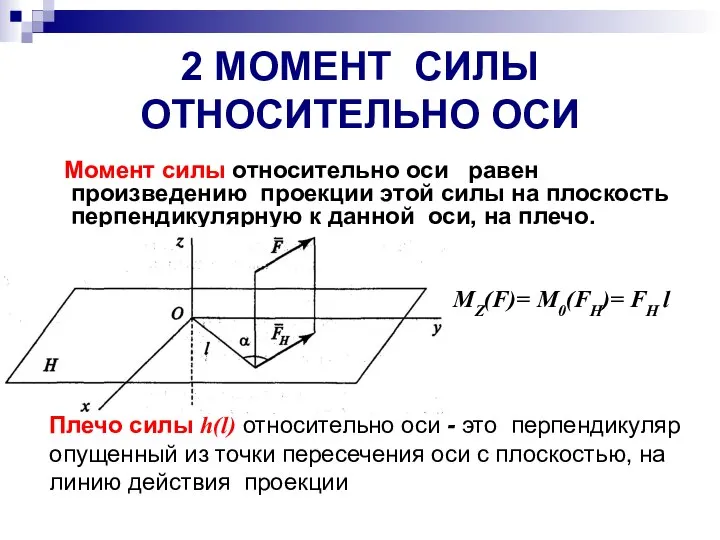
- 14. 2 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ Момент силы относительно оси равен произведению проекции этой силы на плоскость
- 15. Правило знаков Момент силы относительно оси будем считать положительным , если сила стремится вызвать вращение против
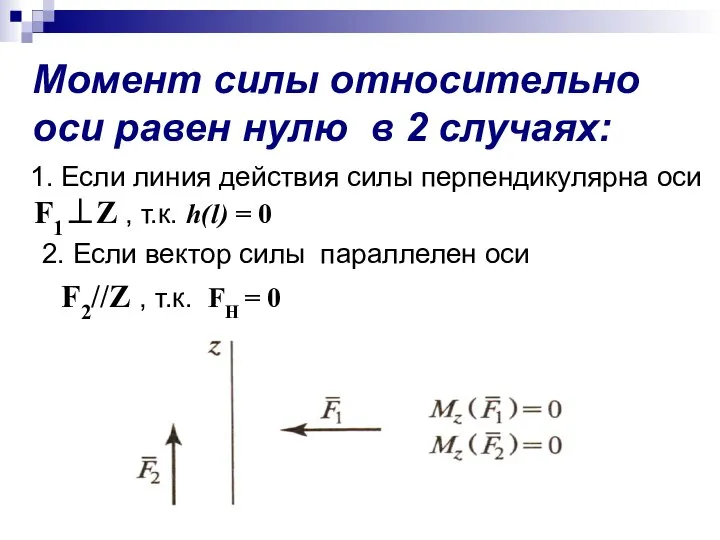
- 16. Момент силы относительно оси равен нулю в 2 случаях: 1. Если линия действия силы перпендикулярна оси
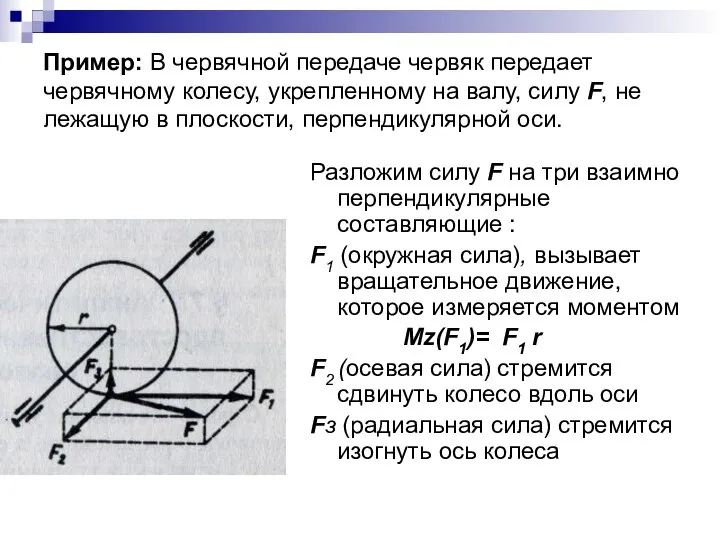
- 17. Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу, силу F, не лежащую в
- 18. 3. Пространственная система произвольно расположенных сил - это система сил, линии действия, которых не лежат в
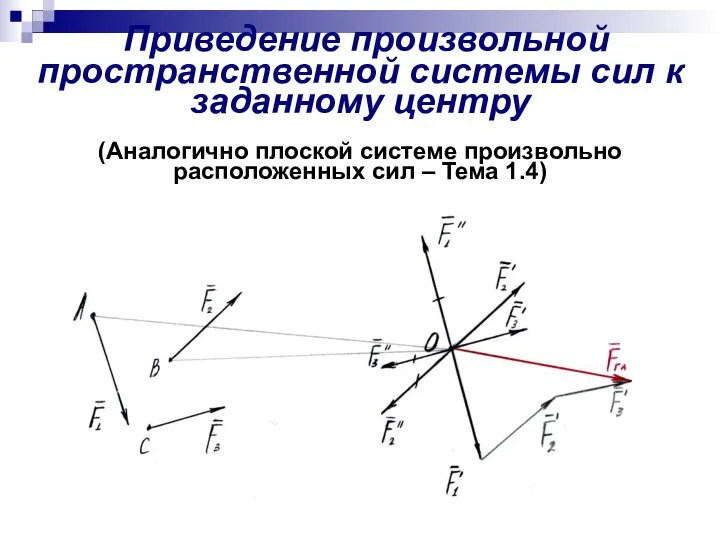
- 19. Приведение произвольной пространственной системы сил к заданному центру (Аналогично плоской системе произвольно расположенных сил – Тема
- 20. Приведение произвольной пространственной системы сил к заданному центру Пространственная система произвольно расположенных сил в общем случае
- 21. Модуль и направление главного вектора : - модуль FГЛ FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2 - направление FГЛ Cos(Fгл; x)=
- 22. Модуль главного момента : Алгебраическая сумма моментов всех сил системы относительно каждой оси. МГЛ = √
- 23. Аналитические условия равновесия пространственной системы произвольно расположенных сил Алгебраическая сумма проекций всех сил на три взаимно
- 25. Скачать презентацию
Слайд 3
Знать:
- момент силы относительно оси, свойства момента;
- аналитический способ определения равнодействующей;
-условия
Знать: - момент силы относительно оси, свойства момента; - аналитический способ определения равнодействующей; -условия
Слайд 4
Уметь:
-выполнять разложение силы на три взаимно перпендикулярные оси;
-определять момент силы относительно оси;
-определять
Уметь: -выполнять разложение силы на три взаимно перпендикулярные оси; -определять момент силы относительно оси; -определять
Слайд 5Пространственная
система сил-
система сил, линии действия которых расположены в различных
Пространственная
система сил-
система сил, линии действия которых расположены в различных
Слайд 61. Пространственная системой сходящихся сил (пространственный пучок сил)
Пространственная система сил называется сходящейся,
1. Пространственная системой сходящихся сил (пространственный пучок сил)
Пространственная система сил называется сходящейся,

Слайд 7Теорема о равнодействующей пространственной ССС.
Пространственная система сходящихся сил эквивалентна равнодействующей, которая
Теорема о равнодействующей пространственной ССС. Пространственная система сходящихся сил эквивалентна равнодействующей, которая
Слайд 8Способы определения равнодействующей силы пространственной системы сходящихся сил:
Силовой многоугольник пространственной системы
Способы определения равнодействующей силы пространственной системы сходящихся сил:
Силовой многоугольник пространственной системы
Слайд 9Проекция силы на ось в пространстве
а) Сила и ось лежат в
Проекция силы на ось в пространстве
а) Сила и ось лежат в
Слайд 10Проекция силы на ось в пространстве
б) Сила и ось не лежат в
Проекция силы на ось в пространстве
б) Сила и ось не лежат в
Слайд 11Разложение силы по трём осям координат
Равнодействующая трёх взаимно перпендикулярных сил равна
Разложение силы по трём осям координат
Равнодействующая трёх взаимно перпендикулярных сил равна
Слайд 12Модуль и направление равнодействующей силы :
- модуль FƩ
FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
- направление
Модуль и направление равнодействующей силы :
- модуль FƩ
FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
- направление
Слайд 13Аналитическое условие равновесия пространственной ССС
Для равновесия пространственной ССС необходимо и
Аналитическое условие равновесия пространственной ССС
Для равновесия пространственной ССС необходимо и
Слайд 142 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Момент силы относительно оси равен произведению проекции
2 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Момент силы относительно оси равен произведению проекции
Слайд 15Правило знаков
Момент силы относительно оси будем считать положительным , если
Правило знаков
Момент силы относительно оси будем считать положительным , если
Слайд 16Момент силы относительно оси равен нулю в 2 случаях:
1. Если линия
Момент силы относительно оси равен нулю в 2 случаях:
1. Если линия
Слайд 17Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу, силу
Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу, силу
Слайд 18
3. Пространственная система произвольно расположенных сил -
это система сил, линии действия,
3. Пространственная система произвольно расположенных сил -
это система сил, линии действия,
Слайд 19
Приведение произвольной пространственной системы сил к заданному центру
(Аналогично плоской системе
Приведение произвольной пространственной системы сил к заданному центру (Аналогично плоской системе
Слайд 20
Приведение произвольной пространственной системы сил к заданному центру
Пространственная система
Приведение произвольной пространственной системы сил к заданному центру
Пространственная система
Слайд 21Модуль и направление главного вектора :
- модуль FГЛ
FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
- направление
Модуль и направление главного вектора :
- модуль FГЛ
FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
- направление
Слайд 22Модуль главного момента :
Алгебраическая сумма моментов всех сил системы относительно каждой оси.
МГЛ
Модуль главного момента :
Алгебраическая сумма моментов всех сил системы относительно каждой оси.
МГЛ
Слайд 23
Аналитические условия равновесия пространственной системы
произвольно расположенных сил
Алгебраическая сумма проекций всех
Аналитические условия равновесия пространственной системы
произвольно расположенных сил
Алгебраическая сумма проекций всех
 Плотность. Плотность мрамора
Плотность. Плотность мрамора Алгоритм решения задач на определение к.п.д. теплового цикла по графику зависимости давления от объема
Алгоритм решения задач на определение к.п.д. теплового цикла по графику зависимости давления от объема Тепло и температура
Тепло и температура Тепловые явления. Изменение агрегатных состояний вещества
Тепловые явления. Изменение агрегатных состояний вещества Асинхронные машины. Лекция 13
Асинхронные машины. Лекция 13 Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7)
Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7) Первые предсказания погоды. Отто фон Герике. Барометр
Первые предсказания погоды. Отто фон Герике. Барометр Презентация на тему Колебания и волны
Презентация на тему Колебания и волны  ДМА – динамически механический анализ
ДМА – динамически механический анализ Строение атома. Опыты Резерфорда
Строение атома. Опыты Резерфорда Фрактальная размерность проводников и полупроводников
Фрактальная размерность проводников и полупроводников Выполнение работ на сверлильных, токарных фрезерных копировальных, шпоночных и шлифовальных станках
Выполнение работ на сверлильных, токарных фрезерных копировальных, шпоночных и шлифовальных станках От древних источников света до современной лампочки
От древних источников света до современной лампочки Научное открытие России: Гравитационные волны
Научное открытие России: Гравитационные волны Презентация на тему Абрам Федорович Иоффе
Презентация на тему Абрам Федорович Иоффе  Электростатическое поле в вакууме
Электростатическое поле в вакууме Tlaková sila. Tlak
Tlaková sila. Tlak мбф
мбф Хот-роды
Хот-роды IRS-P6 - усовершенствованный спутник дистанционного зондирования
IRS-P6 - усовершенствованный спутник дистанционного зондирования Осциллограф
Осциллограф Изучение тепловых явлений. 8 класс
Изучение тепловых явлений. 8 класс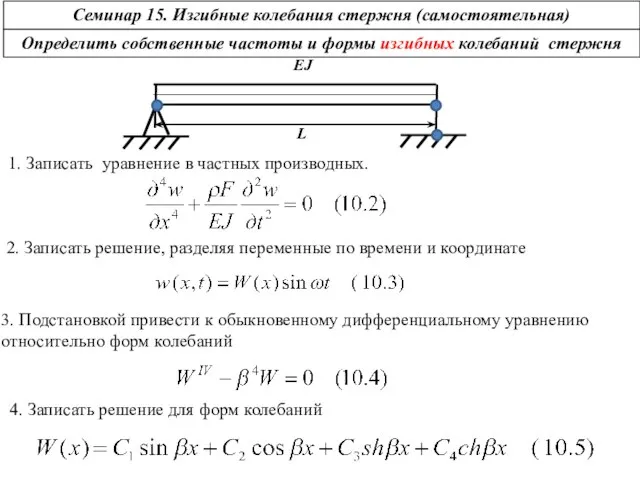 Семинар 15. Изгибные колебания стержня (самостоятельная)
Семинар 15. Изгибные колебания стержня (самостоятельная) Электрическая цепь. Электротехнические материалы и изделия
Электрическая цепь. Электротехнические материалы и изделия Лекция 6 нелинейные электрические цепи постоянного тока
Лекция 6 нелинейные электрические цепи постоянного тока Приближения и упрощения
Приближения и упрощения Излучение и поглощение электромагнитных волн в среде. (Лекция 2)
Излучение и поглощение электромагнитных волн в среде. (Лекция 2) Конструирование и прототипирование прокатной клети ДУО 65
Конструирование и прототипирование прокатной клети ДУО 65