- Сингулярность. Сингулярные конфигурации

Содержание
- 6. Характерные черты сингулярных конфигураций Движение вдоль некоторых направлений может оказаться невозможным Для достижения конечной скорости выходного
- 7. Нахождение сингулярных конфигураций с помощью определителя Якобиана
- 8. Декомпозиция манипуляционных систем с 6 степенями свободы
- 9. Декомпозиция манипуляционных систем с 6 степенями свободы
- 10. Декомпозиция манипуляционных систем с 6 степенями свободы Выберем
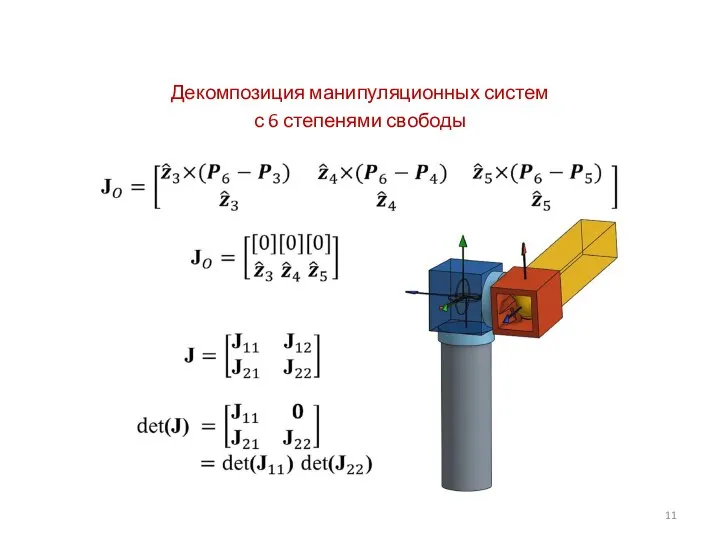
- 11. Декомпозиция манипуляционных систем с 6 степенями свободы
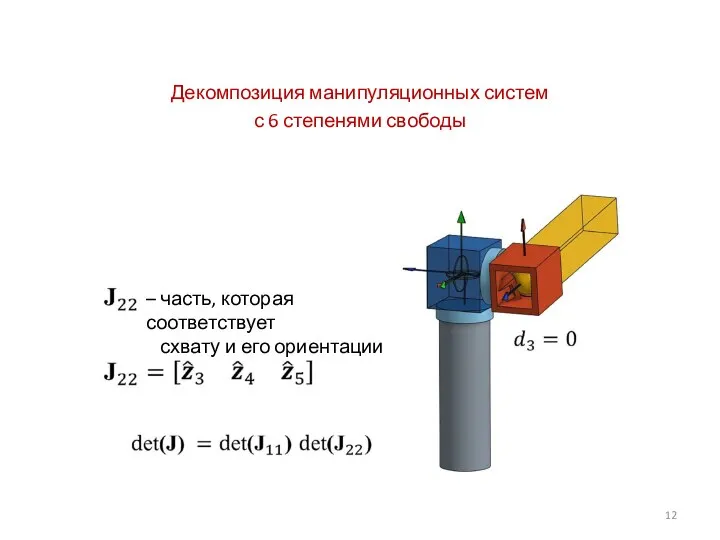
- 12. Декомпозиция манипуляционных систем с 6 степенями свободы – часть, которая соответствует схвату и его ориентации
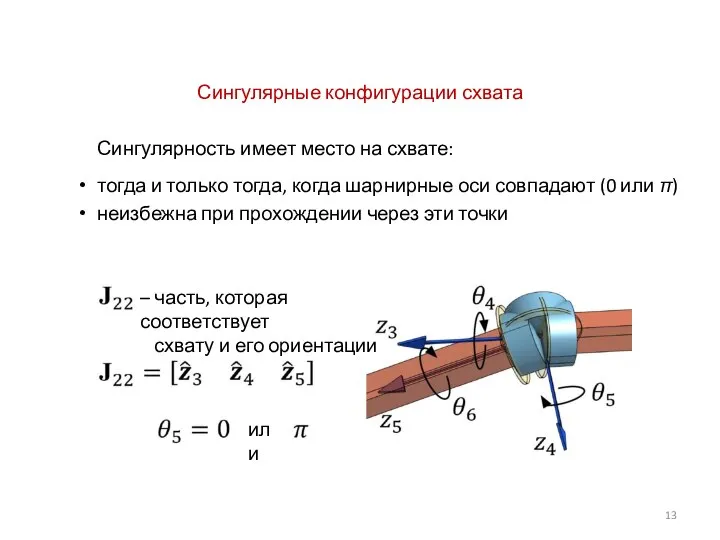
- 13. Сингулярные конфигурации схвата Сингулярность имеет место на схвате: тогда и только тогда, когда шарнирные оси совпадают
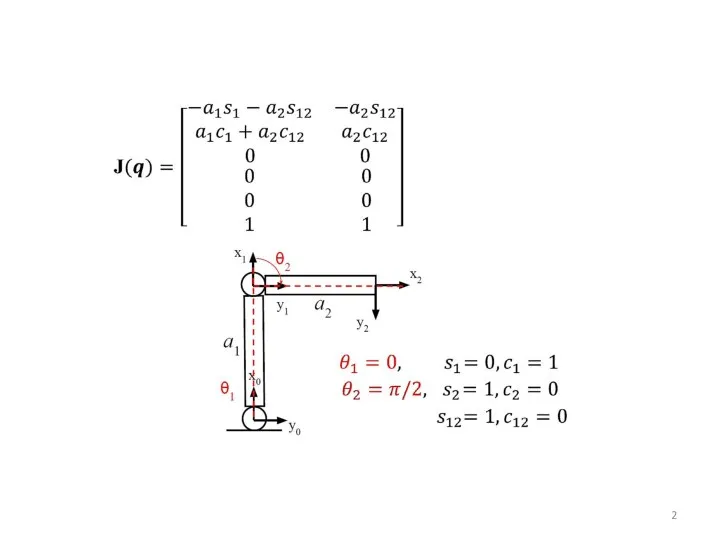
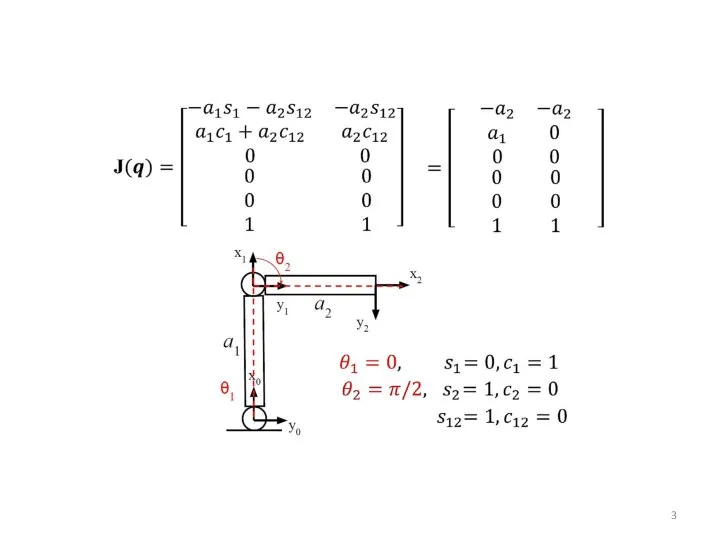
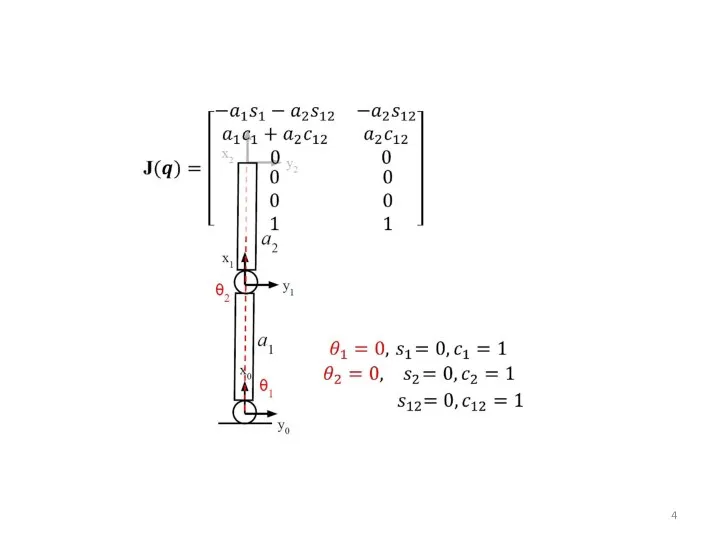
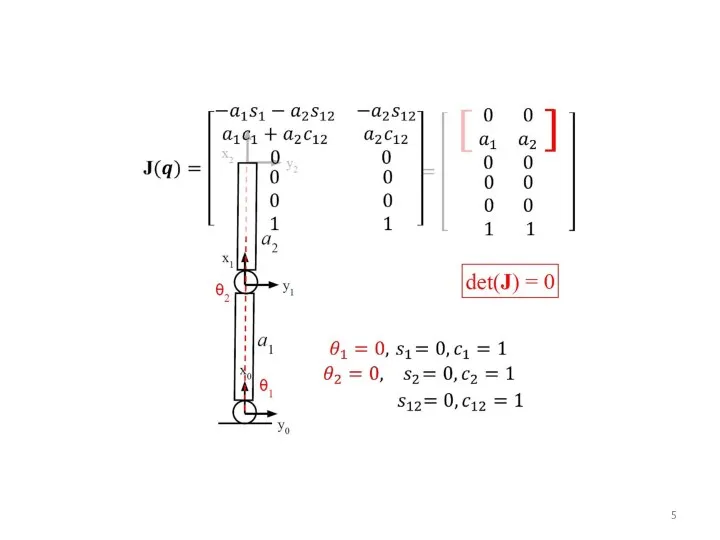
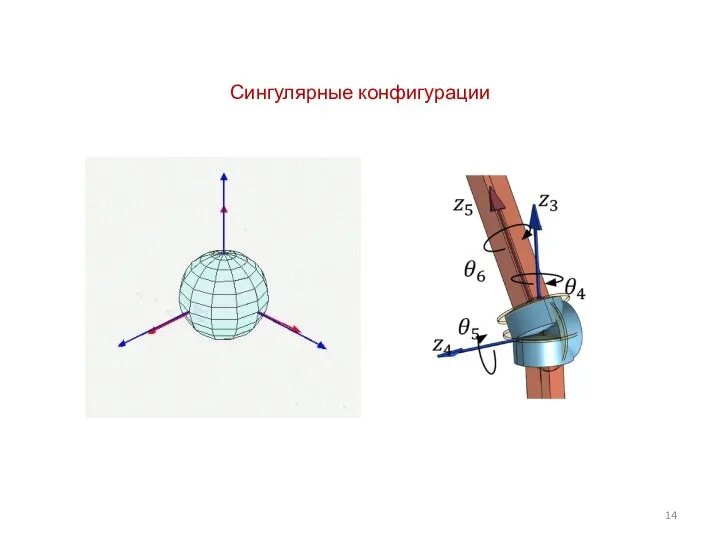
- 14. Сингулярные конфигурации
- 15. Сингулярные конфигурации руки – Якобиан положения для звеньев 1-3
- 16. Сингулярные конфигурации руки
- 17. Сингулярные конфигурации системы с 6 степенями свободы
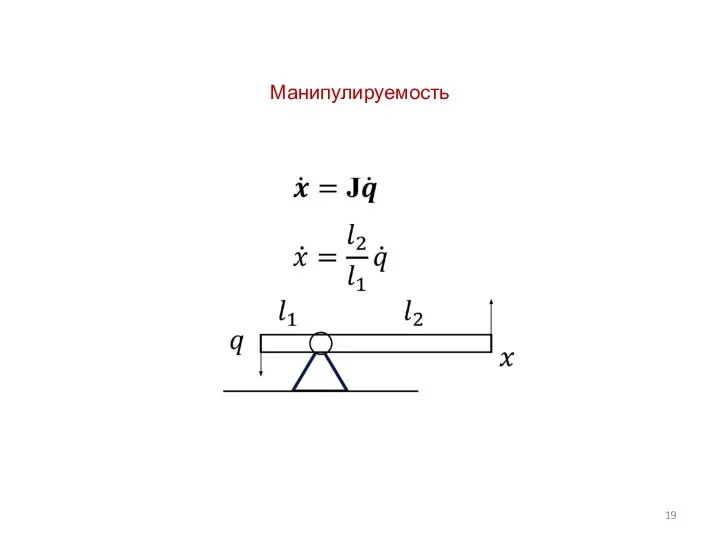
- 18. Манипулируемость
- 19. Манипулируемость
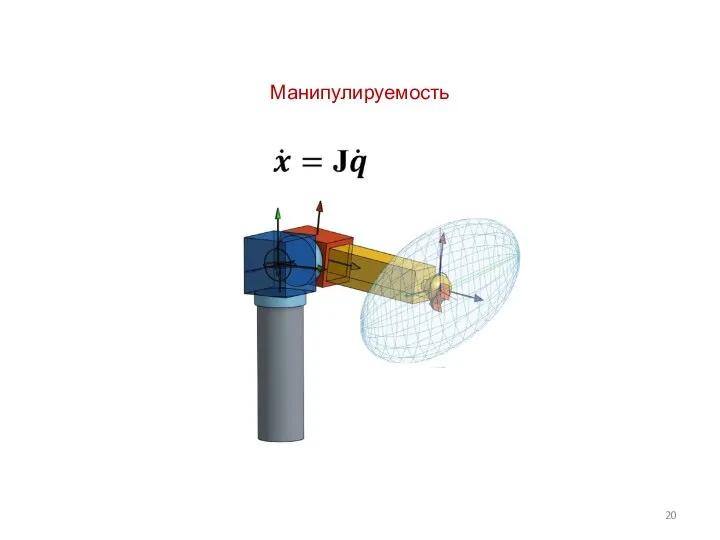
- 20. Манипулируемость
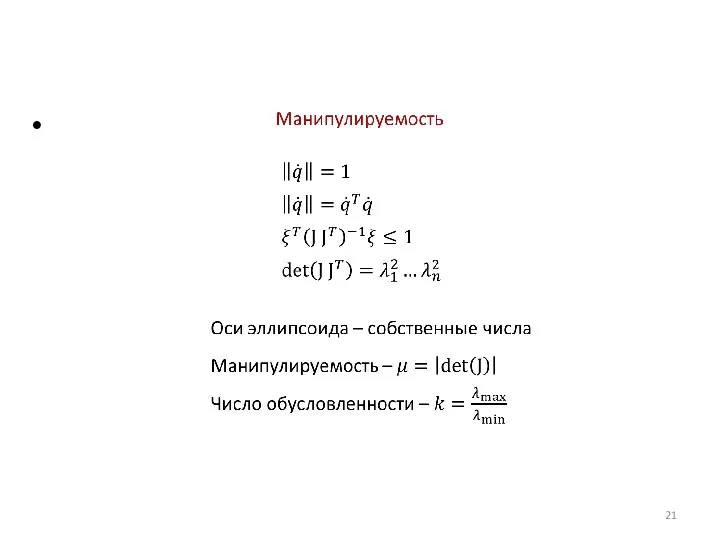
- 22. Манипулируемость
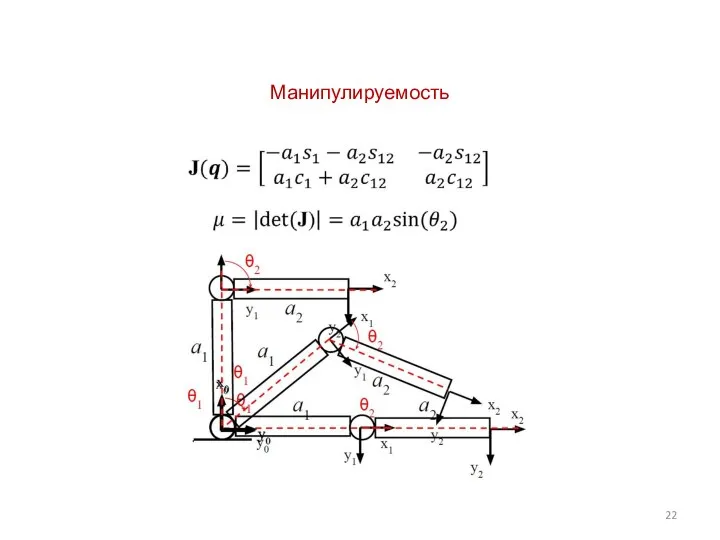
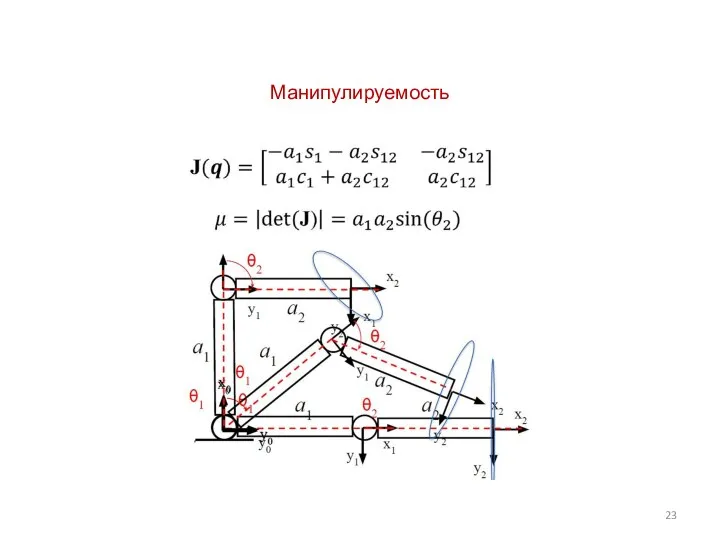
- 23. Манипулируемость
- 25. Скачать презентацию
Слайд 6Характерные черты сингулярных конфигураций
Движение вдоль некоторых направлений может оказаться невозможным
Для достижения конечной
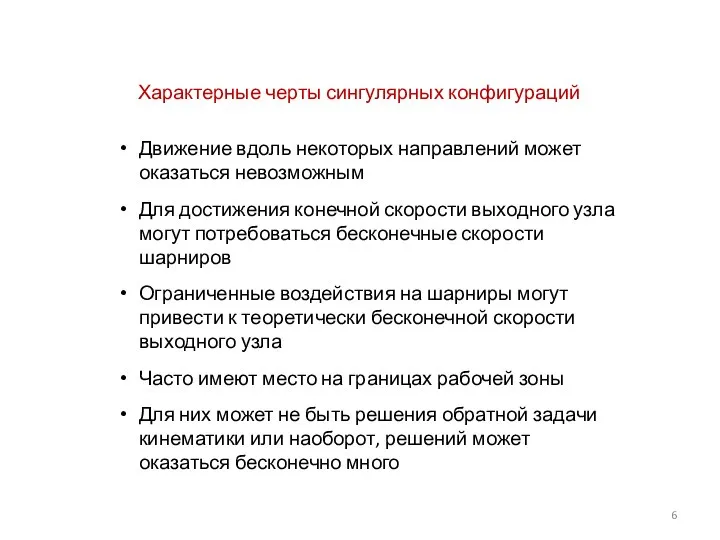
Характерные черты сингулярных конфигураций
Движение вдоль некоторых направлений может оказаться невозможным
Для достижения конечной
Слайд 7Нахождение сингулярных конфигураций
с помощью определителя Якобиана
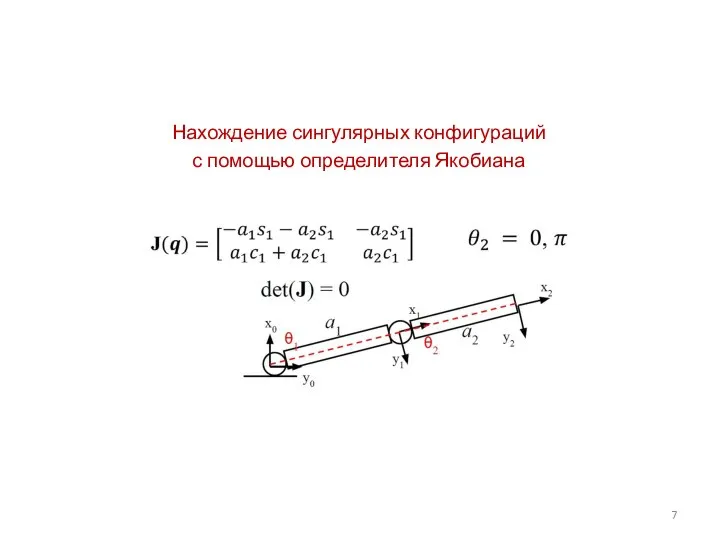
Нахождение сингулярных конфигураций
с помощью определителя Якобиана
Слайд 8Декомпозиция манипуляционных систем
с 6 степенями свободы
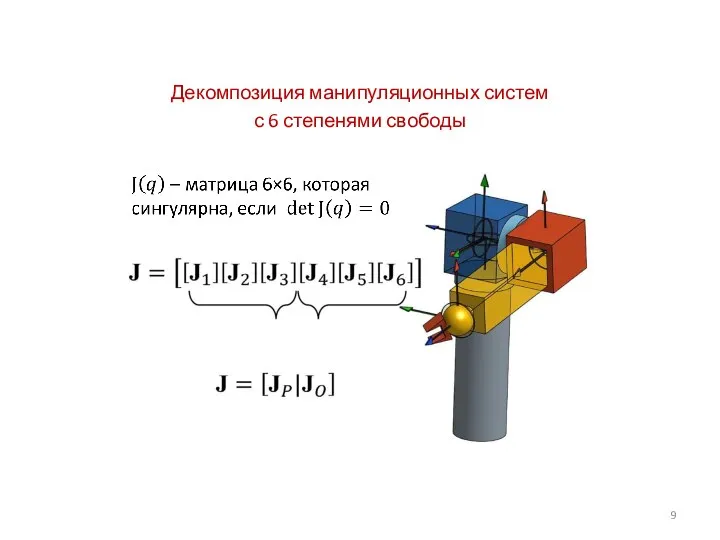
Декомпозиция манипуляционных систем
с 6 степенями свободы

Слайд 9Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
Слайд 10Декомпозиция манипуляционных систем
с 6 степенями свободы
Выберем
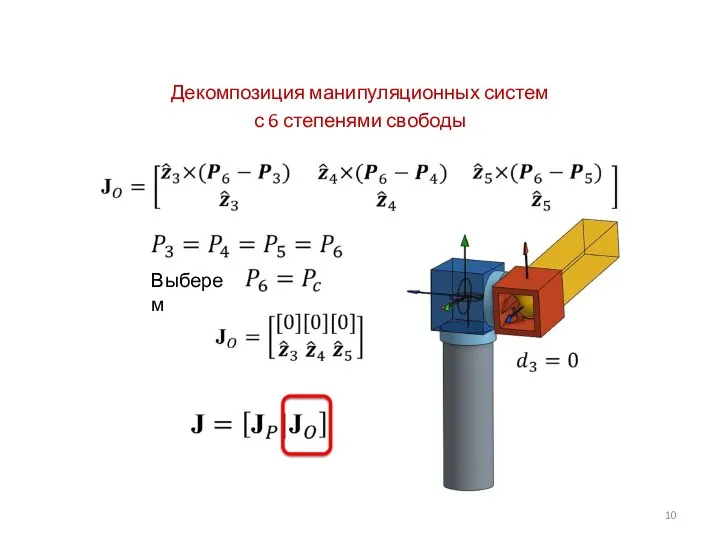
Декомпозиция манипуляционных систем
с 6 степенями свободы
Выберем
Слайд 11Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
Слайд 12Декомпозиция манипуляционных систем
с 6 степенями свободы
– часть, которая соответствует
схвату и
Декомпозиция манипуляционных систем
с 6 степенями свободы
– часть, которая соответствует
схвату и
Слайд 13Сингулярные конфигурации схвата
Сингулярность имеет место на схвате:
тогда и только тогда, когда шарнирные
Сингулярные конфигурации схвата
Сингулярность имеет место на схвате:
тогда и только тогда, когда шарнирные
Слайд 14Сингулярные конфигурации
Сингулярные конфигурации
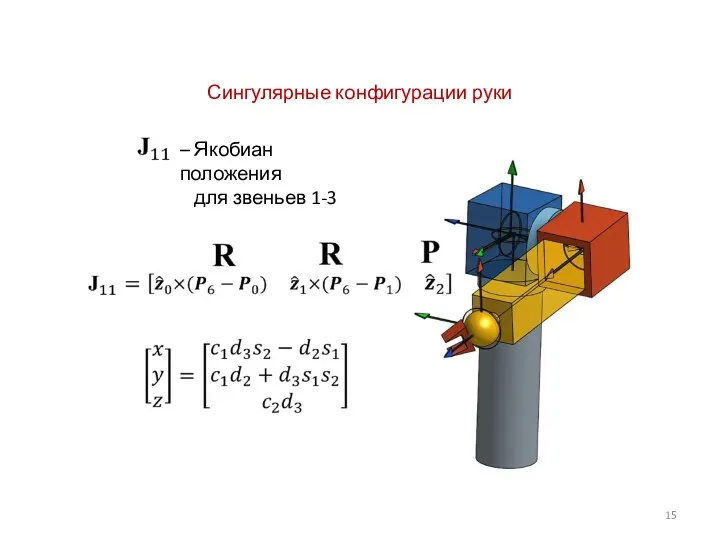
Слайд 15Сингулярные конфигурации руки
– Якобиан положения
для звеньев 1-3
Сингулярные конфигурации руки
– Якобиан положения
для звеньев 1-3
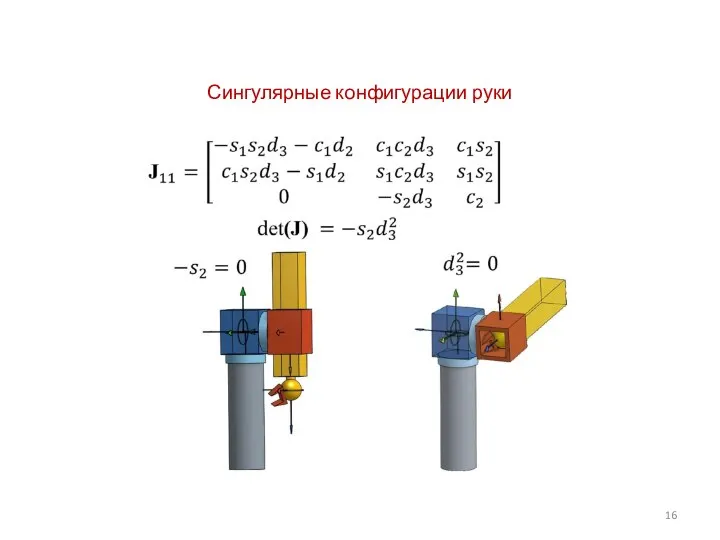
Слайд 16Сингулярные конфигурации руки
Сингулярные конфигурации руки
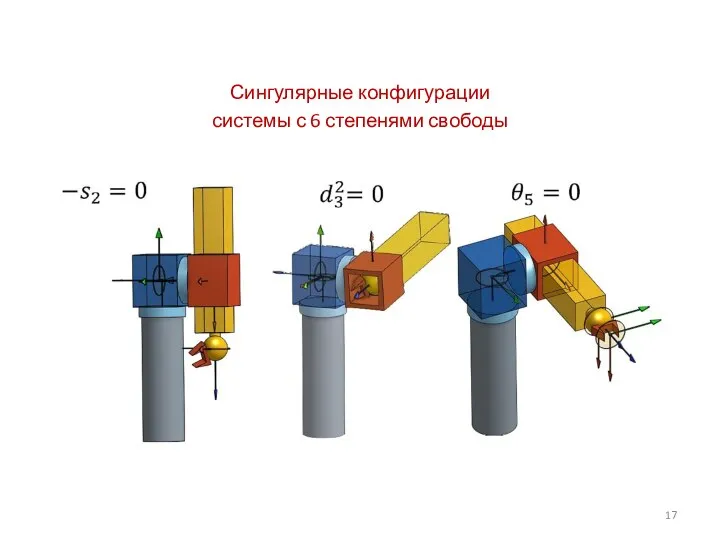
Слайд 17Сингулярные конфигурации
системы с 6 степенями свободы
Сингулярные конфигурации
системы с 6 степенями свободы
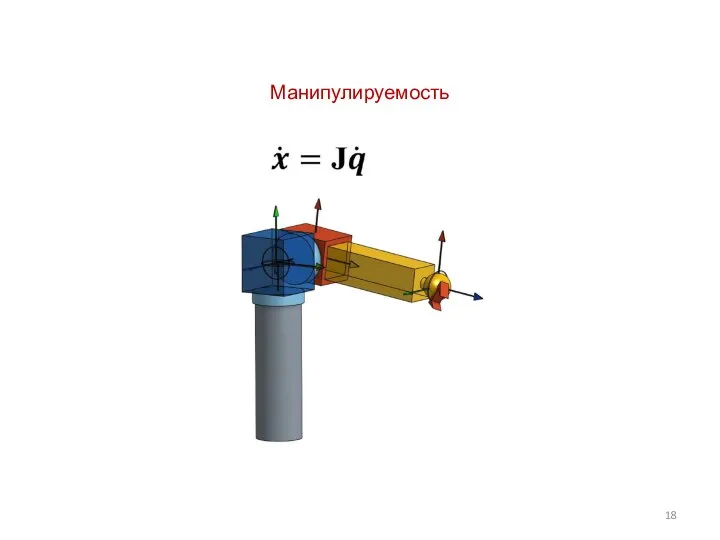
Слайд 18Манипулируемость
Манипулируемость
Слайд 19Манипулируемость
Манипулируемость
Слайд 20Манипулируемость
Манипулируемость
Слайд 22Манипулируемость
Манипулируемость
Слайд 23Манипулируемость
Манипулируемость
 Презентация на тему Снег
Презентация на тему Снег  Электроснабжение. Схемы к расчетному заданию
Электроснабжение. Схемы к расчетному заданию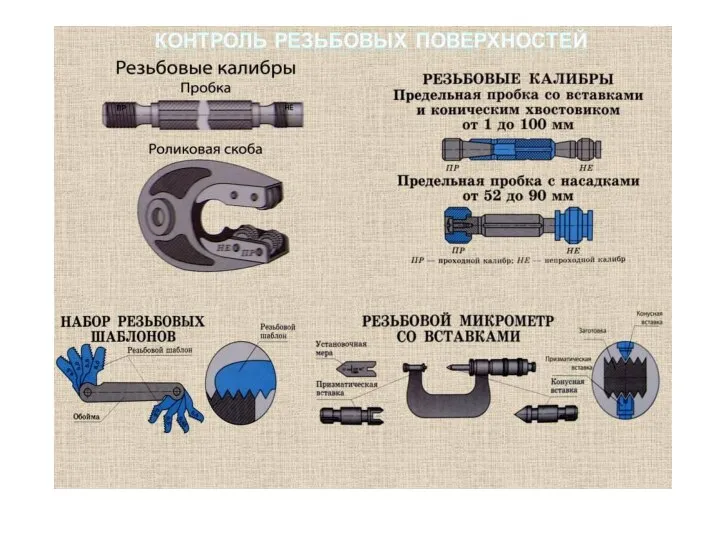 Технология обработки на металлорежущих станках. Контроль резьбовых поверхностей
Технология обработки на металлорежущих станках. Контроль резьбовых поверхностей 04_Магнетизм и трансформатор-1
04_Магнетизм и трансформатор-1 Техническое обслуживание и текущий ремонт электрооборудования
Техническое обслуживание и текущий ремонт электрооборудования Плазма и её использование
Плазма и её использование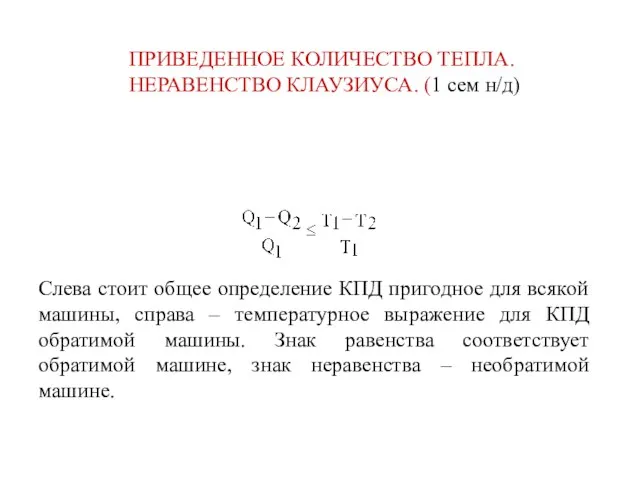 Приведенное количество тепла. Неравенство Клаузиуса
Приведенное количество тепла. Неравенство Клаузиуса I закон термодинамики
I закон термодинамики Машиноведение. Строение машинной иглы, регулятора длины стежка. Уход за швейной машиной
Машиноведение. Строение машинной иглы, регулятора длины стежка. Уход за швейной машиной Презентация на тему Сила упругости
Презентация на тему Сила упругости  О, сколько нам открытий чудных…
О, сколько нам открытий чудных… Лекция 33. Волновая функция
Лекция 33. Волновая функция Микроскоп
Микроскоп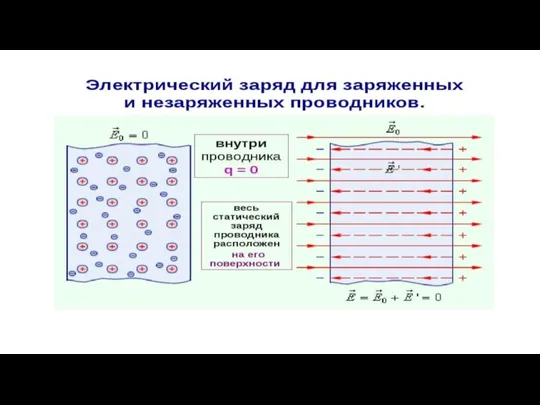 Распределение зарядов по поверхности проводника
Распределение зарядов по поверхности проводника Взаимодействие тел. Трение
Взаимодействие тел. Трение Распознавание технических состояний объектов авиационного оборудования по критерию Неймана-Пирсона
Распознавание технических состояний объектов авиационного оборудования по критерию Неймана-Пирсона Torpagbecheren maşinlar və alətlər
Torpagbecheren maşinlar və alətlər Жоғары вольтты айнымалы токтың экономикалық артықшылығын түсіну. 11 класс
Жоғары вольтты айнымалы токтың экономикалық артықшылығын түсіну. 11 класс Свободные электромагнитные колебания
Свободные электромагнитные колебания Балочные системы
Балочные системы Ложные воспоминания
Ложные воспоминания Муфта сцепления на тракторе
Муфта сцепления на тракторе Відновлення працездатності засобами фізичної рекреації
Відновлення працездатності засобами фізичної рекреації Лекция 4(ОИ) (студентам)
Лекция 4(ОИ) (студентам) Электромагниты и их пременения
Электромагниты и их пременения Сверхпроводимость материалов
Сверхпроводимость материалов Магнитное поле. Лекция 22. Магнитный поток. Закон фарадея. Самоиндукция
Магнитное поле. Лекция 22. Магнитный поток. Закон фарадея. Самоиндукция Онзангер постулаты
Онзангер постулаты