- Радионавигация

Содержание
- 2. Параметры РНС В системах, определяющих МП, применяется удвоенная СКП определения местоположения (2drms), представляющая собой радиус окружности,
- 3. Параметры РНС Вводят следующие определения точности: прогнозируемая точность - точность местоопределения по отношению к истинному положению
- 4. Параметры РНС Эксплуатационная пригодность (называемая иногда доступностью) - вероятность того, что в любое время и в
- 5. Классификация радионавигационных устройств и систем Назначение характеризует класс навигационных задач, для решения которых служит РНС. В
- 6. Классификация радионавигационных устройств и систем
- 7. Классификация радионавигационных устройств и систем Системы сближения и стыковки (причаливания) предназначены для получения информации о взаимном
- 8. Классификация радионавигационных устройств и систем Характер источника информативного сигнала влияет на структуру РНС и в зависимости
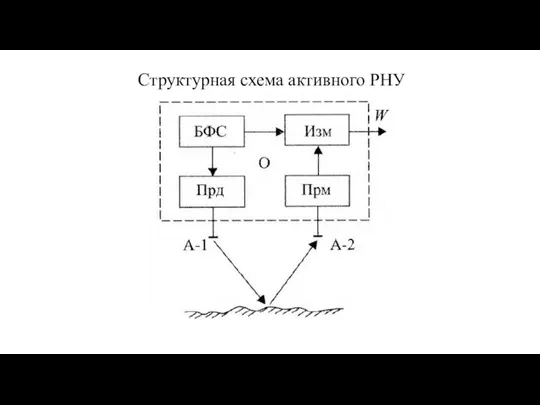
- 9. Структурная схема активного РНУ
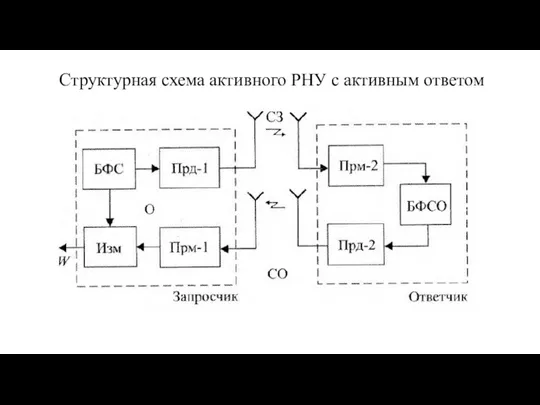
- 10. Структурная схема активного РНУ с активным ответом
- 11. Структурная схема пассивного РНУ
- 12. Структурная схема пассивной многопозиционной РНС
- 13. Классификация радионавигационных устройств и систем Вид навигационного параметра W влияет на форму поверхностей и линий положения,
- 14. Классификация радионавигационных устройств и систем Угломерные РНУ относятся к классу пассивных устройств и определяют W, представляющий
- 15. Вид информативного параметра сигнала где и В зависимости от того, какой параметр принимаемого на РНУ сигнала
- 16. Классификация радионавигационных устройств и систем Степень автономности определяет возможность использования РНУ или РНС для навигации на
- 17. Дальность действия и точность РНУ и РНС Одна из основных задач при проектировании РНУ или РНС
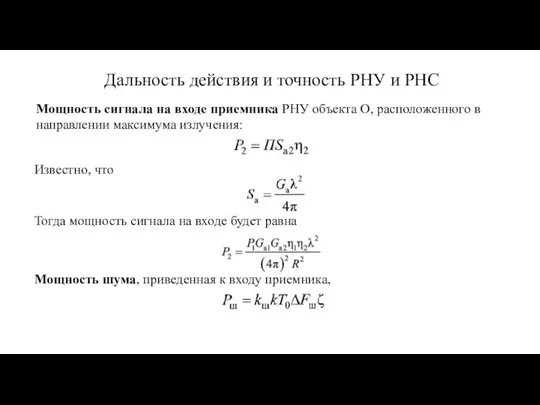
- 18. Дальность действия и точность РНУ и РНС Мощность сигнала на входе приемника РНУ объекта О, расположенного
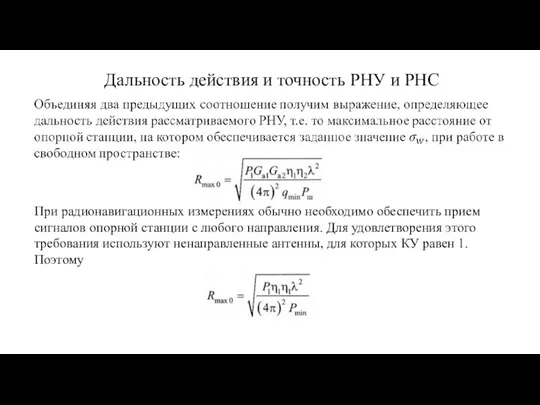
- 19. Дальность действия и точность РНУ и РНС При радионавигационных измерениях обычно необходимо обеспечить прием сигналов опорной
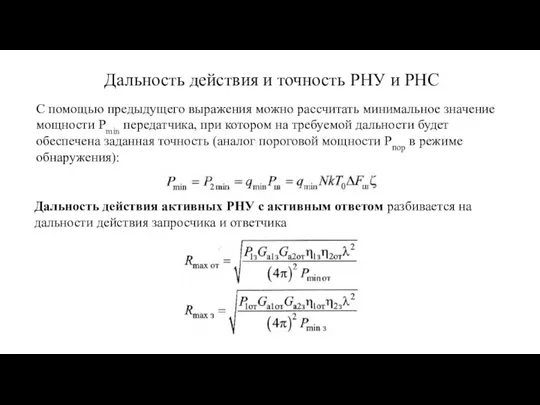
- 20. Дальность действия и точность РНУ и РНС С помощью предыдущего выражения можно рассчитать минимальное значение мощности
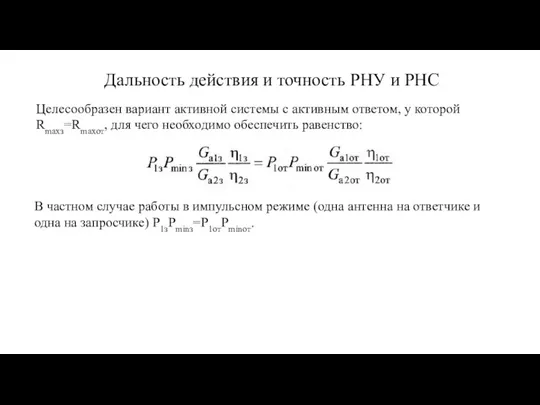
- 21. Дальность действия и точность РНУ и РНС Целесообразен вариант активной системы с активным ответом, у которой
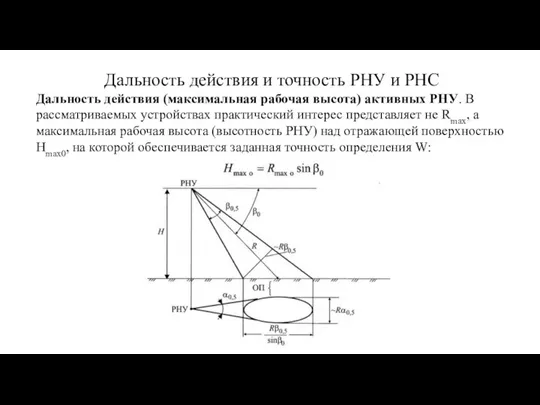
- 22. Дальность действия и точность РНУ и РНС Дальность действия (максимальная рабочая высота) активных РНУ. В рассматриваемых
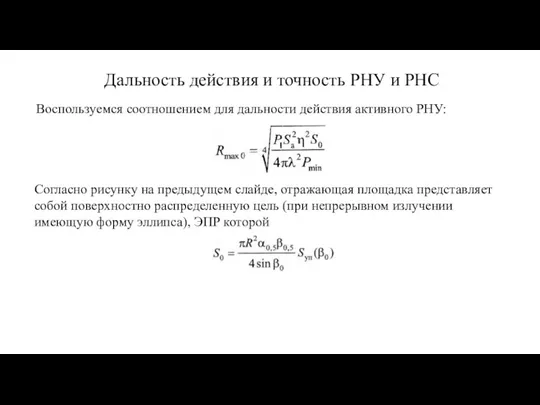
- 23. Дальность действия и точность РНУ и РНС Воспользуемся соотношением для дальности действия активного РНУ: Согласно рисунку
- 24. Дальность действия и точность РНУ и РНС Используя приближенную формулу и соотношения, определенные раннее, получим
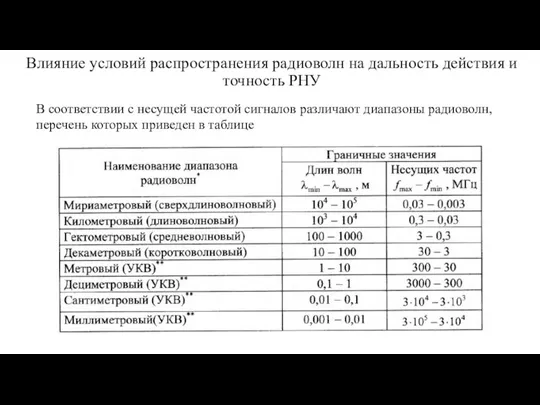
- 25. Влияние условий распространения радиоволн на дальность действия и точность РНУ В соответствии с несущей частотой сигналов
- 26. Траектории радиоволн различных типов В зависимости от вида траектории распространения различают четыре характерных типа радиоволн: тропосферные
- 27. Тропосферные волны (ТВ) Дальность прямой видимости: ОТ - область тени; Rз= 6370 км - физический радиус
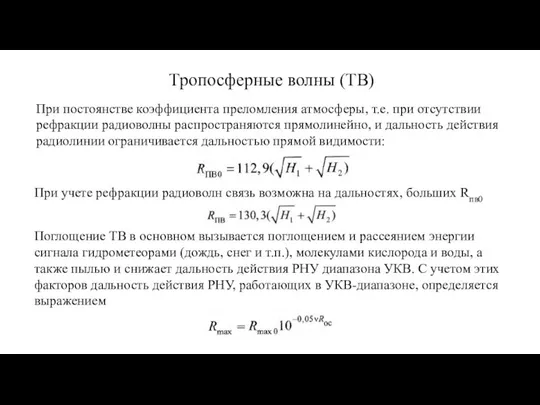
- 28. Тропосферные волны (ТВ) При постоянстве коэффициента преломления атмосферы, т.е. при отсутствии рефракции радиоволны распространяются прямолинейно, и
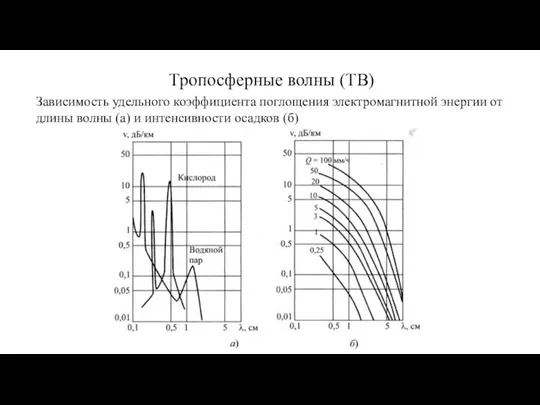
- 29. Тропосферные волны (ТВ) Зависимость удельного коэффициента поглощения электромагнитной энергии от длины волны (а) и интенсивности осадков
- 30. Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ Отражение радиоволны от земной поверхности
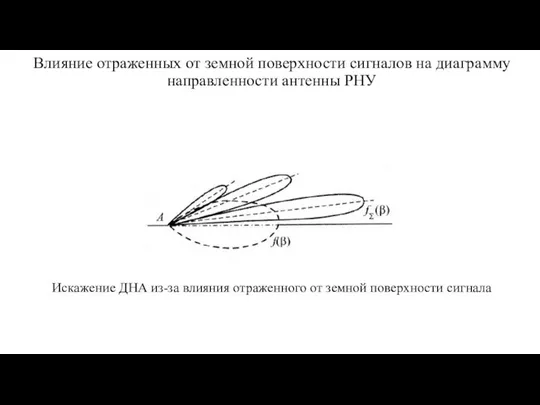
- 31. Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ Искажение ДНА из-за влияния отраженного
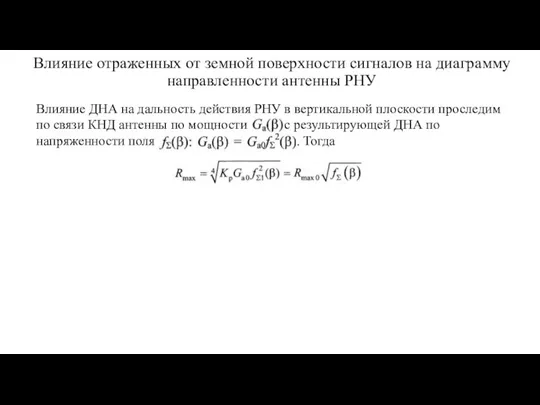
- 32. Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ Влияние ДНА на дальность действия
- 33. Поверхностные волны (ПВ) Поверхностными называют радиоволны, которые распространяются в непосредственной близости к поверхности Земли и огибают
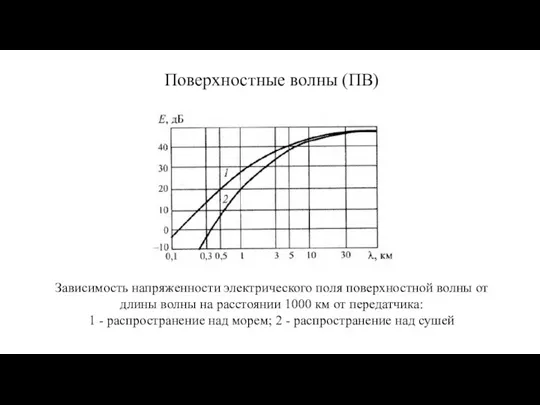
- 34. Поверхностные волны (ПВ) Зависимость напряженности электрического поля поверхностной волны от длины волны на расстоянии 1000 км
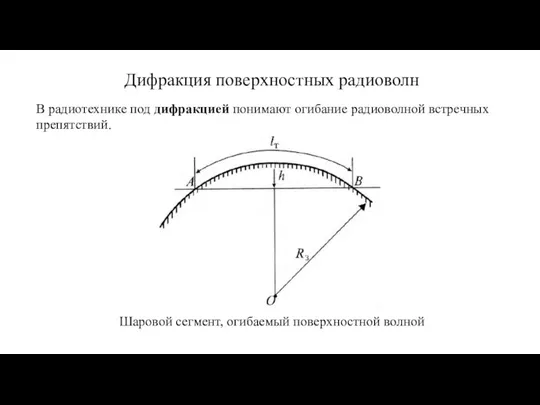
- 35. Дифракция поверхностных радиоволн Шаровой сегмент, огибаемый поверхностной волной В радиотехнике под дифракцией понимают огибание радиоволной встречных
- 36. Поглощение поверхностных волн в почве Этот фактор проявляется тем сильнее, чем ближе параметры почвы к параметрам
- 37. Дополнительный фазовый сдвиг сигнала Комплексный характер относительной диэлектрической проницаемости почвы приводит к дополнительному фазовому сдвигу сигнала,
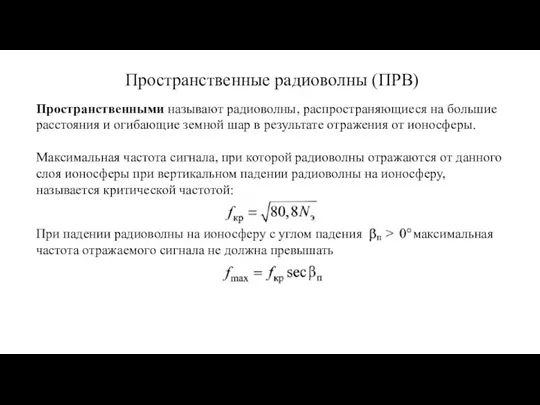
- 38. Пространственные радиоволны (ПРВ) Пространственными называют радиоволны, распространяющиеся на большие расстояния и огибающие земной шар в результате
- 39. Пространственные радиоволны (ПРВ) Приблизительное значение удельного коэффициента поглощения можно рассчитать по формуле
- 40. Радиоволны волноводного тина (РВТ) К этому типу относятся радиоволны, распространяющиеся на очень большие расстояния в свое
- 41. Сравнение свойств радиоволн различных типов Возможности использования радиоволн различных типов для навигационных целей иллюстрируются таблицы, из
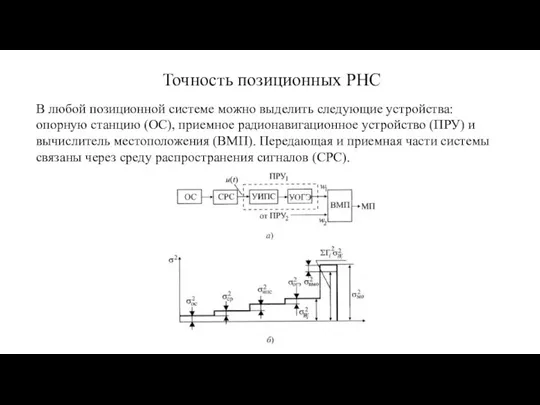
- 42. Точность позиционных РНС В любой позиционной системе можно выделить следующие устройства: опорную станцию (ОС), приемное радионавигационное
- 43. Источники погрешностей местоопределения При нахождении местоположения приходится принимать во внимание форму поверхностей (или линий) положения и
- 44. Точность определения геометрического элемента, характеризующего положение объекта В большинстве РНС связь определяемого геометрического элемента W (координат
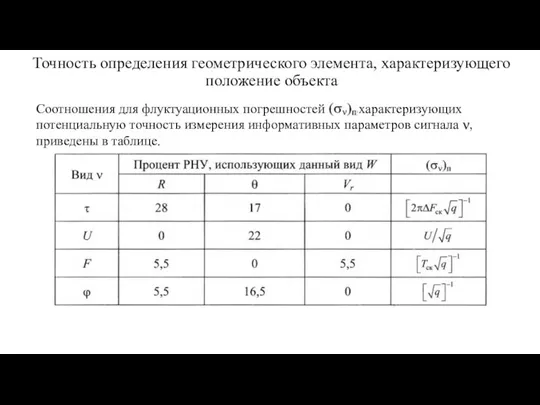
- 45. Точность определения геометрического элемента, характеризующего положение объекта Соотношения для флуктуационных погрешностей характеризующих потенциальную точность измерения информативных
- 46. Точность определения геометрического элемента, характеризующего положение объекта - среднеквадратические ширина спектра и длительность сигнала. Для их
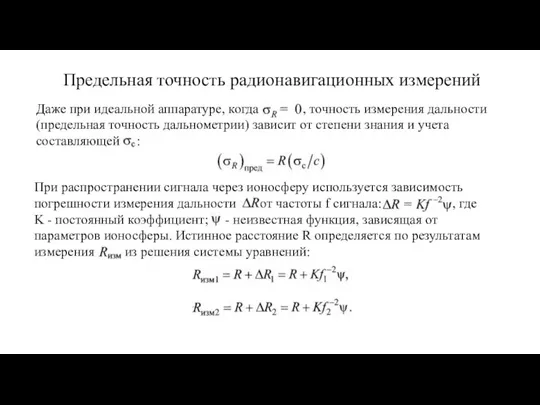
- 47. Предельная точность радионавигационных измерений Эта величина ограничена степенью достоверности принятого при расчетах значения скорости распространения радиоволн.
- 48. Предельная точность радионавигационных измерений Даже при идеальной аппаратуре, когда , точность измерения дальности (предельная точность дальнометрии)
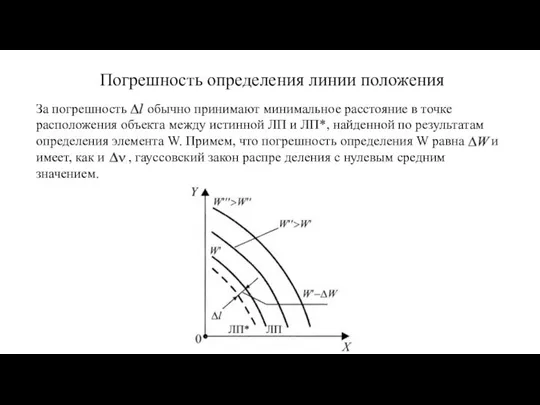
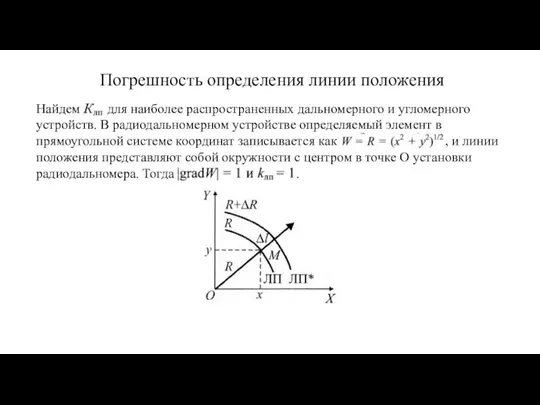
- 49. Погрешность определения линии положения За погрешность обычно принимают минимальное расстояние в точке расположения объекта между истинной
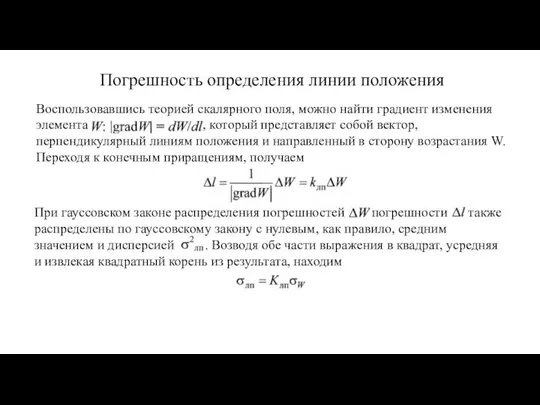
- 50. Погрешность определения линии положения Воспользовавшись теорией скалярного поля, можно найти градиент изменения элемента , который представляет
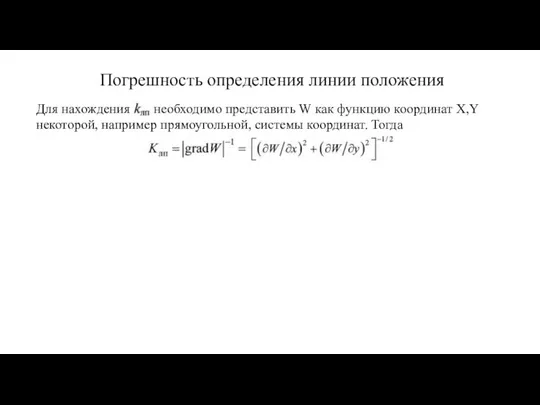
- 51. Погрешность определения линии положения Для нахождения необходимо представить W как функцию координат X,Y некоторой, например прямоугольной,
- 52. Погрешность определения линии положения Найдем для наиболее распространенных дальномерного и угломерного устройств. В радиодальномерном устройстве определяемый
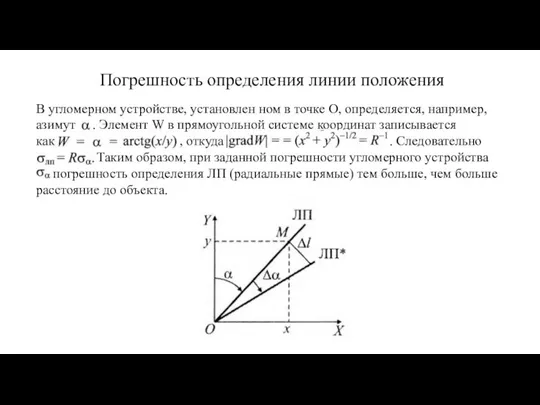
- 53. Погрешность определения линии положения В угломерном устройстве, установлен ном в точке О, определяется, например, азимут .
- 55. Скачать презентацию
Слайд 2Параметры РНС
В системах, определяющих МП, применяется удвоенная СКП определения местоположения (2drms), представляющая
Параметры РНС
В системах, определяющих МП, применяется удвоенная СКП определения местоположения (2drms), представляющая
Слайд 3Параметры РНС
Вводят следующие определения точности:
прогнозируемая точность - точность местоопределения по отношению
Параметры РНС
Вводят следующие определения точности:
прогнозируемая точность - точность местоопределения по отношению
Слайд 4Параметры РНС
Эксплуатационная пригодность (называемая иногда доступностью) - вероятность того, что в любое
Параметры РНС
Эксплуатационная пригодность (называемая иногда доступностью) - вероятность того, что в любое
Слайд 5Классификация радионавигационных устройств и систем
Назначение характеризует класс навигационных задач, для решения которых
Классификация радионавигационных устройств и систем
Назначение характеризует класс навигационных задач, для решения которых
Слайд 6Классификация радионавигационных устройств и систем
Классификация радионавигационных устройств и систем
Слайд 7Классификация радионавигационных устройств и систем
Системы сближения и стыковки (причаливания) предназначены для получения
Классификация радионавигационных устройств и систем
Системы сближения и стыковки (причаливания) предназначены для получения
Слайд 8Классификация радионавигационных устройств и систем
Характер источника информативного сигнала влияет на структуру РНС
Классификация радионавигационных устройств и систем
Характер источника информативного сигнала влияет на структуру РНС
Слайд 9Структурная схема активного РНУ
Структурная схема активного РНУ
Слайд 10Структурная схема активного РНУ с активным ответом
Структурная схема активного РНУ с активным ответом
Слайд 11Структурная схема пассивного РНУ
Структурная схема пассивного РНУ

Слайд 12Структурная схема пассивной многопозиционной РНС
Структурная схема пассивной многопозиционной РНС

Слайд 13Классификация радионавигационных устройств и систем
Вид навигационного параметра W влияет на форму поверхностей
Классификация радионавигационных устройств и систем
Вид навигационного параметра W влияет на форму поверхностей
Слайд 14Классификация радионавигационных устройств и систем
Угломерные РНУ относятся к классу пассивных устройств и
Классификация радионавигационных устройств и систем
Угломерные РНУ относятся к классу пассивных устройств и
Слайд 15Вид информативного параметра сигнала
где
и
В зависимости от того, какой параметр принимаемого на РНУ
Вид информативного параметра сигнала
где
и
В зависимости от того, какой параметр принимаемого на РНУ
Слайд 16Классификация радионавигационных устройств и систем
Степень автономности определяет возможность использования РНУ или РНС
Классификация радионавигационных устройств и систем
Степень автономности определяет возможность использования РНУ или РНС
Слайд 17Дальность действия и точность РНУ и РНС
Одна из основных задач при проектировании
Дальность действия и точность РНУ и РНС
Одна из основных задач при проектировании
Слайд 18Дальность действия и точность РНУ и РНС
Мощность сигнала на входе приемника РНУ
Дальность действия и точность РНУ и РНС
Мощность сигнала на входе приемника РНУ
Слайд 19Дальность действия и точность РНУ и РНС
При радионавигационных измерениях обычно необходимо обеспечить
Дальность действия и точность РНУ и РНС
При радионавигационных измерениях обычно необходимо обеспечить
Слайд 20Дальность действия и точность РНУ и РНС
С помощью предыдущего выражения можно рассчитать
Дальность действия и точность РНУ и РНС
С помощью предыдущего выражения можно рассчитать
Слайд 21Дальность действия и точность РНУ и РНС
Целесообразен вариант активной системы с активным
Дальность действия и точность РНУ и РНС
Целесообразен вариант активной системы с активным
Слайд 22Дальность действия и точность РНУ и РНС
Дальность действия (максимальная рабочая высота) активных
Дальность действия и точность РНУ и РНС
Дальность действия (максимальная рабочая высота) активных
Слайд 23Дальность действия и точность РНУ и РНС
Воспользуемся соотношением для дальности действия активного
Дальность действия и точность РНУ и РНС
Воспользуемся соотношением для дальности действия активного
Слайд 24Дальность действия и точность РНУ и РНС
Используя приближенную формулу и соотношения, определенные
Дальность действия и точность РНУ и РНС
Используя приближенную формулу и соотношения, определенные
Слайд 25Влияние условий распространения радиоволн на дальность действия и точность РНУ
В соответствии с
Влияние условий распространения радиоволн на дальность действия и точность РНУ
В соответствии с
Слайд 26Траектории радиоволн различных типов
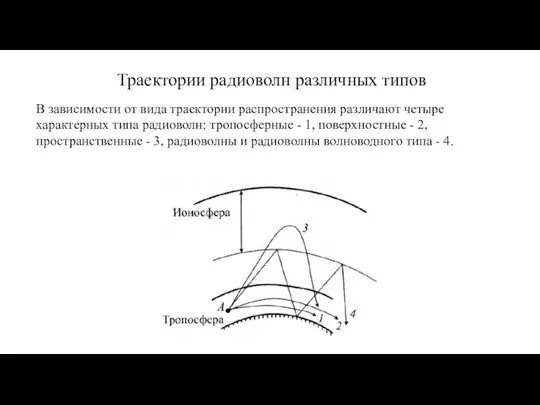
В зависимости от вида траектории распространения различают четыре характерных
Траектории радиоволн различных типов
В зависимости от вида траектории распространения различают четыре характерных
Слайд 27Тропосферные волны (ТВ)
Дальность прямой видимости: ОТ - область тени; Rз= 6370 км
Тропосферные волны (ТВ)
Дальность прямой видимости: ОТ - область тени; Rз= 6370 км

Слайд 28Тропосферные волны (ТВ)
При постоянстве коэффициента преломления атмосферы, т.е. при отсутствии рефракции радиоволны
Тропосферные волны (ТВ)
При постоянстве коэффициента преломления атмосферы, т.е. при отсутствии рефракции радиоволны
Слайд 29Тропосферные волны (ТВ)
Зависимость удельного коэффициента поглощения электромагнитной энергии от длины волны (а)
Тропосферные волны (ТВ)
Зависимость удельного коэффициента поглощения электромагнитной энергии от длины волны (а)
Слайд 30Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Отражение радиоволны
Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Отражение радиоволны

Слайд 31Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Искажение ДНА
Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Искажение ДНА
Слайд 32Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Влияние ДНА
Влияние отраженных от земной поверхности сигналов на диаграмму направленности антенны РНУ
Влияние ДНА
Слайд 33Поверхностные волны (ПВ)
Поверхностными называют радиоволны, которые распространяются в непосредственной близости к поверхности
Поверхностные волны (ПВ)
Поверхностными называют радиоволны, которые распространяются в непосредственной близости к поверхности
Слайд 34Поверхностные волны (ПВ)
Зависимость напряженности электрического поля поверхностной волны от длины волны на
Поверхностные волны (ПВ)
Зависимость напряженности электрического поля поверхностной волны от длины волны на
Слайд 35Дифракция поверхностных радиоволн
Шаровой сегмент, огибаемый поверхностной волной
В радиотехнике под дифракцией понимают огибание
Дифракция поверхностных радиоволн
Шаровой сегмент, огибаемый поверхностной волной
В радиотехнике под дифракцией понимают огибание
Слайд 36Поглощение поверхностных волн в почве
Этот фактор проявляется тем сильнее, чем ближе параметры
Поглощение поверхностных волн в почве
Этот фактор проявляется тем сильнее, чем ближе параметры
Слайд 37Дополнительный фазовый сдвиг сигнала
Комплексный характер относительной диэлектрической проницаемости почвы приводит к дополнительному
Дополнительный фазовый сдвиг сигнала
Комплексный характер относительной диэлектрической проницаемости почвы приводит к дополнительному
Слайд 38Пространственные радиоволны (ПРВ)
Пространственными называют радиоволны, распространяющиеся на большие расстояния и огибающие земной
Пространственные радиоволны (ПРВ)
Пространственными называют радиоволны, распространяющиеся на большие расстояния и огибающие земной
Слайд 39Пространственные радиоволны (ПРВ)
Приблизительное значение удельного коэффициента поглощения можно рассчитать по формуле
Пространственные радиоволны (ПРВ)
Приблизительное значение удельного коэффициента поглощения можно рассчитать по формуле
Слайд 40Радиоволны волноводного тина (РВТ)
К этому типу относятся радиоволны, распространяющиеся на очень большие
Радиоволны волноводного тина (РВТ)
К этому типу относятся радиоволны, распространяющиеся на очень большие
Слайд 41Сравнение свойств радиоволн различных типов
Возможности использования радиоволн различных типов для навигационных целей
Сравнение свойств радиоволн различных типов
Возможности использования радиоволн различных типов для навигационных целей

Слайд 42Точность позиционных РНС
В любой позиционной системе можно выделить следующие устройства: опорную станцию
Точность позиционных РНС
В любой позиционной системе можно выделить следующие устройства: опорную станцию
Слайд 43Источники погрешностей местоопределения
При нахождении местоположения приходится принимать во внимание форму поверхностей (или
Источники погрешностей местоопределения
При нахождении местоположения приходится принимать во внимание форму поверхностей (или
Слайд 44Точность определения геометрического элемента, характеризующего положение объекта
В большинстве РНС связь определяемого геометрического
Точность определения геометрического элемента, характеризующего положение объекта
В большинстве РНС связь определяемого геометрического
Слайд 45Точность определения геометрического элемента, характеризующего положение объекта
Соотношения для флуктуационных погрешностей характеризующих потенциальную
Точность определения геометрического элемента, характеризующего положение объекта
Соотношения для флуктуационных погрешностей характеризующих потенциальную
Слайд 46Точность определения геометрического элемента, характеризующего положение объекта
- среднеквадратические ширина спектра и
Точность определения геометрического элемента, характеризующего положение объекта
- среднеквадратические ширина спектра и

Слайд 47Предельная точность радионавигационных измерений
Эта величина ограничена степенью достоверности принятого при расчетах значения
Предельная точность радионавигационных измерений
Эта величина ограничена степенью достоверности принятого при расчетах значения
Слайд 48Предельная точность радионавигационных измерений
Даже при идеальной аппаратуре, когда , точность измерения дальности
Предельная точность радионавигационных измерений
Даже при идеальной аппаратуре, когда , точность измерения дальности
Слайд 49Погрешность определения линии положения
За погрешность обычно принимают минимальное расстояние в точке расположения
Погрешность определения линии положения
За погрешность обычно принимают минимальное расстояние в точке расположения
Слайд 50Погрешность определения линии положения
Воспользовавшись теорией скалярного поля, можно найти градиент изменения элемента
Погрешность определения линии положения
Воспользовавшись теорией скалярного поля, можно найти градиент изменения элемента
Слайд 51Погрешность определения линии положения
Для нахождения необходимо представить W как функцию координат X,Y
Погрешность определения линии положения
Для нахождения необходимо представить W как функцию координат X,Y
Слайд 52Погрешность определения линии положения
Найдем для наиболее распространенных дальномерного и угломерного устройств. В
Погрешность определения линии положения
Найдем для наиболее распространенных дальномерного и угломерного устройств. В
Слайд 53Погрешность определения линии положения
В угломерном устройстве, установлен ном в точке О, определяется,
Погрешность определения линии положения
В угломерном устройстве, установлен ном в точке О, определяется,
 Презентация на тему Электромагнитная индукция
Презентация на тему Электромагнитная индукция  Колебательный контур. Электромагнитные колебания. Принцип радиосвязи и телевидения
Колебательный контур. Электромагнитные колебания. Принцип радиосвязи и телевидения Устройство механической коробки передач
Устройство механической коробки передач Презентация на тему Постоянные магниты. Магнитное поле Земли
Презентация на тему Постоянные магниты. Магнитное поле Земли  Электричество. Постоянный электрический ток
Электричество. Постоянный электрический ток Применение конденсаторов
Применение конденсаторов Нанотехнологии в производстве изделий электронной техники
Нанотехнологии в производстве изделий электронной техники Волновые свойства света
Волновые свойства света Презентация на тему Удельная теплоемкость
Презентация на тему Удельная теплоемкость  Твердофазные реакции
Твердофазные реакции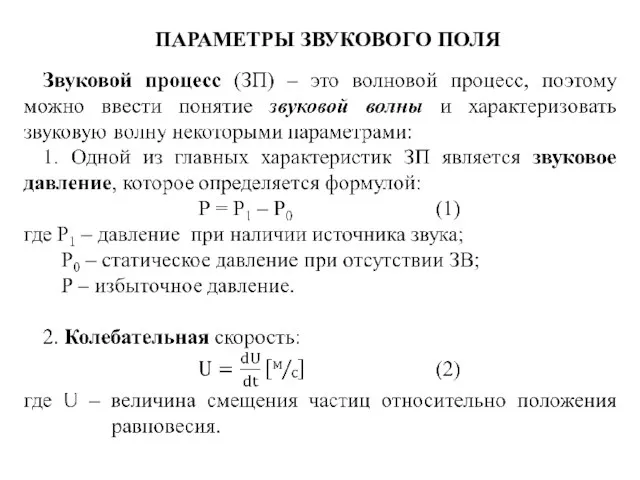 Параметры звукового поля
Параметры звукового поля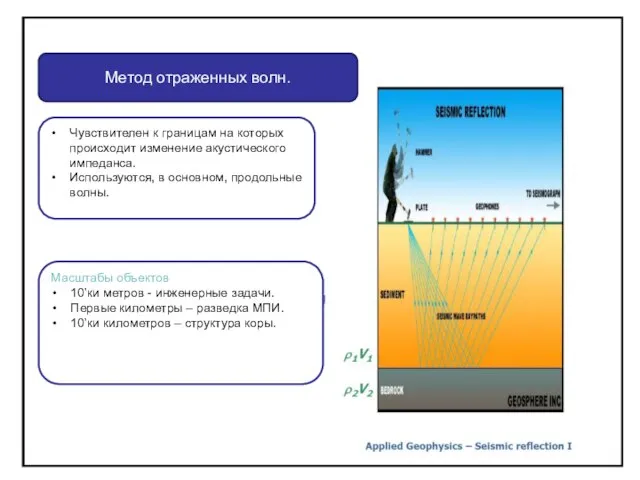 Закон Снеллиуса (отражения) для монотипных волн
Закон Снеллиуса (отражения) для монотипных волн Атомная наука
Атомная наука 4 (1)
4 (1) Визначення сталой в законі Стефана-Больцмана. Лабораторна робота № 50
Визначення сталой в законі Стефана-Больцмана. Лабораторна робота № 50 Сопротивление потоку
Сопротивление потоку Голография. Физические принципы
Голография. Физические принципы Построение изображений в линзах
Построение изображений в линзах Основные и дополнительные средства защиты в сетях напряжением выше 1000 в
Основные и дополнительные средства защиты в сетях напряжением выше 1000 в Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость Презентация на тему Геометрическая оптика
Презентация на тему Геометрическая оптика  Энергетические методы расчёта упругих систем
Энергетические методы расчёта упругих систем Машины для отделочных работ. Тема 8
Машины для отделочных работ. Тема 8 Принципы действия тепловых двигателей
Принципы действия тепловых двигателей Давление твердых тел, жидкостей и газов
Давление твердых тел, жидкостей и газов Источники звука. Звуковая энергия. Плотность звуковой энергии. Лекция 4
Источники звука. Звуковая энергия. Плотность звуковой энергии. Лекция 4 Сила
Сила Устройство, принцип работы, диагностика и техническое обслуживание автомобильных генераторов
Устройство, принцип работы, диагностика и техническое обслуживание автомобильных генераторов